






CUAV 새로운 V5 + 자동 조종 장치 비행 컨트롤러-FPV RC Drone Quadcopter Helicopter Pixhawk 용 FMU V5 오픈 소스 하드웨어 기반
CUAV 새로운 V5 + 자동 조종 장치 비행 컨트롤러-FPV RC Drone Quadcopter Helicopter Pixhawk 용 FMU V5 오픈 소스 하드웨어 기반
CUAV
픽업 사용 가능 여부를 로드할 수 없습니다.
사양
휠베이스: 하단 플레이트
부품/액세서리 업그레이드: 비행 컨트롤러
도구 공급: 조립 클래스
기술 매개변수: 값 10
크기: 설명으로
원격 제어 주변 장치/장치: 수신기
권장 연령: 12세 이상, 18세 이상
RC 부품 및 액세서리: 모터 구성품
수량: 1개
원산지: 중국 본토
모델 번호: CUAV NEW V5+ 자동 조종 비행 컨트롤러
재료: 복합 재료
4- 휠 드라이브 속성: 조립
차량 유형: 헬리콥터
V5 + AutoPilot
V5+ AutoPilot®은 CUAV®로 설계 및 제작된 고급 자동 조종 장치입니다. 이 보드는 FMUv5open 하드웨어 설계를 기반으로 하고 외부 인터페이스는 Dronecode 표준 핀아웃을 사용하며 모듈식 설계를 통해 사용자가 백플레인을 설계할 수 있습니다. PX4 및 ArduPilot 펌웨어와 완벽하게 호환됩니다. 주로 학술 및 비즈니스 개발에 사용됩니다.
빠른 요약
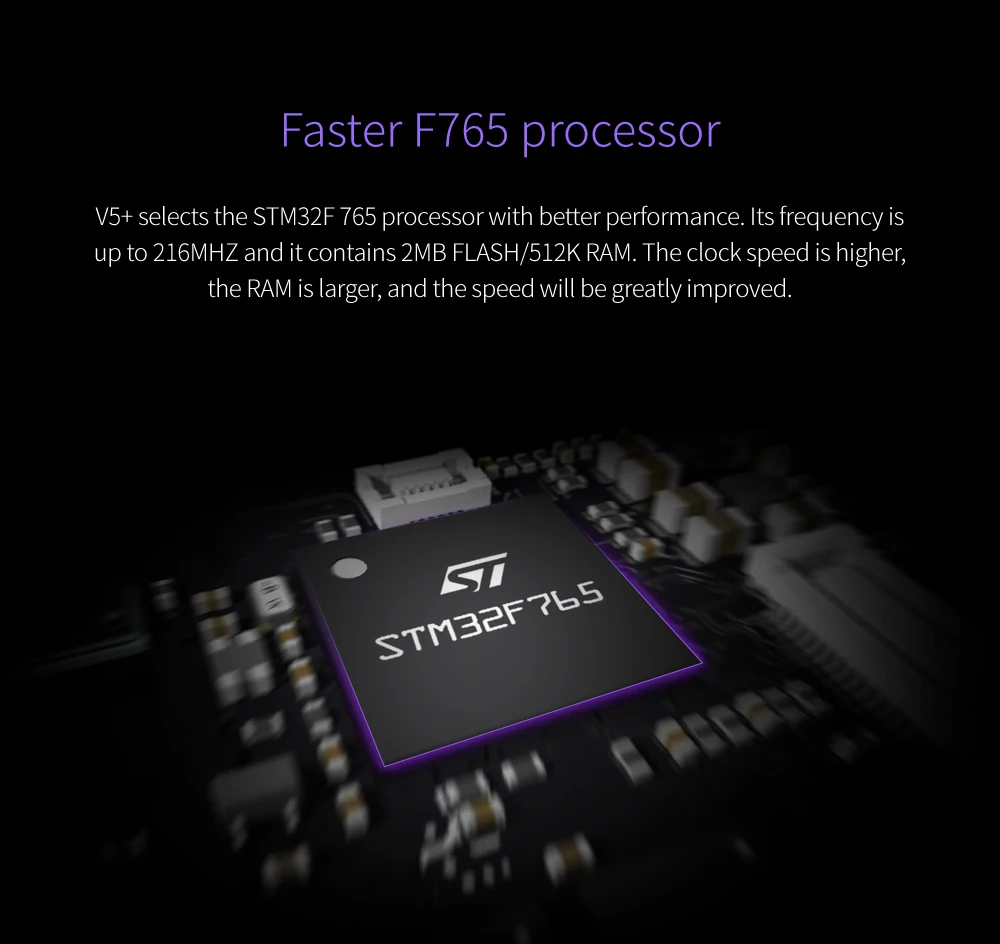
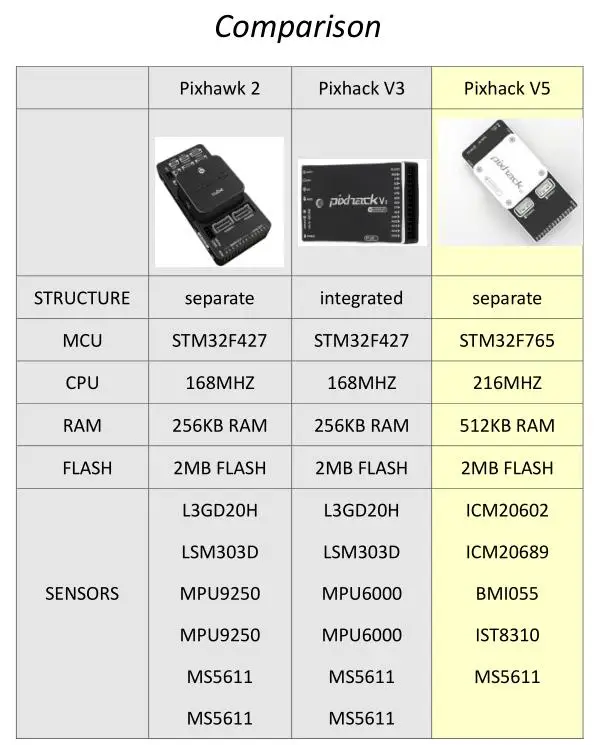
주요 FMU 프로세서: STM32F765
32비트 Arm® Cortex®-M7, 216MHz, 2MB 메모리 , 512KB RAM
IO 프로세서: STM32F100
32비트 Arm® Cortex®-M3, 24MHz, 8KB SRAM
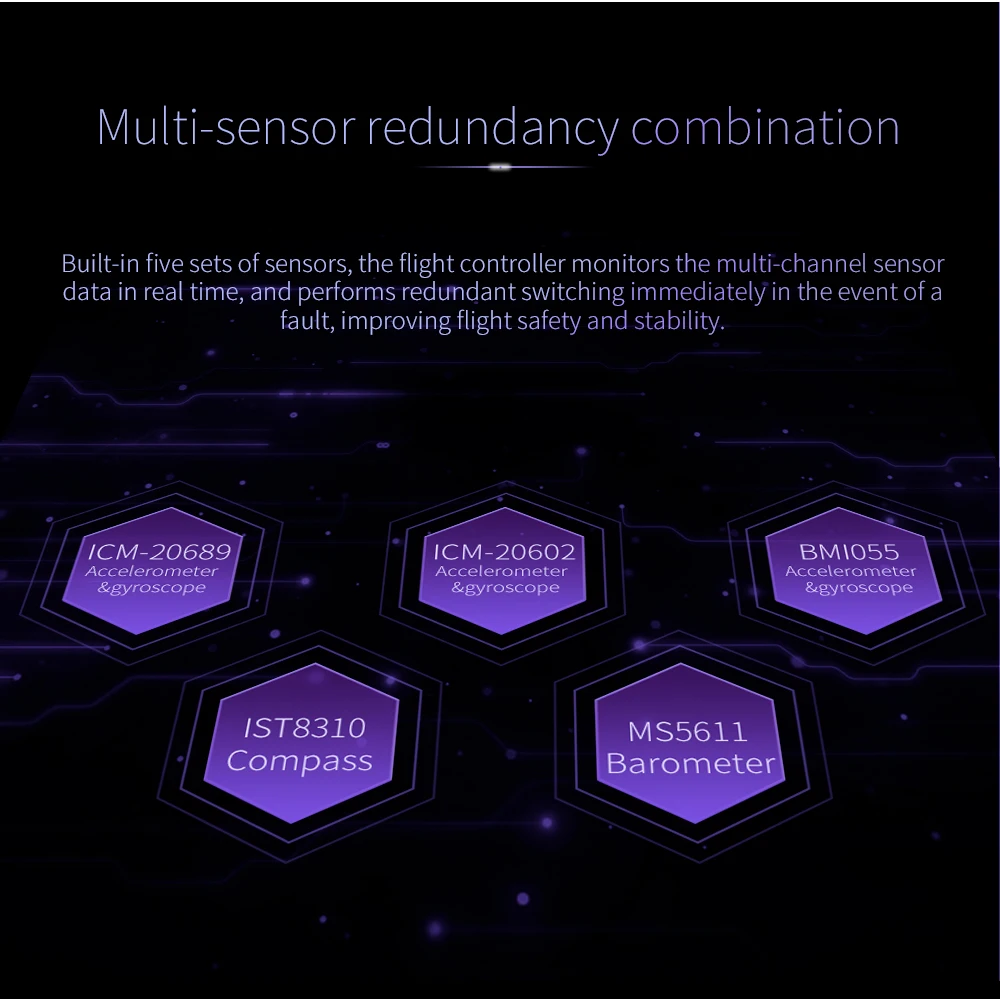
