



MATEK F405-WTE - KONTROLER LOTU Mateksys
MATEK F405-WTE - KONTROLER LOTU Mateksys
MATEKSYS
Nie można załadować gotowości do odbioru
MATEK F405-WTE - SPECYFIKACJA KONTROLERA LOTU Mateksys
Zastosowanie: Pojazdy i zabawki zdalnie sterowane
Zalecany wiek: 12+lat,14+lat
Pochodzenie: Chiny kontynentalne
Materiał: Materiał kompozytowy
Nazwa marki: MATEKSYS
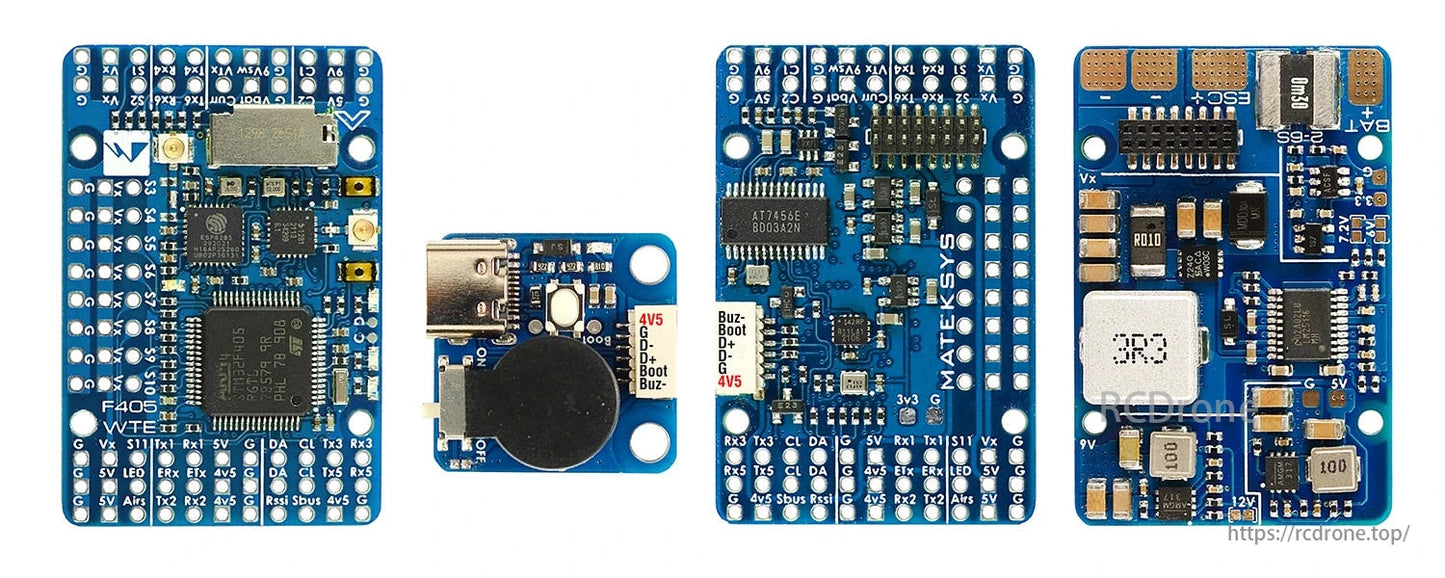
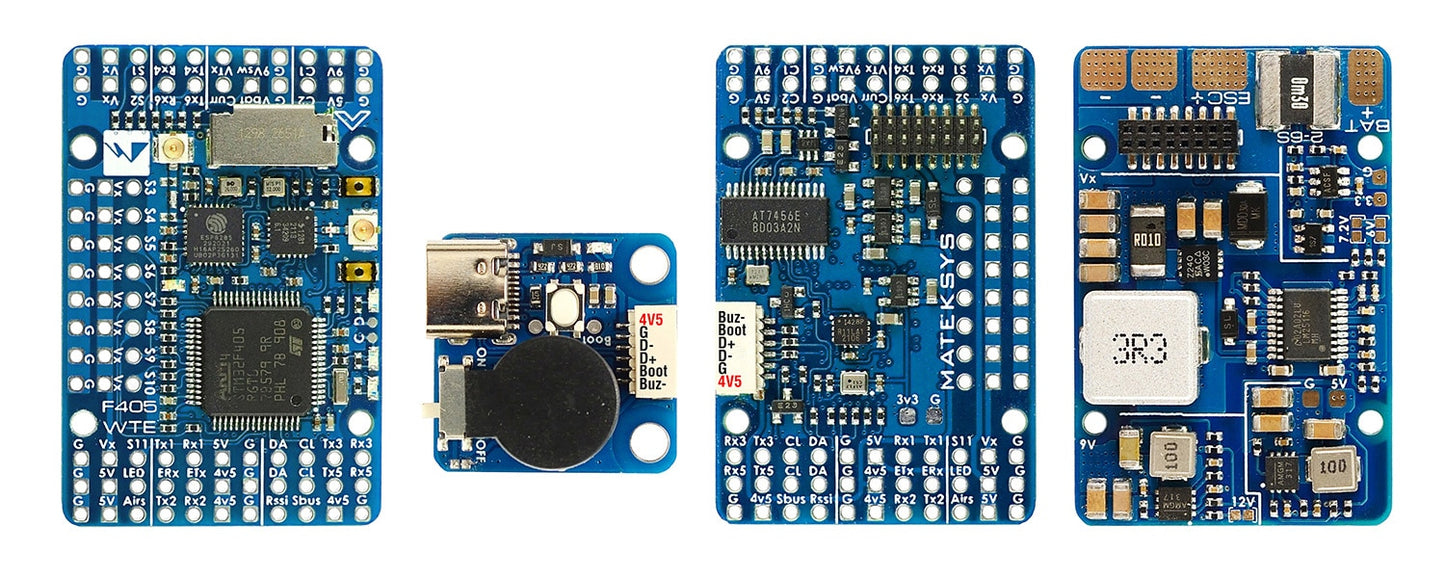
KONTROLER LOTU F405-WTE
STM32F405RGT6, ICM42688P, SPL06, OSD, telemetria ESP WIFI/odbiornik ELRS 2.4G, 6xUART, 12x PWM, 1xI2C
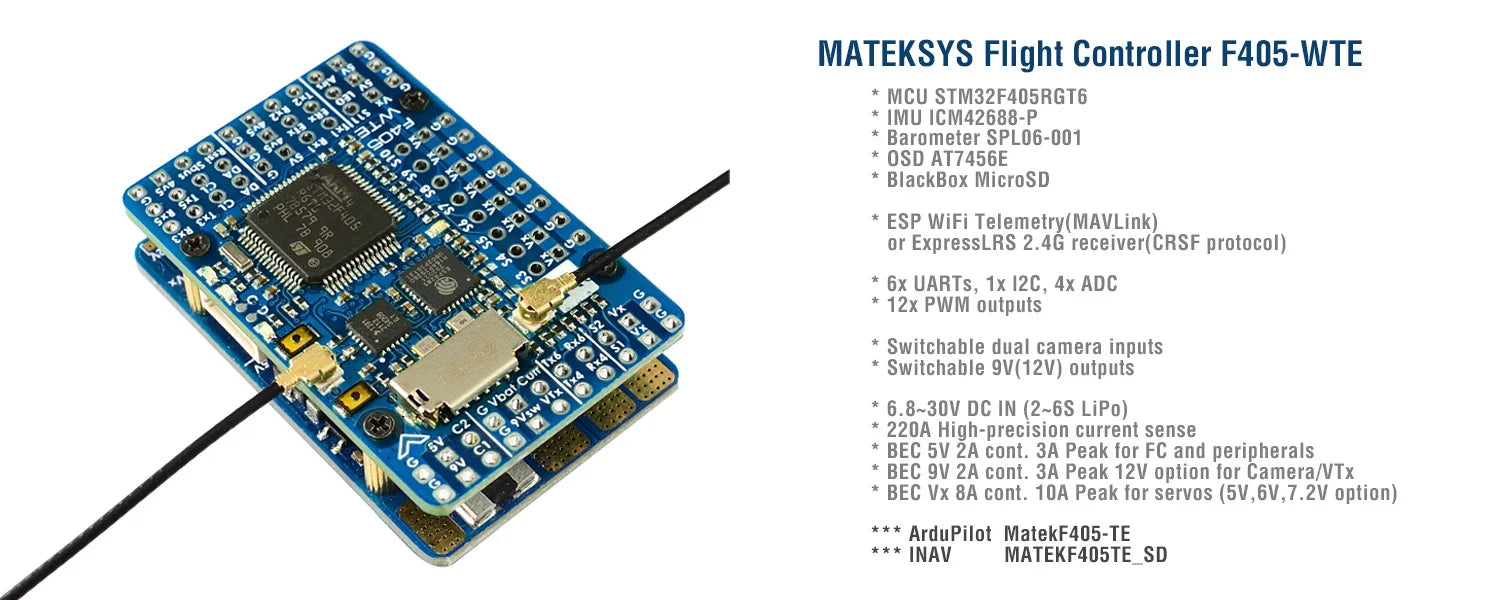
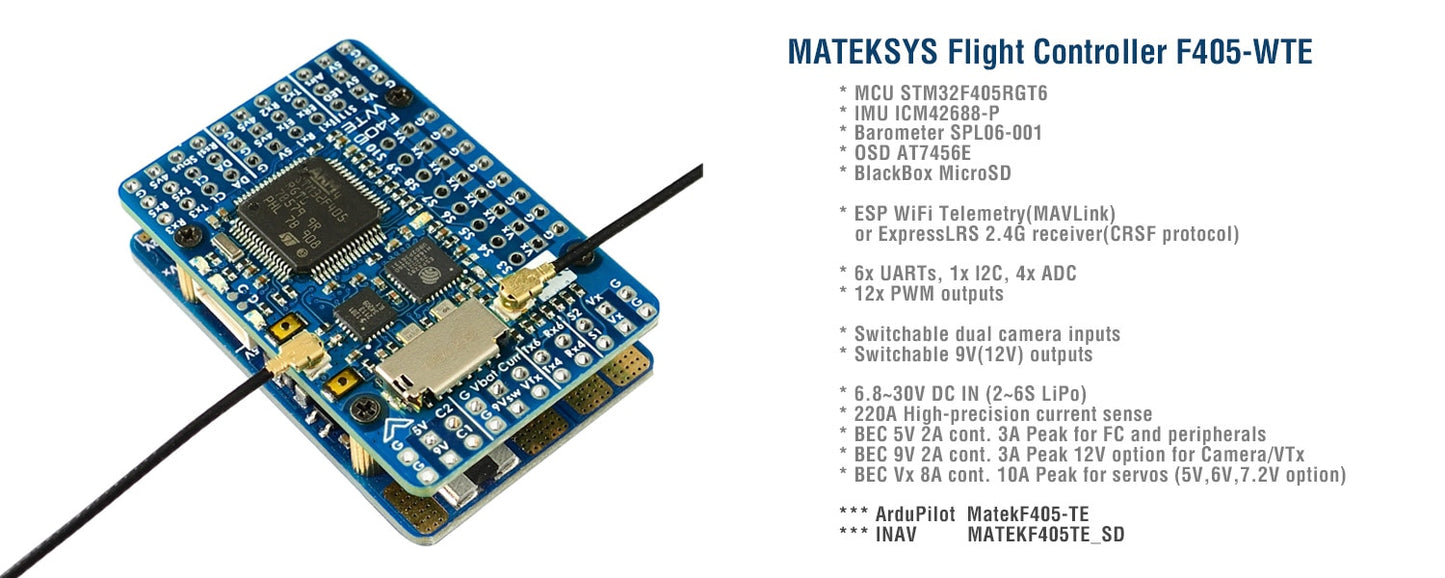
MATEKSYS Kontroler lotu F4O5-WTE MCU STM3ZFAOSRGT6 IMU ICM42688-P Barometr SPLO6-001 OSD AT7456E