







Feetech STS3215 - 7.4V 20KG 360° 25T 자기 인코더 직렬 버스 서보 다회전 서보 고정밀 스텝 모드 서보
Feetech STS3215 - 7.4V 20KG 360° 25T 자기 인코더 직렬 버스 서보 다회전 서보 고정밀 스텝 모드 서보
Feetech
정가
$25.31 USD
정가
할인가
$25.31 USD
단가
단위
세금이 포함된 가격입니다.
배송료는 결제 시 계산됩니다.
픽업 사용 가능 여부를 로드할 수 없습니다.
Feetech STS3215 - 7.4V 20KG 360° 서보 사양
브랜드명: 피테크
원산지: 중국 본토
재질: 플라스틱
플라스틱 유형: PC
RC 부품 및 액세서리: 배터리 - LiPo
크기: 10*10*10
차량 종류: 자동차
용도: 차량 및 원격 조종 장난감
부품/액세서리 업그레이드: 리튬 배터리
원격 제어 주변기기/장치: 리모컨
도구 소모품: 배터리
수량: 1개
기술적 매개변수: KV1100
모델 번호: STS3215
사륜구동 속성: 모터
휠베이스: 나사
모델 번호: STS3215
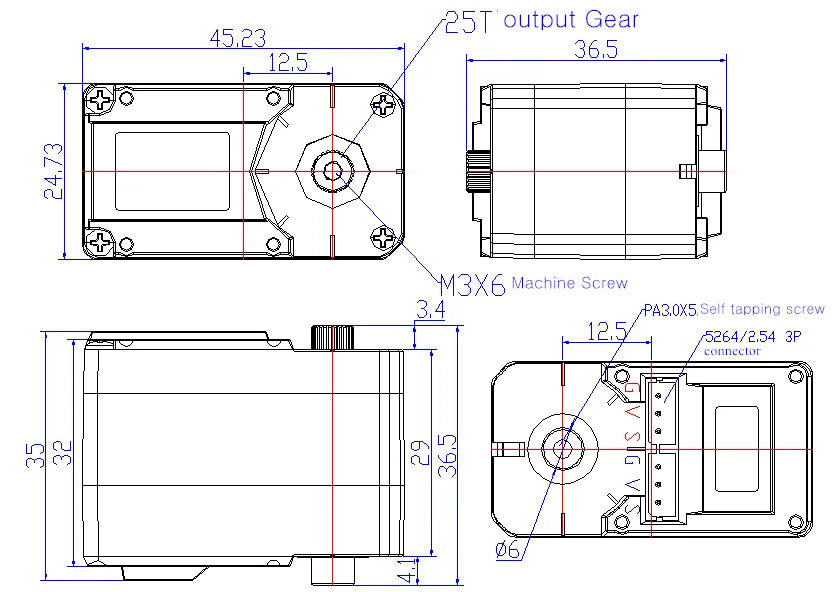
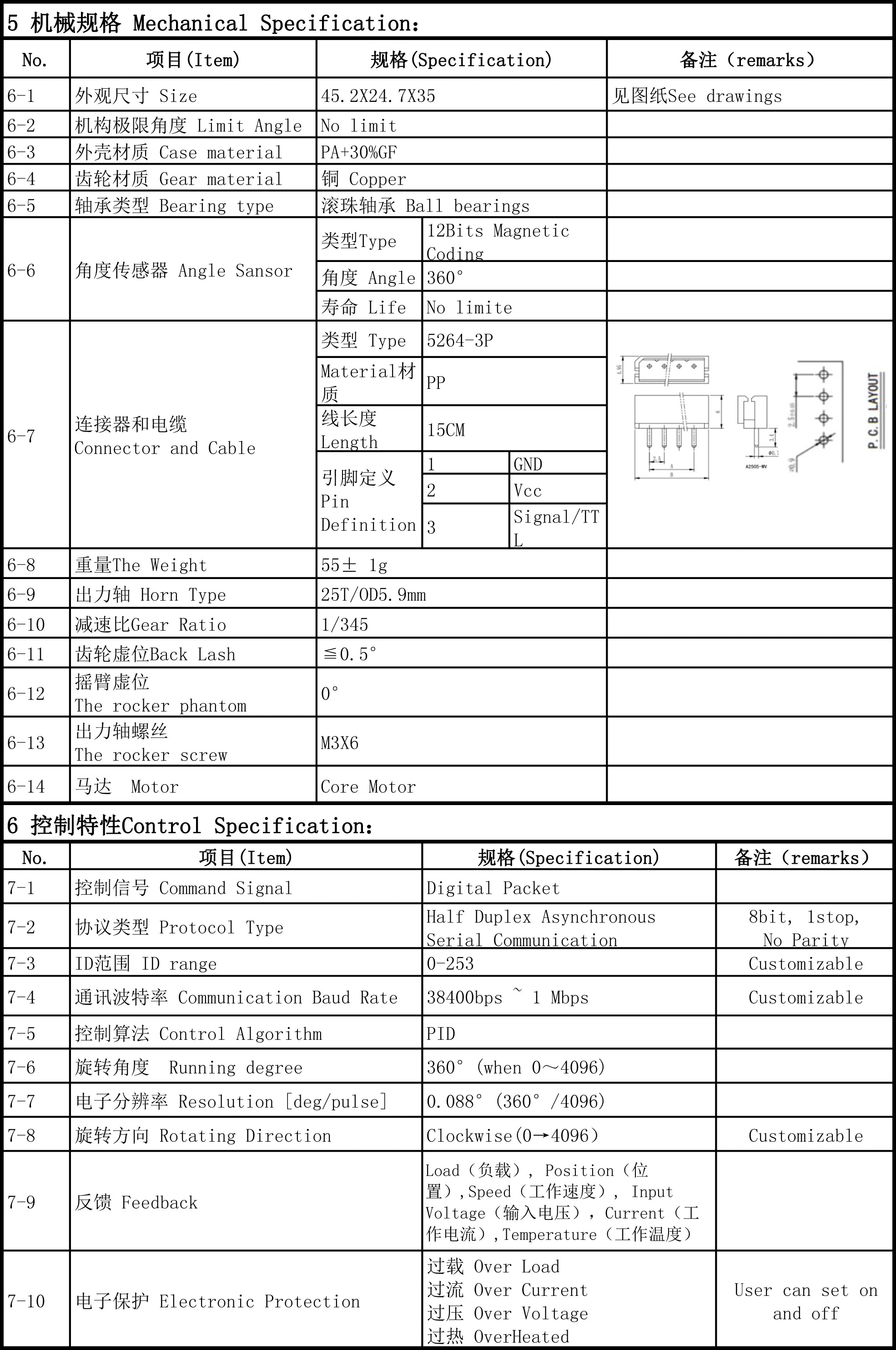
크기: 45.2X24.7×35mm
무게: 55± 1g
