Zestaw deweloperski programowalnego drona Raspberry Pi F450-4B - Pixhawk DIY Ardupilot Przemysłowe platformy dronowe typu open source
Zestaw deweloperski programowalnego drona Raspberry Pi F450-4B - Pixhawk DIY Ardupilot Przemysłowe platformy dronowe typu open source
RCDrone
Nie można załadować gotowości do odbioru
Przegląd
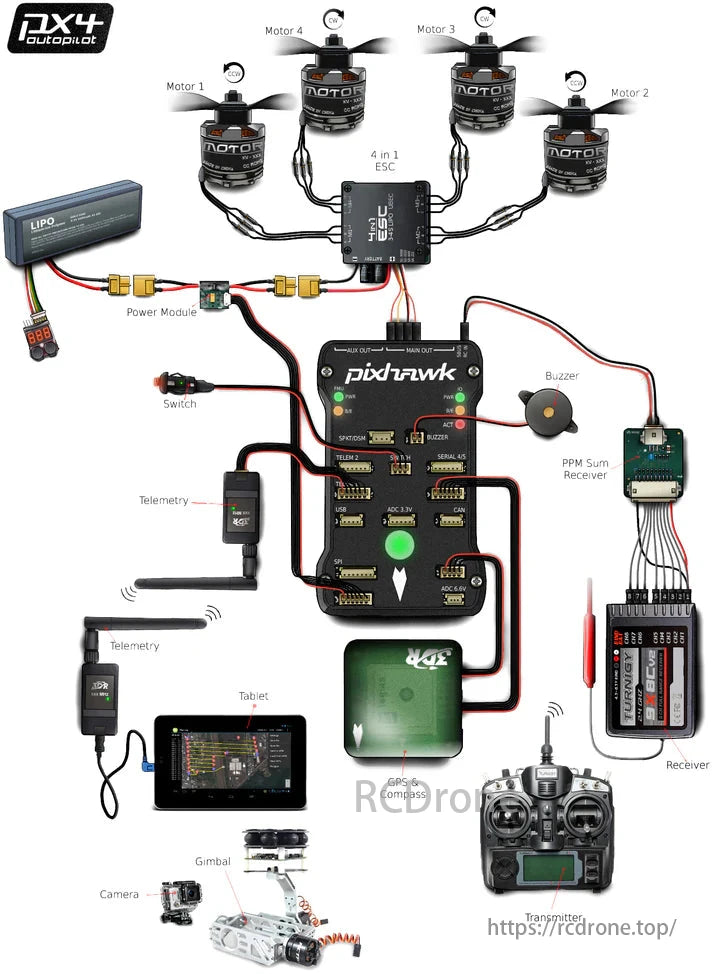
Ten F450-4B Dron Raspberry Pi jest zaawansowany Zestaw do samodzielnego montażu drona który łączy w sobie potężne Raspberry Pi 4B komputer pokładowy z wszechstronnym Kontroler lotu Pixhawk 2.4.8, co czyni go wysoce konfigurowalnym i programowalny dron platforma. To Platforma dronów typu open source obsługuje najnowocześniejsze narzędzia, takie jak Dronekit-python, umożliwiając deweloperom tworzenie autonomicznych misji, transmisji danych w czasie rzeczywistym i aplikacji do przetwarzania obrazu zasilanych przez AI. Dzięki solidnej ramie 450 mm, kamerze HD 200 MP, baterii 3S 5200 mAh zapewniającej do 20 minut lotu oraz zaawansowanym trybom lotu, takim jak utrzymywanie wysokości, powrót do domu i tryb koła, zestaw F450 Drone Kit jest idealnym wyborem dla entuzjastów, badaczy i edukatorów poszukujących innowacyjnego doświadczenia w zakresie rozwoju dronów.
Główne cechy
Sprzęt o wysokiej wydajności
- Raspberry Pi 4B: Urządzenie wyposażone jest w 64-bitowy czterordzeniowy procesor 1,5 GHz, obsługuje wyjście wideo 4K i szybką komunikację WiFi, co gwarantuje niezawodną pracę.
- Kontroler lotu Pixhawk 2.4.8:Wyposażony w wiele zintegrowanych czujników, zapewniających precyzyjną kontrolę położenia, zawisu i planowania misji.
- Wsparcie rozszerzenia wizji:W połączeniu z kamerą monokularową i narzędziami OpenCV zestaw ten zaspokaja potrzeby transmisji i przetwarzania obrazu w czasie rzeczywistym.
Różne tryby lotu
- Utrzymywanie wysokości (AltHold):Utrzymuje stabilną wysokość lotu.
- Wahać się:Zapewnia precyzyjne, stacjonarne zawisanie.
- Powrót do domu (Powrót): Automatyczny powrót do punktu początkowego w przypadku utraty sygnału lub niskiego poziomu naładowania baterii.
- Lądowanie (Ląd):Wykonuje płynne, autonomiczne lądowanie.
- Tryb stabilizacji:Automatycznie dostosowuje położenie podczas lotu.
- Tryb koła:Wykonuje loty okrężne wokół celu.
- Tryb bezgłowy:Usuwa ograniczenia kierunkowe, zapewniając łatwiejszą kontrolę.
- Powrót poza kontrolą:Powraca do ustawionej lokalizacji w przypadku utraty sygnału.
