SU17 forskningsdrönare - PX4 Industriell Drönarutveckling med öppen källkod med MID-360 LiDAR, Quad-Camera SLAM, EGO-Swarm
SU17 forskningsdrönare - PX4 Industriell Drönarutveckling med öppen källkod med MID-360 LiDAR, Quad-Camera SLAM, EGO-Swarm
RCDrone
Det gick inte att ladda hämtningstillgänglighet
Översikt
SU17 Research Drone är en högpresterande quadcopter med en 6000mAh batteri, MID-360 LiDAR för 3D-kartläggning, SLAM-system med fyrkameror för exakt lokalisering och integrerad GPS+GLONASS positionering. Med en startvikt på 2,3 kg och a lastkapacitet på 200 g, det erbjuder 21 minuters flygtid i visuellt positioneringsläge. Drivs av programvaran Prometheus, den stöder måligenkänning, vägplanering och autonom navigering, vilket gör den till en branschklassad lösning för forskning och innovation.
Hårdvaruparametrar
Flygplan
| Parameter | Beskrivning |
|---|---|
| Typ av flygplan | Quadcopter |
| Startvikt (ungefär) | 2,3 kg (med skyddskåpa och batteri) |
| Diagonalt avstånd | 320 mm |
| Mått | Längd: 442 mm, Bredd: 388 mm, Höjd: 174 mm (exklusive skyddskåpa) |
| Maximal nyttolast | 200 g |
| Svävande flygtid | Ca. 13 min (med svävning på 100 %, inte under 0 %), visuell positionering: 21 min |
| Svävande noggrannhet | GPS: Vertikal ±1,5 m, Horisontell ±2,0 m |
| 3D LiDAR SLAM: Vertikal ±0,08 m, horisontell ±0,08 m | |
| Visual SLAM med 4 kameror: Vertikal ±0,05 m, horisontell ±0,05 m | |
| Vindmotståndsnivå | Nivå 4 |
| Driftstemperatur | -10°C till 40°C |
| Huvud MCU-chip | STM32H743 |
| IMU | ICM42688/BMI088 |
| Barometer | MS5611 |
| Kompass | QMC5883L |
| Gränssnitt | USB typ-C |
Dator ombord
| Parameter | Beskrivning |
|---|---|
| Processor | Intel Core i5-8365U |
| Minneskapacitet | 8 GB |
| Minnesfrekvens | LPDDR3@2133MHz |
| Lagring | 256GB NVMe SSD |
| Nätverksport | Baidu Apollo Ethernet X2, 12V@3A power-försörjning, stöder IEEE 1588-2008 (PTP v2) |
| Seriell port | TTL seriell port X2, 5V/3.3V@500mA power utbud |
| USB | Typ-C X2 (1x USB2.0, 1x USB3.0) |
| HDMI | HDMI 1.4 |
Ström batteri
| Parameter | Beskrivning |
|---|---|
| Modell | SU17-L |
| Batterityp | Högtrycks litiumpolymerbatteri |
| Märkspänning | 26,4V (max), 21V (min) |
| Lagringsspänning | 22,8V (vanligt) |
| Nominell kapacitet | 6000mAh |
| Vikt | 680 g |
| Mått | Längd: 85,2 mm, bredd: 86.5 mm, Höjd: 135 mm |
Fjärrkontroll
| Parameter | Beskrivning |
|---|---|
| Modell | QE-2 |
| Kanaler | 8 |
| Överföringseffekt | 18~20 dBm |
| Vikt | 294,1 g |
Gimbal
| Parameter | Beskrivning |
|---|---|
| Kontrollerbar vinkel | -90° ~ 30° (lutningsaxel) |
| Streamingprotokoll | RTSP (Standard) |
| Kodningsformat | H.264 |
| Upplösning | 1080P @ 25 fps |
| Diagonal FOV (D) | 120° |
| Vertikal FOV (V) | 54° |
| Horisontell FOV (H) | 95° |
Bildöverföring
| Parameter | Beskrivning |
|---|---|
| Driftsfrekvens | 2,4 GHz |
| Överföringseffekt | 18dBm |
| Kommunikationsräckvidd | 3 km (inga störningar, inga hinder) |
