MATEK F405-WTE - CONTRÔLEUR DE VOL Mateksys
MATEK F405-WTE - CONTRÔLEUR DE VOL Mateksys
MATEKSYS
Impossible de charger la disponibilité du service de retrait
MATEK F405-WTE - SPÉCIFICATIONS DU CONTRÔLEUR DE VOL Mateksys
Utilisation : Véhicules et jouets télécommandés
Âge recommandé : 12+a, 14+a
Origine : Chine continentale
Matériau : Matériau composite
Nom de la marque : MATEKSYS
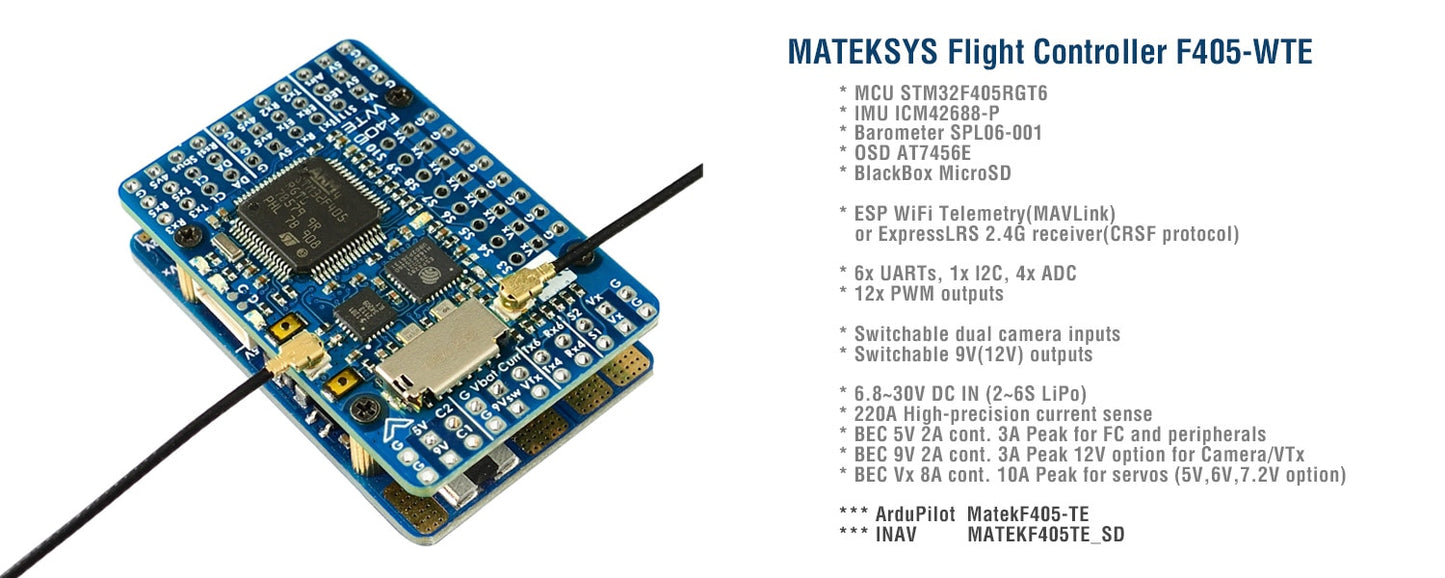
CONTRÔLEUR DE VOL F405-WTE
STM32F405RGT6, ICM42688P, SPL06, OSD, télémétrie ESP WIFI/récepteur ELRS 2,4G, 6xUART, 12x PWM, 1xI2C
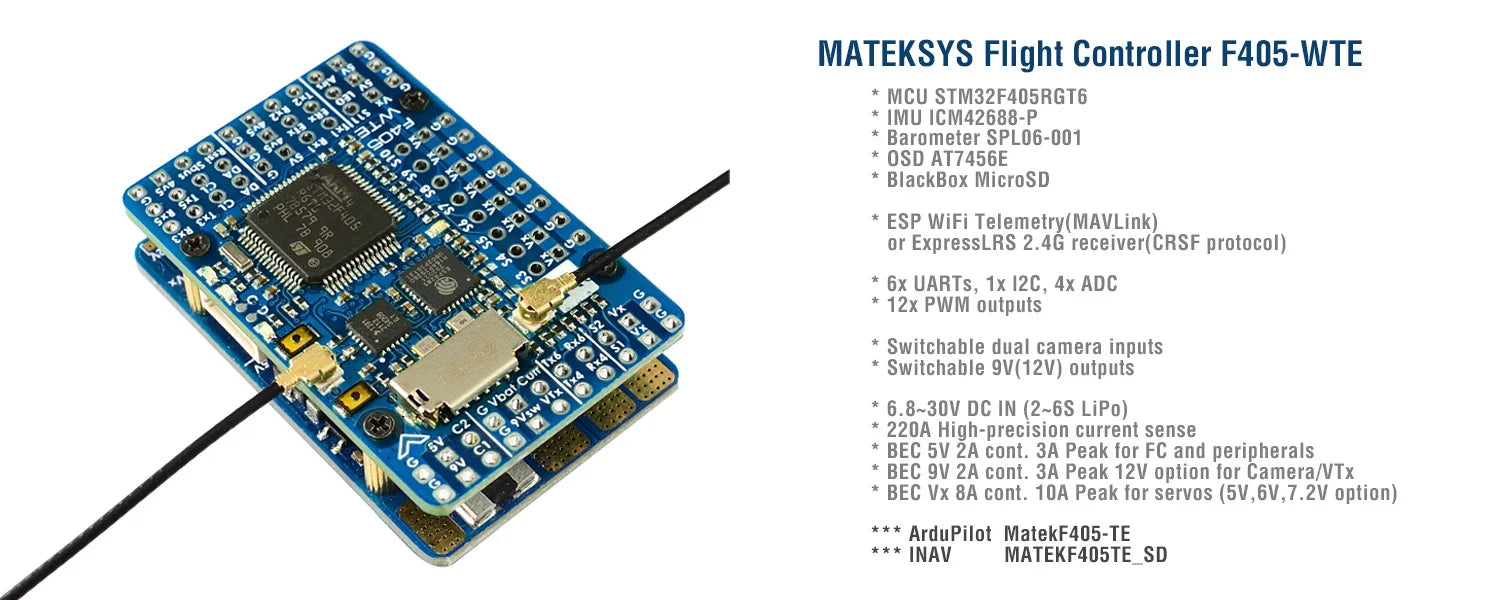
Contrôleur de vol MATEKSYS F4O5-WTE MCU STM3ZFAOSRGT6 IMU ICM42688-P Baromètre SPLO6-001 OSD AT7456E BlackBox MicroSD 2 8 2 2 2 Télémétrie WiFi ESP (MAVLink) 