- Lądowanie o małej mocy:Bezpieczne lądowanie przy niskim poziomie naładowania akumulatora.
Transmisja danych i przetwarzanie obrazu
- Tworzy lokalną sieć WiFi poprzez wbudowany punkt dostępu bez konieczności stosowania zewnętrznych routerów, umożliwiając transmisję danych i obrazu w czasie rzeczywistym.
- Obsługuje strumieniowe przesyłanie wideo i analizę opartą na standardzie OpenCV, co idealnie nadaje się do monitorowania obrazu i inteligentnych zastosowań.
Specyfikacje
Parametry drona
| Parametr | Bliższe dane |
|---|---|
| Nazwa | Zestaw drona F450 |
| Rozstaw osi | 450 mm |
| Waga | 1493 g (z baterią i Raspberry Pi 4B) |
| Kontroler lotu | Wersja Pixhawk 2.4.8 kontrolerów lotu typu open-source |
| Komputer pokładowy | Raspberry Pi 4B |
| Kamera | 200MP HD 1080P |
| Wsparcie podczas zawisu | Moduł przepływu optycznego i czujnik odległości laserowej |
| Moduł GPS | m8n GPS |
| Czas lotu | ~20 minut (w zależności od środowiska i misji) |
| Bateria | 3S 5200mAh (11,1 V) |
| Ładowność | 500g |
| Odporność na wiatr | Poziom 3-4 |
| Silnik | SłonecznySky A2212 |
| ESC | Hobbywing 20A ESC (obsługuje akumulatory LiPo 3S-4S) |
| Śmigła | Śmigła samoblokujące T1045 |
| Maksymalna wysokość | 2000m (bez zakłóceń) |
| Zasięg lotu | 1000m |
| Scenariusze lotu | Wewnątrz / Na zewnątrz |
Specyfikacje kontrolera lotu Pixhawk 2.4.8
- Edytor: 32-bitowy ARM STM32F427 Cortex M4, 168MHz, 256KB RAM
- Czujniki:
- Żyroskop 3-osiowy L3GD20 6DOF
- LSM303D 3-osiowy 14-bitowy akcelerometr/magnetometr
- MPU6000 6-osiowy akcelerometr/magnetometr
- Barometr MS5611 o wysokiej precyzji
- Zgodność z Ground Control: QGroundControl, Planowanie misji
- Wymiary: 81mm x 47mm x 16mm; Waga: 37g
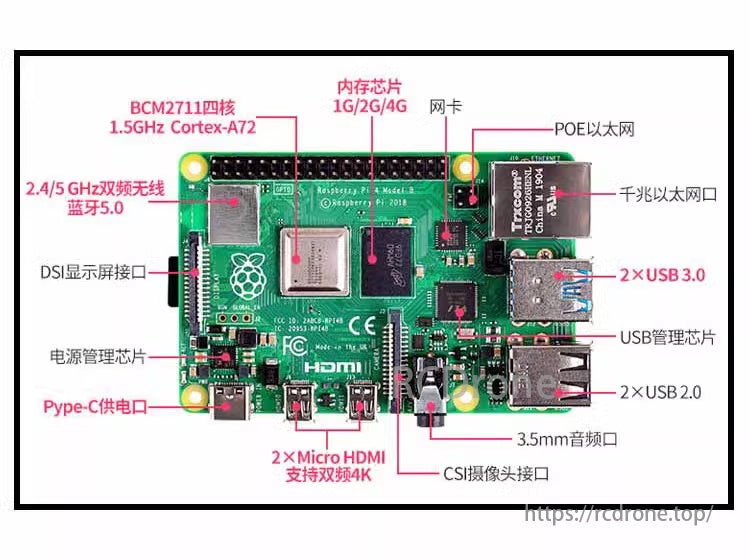
Specyfikacje Raspberry Pi 4B
- Zestaw układów scalonych:Broadcom BCM2711
- Procesor: 64-bitowy czterordzeniowy 1,5 GHz
- Procesor graficzny: 500MHz VideoCore VI
- BARAN: 4GB DDR4
- Interfejsy: 2 x USB 3.0, 2 x USB 2.0
- Wyjście wideo: Dwa porty micro HDMI, obsługuje 4K@60Hz
- Komunikacja:Bluetooth 5.0, Wi-Fi 5 (2,4/5 GHz)
- Zasilacz:USB typu C (5 V 3 A)
Zawartość pakietu
Konfiguracja 1: Silnik SunnySky A2212 z pilotem FlySky i6 i telemetrią
- Rama F450 z podwoziem
- Silniki SunnySky A2212 (4 szt.)
- Regulatory Hobbywing 20A (4 szt.)
- Śmigła samoblokujące T1045 (4 pary)
- Moduł GPS PIX M8n
- Płyta tłumiąca drgania
- Kontroler zdalnego sterowania FlySky i6
- Bateria 3S 5200mAh
- Ładowarka balansująca B3
- Mocowanie GPS
- Moduł telemetrii napięcia FS

