
ドローンレビュー: Eachine Nano LR3 ドローンレビュー
概要
スコア:3。 6
Eachine Nano LR3 は、2 個のバッテリーを使用する非常に高性能な超軽量 3 インチ マイクロ クアッドコプターです。 FRSKY、FlySky、TBS クロスファイアなど、複数の外部受信機オプションも同梱されています。
GPS フェールセーフが正しく設定されている場合、TX 信号が失われた場合でもドローンは自律的に離陸ゾーンに戻ることができます。 そのサイズと重量を考えると、20 分近い飛行時間は本当に印象的です。
長所
- Insta360 GO2 および 2S 構成で 250 グラム未満;
- GPS フェールセーフ RTH;
- 標準 18650 リチウムイオン電池;
- 優れたバッテリー寿命;
- SMO 4K、Insta360 GO2、または DJI Action 2 カメラを搭載可能;
短所
- 文書化が不十分;
- GPS の修正が遅い;
- VTX ボタンにアクセスできません。
ユーザーレビュー
( 票)-
価格性能比: 3。 8
-
ビルド品質:3。 9
-
カメラ & FPV & OSD:3. 9
-
飛行性能:3。 5
- GPS機能3. 2
Nano LR3 のそれぞれの実践レビュー
BetaFPV ExpressLRS Nano RXモジュールをインストールしたかったため、PNP バージョン (無線受信機なし) を選択しました。 Eachine Nano LR3 は、次の付属品とともに完全に組み立てられた状態で届きます: 2 つのゴムバンド、2 セットのプロペラ + ネジ、およびナット付きカメラネジ。 メーカーにはバッテリーが付属していないため、Aldona Yu にテスト用に Eachine 18650 2500mAh バッテリーを 1 組送ってもらうように依頼しました。
概要
各 LR3 のホイールベースは 144 mm で、「デッドキャット」フレーム設計です。 残念ながらアームのみカーボンファイバー製です。 残りの部品はプラスチック製です。 1 つのバッテリーはドローンの上部から装填され、2 つ目はドローンの腹部から装填されます。 下部バッテリーを保護する 2 つの 3D プリント製着陸スキッドが付いています。 18650 LI-ION バッテリーは、2 本のゴムバンドを使用してフレームに固定されています。 2 つのバッテリーは直列に接続されているため、ドローンの電源を入れるには両方のバッテリーを装填する必要があります。 フレームの上部ではプラスの端 (+) が前方に、マイナスの端 (-) が後方にあり、下部ではその逆になることに注意してください。 電池の取り付けを誤ると、電子機器が焼損する可能性があります。
下の比較画像では、この 3 インチと 5 インチ HGLRC Sector 5 V3 のサイズの違いがわかります。 また、重量にも大きな違いがあります (185g とバッテリー込みの場合は 652g)。

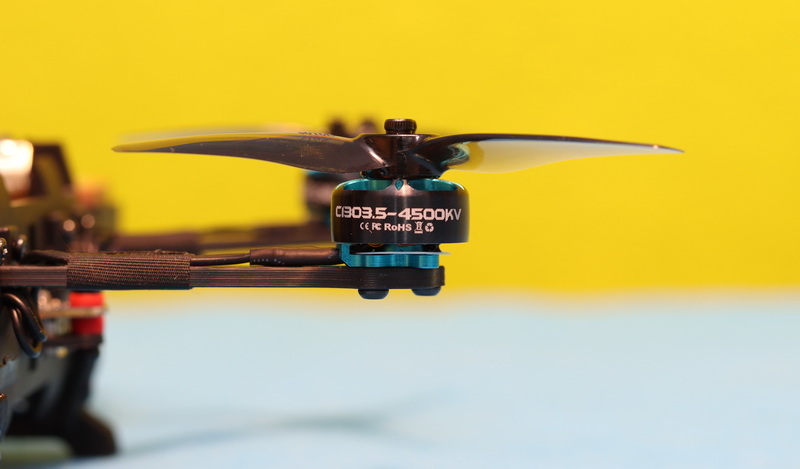
Hglrc Zeus 5A AIO ファイト コントローラーはフレーム上で斜めに配置されているため、角が 2 つ露出しており、衝突時にさらに脆弱になります。 USB ポートと RX はんだ付けパッドには、ドローンを分解することなく簡単にアクセスできます。 M80 GPS モジュールと 5. 8GHz VTX アンテナが尾を形成し、サソリのように見えます。 1303です。 5 つの 4500KV モーターには 3 枚葉のプロペラが装備されています。 安定性よりもパフォーマンスを優先する場合は、2 リーフのものに置き換えてみてください。 モーターワイヤーは適切に配線され、布テープでアームに固定されています。
長距離飛行向けに設計されており、ハイパワー 5 が搭載されています。 8GHzのVTXボード。 ニーズに応じて、ブロードキャスト電力を 25、100、200、400mW の間で切り替えることができます。 CADDX Nano ANT カメラは、上部にアクション カメラ マウントが付いたプラスチック ブラケットに取り付けられます。

