


MATEK Mateksys EXPRESSLRSELRS 2.4GHZ VARIO 受信機
MATEK Mateksys EXPRESSLRSELRS 2.4GHZ VARIO 受信機
MATEKSYS
受取状況を読み込めませんでした
MATEK Mateksys EXPRESSLRSELRS 2.4GHZ VARIO レシーバー仕様
使用: 乗り物とリモコンのおもちゃ
推奨年齢: 12 歳以上、14 歳以上、3 ~ 6 歳、6 ~ 12 歳、0 ~ 3 歳
原産地: 中国本土
材質: 複合材料
ブランド名: MATEKSYS
EXPRESSLRS/ELRS 2.4GHZ VARIO レシーバー
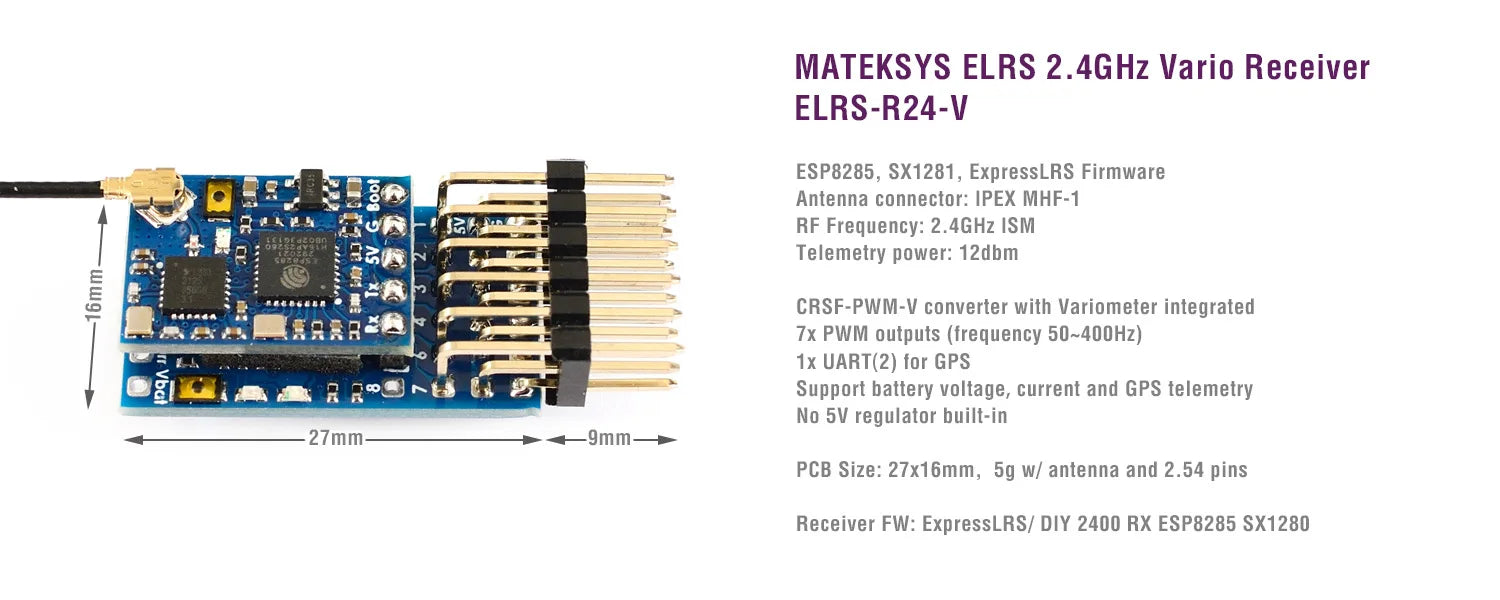
ExpressLRS ファームウェア、2.4 GHz、7x PWM 出力、バリオメーター センサー内蔵。
バロ「ALT」の読み上げ
-
EdgeTX 2.7.1/OpenTX 2.3.15 および ExpressLRS 2.5 以降、Baro Alt テレメトリ ID が CRSF プロトコルでサポートされています。
-
送信機、ExpressLRS TX モジュール、受信機をすべて最新バージョンに更新する必要があります。
-
CRSF-PWM-V を V2.3.0 以降に更新します。 http://www.mateksys.com/?portfolio=crsf-pwm#tab-id-6

-
グライダーおよびその他の固定翼に特化。フォームファクターが小さく、DLG や高性能スローパーなどのペイロードベイが制限されているグライダーに取り付けることができます。追加の高度計/バリオメーターを取り付ける必要がないため、スペースと重量も節約されます。
-