Dołączony: Paski do akumulatorów, nylonowe opaski kablowe, podkładki drewniane, taśma klejąca 3M, brzęczyk, narzędzia instalacyjne
Filmy instruktażowe dotyczące montażu i debugowania oraz materiały powiązane są dostępne; w celu uzyskania kodu źródłowego należy skontaktować się z obsługą klienta.
Konfiguracja 2: Silnik SunnySky A2212 z Radiolink PRO
- Rama F450 z podwoziem
- Silniki SunnySky A2212 (4 szt.)
- Regulatory Hobbywing 20A (4 szt.)
- 9450 samoblokujące śmigła (3 pary)
- SZKATUŁKA.Zestaw modułów GPS M8n
- Płyta tłumiąca drgania
- Radiolink PRO (odbiornik R9DS)
- Akumulator sterujący 3S 2200mAh
- Bateria 3S 5200mAh
- Ładowarka balansująca B3
- Mocowanie GPS

Dołączony: Paski do akumulatorów, nylonowe opaski kablowe, podkładki drewniane, taśma klejąca 3M, brzęczyk, narzędzia instalacyjne
Filmy instruktażowe dotyczące montażu i debugowania oraz materiały powiązane są dostępne; w celu uzyskania kodu źródłowego należy skontaktować się z obsługą klienta.
Zestaw montażowy drona F450
Scenariusze zastosowań
Zestaw do projektowania dronów F450-4B idealnie nadaje się do:
- Badania i rozwój dronów:Badania uniwersyteckie, testowanie kontrolerów lotu, opracowywanie algorytmów.
- Inteligentne aplikacje:Planowanie ścieżki, rozpoznawanie celów i omijanie przeszkód.
- Eksperymenty edukacyjne:Programowanie, montaż sprzętu i debugowanie.
- Zastosowanie w terenie:Zawisanie w pomieszczeniach, pomiary na zewnątrz, monitorowanie rolnictwa i wiele więcej.
Bliższe dane
Platforma rozwojowa dronów F450-4B Raspberry Pi
F450 to klasyczny i powszechnie używany model drona, oferujący prosty i wygodny montaż, dobrą relację ceny do jakości, dużą praktyczność i przystosowany do szybkiego rozpoczęcia przygody z dronami.

Ulepszony Raspberry Pi 4B
Moc obliczeniowa Raspberry Pi 4B jest znacznie większa niż 3B+.
Raspberry Pi jest wyposażony w najnowszy system open-source Ubuntu 20.04, oferując płynniejsze działanie w porównaniu z systemem Ubuntu Mate.

