







फ़ीटेक STS3215 - 7.4V 20KG 360° 25T चुंबकीय एनकोडर सीरियल बस सर्वो मल्टी टर्न सर्वो उच्च परिशुद्धता चरण मोड सर्वो
फ़ीटेक STS3215 - 7.4V 20KG 360° 25T चुंबकीय एनकोडर सीरियल बस सर्वो मल्टी टर्न सर्वो उच्च परिशुद्धता चरण मोड सर्वो
Feetech
पिकअप उपलब्धता लोड नहीं की जा सकी
फ़ीटेक STS3215 - 7.4V 20KG 360° सर्वो विनिर्देश
ब्रांड नाम: फीटेक
उत्पत्ति: मुख्यभूमि चीन
सामग्री: प्लास्टिक
प्लास्टिक प्रकार: पीसी
RC पार्ट्स और Accs: बैटरी - LiPo
आकार: 10*10*10
वाहन प्रकार के लिए: कारें
उपयोग: वाहन और रिमोट कंट्रोल खिलौने
पुर्ज़े/सहायक उपकरण अपग्रेड करें: लिथियम बैटरी
रिमोट कंट्रोल पेरिफेरल्स/डिवाइस: रिमोट कंट्रोलर
उपकरण आपूर्ति: बैटरी
मात्रा: 1 पीसी
तकनीकी पैरामीटर: KV1100
मॉडल संख्या: STS3215
चार-पहिया ड्राइव विशेषताएँ: मोटर्स
व्हीलबेस: स्क्रू
मॉडल संख्या: STS3215
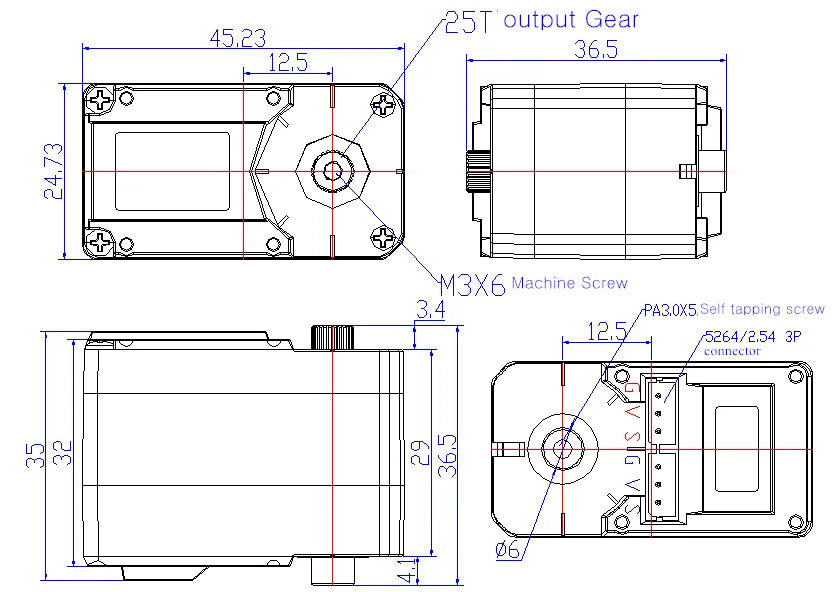
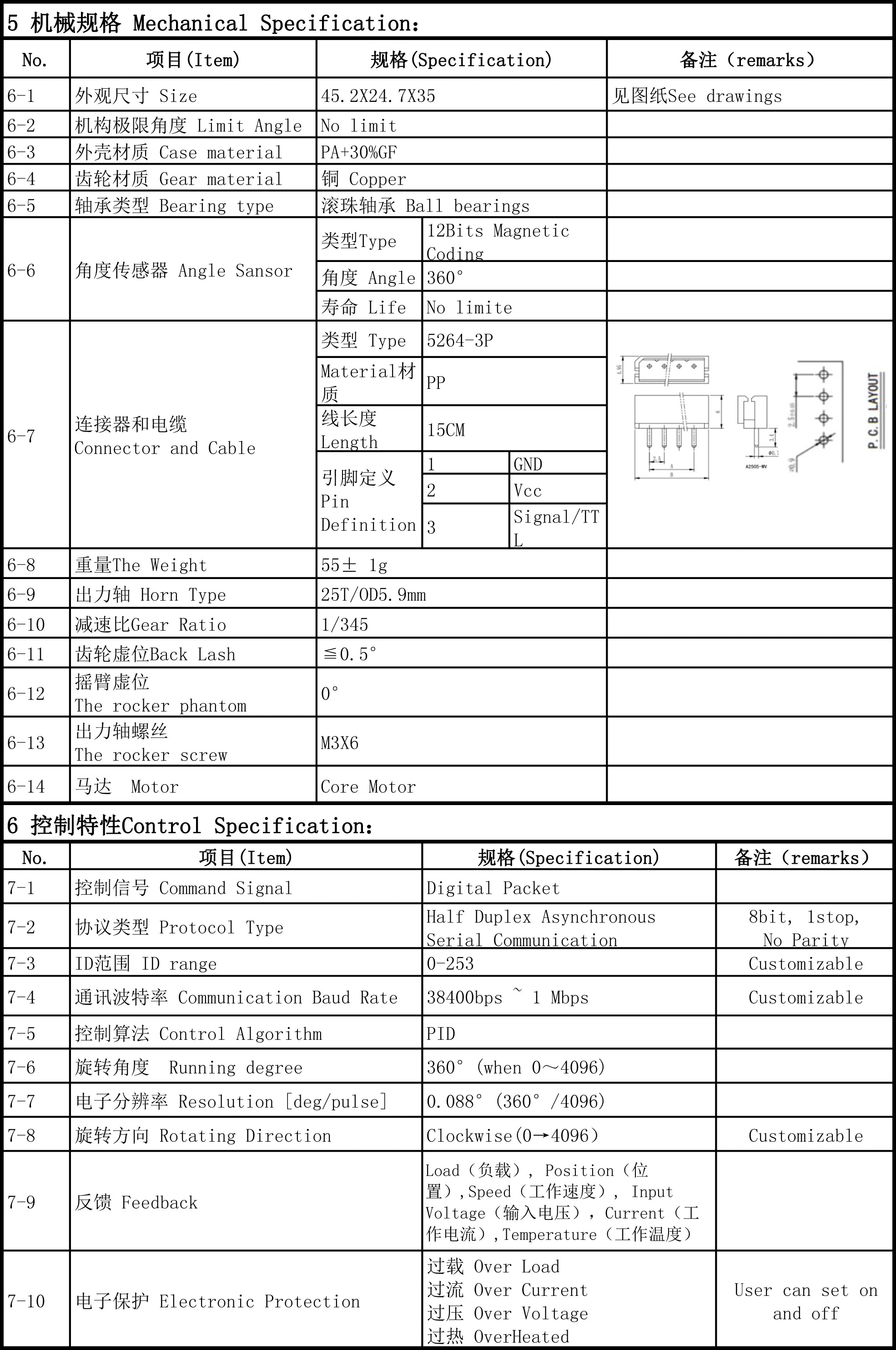
आकार: 45.2 एक्स 24.7 X 35mm
वजन: 55± 1 ग्राम
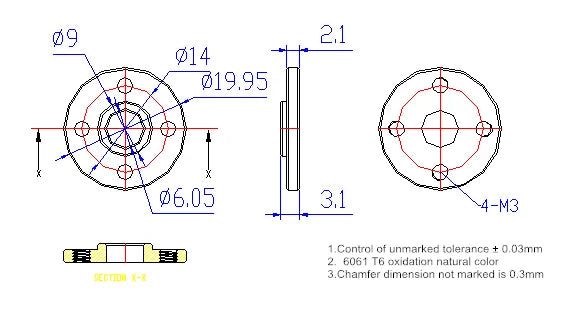
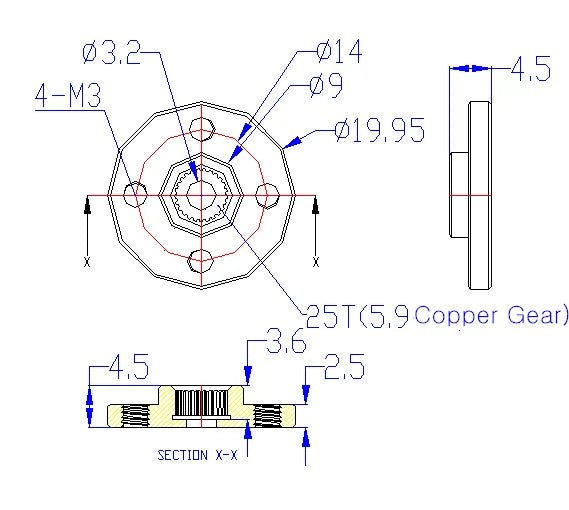
गियर प्रकार: तांबा
सीमा कोण: कोई सीमा नहीं
बेयरिंग: बॉल बेयरिंग
हॉर्न गियर स्प्लाइन: 25T
मोटर: कोरलेस मोटर
ऑपरेटिंग वोल्टेज रेंज: 6-7.4V
पीक स्टॉल टॉर्क: 19.5 किग्रा.सेमी@6V
रेटेड टॉर्क: 6.5 किग्रा.सेमी@6V
प्रोटोकॉल प्रकार: हाफ डुप्लेक्स एसिंक्रोनस सीरियल कम्युनिकेशन
|
उत्पाद का नाम
|
फ़ीटेक 2020 नया उत्पाद STS3215मैग्नेटिक एनकोडर 360° सीरियल बस सर्वो मूल्यांकन
|
|
आकार
|
45.2X24.7X35मिमी
|
|
वजन
|
55± 1 ग्राम
|
|
स्टॉल टॉर्क
|
19.5 किग्रा.सेमी@7.4V
|
