-
CUAV V5+ 캐리어 보드 자동 조종 장치 Pixhawk 비행 컨트롤러 - FPV RC 드론 쿼드콥터 헬리콥터 VTOL
정가 $192.64 USD정가단가 단위 -
CUAV V5+/X7+ 캐리어 베이스 보드 비행 컨트롤러, Pixhawk FMU v5, STM32F765, PX4/ArduPilot
정가 $208.60 USD에서정가단가 단위 -
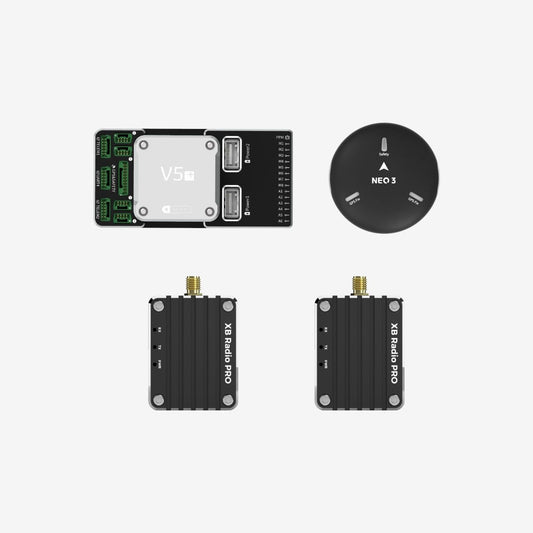
CUAV 새로운 매치 멀티 로터 헬리콥터 패키지 - V5+ 자동 조종 장치 비행 컨트롤러 NEO 3 GPS 및 XBEE Pro 원격 측정 세트
정가 $1,066.02 USD정가단가 단위 -
CUAV P9 무선 데이터 및 Pixhawk Drone Fpv V5+ 비행 컨트롤러 NEO 3 Pro GPS 원격 측정 콤보
정가 $1,645.35 USD정가단가 단위 -
CUAV V5+ Flight Flightcase RTK 9Ps GPS 및 P900 무선 원격 측정 콤보 키트가 포함된 새로운 1-다중 스타 패키지
정가 $5,056.40 USD정가단가 단위 -
CUAV V5+ 비행 컨트롤러 RTK 9Ps GPS P9 무선 원격 측정 GNSS 키트 세트를 갖춘 새로운 일대다
정가 $3,832.45 USD정가단가 단위 -
CUAV Pixhawk 드론 Fpv V5+ 비행 컨트롤러 NEO 3 Pro GPS 및 대기 속도 튜브 SKYE 모듈 콤보
정가 $1,105.22 USD정가단가 단위 -
CUAV 새로운 Pixhack Pixhawk V5+ 자동 조종 장치 - FPV RC 드론 쿼드콥터 헬리콥터 비행 컨트롤러 및 NEO V2 3 Pro GPS 콤보
정가 $616.54 USD에서정가단가 단위 -
CUAV VTOL Rc Drone Pixhawk Autopilot V5+ 코어 캐리어 보드 패키지, NEO 3 GPS 및 P9 원격 측정 콤보 포함
정가 $1,869.14 USD정가단가 단위 -
CUAV Pixhawk 드론 Fpv V5+ 비행 컨트롤러 NEO 3 Pro GPS 및 CAN 전원 PMU 모듈 콤보
정가 $1,057.20 USD정가단가 단위 -
CUAV CAN PDB 자동 조종 장치 캐리어 보드 V5+ Plus Core - RC 드론 Pixhawk 비행 컨트롤러
정가 $826.81 USD정가단가 단위 -
CUAV 새로운 드론 UAV FPV V5+ 자동 조종 장치 Pixhawk 비행 컨트롤러(TF Luna Radar Lidar 모듈 포함)
정가 $657.82 USD정가단가 단위