| Bildomfång | 1 km (minimal störning, inga hinder) |
| Maximal bandbredd | 40 Mbps |
Fyrdubbel djupkamera
| Parameter | Beskrivning |
|---|---|
| Visionsaccelerator | Intel Movidius Myriad X VPU |
| Maximal upplösning | 1296x816 |
| Maximal bildhastighet | 1280x800 @ 120fps |
| Slutartyp | Global slutare |
| Kodningsformat | 8/10-bitars enkelström |
| FOV | 150° Diagonal FOV, 127,4° Horisontell FOV, 79,7° Vertikal FOV |
| Antal sensorer | 4 (2 fram + 2 bak) |
| IMU | BMI270 |
GNSS
| Parameter | Beskrivning |
|---|---|
| Horisontell noggrannhet | 1,5 m CEP (med SBAS) |
| Hastighetsnoggrannhet | 0,05 m/s |
| Driftläge | GPS + GLONASS + BDS + GALILEO + SBAS + QZSS |
Laddare
| Parameter | Beskrivning |
|---|---|
| Modell | LK150-2640500 |
| AC Ingångsspänning | 100V ~ 240V |
| DC-ingångsspänning | 26.4V |
| Vikt | 460 g |
| Laddningsström | 5A |
3D LiDAR
| Parameter | Beskrivning |
|---|---|
| Modell | MID-360 |
| Laser våglängd | 905 nm |
| Mätområde | 40 m @ 10 % reflektivitet |
| FOV | Horisontell 360°, Vertikal -7° ~ 52° |
| Minsta räckvidd | 0,1 m |
| Punktfrekvens | 10 Hz (vanligt) |
| Point Output | 200 000 poäng/s |
| Datagränssnitt | 100 BASE-TX Ethernet |
| Datasynkronisering | IEEE 1588-2008 (PTP v2), GPS |
| Inbyggd IMU | ICM40609 |
| Strömförsörjningsspänning | 7~27V |
| Mått | 65 mm (B) x 65 mm (D) x 60 mm (H) |
| Vikt | 115 g |
| Driftstemperatur | -20°C ~ 55°C |
Programvaruparametrar
Dator ombord
| Parameter | Beskrivning |
|---|---|
| Modell | Intel Core i5-8365U |
| System | Ubuntu 20.04 |
| Användarnamn | amov |
| Lösenord | amov |
| ROS | noetisk |
| OpenCV | 4.7.0 |
| Visuellt positioneringssystem | BSA_SLAM V1 |
Prometheus programvara
| Parameter | Beskrivning |
|---|---|
| Version | v2.0 |
| Prometheus GroundStation System | v1.24.11.27 (Slutlig version baserad på Wiki release record) |
Detaljer
SU17 Research Edition
Forskningsdrönare av branschkvalitet
- Valfri 3D LiDAR: Möjliggör kartläggning, positionering och navigering av hinder.
- Prometheus Autonomous Drone Software: Rik på demos för snabb behärskning av drönarkontroll.
- Flygplattform av branschklass: Stabil och öppen, sätter en ny standard för forskningsdrönarprestanda.

Nyckelfunktioner
SU17 Research Utvecklingsplattform för drönare (kallad SU17) antar en integrerad design som innehåller flygkontroller, omborddatorer, SLAM-moduler med fyrkameror, molnkameror och bildöverföringsmoduler för integration på hög nivå, vilket avsevärt förbättrar hårdvarans stabilitet och tillförlitlighet. Utrustad med Prometheus autonoma drönarprogramvara, stöder SU17 funktioner som måligenkänning, spårning och vägplanering för olika flygkontrollscenarier.
Den integrerar valfritt MID-360 3D LiDAR, kombinerat med FAST-LIO-algoritmen för att uppnå 3D LiDAR SLAM, och erbjuder exakt miljöavkänning och positioneringsinformation. Parat med EGO-Swarm-vägplaneringsalgoritmen möjliggör den effektiv 3D-kartläggning i realtid och undvikande av hinder i komplexa miljöer.