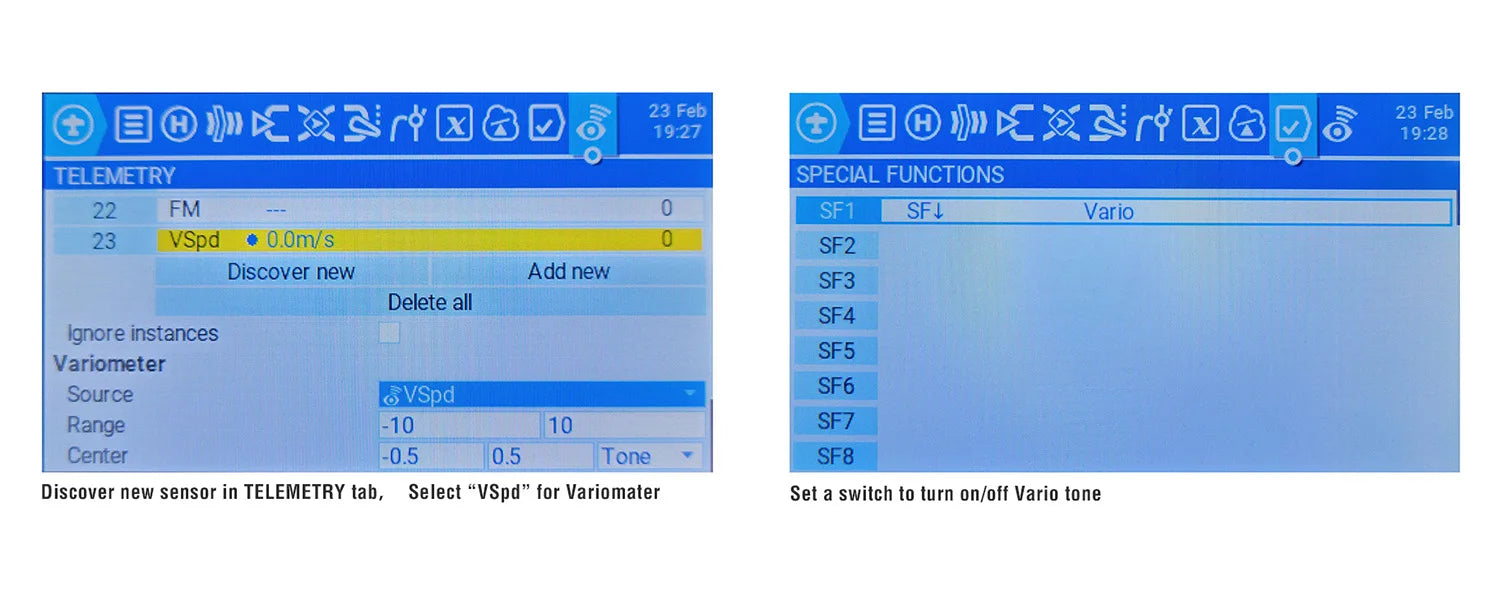
内蔵気圧計により、垂直速度テレメトリが提供されます。バリオメーターは上昇音と下降音の両方を鳴らすため、送信機を見なくても上昇中か沈下中かを知ることができます。
-
ExpressLRS ファームウェアと CRSF プロトコルを使用すると、バッテリー電圧、電流、GPS 関連などの他の遠隔測定データも得られます。
仕様
-
ESP8285、SX1281、ExpressLRS ファームウェア
-
RF 周波数: 2.4GHz ISM (2400~2480MHz)
-
アンテナコネクタ: IPEX MHF-1
-
テレメトリ出力: 12dbm
-
気圧計内蔵の CRSF-PWM-V コンバータ
-
7x PWM 出力 (6x 電源レール付き、PWM8 は単なる信号パッド)
-
PWM 周波数: 50、100、160、330、400Hz 設定可能
-
PWM 分解能: 4x 1024 ポジション + 3x 128 ポジション (ExpressLRS 2.0 Wide スイッチ モード)
-
GPS 用の 1x UART(2)
-
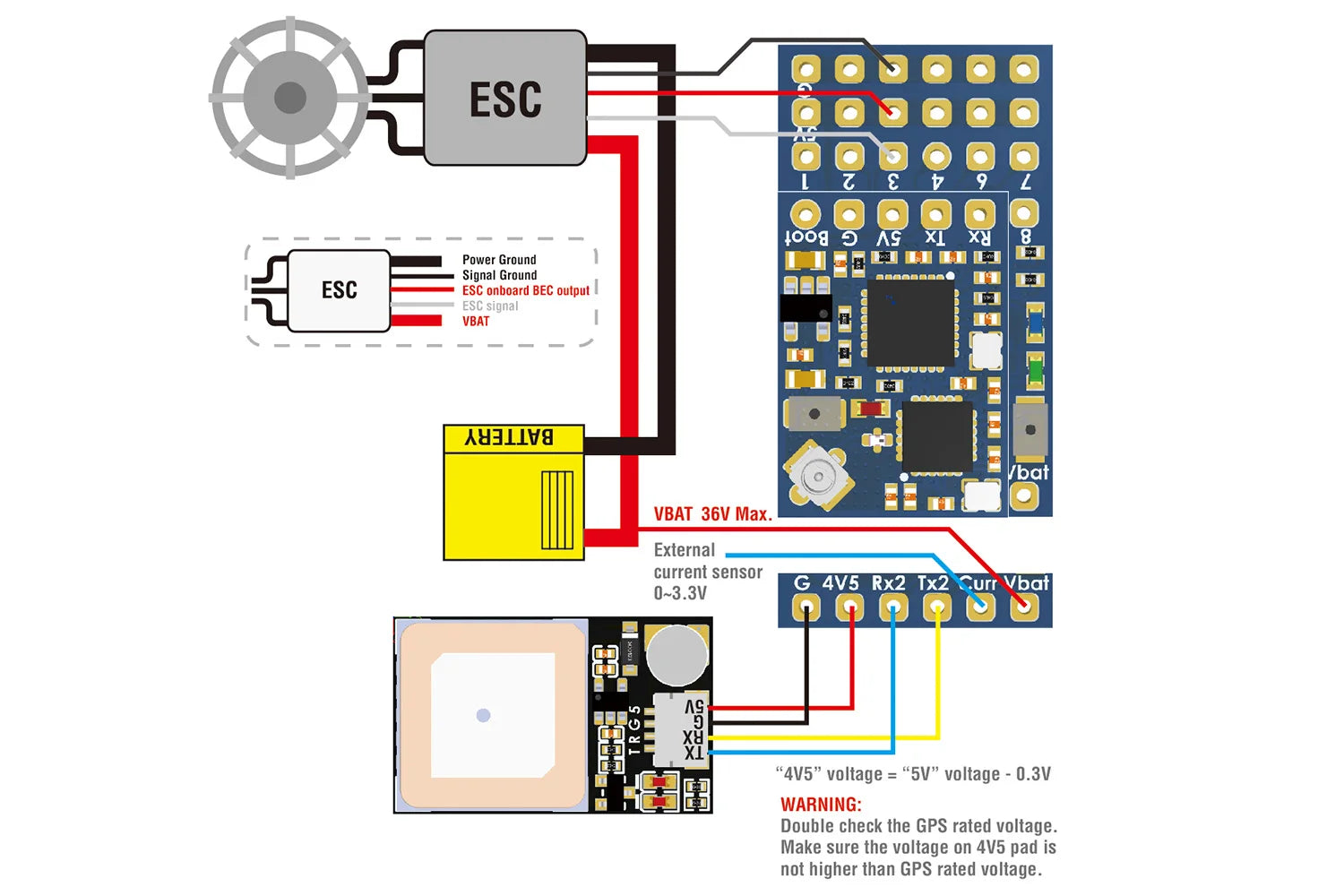
最大 36Vバッテリー電圧センス(1K:10K分圧器内蔵)
-
外部電流センサー (0~3.3V) と互換性があります
-
RxBt、Curr、Capa、Bat%、GPS テレメトリおよび VSpd(Vario)
-
定格電圧: 3.5 ~ 9V @5V パッド、0 ~ 36V @Vbat、0 ~ 3.3V @Curr
-
消費電力: 50mA(バインディング)、90mA(Wi-Fi モード)
-
5V レギュレータは内蔵されていません。サーボは、CRSF-PWM-V ボードの 5V パッドを介して外部 5V 電源から電力を供給する必要があります。