2 ou récepteur ExpressLRS 2.4G (protocole CRSF) 6x UARTs, Ix I2C, 4x ADC 85 12x sorties PWM Entrées double caméra commutables 4+

Spécifications FC
-
MCU : STM32F405RGT6, 168 MHz, 1 Mo de mémoire Flash
-
IMU : ICM42688-P
-
Baro : SPL06-001
-
OSD : AT7456E
-
Blackbox : emplacement pour carte MicroSD
-
Télémétrie WiFi ESP (MAVLink, 14 dBm)
-
Récepteur ExpressLRS 2,4G (protocole CRSF, télémétrie 12 dBm)
-
6 UART, 1 option Softserial_Tx (INAV)
-
12x sorties PWM
-
1x I2C
-
4x ADC (VBAT, courant, RSSI, vitesse)
-
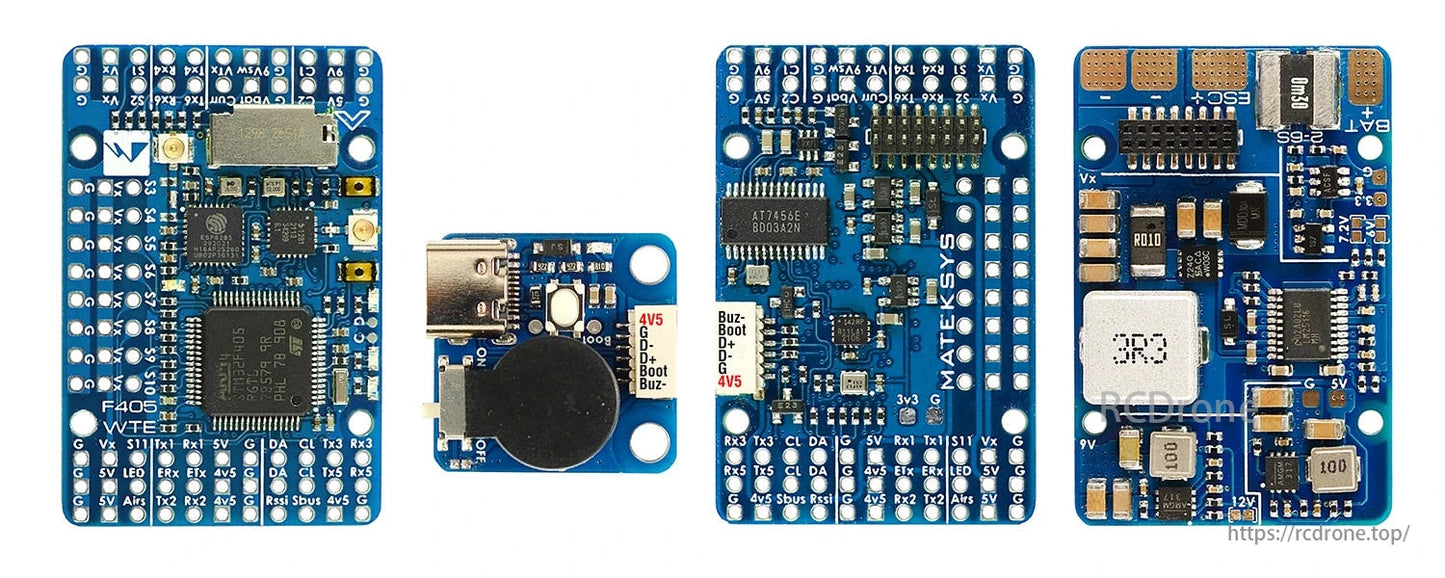
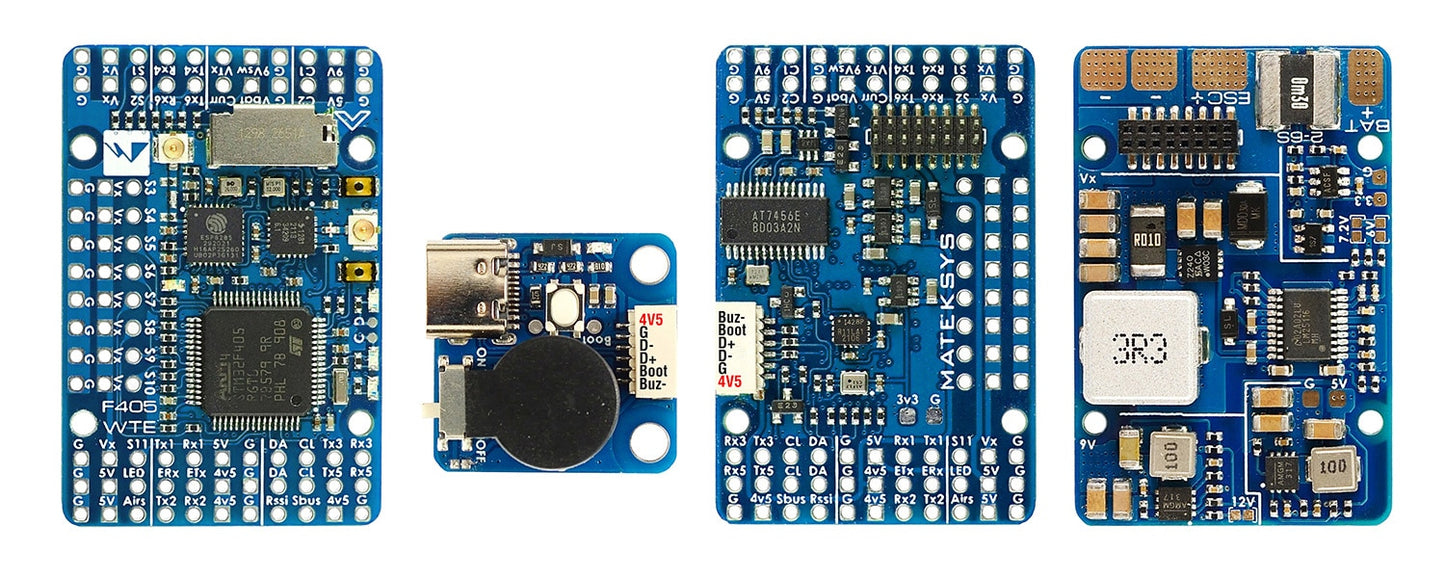
Rallonge USB/bip avec type C (USB 2.0)
-
Commutateur d'entrées double caméra
-
9 V (12 V) pour interrupteur d'alimentation VTX
Micrologiciel FC
-
