टिप्पणी:
PIXHAWK 2.4.8 नवीनतम FMUV3 ardupilot और PX4 फर्मवेयर का समर्थन करता है।
1.आप PIXHAWK फ्लाइट कंट्रोलर के लिए सफ़ेद या काला शैल चुन सकते हैं, हार्डवेयर एक ही है। सफ़ेद शैल ज़्यादा सुंदर है। अगर आपको सफ़ेद शैल की ज़रूरत है, तो कृपया एक संदेश छोड़ें।
2.यदि पैकेज में 3DR पावर मॉड्यूल, डिफ़ॉल्ट रूप से हम XT60 प्लग 3DR पावर मॉड्यूल भेज देंगे, अगर आपको टी की जरूरत है, तो कृपया एक संदेश छोड़ दें।
3. पिक्सहॉक के पास कई पैकेज हैं। आपके चयन के अनुसार हम पैकेज भेज देंगे।
पिक्सहॉक PX4 ऑटोपायलट PIX 2.4.8 32 बिट फ्लाइट कंट्रोलर
विशेषताएँ:
पिक्सहॉक 2.4.8 नवीनतम आधिकारिक अर्दुपायलट फर्मवेयर और PX4 फर्मवेयर का समर्थन करता है।
1. उन्नत 32-बिट ARM CortexM4 उच्च-प्रदर्शन प्रोसेसर (2MB फ़्लैश), NuttX RTOS वास्तविक समय ऑपरेटिंग सिस्टम चला सकते हैं;
2. 14 पीडब्लूएम / सर्वो आउटपुट;
3. बस इंटरफ़ेस (UART, I2C, SPI, CAN);
4. एकीकृत बैकअप पावर और बैकअप नियंत्रक विफल रहता है, प्राथमिक नियंत्रक बैकअप नियंत्रण सुरक्षित है पर विफल रहता है;
5. स्वचालित और मैनुअल मोड प्रदान करें;
6. अनावश्यक पावर इनपुट और फेलओवर प्रदान करें;
7. बहुरंगी एलईडी लाइटें;
8. मल्टी-टोन बजर इंटरफ़ेस प्रदान करें
9. माइक्रो एसडी उड़ान डेटा रिकॉर्डिंग;
विशेष विवरण:
इंटरफ़ेस
1.5 उच्च वोल्टेज संगत UART 1, 2 हार्डवेयर प्रवाह नियंत्रण के साथ
2. 2 कैन
3.स्पेक्ट्रम DSM / DSM2 / DSM-X सैटेलाइट रिसीवर संगत इनपुट
4.फ़ुटाबा एसबीयूएस संगत इनपुट और आउटपुट
5.पीपीएम सिग्नल इनपुट
6.RSSI (PWM या वोल्टेज) इनपुट
7.आई2सी
8.एसपीआई
9.3.3 और 6.6VADC इनपुट
10.बाहरी माइक्रो यूएसबी इंटरफ़ेस
M9N जीपीएस मॉड्यूल
एम9एन एक जीपीएस मॉड्यूल है जिसका उपयोग सामान्यतः मानव रहित हवाई वाहनों में किया जाता है, जिसमें निम्नलिखित विशेषताएं और अनुप्रयोग होते हैं:
उच्च परिशुद्धता स्थिति निर्धारण: M9N उन्नत GNSS तकनीक को अपनाता है, कई उपग्रह नेविगेशन प्रणालियों का समर्थन करता है, और उच्च परिशुद्धता स्थिति स्थिति निर्धारण जानकारी प्रदान कर सकता है। मानव रहित हवाई वाहनों के लिए, यह सटीक स्थिति निर्धारण और नेविगेशन प्राप्त कर सकता है।