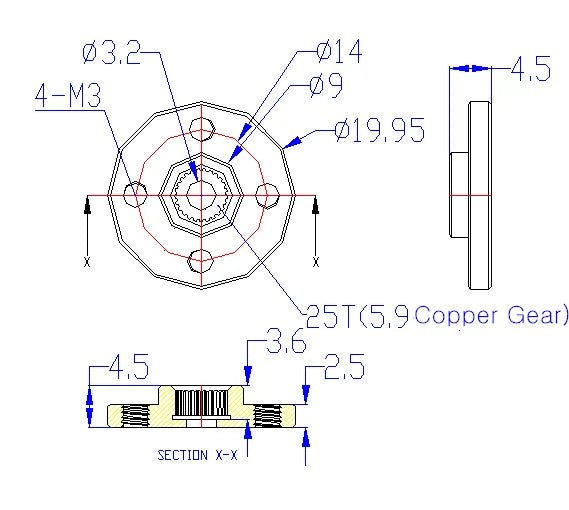
기어 유형: 구리
제한 각도: 제한 없음
베어링: 볼 베어링
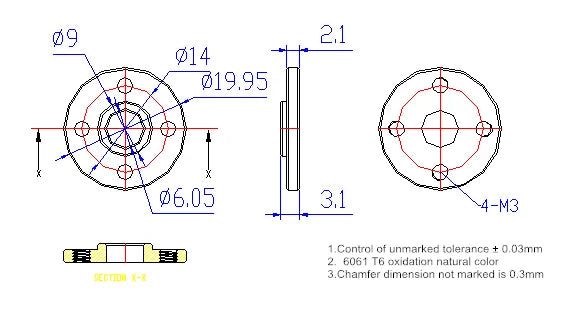
혼 기어 스플라인: 25T
모터: 코어리스 모터
작동 전압 범위: 6-7.4V
피크 스톨 토크: 19.5kg.cm@6V
정격토크: 6.5kg.cm@6V
프로토콜 유형: 반이중 비동기 직렬 통신
|
제품명
|
Feetech 2020 신제품 STS3215마그네틱 엔코더 360°직렬 버스 서보 평가
|
|
크기
|
45.2X24.7X35mm
|
|
무게
|
55±1g
|
|
스톨 토크
|
|
|
스톨 속도
|
|
|
피드백
|
부하/위치/속도/전압/전류/온도
|
|
전자적 보호
|
과열/과전류/과전압/과부하 보호
|
|
ODM 및 OEM 전문
|
예
|
|
수명 테스트
|
>100000
|
|
모터 소음
|
45±5dB
|
|
조향장치 소음
|
60±5dB
|
|
방수 성능
|
아니오
|
|
프로토콜 유형
|
반이중 비동기 직렬 통신
|
-
구조적 특징:
-
쉘은 더 높은 강도의 엔지니어링 플라스틱 쉘을 채택하고, 중심 거리를 최적화하고, 더 컴팩트한 전체 구조, 서보 기어는 1:345 구리 기어 조합, 더 높은 토크를 채택합니다. 동일한 토크에서 표준 서보와 비교합니다. 크기, 낮은 프로파일(5mm)로 보입니다. 