ArduPilot : MatekF405-TE
-
INAV : MATEKF405TE_SD (non disponible dans le configurateur INAV 4.x)
PDB
-
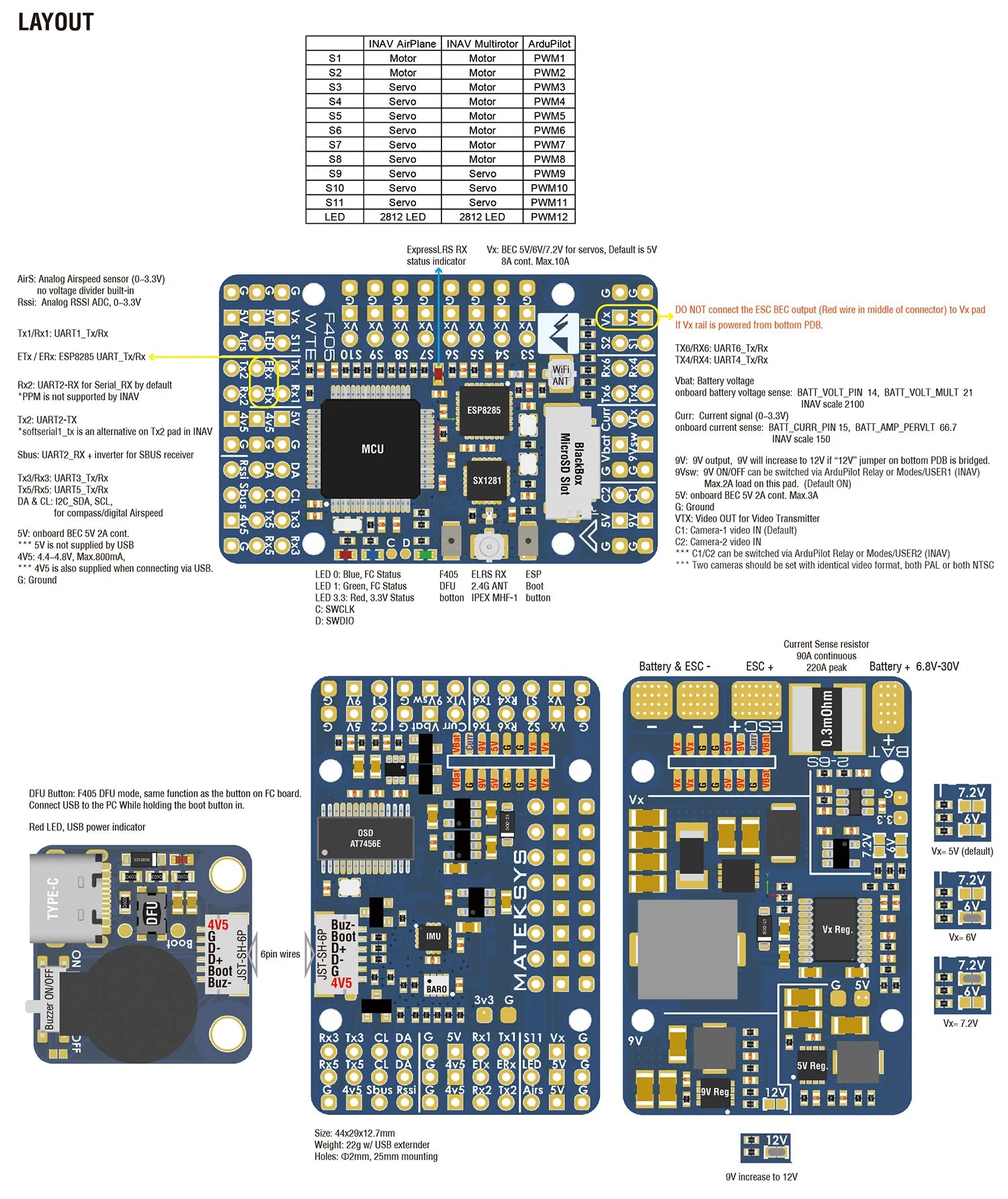
Plage de tension d'entrée : 6,8~30 V (LiPo 2~6S)
-
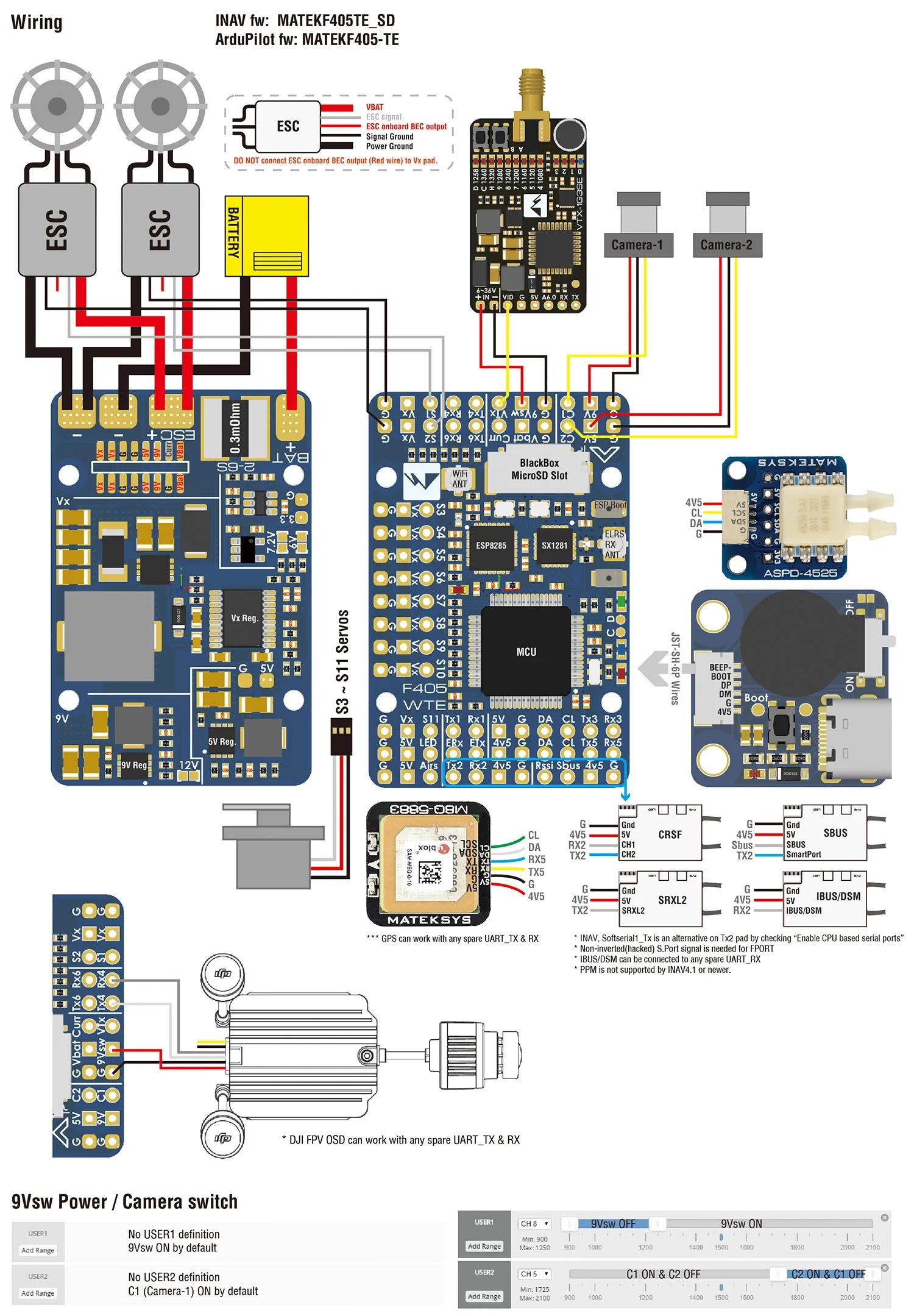
1x blocs d'alimentation ESC
-
Diviseur de tension de batterie 1 K : 20 K (échelle 2 100 dans INAV, BATT_VOLT_MULT 21,0 dans ArduPilot)
-
Capteur de courant : 220 A, 3,3 V ADC (échelle 150 en INAV, 66,7 A/V en ArduPilot)
-
Résistance de détection : 90 A en continu, 220 A en crête
Sortie BEC 5 V
-
Conçu pour le contrôleur de vol, le récepteur, l'OSD, la caméra, le buzzer, la bande LED 2812, le buzzer, le module GPS, AirSpeed
-
Courant continu : 2 A, Max.3A
Sortie BEC 9V/12V
-
Conçu pour l'émetteur vidéo, la caméra, le cardan, etc.