|
स्टॉल स्पीड
|
52आरपीएम@7.4V
|
|
प्रतिक्रिया
|
भार/स्थिति/गति/वोल्टेज/वर्तमान/तापमान
|
|
इलेक्ट्रॉनिक सुरक्षा
|
अति ताप/अतिधारा/ओवरवोल्टेज/अधिभार संरक्षण
|
|
ODM और OEM में विशेषज्ञता
|
Y
|
|
जीवन परीक्षण
|
>1000000
|
|
मोटर शोर
|
45±5dB
|
|
स्टीयरिंग गियर शोर
|
60±5dB
|
|
जलरोधी प्रदर्शन
|
नहीं
|
|
प्रोटोकॉल प्रकार
|
हाफ डुप्लेक्स एसिंक्रोनस सीरियल कम्युनिकेशन
|
-
संरचनात्मक विशेषताएं:
-
शेल उच्च शक्ति के साथ इंजीनियरिंग प्लास्टिक शेल को अपनाता है, केंद्र की दूरी को अनुकूलित करता है, अधिक कॉम्पैक्ट समग्र संरचना, सर्वो गियर 1:345 कॉपर गियर संयोजन, उच्च टॉर्क, एक ही टॉर्क पर, मानक सर्वो के साथ तुलना को अपनाता है। आकार, यह निचला प्रोफ़ाइल दिखता है (5 मिमी), शरीर डबल अक्ष संरचना डिज़ाइन को अपनाता है, सर्कल लाइनेड ठोस की संरचनात्मक विशेषताएं, धातु प्रिंसिपल डिप्टी सर्वो हॉर्न के साथ डबल आउटगोइंग केबल्स की वायरिंग मोड, यह चौगुनी रोबोट, सांप में आवेदन के लिए उपयुक्त है रोबोट, डेस्कटॉप रोबोट, ह्यूमनॉइड रोबोट और मैकेनिकल आर्म।

2.सर्वो वायर
3.पैकिंग: पीई बैग, कलर बॉक्स, प्लास्टिक बॉक्स आपके लोगो के साथ
4.केबल कनेक्टर
5.वाइड वर्किंग वोल्टेज सर्वो के अनुकूलित विभिन्न
1.एक्सेलेरेशन स्टार्ट स्टॉप फ़ंक्शन: गति और त्वरण मान सेट किया जा सकता है, गति प्रभाव अधिक सौम्य है।
2.उच्च परिशुद्धता, 360 डिग्री पूर्ण स्थिति 4096 बिट परिशुद्धता, उच्चतम स्थिति रिज़ॉल्यूशन 0 है।088 डिग्री, यदि नियंत्रण 90 डिग्री है, तो इनपुट 4096/360 * 90 = 1024, यदि नियंत्रण 180 डिग्री है, तो इनपुट 4096/360 * 180 = 2048, ताकि गणना की जा सके।