-
フェイルセーフ値を構成可能
-
ファームウェアはアップグレード可能
-
物理的:
-
PCB サイズ: 27x16mm、
-
重量: 5g (アンテナおよび 2.54 ピンを含む)
-
-
梱包:
-
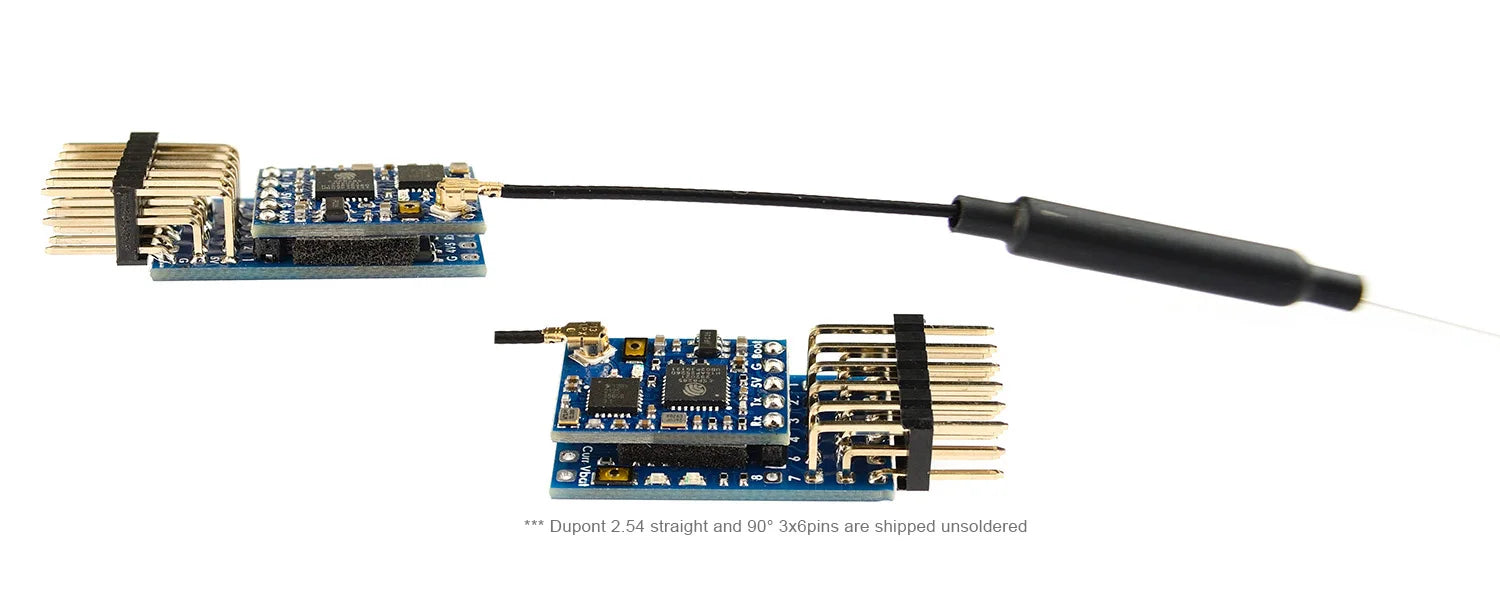
1x ELRS-R24-V (CRSF-PWM-V および 2.4G レシーバーを含む)
-
IPEX MHF1 アンテナ x 1
-
2.54 mm ストレートおよび 90° 3×6 Dupont ピン
-
ファームウェア
-
2.4GHz レシーバー: ExpressLRS /DIY_2400_RX_ESP8285_SX1280、V2.0 以降
-
CRSF-PWM-V: crsf_pwm_v2.0 以降
ピン配置とパッド
-
レシーバー用 Tx1/Rx1(UART1) 統合
-
GPS/ファームウェア更新/パラメータ設定用の Tx2/Rx2(UART2)
-
1~8: CH1~CH8 PWM 出力
-
Curr: 電流センサー信号 (0~3.3V)
-
Vbat: 0~36V バッテリー電圧検出
-
G: 地面
-
4v5 パッド電圧 = 5V パッド電圧 -0.3V。
-
5V レギュレータは内蔵されていないため、外部 5V 電源を介してボードとレシーバに電源を投入する必要があります
フェールセーフ (FW 2.0.0 以降)
-
CH3 はスロットル用に配置されており、デフォルトではフェールセーフ値 = 988 です。以下の設定により、CH3 およびその他のチャンネルのフェイルセーフ値を変更できます。
-
フェイルセーフ設定を開始する前に、ESC 信号が CRSF-PWM ボードから切断されていることを確認してください