-
Courant continu : 2 A, max. 3 A
-
Option 12 V avec cavalier
-
pour une sortie stable de 9 V/12 V, la tension d'entrée doit > tension de sortie +1 V
Sortie BEC Vx
-
Conçu pour les servos
-
Tension réglable, 5 V par défaut, 6 V ou 7,2 V via un cavalier
-
Courant continu : 8 A, max. 10 A
-
pour une sortie Vx stable, la tension d'entrée doit > tension Vx +1 V
Sortie BEC 3,3 V
-
Conçu pour le module Baro / Compass et externe 3.Périphériques 3V
-
Régulateur linéaire
-
Courant continu : 200mA
Physique
-
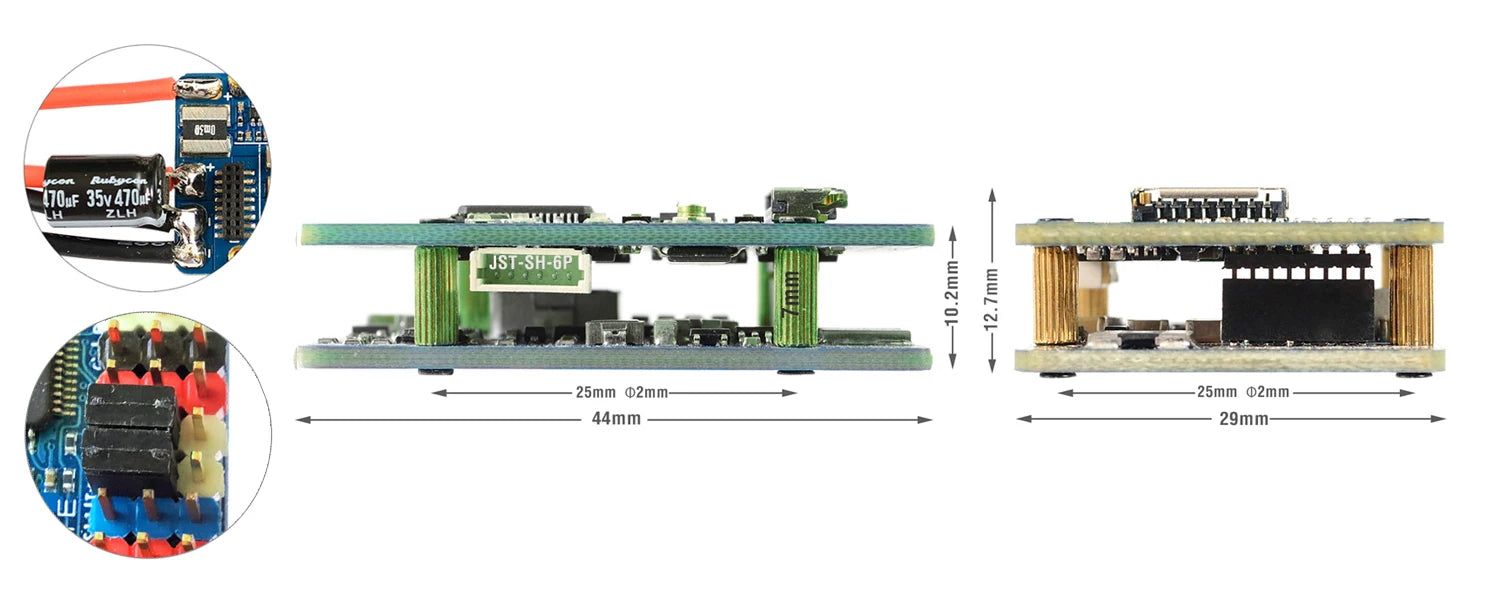
Montage : 25 x 25 mm, Φ2 mm
-
Dimensions : 44 x 29 x 12,7 mm
-
Poids : 22 g avec adaptateur USB/buzzer
Y compris
-
1x F405-WTE
-
1x rallonge USB (Type-C)/bip (buzzer passif) + câble JST-SH-6P vers JST-SH-6P de 20 cm pour rallonge USB.
