
Revisión de drones: Everyine Nano LR3 Drone Review
Resumen
Puntuación: 3,6
El Eachine Nano LR3 es un microcuadricóptero ultraligero de 3 pulgadas muy potente que utiliza baterías 2S. Incluye múltiples receptores externos opcionales, como FRSKY, FlySky y TBS Crossfire.
Si el sistema de seguridad GPS está configurado correctamente, el dron puede regresar a la zona de despegue de forma autónoma en caso de pérdida de señal TX. Para su tamaño y peso, la autonomía de vuelo de casi 20 minutos es realmente impresionante.
Ventajas
- Menos de 250 gramos con configuración Insta360 GO2 y 2S;
- RTH a prueba de fallos del GPS;
- Baterías LI-ION 18650 estándar;
- Excelente duración de la batería;
- Puede transportar una cámara SMO 4K, Insta360 GO2 o DJI Action 2;
Contras
- Mal documentado;
- Reparación de GPS lenta;
- El botón VTX no es accesible.
Reseña del usuario
( votos)- Relación precio/rendimiento: 3,8
- Calidad de construcción: 3.9
- Cámara, FPV y OSD: 3.9
- Rendimiento de vuelo: 3,5
- Función GPS 3.2
Análisis práctico del Eachine Nano LR3
Opté por la versión PNP (sin receptor de radio) porque quería instalar mi BetaFPV ExpressLRS Nano RX Módulo. El Eachine Nano LR3 llegó completamente ensamblado con los siguientes accesorios: dos gomas elásticas, dos juegos de hélices con tornillos y un tornillo para cámara con tuercas. Como el fabricante no incluye baterías, le pedí a Aldona Yu que me enviara un par de baterías Eachine 18650 de 2500 mAh para las pruebas.
De un vistazo
La Eachine LR3 tiene una distancia entre ejes de 144 mm y un diseño de chasis de tipo "gato muerto". Lamentablemente, solo los brazos están hechos de fibra de carbono.El resto de las piezas son de plástico. Una batería se carga desde la parte superior y la otra desde la parte inferior del dron. Cuenta con dos patines de aterrizaje impresos en 3D que protegen la batería inferior. Las baterías de iones de litio 18650 se fijan al armazón con dos bandas elásticas. Ambas baterías están conectadas en serie, lo que significa que es necesario cargarlas para encender el dron. Recuerda que el polo positivo (+) va delante y el negativo (-) detrás, en la parte superior del armazón, y viceversa, en la parte inferior. Instalar las baterías incorrectamente puede quemar los componentes electrónicos.
En la imagen de comparación a continuación, puede ver la diferencia de tamaño entre este de 3″ y el de 5″. Sector 5 V3 del HGLRCTambién hay una gran diferencia de peso entre ellos (185 g frente a 652 g con baterías).

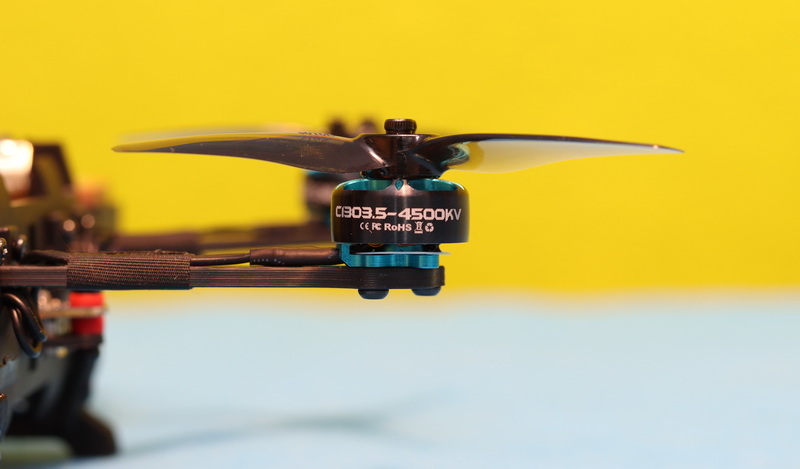
El controlador de vuelo Hglrc Zeus 5A AIO está ubicado en diagonal sobre el chasis, lo que expone dos de sus esquinas, haciéndolas más vulnerables en caso de impacto. El puerto USB y las almohadillas de soldadura RX son fácilmente accesibles sin necesidad de desmontar el dron. El módulo GPS M80 y la antena VTX de 5.8 GHz forman una cola que le da la apariencia de un escorpión. Sus motores 1303.5 de 4500 KV están equipados con hélices de 3 palas. Si prioriza el rendimiento sobre la estabilidad, puede intentar reemplazarlos por hélices de 2 palas. Los cables del motor están bien enrutados y fijados con cinta adhesiva a los brazos.
Diseñado para vuelos de largo alcance, incluye una placa VTX de alta potencia de 5.8 GHz. Según tus necesidades, puedes ajustar la potencia de transmisión entre 25, 100, 200 y 400 mW. La cámara CADDX Nano ANT está instalada en un soporte de plástico con un soporte para cámara de acción en la parte superior.