बहु-प्रणाली समर्थन: M9N बहु-उपग्रह नेविगेशन प्रणालियों का समर्थन करता है, जिसमें GPS, GLONASS, गैलीलियो, BeiDou आदि शामिल हैं। यह ड्रोन को एक साथ कई उपग्रह संकेत प्राप्त करने की अनुमति देता है, जिससे स्थिति सटीकता और विश्वसनीयता में सुधार होता है।
त्वरित स्थिति निर्धारण: एम9एन में तेज कोल्ड स्टार्ट और हॉट स्टार्ट समय है, जो शीघ्रता से उपग्रह संकेत प्राप्त कर सकता है और स्थिति निर्धारण कर सकता है, जिससे यह मानव रहित हवाई वाहनों के तीव्र उड़ान और कार्य निष्पादन के लिए महत्वपूर्ण बन जाता है।
मजबूत हस्तक्षेप-विरोधी क्षमता: M9N में उत्कृष्ट हस्तक्षेप-विरोधी प्रदर्शन है, जो जटिल विद्युत चुम्बकीय वातावरण में स्थिरता से काम कर सकता है और अन्य इलेक्ट्रॉनिक उपकरणों से हस्तक्षेप के प्रति संवेदनशील नहीं है।
ड्रोन अनुप्रयोगों में, M9N का उपयोग निम्नलिखित पहलुओं में किया जा सकता है:
स्थिति निर्धारण और नेविगेशन: एम9एन ड्रोन को सटीक नेविगेशन और उड़ान नियंत्रण प्राप्त करने में मदद करने के लिए सटीक स्थिति और गति की जानकारी प्रदान करता है।
वेपॉइंट नेविगेशन: M9N में पूर्व-निर्धारित वेपॉइंट जानकारी इनपुट करके, मानव रहित हवाई वाहन स्वचालित रूप से मार्ग के अनुसार उड़ान भर सकते हैं, जिससे स्वायत्त वेपॉइंट नेविगेशन कार्य प्राप्त हो सकते हैं।
बहु विमान सहयोग: कई ड्रोन टीम सहयोगी उड़ान और गठन उड़ान जैसे अनुप्रयोगों को प्राप्त करने के लिए स्थिति निर्धारण और समन्वयन के लिए M9N मॉड्यूल का उपयोग कर सकते हैं।
वापसी से वापसी: एम9एन सटीक वापसी स्थिति संबंधी जानकारी प्रदान कर सकता है, जिससे ड्रोन सुरक्षित रूप से उड़ान बिंदु या पूर्व निर्धारित वापसी बिंदु पर वापस लौट सकता है।
एम9एन अधिक सटीकता, तीव्र खोज गति और बेहतर स्थिरता के साथ अधिक उपग्रहों की खोज कर सकता है। (तारों की खोज की विशिष्ट संख्या उस समय के वातावरण द्वारा निर्धारित की जाती है।)
पिक्सहॉक PX4 M9N GPS के साथ विवरण
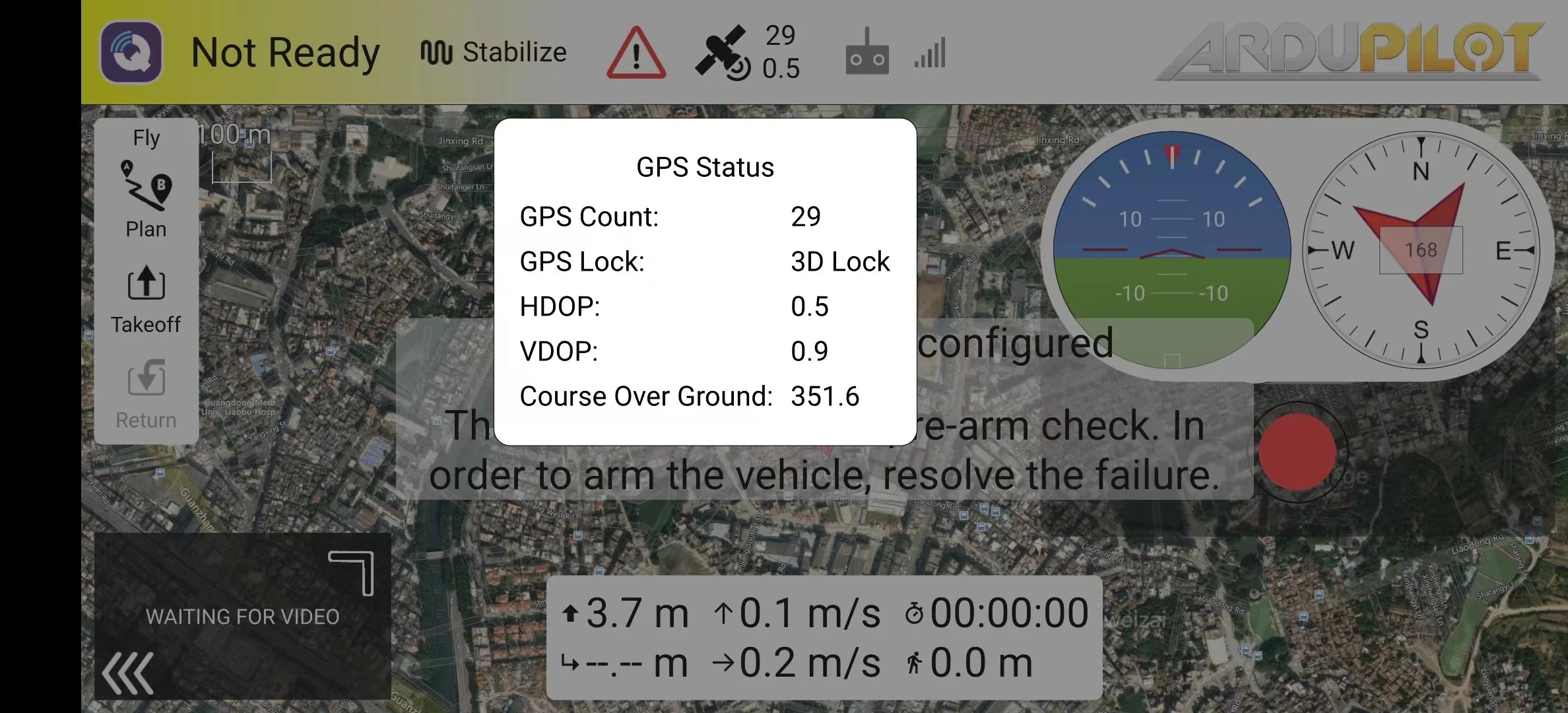
ऑटोपायलट के लिए तैयार नहीं है। 2.5 ARDUINO फ्लाई रोड लिंक्सिंग रोड GPS स्थिति को स्थिर करें: शुइतांगशान, Lr GPS गणना: 29/10/10 प्लान W-168। GPS लॉक: 3D लॉक 10 डिग्री। HDOP: 0.5। टेकऑफ़ VDOP: 0.9। गुआंग्डोंग मील में नेविगेशन के लिए कॉन्फ़िगर किया गया। ग्राउंड पर कोर्स: 351.6। यूनिवर्सिटी लियाओबू अस्पताल वापसी का रास्ता, जाँच: वीडियो का इंतज़ार। वाहन को हथियारबंद करने का लक्ष्य, विफलता को हल करना।