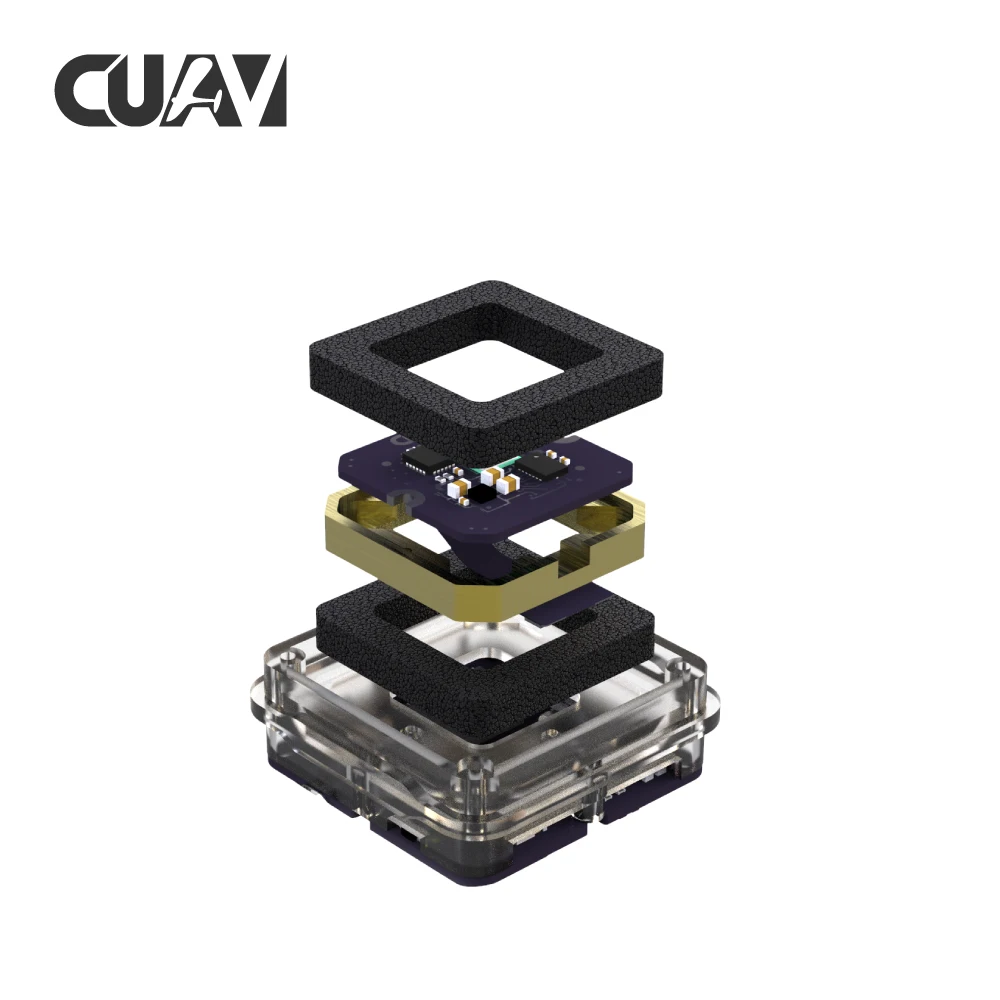
온보드 센서:
가속도계/자이로스코프: ICM-20689
가속도계/자이로스코프: BMI055
자력계: IST8310
기압계: MS5611
인터페이스:
8-14 PWM 출력(IO에서 6개, FMU에서 8개)
FMU의 전용 PWM/캡처 입력 3개
전용 R/C CPPM용 입력
PPM 및 S.Bus용 전용 R/C 입력
아날로그/PWM RSSI 입력
S.Bus 서보 출력
범용 직렬 포트 5개
I2C 포트 4개
SPI 버스 4개
CAN 버스 2개 직렬 ESC 포함
2 배터리의 전압/전류용 아날로그 입력
전원 시스템:
USB 입력: 4.75~5.25V
서보 레일 입력: 0~36V
무게: 90g
치수: 85.5*42*33mm
기타 특성:



패키지 포함:
FC(GPS 포함) :
제품 사진:









Related Collections