본체는 이중 축 구조 설계를 채택합니다. 원형 줄이 있는 솔리드의 구조적 특성, 금속 주요 부 서보 혼이 있는 이중 출력 케이블의 배선 모드, 4족 로봇, 뱀에 적용하기에 적합합니다. 로봇, 데스크탑 로봇, 휴머노이드 로봇 및 기계 팔.
당사 제품은 CE 및 ROHS 인증을 통과했으며 대부분이 외관 특허 및 실용 신안 특허를 출원했습니다.

ODM, OEM, Custom Made 전문업체 1.로고 라벨 또는 인쇄물
2.서보선
3.포장: PE 가방, 색상 상자, 로고가 있는 플라스틱 상자
4.케이블 커넥터
5.다양한 작동 전압 서보
2.서보선
3.포장: PE 가방, 색상 상자, 로고가 있는 플라스틱 상자
4.케이블 커넥터
5.다양한 작동 전압 서보
제품 사용
전자 제어 기능:
1.가속 시작 정지 기능: 속도와 가속도 값을 설정할 수 있으며 모션 효과가 더 부드럽습니다.
2.고정밀도, 360도 절대 위치 4096비트 정밀도, 최고 위치 분해능은 0입니다.088도, 제어가 90도이면 4096 / 360 * 90 = 1024를 입력하고, 제어가 180도이면 4096 / 360 * 180 = 2048을 입력하여 계산합니다.
3.4가지 작업 모드 전환(모드 0 위치 서보, 모드 1 속도 폐쇄 루프, 모드 2 속도 개방 루프, 모드 3 단계 서보)이 있습니다.