Programvaran Prometheus V2
Utvecklingsplattformen är byggd på ROS och Prometheus open source-ramverk, och erbjuder rika funktionaliteter och omfattande sekundära utvecklings-API:er för effektiv omprogrammering. Den ger tillgång till positioneringsinformation, flyglägen, batteristatus, IMU-data och andra drönartillstånd och sensordatagränssnitt, tillsammans med kontrollgränssnitt för position, hastighet, acceleration och attityd.
Dessutom innehåller den användningsexempel för relaterade API:er. Dessutom har drönaren säkerhetskontrollfunktioner för flygoperationer (anti-crash), vilket möjliggör automatisk nedstigning under onormala förhållanden, minskar risken för krascher och säkerställer en säkrare utvecklingsprocess.

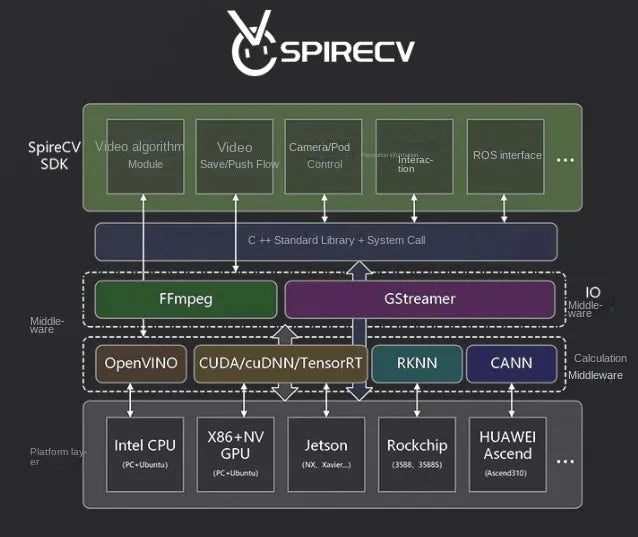
SpireCV Vision Library
SpireCV Vision Library är en bildbehandlings-SDK i realtid speciellt designad för intelligenta UAV-system. Den tillhandahåller funktioner som gimbal och kamerakontroll, videolagring och streaming, måldetektering, igenkänning och spårning.
Denna SDK syftar till att erbjuda hög prestanda, tillförlitlighet och ett strömlinjeformat gränssnitt för utvecklare av intelligenta UAV-system. Med en funktionsrik visuell bearbetningslösning gör den det möjligt för utvecklare att effektivt implementera olika komplexa visionbaserade applikationer.
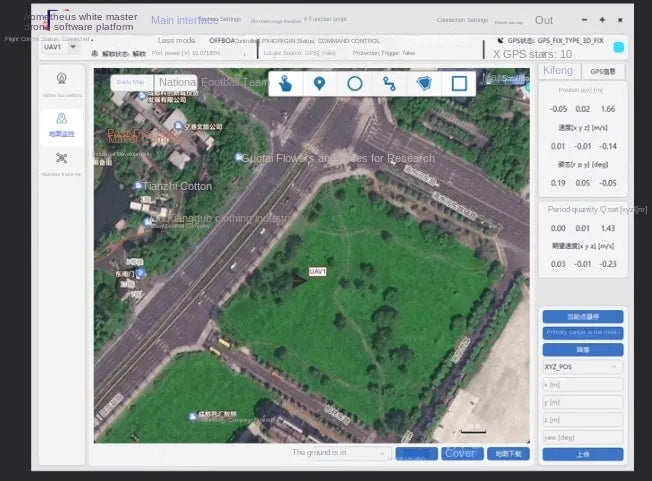
Prometheus markstation
Prometheus Ground Station är ett interaktionsgränssnitt mellan människa och drönare utvecklat baserat på Prometheus-systemet, byggt med Qt-teknik. Det möjliggör snabb replikering av funktionerna i Prometheus-systemet, ger realtidsövervakning och 3D-visualisering av drönarstatus och kontrolldata.
Genom markstationen kan användare utföra kommandon som start med ett klick, hovra vid aktuell position, landning och positionskontroll. Dessutom stöder systemet anpassade funktionsknappar för att initiera användardefinierade skript eller skicka anpassade meddelanden, vilket avsevärt förbättrar bekvämligheten, effektiviteten och skalbarheten för användaroperationer.