価格と在庫状況
PNP パッケージの価格は$174 です。 78 では、5 つの異なる無線受信機 (CRFS Nano V2、FlySKy FS-A8S V2、FrSky R-XSR、XM+ または R9MM OTA) とのコンボが利用可能です。 無線モジュールには、選択したバージョンに応じて 10 ~ 30 ドルの追加料金がかかります。 ドローンと一緒に、Eachine 3 を 1 組注文することを忘れないでください。 7V 2500mAh 18650 リチウムイオン、および互換性のある充電器をお持ちでない場合はご利用ください。
初期設定、飛行準備
確かに、このドローンは初めてのパイロットを対象としたものではありません。 付属の小さなユーザー マニュアルには、フライト コントローラーのピン配置 (配線図) と VTX パラメーター (CH と電源) の調整方法に関する基本的な情報のみが記載されています。 問題は、すべての変更を行うには、FPV 送信機のボタンにアクセスする必要があるということです。

私のように PNP バージョンを注文した場合、最初に行う必要があるのは無線受信機をインストールすることです。 私の製品にはあらかじめはんだ付けされた SBUS コネクタが付属しており、プロセスが簡単になりました。 RXアンテナマウントは付属していないので、フロントアームに結束バンドで固定することにしました。
プロペラを取り付けてバッテリーをロードする前に、BetaFlight コンフィギュレーターでストック設定を確認する必要があります。 ここで、希望の送信機スイッチ レイアウトを設定し、OSD カスタマイズを行うことができます。
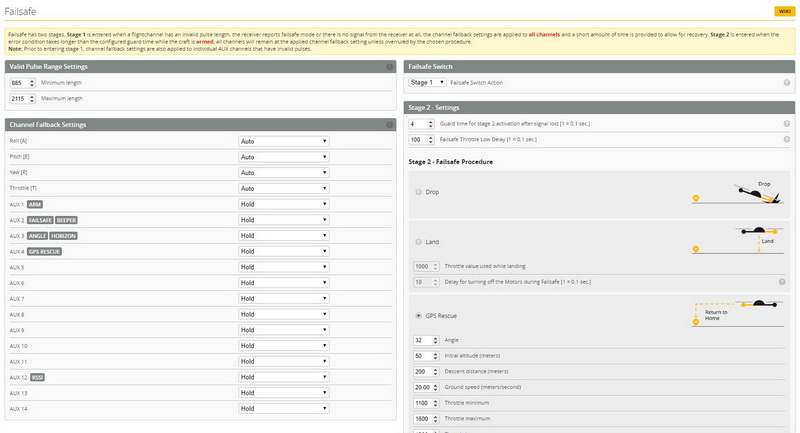
GPS レスキュー モードは、[フェールセーフ] タブでカスタマイズして有効にすることができます (詳細モードでのみ表示されます)。 衛星の受信範囲が狭いゾーンを飛行している場合は、「最小限の衛星」を 6 に設定することをお勧めします。 ここに重要なスイッチ「修正なしでアーミングを許可」があります。 この機能を有効にしないと、ホームポイントがロックされた後でのみ準備と離陸を行うことができます。 屋内にいる場合は、このオプションを有効にする必要があります。
飛行体験
最初に屋内ホバリングをテストしましたが、これは賢明なアイデアであることがわかりました。 数秒間飛行した後、OSD に突然「RXloss」と表示され、ドローンが落下しました。 毎回同じ現象が発生しました。 次に、問題があったと思われる LDARC EX8 と FrSky XM+ の代わりに、Jumper T-lite コントローラーと ELRS RX を使用しました。

離陸するにはスロットルを 50% まで押す必要があるため、特に追加のカメラを取り付ける場合は、この小さな男からのパワーをあまり期待しないでください。 MarbleKitが言うように、「空飛ぶクジラ」のようなものです。
FPV 画面に多数の飛行データ (システム電圧、温度、GPS 座標、飛行高度、人工地平線) が表示されると、本物の平原のコックピットのように見えます :)

飛行位置にある 6 つの衛星を修正するには 2 分以上かかります。 15分待っても衛星は11個しか見つかりませんでした。 GPS の飛行距離は正確でしたが、高度は正しくなかったようです。実際に登っていないのに、高度は 5 メートルから 180 メートルに変化しました。