-
2x antennes IPEX-MHF1 2,4G
-
1x condensateur Rubycon ZLH 35V 470uF
-
Dupont 2,54 broches (La carte est expédiée non soudée)
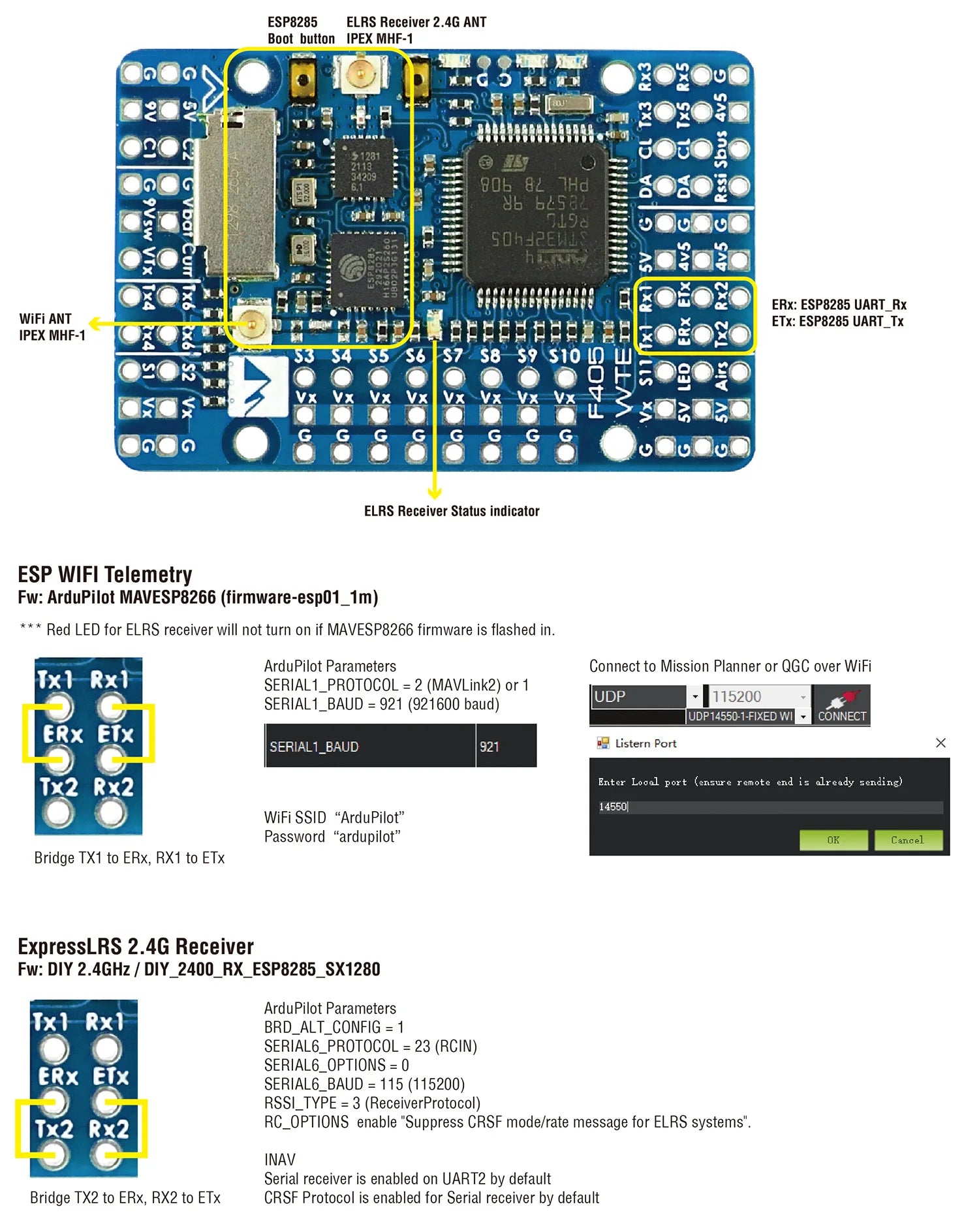
Télémétrie wifi ArduPilot ESP8266
-
https://ardupilot.org/copter/docs/common-esp8266-telemetry.html
-
Outil : ESP_NodeMCU-PyFlasher.exe
-
Micrologiciel : firmware-esp01_1m.bin
-
Clignotant avec ESP_NodeMCU-PyFlasher
-
Câblez l'ESP8285 (ETx, ERx) dans l'adaptateur USB-TTL, avec ETx sur F405-WTE connecté au Rx sur l'USB-TTL et ERx connecté au Tx de l'USB-TTL. Fil 4v5 et GND du F405-WTE vers 5V et GND de l'USB-TTL
-
Connectez l'adaptateur USB-TTL au PC tout en appuyant longuement sur le bouton de démarrage de l'ESP8285.
-
ouvrir ESP_NodeMCU-PyFlasher