Kraftfull expansion
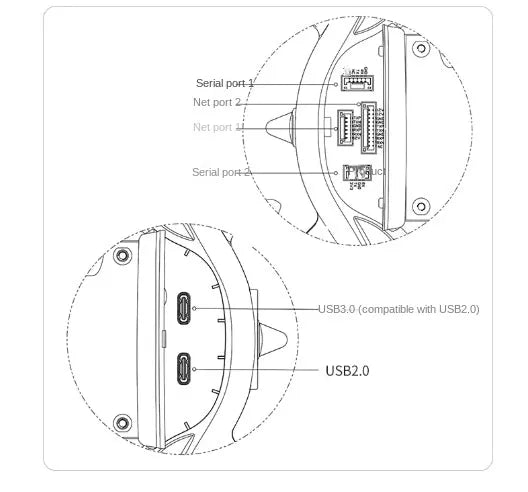
Hårdvaruexpansionsportar
-
Serieport 1
-
Serieport 2
-
Nätverksport 1
-
Nätverksport 2
-
USB-portar:
- USB 3.0 (kompatibel med USB 2.0)
- USB 2.0
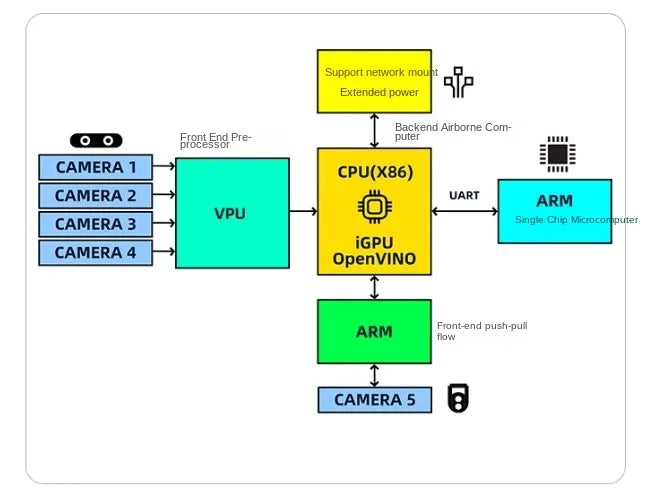
Hardware Framework
Bilden illustrerar hårdvaruarkitekturen för SU17-drönaren, och lyfter fram integrationen av olika komponenter för avancerad databehandling och systemkontroll:
-
Kameror (kamera 1-4):
Ansluten till en VPU (Vision Processing Unit) för front-end förbearbetning. -
VPU:
Hanterar visuell data från flera kameror och vidarebefordrar den till bearbetningsenheterna. -
CPU (X86) med iGPU och OpenVINO:
Fungerar som den primära beräkningsenheten för backend-bearbetning och stöder nätverksanslutna expansionsmöjligheter för förbättrad beräkningskraft. -
ARM Single-Chip mikrokontroller:
Interagerar med CPU:n via ett UART-gränssnitt för ytterligare kontrollfunktioner. -
Front-end pipelining och kamera 5:
Hanteras av en dedikerad ARM-processor för ytterligare dataströmlinjeformning.
Detta ramverk integrerar flera bearbetningsenheter, stöder bildanalys i realtid, avancerade beräkningsuppgifter och sömlös kommunikation mellan hårdvarukomponenter. Det säkerställer effektiv hantering av komplexa operationer i forsknings- och utvecklingsapplikationer.