3.चार कार्यशील मोड स्विचिंग हैं (मोड 0 पोजीशन सर्वो, मोड 1 स्पीड क्लोज्ड-लूप, मोड 2 स्पीड ओपन-लूप, मोड 3 स्टेप सर्वो)।
1)、मोड 0:स्थान मोड, डिफ़ॉल्ट मोड। इस मोड में, 360 डिग्री पूर्ण कोण नियंत्रण का एहसास किया जा सकता है। त्वरण आंदोलन का समर्थन करें।
2)、मोड 1: स्पीड क्लोज्ड-लूप, प्रोग्रामिंग इंटरफ़ेस में, ऑपरेशन मोड 1 पर सेट है, स्पीड क्लोज्ड-लूप मोड पर स्विच करें, और चलाने के लिए स्पीड कॉलम में संबंधित गति दर्ज करें।
3)、मोड 2: स्पीड ओपन-लूप, प्रोग्रामिंग इंटरफ़ेस में, ऑपरेशन मोड 2 पर सेट है, स्पीड ओपन-लूप मोड पर स्विच करें, और चलाने के लिए समय कॉलम में संबंधित समय दर्ज करें।
4)、मोड3:स्टेप मोड: प्रोग्रामिंग इंटरफ़ेस में, अधिकतम/न्यूनतम कोण सीमा 0 पर सेट है, और ऑपरेशन मोड 3 पर सेट है। स्टेप मोड पर स्विच करें. लक्ष्य स्थिति की ओर कदम बढ़ाने के लिए स्थिति पट्टी में स्थिति दर्ज करें। उसी दिशा में आगे बढ़ना जारी रखने के लिए स्थिति पर फिर से क्लिक करें।
4、मल्टी टर्न मोड, 360 डिग्री पूर्ण नियंत्रण और फीडबैक, उच्चतम सटीकता के तहत, पूर्ण स्थिति नियंत्रण प्लस या माइनस 7 मोड़ हो सकता है, लेकिन पावर चक्रों की संख्या सहेजी नहीं जाती है, केवल पूर्ण स्थिति होती है फीडबैक मूल्य बरकरार रखा गया है।
5、एक कुंजी अंशांकन, किसी भी स्थिति में 360 डिग्री कोण स्थापना, (40 (दशमलव) पता इनपुट 128 (दशमलव)) एक कुंजी सुधार वर्तमान स्थिति मध्य (2048 (दशमलव)) है।
6、टीटीएल संचार स्तर, आधा डुप्लेक्स एसिंक्रोनस संचार, पढ़ने और लिखने के मापदंडों को समायोजित करने के लिए बस प्रोटोकॉल समर्थन, और सिंक्रोनस रीड फ़ंक्शन जोड़ें (बदले में बस में प्रत्येक सर्वो से रीड बैक निर्देश प्राप्त करने के लिए एक निर्देश भेजें) .)