Precio y disponibilidad
Además del paquete PNP que tiene un precio de $174.78Hay combos disponibles con 5 receptores de radio diferentes (CRFS Nano V2, FlySKy FS-A8S V2, FrSky R-XSR, XM+ o R9MM OTA). El módulo de radio tiene un coste adicional de entre $10 y $30, según la versión que elijas. Recuerda pedir junto con el dron un par de baterías Eachine de 3.7 V y 2500 mAh 18650 Li-ion y un cargador compatible si no tienes uno.
Configuración inicial, preparación del vuelo
Este dron no está diseñado para pilotos principiantes. El pequeño manual de usuario incluido solo proporciona información básica sobre la configuración de pines del controlador de vuelo (diagrama de cableado) y cómo ajustar los parámetros VTX (canal y potencia). El problema es que debes tener acceso al botón del transmisor FPV para realizar todos los cambios.

Si, como yo, pediste la versión PNP, lo primero que debes hacer es instalar tu receptor de radio. El mío venía con un conector SBUS presoldado, lo que facilita el proceso. Como no incluye soporte para antena RX, opté por sujetarlos con bridas a los brazos delanteros.
Antes de instalar las hélices y cargar las baterías, debes comprobar la configuración de serie en el Configurador de BetaFlightAquí puede configurar el diseño del interruptor del transmisor deseado y realizar personalizaciones de OSD.
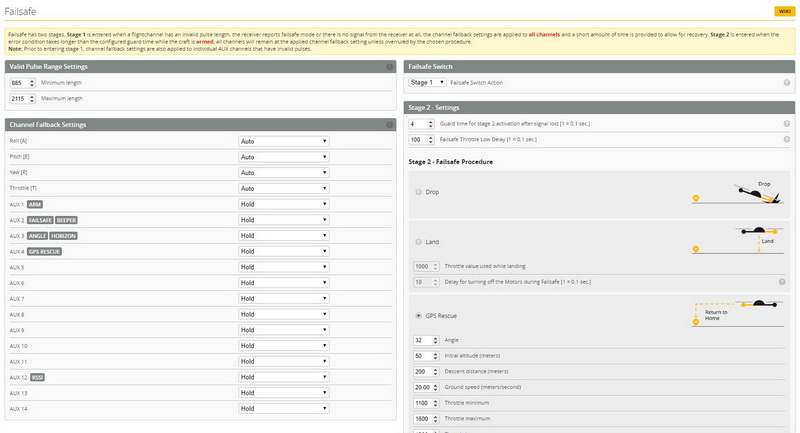
El modo de rescate GPS se puede personalizar y activar en la pestaña Failsafe (¡visible solo en el modo avanzado!). Si vuela en una zona con poca cobertura satelital, le sugiero que configure el número mínimo de satélites en 6. Aquí tiene un interruptor crucial: "Permitir armado sin corrección". Si no activa esta función, podrá armar y despegar solo después de que el punto de origen esté bloqueado. Si se encuentra en interiores, deberá activar esta opción.
Experiencia de vuelo
Primero, probé el vuelo estacionario en interiores, lo cual resultó ser una buena idea. Tras unos segundos en el aire, el OSD mostró repentinamente "RXloss" y el dron descendió.El mismo fenómeno ocurrió en cada intento. Luego, usé mi controlador Jumper T-lite y ELRS RX en lugar del LDARC EX8 y el FrSky XM+, que parece haber sido el problema.

Para despegar, necesitas acelerar al 50%, así que no esperes demasiada potencia de este pequeño, especialmente si instalas una cámara adicional. Kit de mármol dice, es como una 'ballena voladora'.
Con tantos datos de vuelo (voltajes del sistema, temperatura, coordenadas GPS, altitud de vuelo y horizonte artificial) en la pantalla FPV, parece la cabina de un avión real :)

Tarda más de 2 minutos en localizar 6 satélites en mi ubicación de vuelo. Incluso esperé 15 minutos y no se encontraron más de 11 satélites. Si bien la distancia de vuelo del GPS era precisa, la altitud no parecía ser la correcta: pasó de 5 a 180 metros sin ascender.