1)、모드 0: 위치 모드, 기본 모드입니다. 이 모드에서는 360도 절대 각도 제어가 가능합니다. 가속 운동을 지원합니다.
2), 모드 1: 속도 폐쇄 루프, 프로그래밍 인터페이스에서 작동 모드는 1로 설정되고 속도 폐쇄 루프 모드로 전환되며 속도 열에 해당 속도를 입력하여 실행합니다.
3), 모드 2: 속도 개 루프, 프로그래밍 인터페이스에서 작동 모드는 2로 설정되고 속도 개 루프 모드로 전환되며 실행 시간 열에 해당 시간을 입력합니다.
4), 모드3: 단계 모드: 프로그래밍 인터페이스에서 최대/최소 각도 제한은 0으로 설정되고 작동 모드는 3으로 설정됩니다. 단계 모드로 전환합니다. 목표 위치를 향해 나아가려면 포지션 바에 위치를 입력하세요. 같은 방향으로 계속 이동하려면 해당 위치를 다시 클릭하세요.
4、다회전 모드, 360도 절대 제어 및 피드백, 최고 정확도에서 절대 위치 제어는 플러스 또는 마이너스 7회전이 될 수 있지만 전원 사이클 수는 저장되지 않고 절대 위치만 저장됩니다. 피드백 값은 유지됩니다.
5、1개의 키 교정, 임의의 위치에 360도 각도 설치, (40(십진수) 주소 입력 128(십진수)) 하나의 키 교정 현재 위치는 중간(2048(10진수))입니다.
6、TTL 통신 수준, 반이중 비동기 통신, 읽기 및 쓰기 매개변수를 조정하는 버스 프로토콜 지원, 동기 읽기 기능 추가(버스의 각 서보에서 차례로 읽기 명령을 수신하도록 명령 보내기) .)
7、다중 보호, (과부하, 과전류, 과전압, 과열, 스위치 설정, 조건 매개변수 변경)
1)、과부하 보호: 시작부터 이동하는 동안 위치 감지를 통해 장애물 차단 후 현재 위치가 목표 위치가 아닌 것으로 감지되면 하역력은 2S(기본 차단력의 20%) 동안 지속됩니다. 새 명령이 트리거될 때까지 보호 해제
2), 과전류 보호: 설정된 전류 값을 통해 전류가 설정된 전류 값에 도달하는지 확인합니다. 설정된 현재 값에 도달하면 힘을 해제합니다(기본 토크는 0입니다). 새로운 명령이 트리거될 때까지 보호 해제
3), 과전압 보호: 현재 전압 값을 감지합니다. 설정된 전압 값을 초과하면 경보음이 과전압으로 표시됩니다.
4), 과열 보호: 현재 모터 온도를 감지합니다. 온도가 설정값을 초과하면 경보가 과열로 표시됩니다.
8: 다중 피드백:
1)부하 피드백: 전류 제어 출력은 모터의 전압 듀티 사이클을 구동하며 전체 범위는 1000 = 100% 토크 출력입니다.
2)전류 피드백: 서보 작동 전류, 1 = 6.5mA
3)전압 피드백: 서보 작동 전압, 70=7V,0.1V
4)온도 피드백: 현재 서보의 내부 작동 온도(온도 측정)。
5)속도 피드백: 현재 모터 회전 속도 및 단위 시간(초당)의 단계 수 피드백
9、PID 매개변수를 엽니다.
1.가속 시작 정지 기능: 속도와 가속도 값을 설정할 수 있으며 모션 효과가 더 부드럽습니다.
2.고정밀도, 360도 절대 위치 4096비트 정밀도, 최고 위치 분해능은 0입니다.088도, 제어가 90도이면 4096 / 360 * 90 = 1024를 입력하고, 제어가 180도이면 4096 / 360 * 180 = 2048을 입력하여 계산합니다.