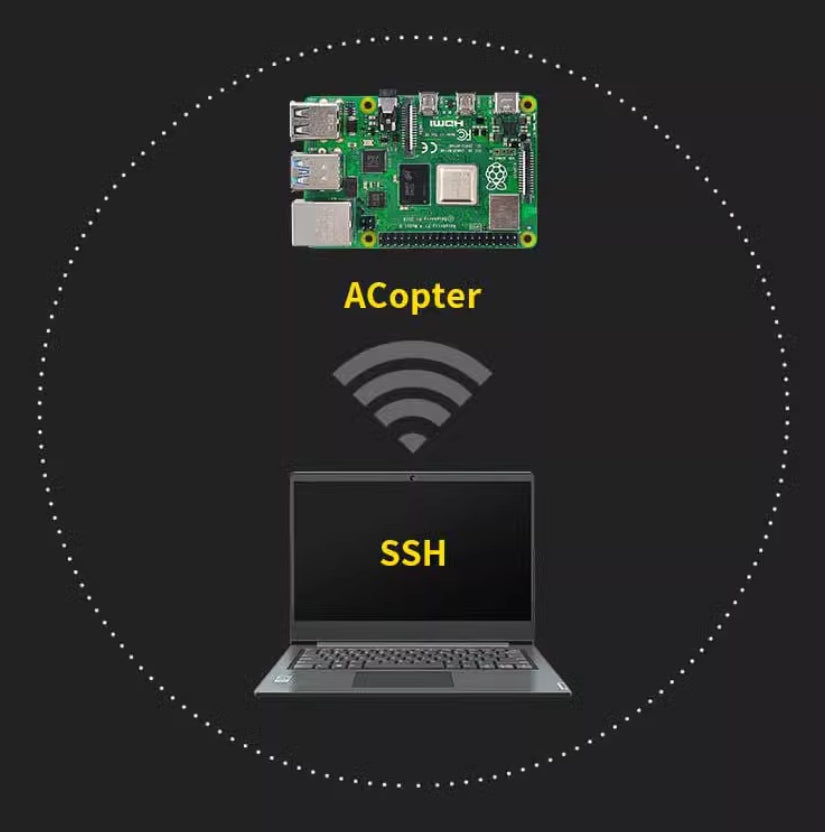
Systemowy punkt dostępu WiFi (Acopter)
Wykorzystując możliwości WiFi Raspberry Pi 4B, tworzony jest samodzielnie zbudowany hotspot (Acopter). Komputer może bezpośrednio połączyć się z hotspotem WiFi 4B, aby utworzyć sieć lokalną i używać poleceń SSH do zdalnego dostępu do Raspberry Pi. W przeciwieństwie do modelu 3B+, który wymaga routera do konfiguracji sieci, ta konfiguracja jest znacznie prostsza i bardziej przyjazna dla początkujących.
Przetwarzanie wizualne OpenCV
Dodano kamerę monokularową, umożliwiającą transmisję obrazu i postprodukcję. Strumienie wideo można przechwytywać za pomocą Raspberry Pi i przetwarzać za pomocą narzędzi takich jak OpenCV. Strumienie wideo HD w czasie rzeczywistym można również przesyłać z powrotem do komputera w celu przetworzenia lub do urządzenia mobilnego w celu oglądania.

Więcej interfejsów rozszerzeń
Raspberry Pi 4B oferuje szeroką gamę interfejsów rozszerzeń, w tym dwa porty USB 3.0, dwa porty micro HDMI 4K, interfejsy CSI i DSI, gigabitowy Ethernet i zasilacz typu C, co zapewnia wyjątkową wszechstronność w różnych zastosowaniach.
Wersja z pojedynczą kamerą
Wersja z pojedynczą kamerą obejmuje Raspberry Pi 4B i kamerę monokularową, umożliwiając komunikację przez port szeregowy z kontrolerem lotu. Obsługuje zadania takie jak przetwarzanie obrazu, programowanie Pythona i komunikacja. Ta wersja jest odpowiednia dla użytkowników z wcześniejszym doświadczeniem w korzystaniu z Pixhawk, podstawową znajomością Ubuntu (Linux), OpenCV, Raspberry Pi i komunikacji w sieci lokalnej.
Oprócz podstawowych funkcji, wersja z pojedynczą kamerą obsługuje transmisję obrazu i danych przez WiFi i umożliwia sterowanie dronem za pomocą Dronekit-python programowanie.

Pozycjonowanie przepływu optycznego
Sterowanie zawisaniem w pomieszczeniach za pomocą Dronekit-python w warunkach pozycjonowania przepływu optycznego

Ta platforma do rozwoju dronów obsługuje ROS, Programowanie w Pythonie, Rozpoznawanie obrazu OpenCV, Transmisja na duże odległości 4G, I Lądowanie z wizualnym prowadzeniem Aruco 2D, co czyni go niezwykle wszechstronnym i innowacyjnym.

Kontroler zdalnego sterowania FlySky i6
Wyposażony w odbiornik ia6b z fabrycznie wgranym 10-kanałowym oprogramowaniem układowym, moduł telemetrii napięcia i zasięg zdalnego sterowania ponad 1000 m, idealny dla początkujących do nauki i ćwiczeń.

Pilot zdalnego sterowania Radiolink AT9S
Posiada 10 kanałów z zasięgiem sterowania ponad 2000 m. Wyposażony w moduł telemetryczny, który dostarcza danych o napięciu akumulatora, liczbie satelitów GPS, wysokości lotu, współrzędnych, trybie lotu i nie tylko.