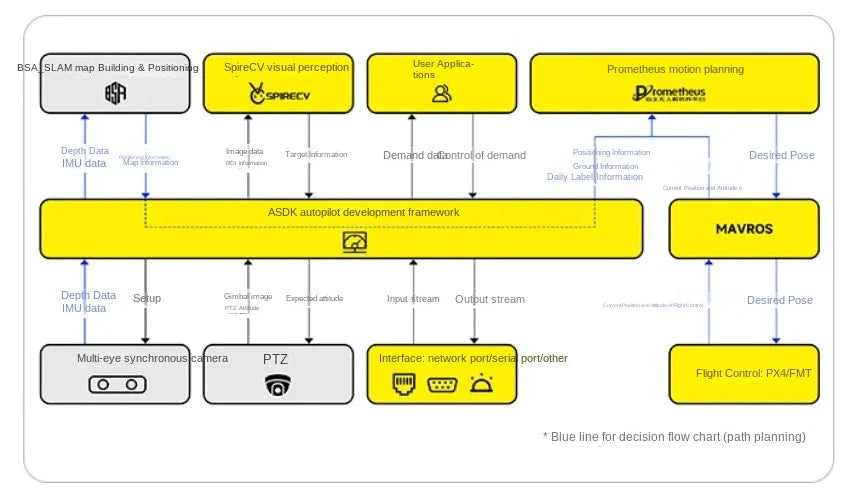
Software Framework
Diagrammet illustrerar mjukvaruarkitekturen för SU17-drönaren, och belyser integrationen av olika system för autonom funktionalitet:
-
BSA_SLAM (kartläggning och lokalisering):
- Ger rumslig kartläggning och positioneringsdata.
- Integrerar djup- och IMU-sensoringångar för exakt miljöuppfattning.
-
SpireCV Vision Perception:
- Bearbetar visuell data, inklusive objektdetektering, ROI-information och målspårning.
-
Användarapplikationer:
- Gränssnitt för användardrivna uppgifter som datavisualisering och kommandoinmatning.
-
Prometheus rörelseplanering:
- Hanterar banaplanering med hjälp av positions-, hastighets- och måldata.
-
ASDK Autonomous Driving Framework:
- Fungerar som det centrala bearbetningsskiktet, hanterar dataflödet mellan sensorer, kameror, molnmoduler och externa gränssnitt.
- Stöder flera in-/utgångskanaler (t.ex. nätverksportar, seriella portar).
-
MAVROS:
- Kommunicerar med flygkontrollsystem (PX4/FMT) för flygtillstånd och positionskontroll.
-
Molnmodul och multisynkroniseringskameror:
- Integrerar molnbaserad data för avancerad bearbetning.
- Synkroniserar visuella ingångar för högprecisionsoperationer.
Blå linjer: Representera beslutsvägar för banplanering.
Denna arkitektur visar en modulär, utbyggbar design, som möjliggör sömlös kommunikation mellan olika hårdvaru- och mjukvarukomponenter för robust drönardrift.
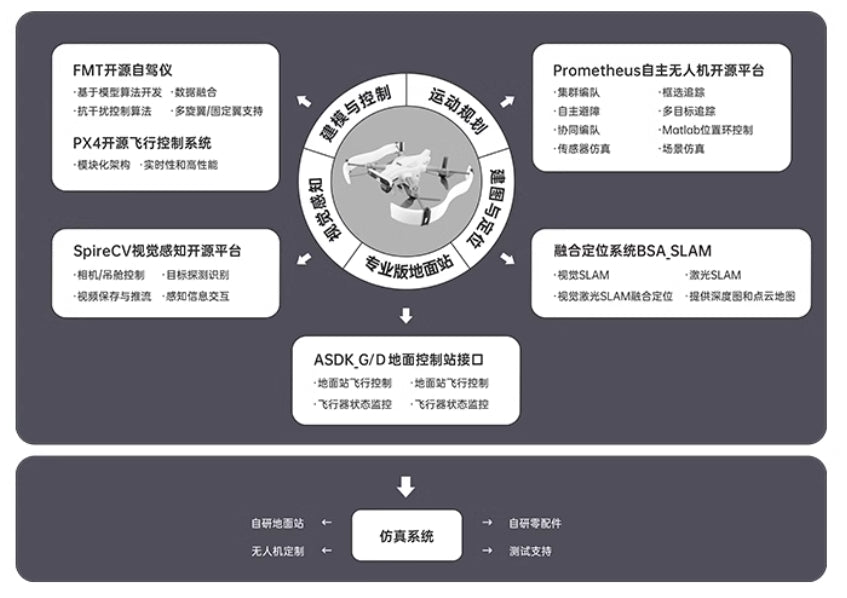
Intelligent öppenhet: Integrerad UAV-systemlösning
Diagrammet presenterar en omfattande och öppen arkitektur för drönarsystem, som betonar modularitet och integration mellan olika komponenter:
-
Kärnkomponenter:
- FMT Autopilot med öppen källkod: Ger tillförlitlig flygkontroll baserad på modulär utveckling, stöder olika miljöer och dataintegration.