3.4가지 작업 모드 전환(모드 0 위치 서보, 모드 1 속도 폐쇄 루프, 모드 2 속도 개방 루프, 모드 3 단계 서보)이 있습니다.
1)、모드 0: 위치 모드, 기본 모드입니다. 이 모드에서는 360도 절대 각도 제어가 가능합니다. 가속 운동을 지원합니다.
2), 모드 1: 속도 폐쇄 루프, 프로그래밍 인터페이스에서 작동 모드는 1로 설정되고 속도 폐쇄 루프 모드로 전환되며 속도 열에 해당 속도를 입력하여 실행합니다.
3), 모드 2: 속도 개 루프, 프로그래밍 인터페이스에서 작동 모드는 2로 설정되고 속도 개 루프 모드로 전환되며 실행 시간 열에 해당 시간을 입력합니다.
4), 모드3: 단계 모드: 프로그래밍 인터페이스에서 최대/최소 각도 제한은 0으로 설정되고 작동 모드는 3으로 설정됩니다. 단계 모드로 전환합니다. 목표 위치를 향해 나아가려면 포지션 바에 위치를 입력하세요. 같은 방향으로 계속 이동하려면 해당 위치를 다시 클릭하세요.
4、다회전 모드, 360도 절대 제어 및 피드백, 최고 정확도에서 절대 위치 제어는 플러스 또는 마이너스 7회전이 될 수 있지만 전원 사이클 수는 저장되지 않고 절대 위치만 저장됩니다. 피드백 값은 유지됩니다.
5、1개의 키 교정, 임의의 위치에 360도 각도 설치, (40(십진수) 주소 입력 128(십진수)) 하나의 키 교정 현재 위치는 중간(2048(10진수))입니다.
6、TTL 통신 수준, 반이중 비동기 통신, 읽기 및 쓰기 매개변수를 조정하는 버스 프로토콜 지원, 동기 읽기 기능 추가(버스의 각 서보에서 차례로 읽기 명령을 수신하도록 명령 보내기) .)
7、다중 보호, (과부하, 과전류, 과전압, 과열, 스위치 설정, 조건 매개변수 변경)
1)、과부하 보호: 시작부터 이동하는 동안 위치 감지를 통해 장애물 차단 후 현재 위치가 목표 위치가 아닌 것으로 감지되면 하역력은 2S(기본 차단력의 20%) 동안 지속됩니다. 새 명령이 트리거될 때까지 보호 해제
2), 과전류 보호: 설정된 전류 값을 통해 전류가 설정된 전류 값에 도달하는지 확인합니다. 설정된 현재 값에 도달하면 힘을 해제합니다(기본 토크는 0입니다). 새로운 명령이 트리거될 때까지 보호 해제
3), 과전압 보호: 현재 전압 값을 감지합니다. 설정된 전압 값을 초과하면 경보음이 과전압으로 표시됩니다.
4), 과열 보호: 현재 모터 온도를 감지합니다. 온도가 설정값을 초과하면 경보가 과열로 표시됩니다.
8: 다중 피드백:
1)부하 피드백: 전류 제어 출력은 모터의 전압 듀티 사이클을 구동하며 전체 범위는 1000 = 100% 토크 출력입니다.
2)전류 피드백: 서보 작동 전류, 1 = 6.5mA
3)전압 피드백: 서보 작동 전압, 70=7V,0.1V
4)온도 피드백: 현재 서보의 내부 작동 온도(온도 측정)。
5)속도 피드백: 현재 모터 회전 속도 및 단위 시간(초당)의 단계 수 피드백
9、PID 매개변수를 엽니다.
피테크 7.4V 20KGCM 플라스틱 케이스 메탈 기어 마그네틱 엔코더 이중 샤프트 TTL 직렬 버스 서보
세부정보 이미지





Related Collections