-
sélectionnez Port série du module USB-TTL, chargez le micrologiciel, sélectionnez "Double sortie (DOUT)" et "Oui. efface toutes les données«
-
cliquez sur « Flash NodeMCU »
-
après le clignotement, éteignez, puis rallumez le F405-WTE via USB ou batterie.
-
Attendez quelques secondes, recherchez le SSID WiFi « ArduPilot » et le mot de passe est « ardupilot »
-
Conseils : la LED rouge du récepteur ELRS ne s'allumera pas si le micrologiciel MAVESP8266 est flashé.
-
Récepteur ExpressLRS 2,4G
-
ExpressLRS AUX1-AUX8 ne sont pas des canaux haute résolution. https://www.expresslrs.org/2.0/software/switch-config/
-
Clignotant via WiFi
-
Allumez le F405-WTE par USB, la LED du récepteur (rouge) clignotera lentement au début, et après 30 secondes, elle devrait clignoter rapidement pour indiquer qu'il est en mode point d'accès WiFi.
-
Étapes plus détaillées, veuillez vous référer cette page.
-
Cible : DIY 2,4 GHz / DIY_2400_RX_ESP8285_SX1280
-
-
Clignotant via UART
-
Câblez l'ESP8285 (ETx, ERx) dans l'adaptateur USB-TTL, avec ETx sur F405-WTE connecté au Rx sur l'USB-TTL et ERx connecté au Tx de l'USB-TTL. Câblez 4v5 et GND du F405-WTE à 5V et GND de l'USB-TTL.
-
Connectez l'adaptateur USB-TTL au PC tout en appuyant longuement sur le bouton de démarrage de l'ESP8285.
-
Sélectionnez la cible DIY 2.4 GHz / DIY_2400_RX_ESP8285_SX1280 et «
39>UART » pour la méthode Flashing, définissez votre phrase de liaison et Options du micrologiciel et une fois terminé, cliquez sur Build and Flash.