- PX4 flygkontrollsystem: Säkerställer stabilitet och stöder avancerad modulär anpassning.
- SpireCV Vision Perception Platform: Fokuserar på bildbehandling, inklusive objektdetektering, spårning och videoströmning i realtid.
-
Nyckelramar:
- Prometheus autonoma UAV-plattform: Inkluderar styrning av flera drönare, rörelseplanering, samarbetsnavigering och simuleringar i den verkliga världen.
- BSA_SLAM-system: Kombinerar vision-baserad SLAM och LiDAR-baserad SLAM för exakt positionering och kartläggning.
- ASDK G/D markstationskontrollgränssnitt: Möjliggör sömlös kommunikation mellan markstationer och UAV för övervakning och realtidsjusteringar.
-
Arbetsflödesintegration:
- Belyser processer som rörelseplanering, miljökartläggning och autonom navigering.
- Integration med professionella markstationer för bankontroll, undvikande av hinder och datahantering i realtid.
-
Simuleringsstöd:
- Inkluderar ett simuleringssystem för autonoma uppdragstestning, UAV-kontroll och komponentvalidering.
Detta system visar en banbrytande lösning för autonom UAV-utveckling, med skalbara möjligheter för forskning, tillämpning och testning i olika scenarier.
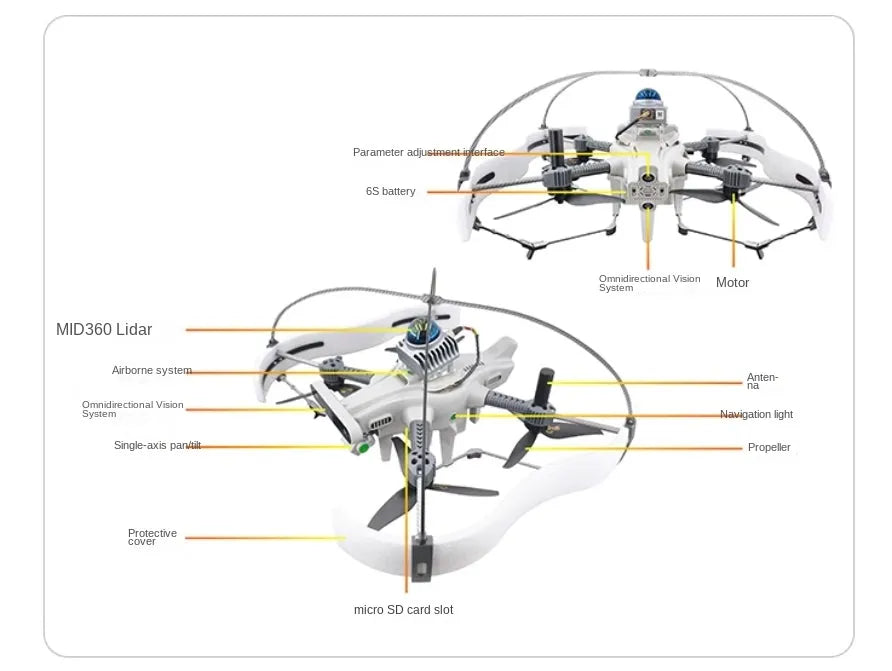
de strukturella komponenterna i forskningsdrönaren SU17, som betonar dess stabilitet och avancerade design. Nyckelfunktioner inkluderar MID360 LiDAR för exakt kartläggning, en rundstrålande synsystem för en övergripande miljöuppfattning, a enkelaxlig kardan för stabiliserad bildbehandling, och en robust 6S batteri för utökad kraft. Andra viktiga komponenter inkluderar propellersystem, antenn, navigationsljus, och en micro SD-kortplats för datalagring. Designen integrerar banbrytande hårdvara, vilket säkerställer tillförlitlighet och hög prestanda för olika forskningsapplikationer.