Często zadawane pytania
1. Czy mogę wykonywać rozwój wtórny? Czy mogę programować niezależnie?
Odpowiedź brzmi: tak. Jak już wcześniej wspomniano, Ardupilot jest obecnie najszerzej stosowanym systemem sterowania lotem typu open source, a wiele doskonałych krajowych i międzynarodowych modeli dronów jest opracowywanych na podstawie tego systemu.
Rozwój wtórny przebiega zasadniczo w dwóch kierunkach: rozwój sterowania lotem i ekspansja zewnętrzna.
- Rozwój sterowania lotem
Używamy Ardupilot, więc nauka tworzenia systemów sterowania lotem w oparciu o oprogramowanie typu open source polega przede wszystkim na studiowaniu projektu open source Ardupilot.
- Wymagane są dobre umiejętności programistyczne (kod źródłowy jest w języku C++), znajomość zaawansowanej matematyki (matematyka dyskretna, iteracja, linearyzacja), filtru Kalmana oraz programowania wbudowanego.
- Potrzebne są solidne podstawy teoretyczne. Przygotowuje to do pracy nad rozwojem systemów bezzałogowych i badaniami i rozwojem kontroli lotów.
Jeśli chcesz skupić się na rozwoju sterowania lotem, większość pracy musisz wykonać na swoim komputerze:
- Konfigurowanie środowiska programistycznego, pobieranie kodu źródłowego sterowania lotem, badanie jego architektury i modułów funkcjonalnych itp.
- Po zapoznaniu się z ramą kodu możesz rozpocząć programowanie w oparciu o istniejący kod.
Zacznij od podstawowego modelu sterowania lotem i skorzystaj ze wskazówek zawartych w podręczniku sterowania lotem Ardupilot, który udostępniamy.
- Rozwój ekspansji zewnętrznej
Rozszerzenie zewnętrzne umożliwia dodawanie urządzeń zewnętrznych na podstawie zadań i scenariuszy za pośrednictwem zarezerwowanych interfejsów kontrolera lotu. Na przykład:
- Dodaj moduł przepływu optycznego do pozycjonowania i zawisu wewnątrz pomieszczeń.
- Dodaj radar laserowy w celu omijania przeszkód.
- Wykorzystaj telemetrię do umożliwienia autonomicznego planowania lotów i tras.
- Zainstaluj komputer pokładowy (np. Raspberry Pi) i użyj Dronekit-Python lub ROS do zaprogramowania sterowania dronem.
Celem dodania komputera pokładowego jest obsługa bardziej złożonych zadań, takich jak:
- Wykorzystanie kamery Raspberry Pi do rozpoznawania obrazu (wymaga OpenCV, YOLO itp.).
- Łączenie protokołów komunikacyjnych w celu kontrolowania lotu drona.
- Przesyłanie danych dotyczących lotu lub filmów wysokiej rozdzielczości za pośrednictwem sieci.
Funkcji tych nie da się zrealizować, polegając wyłącznie na kontrolerze lotu.
Badanie ekspansji zewnętrznej koncentruje się głównie na zastosowaniach, co jest też kierunkiem większości konkursów w skali kraju.Po zdobyciu wiedzy możesz zapoznać się z kluczowymi obszarami inteligentnych dronów, takimi jak rozpoznawanie obrazu, integracja sztucznej inteligencji z dronami i inne.
2. Jakie są warunki niezbędne do samodzielnego rozwoju?
Nauka o dronach to stopniowy proces. Systemy dronów są interdyscyplinarne i integracyjne, obejmują szeroki zakres obszarów wiedzy. Aby nauczyć się rozwoju dronów, wymagane są następujące podstawy:
- Podstawowe umiejętności praktyczne, w tym biegła znajomość posługiwania się lutownicami, różnymi śrubokrętami i innymi narzędziami.
- Podstawowa wiedza z zakresu elektroniki: pojęcia takie jak napięcie, prąd, moc, polaryzacja i sygnały.
- Podstawowa wiedza z zakresu automatyki: regulacja PID, sprzężenie zwrotne, sygnały cyfrowe, sygnały analogowe itp.
- Podstawowe umiejętności obsługi komputera: sterowniki, porty szeregowe, prędkości transmisji, wersje oprogramowania sprzętowego, wersje oprogramowania.
- Podstawowa wiedza na temat dronów Pixhawk.
- Podstawowa znajomość systemu operacyjnego Ubuntu.
- Znajomość języków programowania, np. C++ i Python.
Jak zrobić drona Respberry PI?
Related Collections