-
Connexion UDP avec le configurateur INAV via WiFi
-
Outil : ESP_NodeMCU-PyFlasher.exe
-
Micrologiciel : MSPWifiBridge_ESP-01.bin compilé sur la base de github.com/Scavanger/MSPWifiBridge
-
Clignotant avec ESP_NodeMCU-PyFlasher
-
Câblez l'ESP8285 (ETx, ERx) dans l'adaptateur USB-TTL, avec ETx sur F405-WTE connecté au Rx sur l'USB-TTL et ERx connecté au Tx de l'USB-TTL. Fil 4v5 et GND du F405-WTE vers 5V et GND de l'USB-TTL
-
Connectez l'adaptateur USB-TTL au PC tout en appuyant longuement sur le bouton de démarrage de l'ESP8285.
-
ouvrir ESP_NodeMCU-PyFlasher
-
sélectionnez Port série du module USB-TTL, chargez le micrologiciel, sélectionnez « Double sortie (DOUT) » et « Oui. efface toutes les données«
-
cliquez sur « Flash NodeMCU«
-
après le clignotement, éteignez, puis rallumez le F405-WTE par USB ou par batterie.
-
Attendez quelques secondes, recherchez le SSID WiFi « MSPWifiBridge », et le mot de passe est « 123456789 »
-
S'il n'y a pas de transfert automatique vers la page de configuration, accédez à http://192.168.4.1 manuellement. Données de connexion standard : Nom d'utilisateur : admin, Mot de passe : 123456789
-
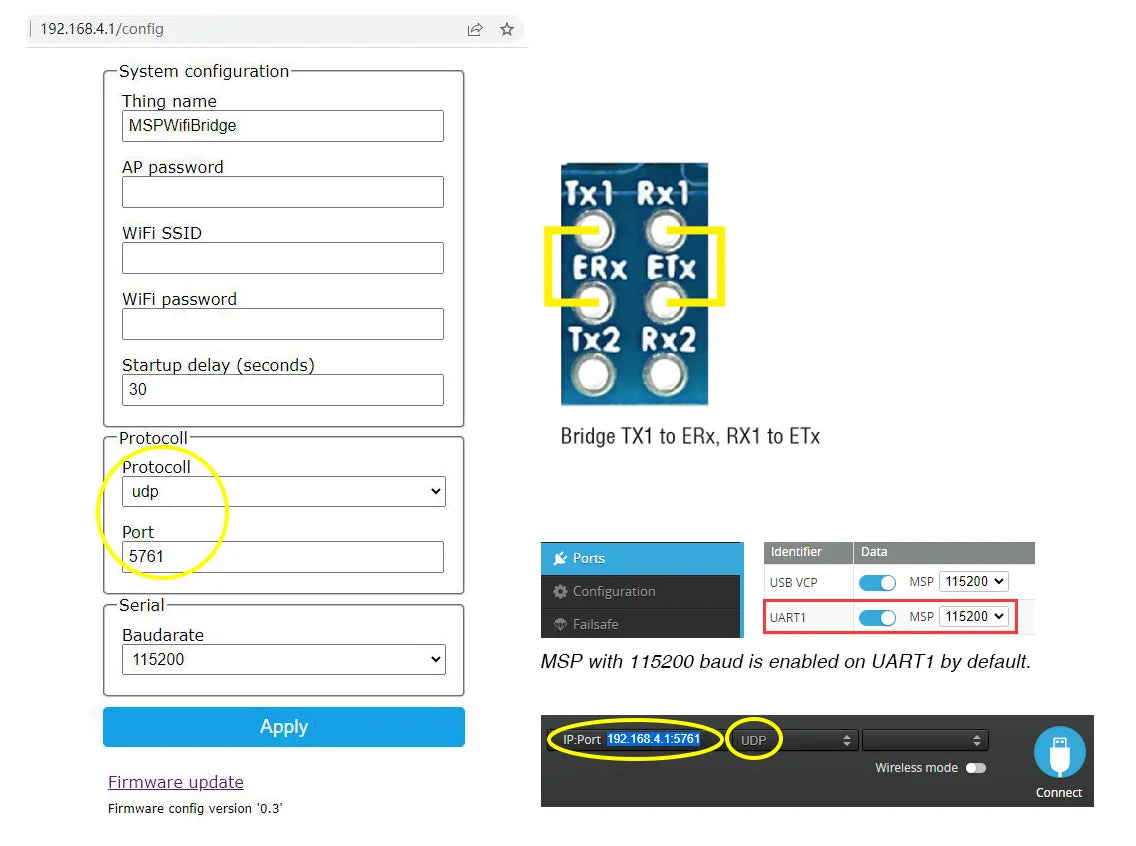
192.168.4.1/config Configuration du système Nom_objet Mot de passe du point d'accès MSPWifiBridge Ixl Rx| WiFi SSID ERx ETx Mot de passe WiFi Tx2 Rx2 Staz delay (secondes 30 Protocoll Bridge TX1 vers erx, RXI vers ETx Protocoll udp Port 5761 Ponts Identifier Data USB VC ?
Related Collections