-
PWM1 および PWM2 信号パッドをブリッジし、CRSF-PWM ボードとレシーバの電源をオンにします。
-
CRSF-PWM ボードの電源がオンになり CRSF 信号を受信した後、フェールセーフ値は自動的に保存されます。 LED が 8 回速く点滅します。
-
フェールセーフ値 = CRSF 信号が CRSF-PWM ボードで受信されるときの各送信チャネルの PWM 値。
-
PWM 1 と 2 の間のジャンパを外すと、CRSF-PWM ボードは通常の PWM 出力モードで動作します。
LED ステータス
-
ゆっくり点滅: CRSF-PWM ボードは CRSF 信号を受信していません。例: レシーバーがトランスミッターにバインドされていません。
-
点灯: CRSF-PWM ボードと受信機は正常に動作しています
-
電源投入後 10 秒間 5 回高速点滅: CLI モードがアクティブです
GPS テレメトリ
-
GPS NMEA プロトコル、1Hz、ボー 9600 ~ 115200 と互換性があります
-
GPS「TX」から CRSF-PWM ボード「RX」への単線半二重 UART 接続。CRSF-PWM ボード「TX」から GPS 「RX」は必須ではありません。
-
サポート GPS テレメトリ ID: GPS、GSpd、Hdg、Alt、Sats
-
u-blox シリーズ GPS はデフォルトで「0+1 – UBX+NMEA」プロトコルを出力できます
-
CRSF-PWM ボードが GPS に接続されると、センサー (GPS、GSpd、Hdg、Alt、Sats) が送信機の TELEMETRY タブで点滅します。
-