7、एकाधिक सुरक्षा, (ओवरलोड, ओवरकरंट, ओवरवॉल्टेज, ओवरहीटिंग, स्विच सेटिंग, कंडीशन पैरामीटर बदलना)
1)、ओवरलोड सुरक्षा: स्थिति का पता लगाने के माध्यम से, शुरुआत से आंदोलन के दौरान लक्ष्य स्थिति की स्थिति, जब बाधाओं के अवरोध का सामना करने के बाद वर्तमान स्थिति को लक्ष्य स्थिति नहीं पाया जाता है, तो अनलोडिंग बल 2S (डिफ़ॉल्ट अवरोधक बल का 20%) तक रहता है। जब तक कोई नया कमांड ट्रिगर न हो जाए, रिलीज प्रोटेक्शन
2)、ओवरकरंट प्रोटेक्शन: सेट करंट वैल्यू के माध्यम से, जांचें कि करंट सेट करंट वैल्यू तक पहुंचता है या नहीं। जब यह निर्धारित वर्तमान मान तक पहुंच जाए, तो बल छोड़ दें (डिफ़ॉल्ट टॉर्क 0 है)। जब तक कोई नया कमांड ट्रिगर न हो जाए, रिलीज़ सुरक्षा
3)、ओवर वोल्टेज सुरक्षा: वर्तमान वोल्टेज मान का पता लगाएं। यदि यह निर्धारित वोल्टेज मान से अधिक है, तो अलार्म ओवर-वोल्टेज प्रदर्शित करेगा।
4)、अति ताप संरक्षण: वर्तमान मोटर तापमान का पता लगाएं। यदि तापमान निर्धारित मूल्य से अधिक हो जाता है, तो अलार्म ओवरहीट प्रदर्शित करेगा।
8:मल्टीपल फीडबैक:
1)लोड फीडबैक: वर्तमान नियंत्रण आउटपुट मोटर के वोल्टेज कर्तव्य चक्र को चलाता है, और पूर्ण स्केल 1000 = 100% टॉर्क आउटपुट है।
2)वर्तमान प्रतिक्रिया: सर्वो कार्यशील धारा, 1 = 6।5mA
3)वोल्टेज फीडबैक: सर्वो कार्यशील वोल्टेज, 70=7V,0।1V
4)तापमान फीडबैक: वर्तमान सर्वो का आंतरिक कार्य तापमान (तापमान मापना)。
5)स्पीड फीडबैक: वर्तमान मोटर रोटेशन की गति, और यूनिट समय में चरणों की संख्या (प्रति सेकंड)
9、पीआईडी पैरामीटर खोलें।





Related Collections