GPS テレメトリがない場合のトラブルシューティング。GPS と CRSF-PWM ボードの間の配線を再確認してください。一部の u-blox GPS は NMEA プロトコルを出力しない可能性があります。u-center で GPS をデフォルト設定に戻す必要があります。
-
OpenTX テレメトリ ログ を使用すると、飛行経路をプロットしたり、失われた飛行機を検索したりできます。
VSpd テレメトリ
-
気圧計 SPL06-001 (I2C アドレス 0x76) 統合
-
VSpd テレメトリは、ExpressLRS 2.0、EDGE 2.6、OPENTX 2.2 以降でサポートされています。
TIM および PWM 周波数
-
すべての 10x チャネルの PWM 周波数は TIM に従って設定可能
-
PWM はデフォルトで 50Hz で実行されます
-
TIM2: CH1、CH2、CH4
-
TIM16: CH3
-
TIM3: CH5、CH6、CH7、CH8
CLI モード
-
電源投入後 10 秒以内に CRSF-PWM ボードが UART2 に接続された GPS を検出しない場合、CLI モードがアクティブになります。
-
CLI モードがアクティブになった後、CRSF-PWM ボードは USB-TTL モジュール/FC パススルー経由でコンフィギュレータに接続できます。
-
CLI モードでは、CRSF-PWM ボードのファームウェアを更新できます
-
CLI モードは受信機の CRSF 信号と PWM 出力には影響しません
ファームウェア
-
ご覧ください CRSF TO PWM CONVERTER CRSF-PWM-V ボードのファームウェア アップデートのページ
-
ツール: Matek コンフィギュレーター
-
A または B 経由
詳しくはこちら
Related Collections