BlackBox MicroSD 2 8 2 2 2 ESP WiFi Telemetria (MAVLink) 2 lub odbiornik ExpressLRS 2.4G (protokół CRSF) 6x UART, Ix I2C, 4x ADC 85 12x wyjścia PWM Przełączane wejścia podwójnej kamery 4+

Specyfikacje FC
-
MCU: STM32F405RGT6, 168 MHz, 1MB Flash
-
IMU: ICM42688-P
-
Baro: SPL06-001
-
OSD: AT7456E
-
Blackbox: gniazdo kart MicroSD
-
Telemetria WiFi ESP (MAVLink, 14dBm)
-
Odbiornik ExpressLRS 2.4G (protokół CRSF, telemetria 12dBm)
-
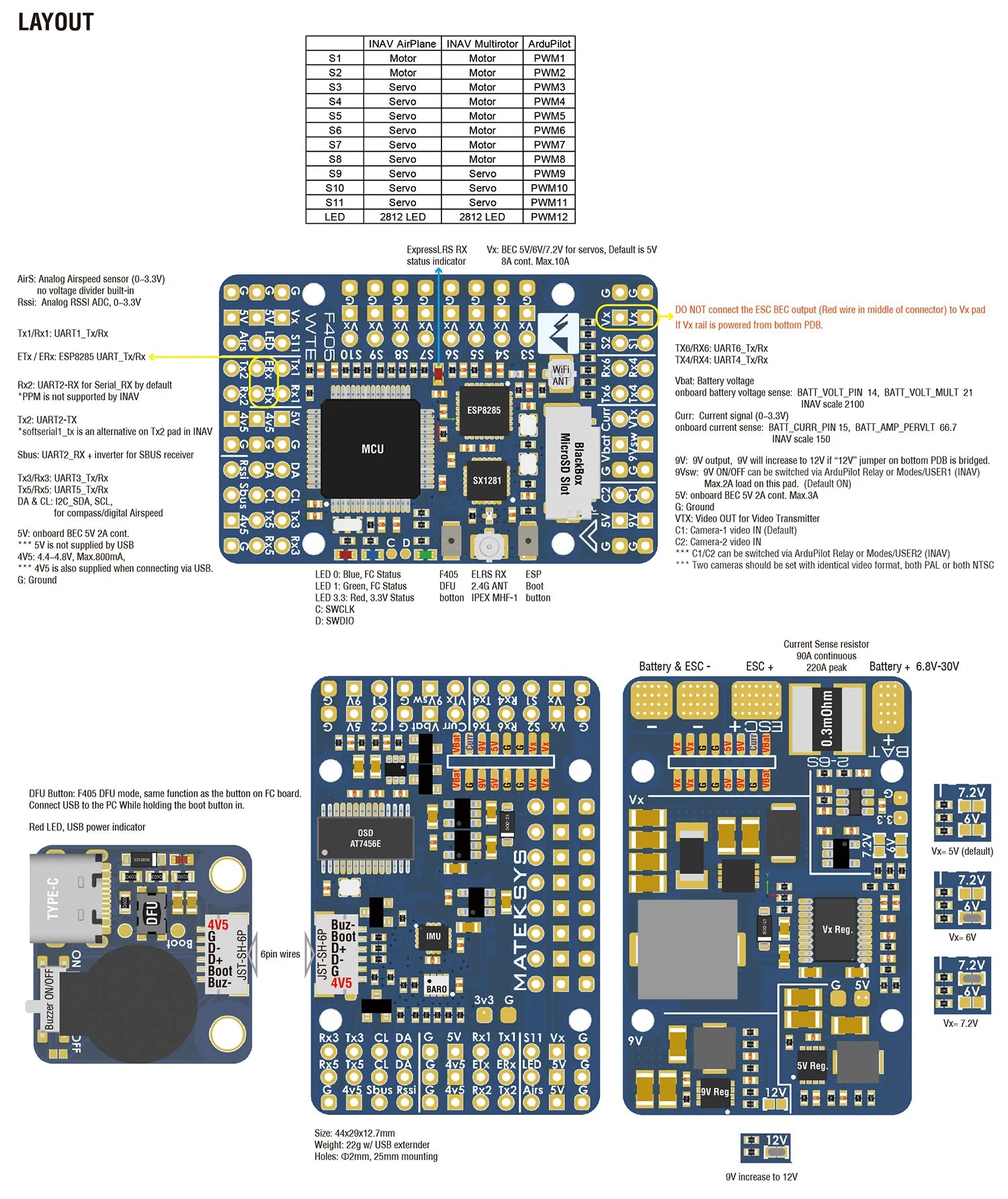
6x UART, 1x opcja Softserial_Tx (INAV)
-
12x wyjść PWM
-
1x I2C
-
4x ADC (VBAT, prąd, RSSI, prędkość lotu)
-
Przedłużacz USB/sygnału dźwiękowego z typem C (USB2.0)
-
Przełącznik dwóch wejść kamery
-
9V(12V) dla wyłącznika zasilania VTX
Oprogramowanie sprzętowe FC
-
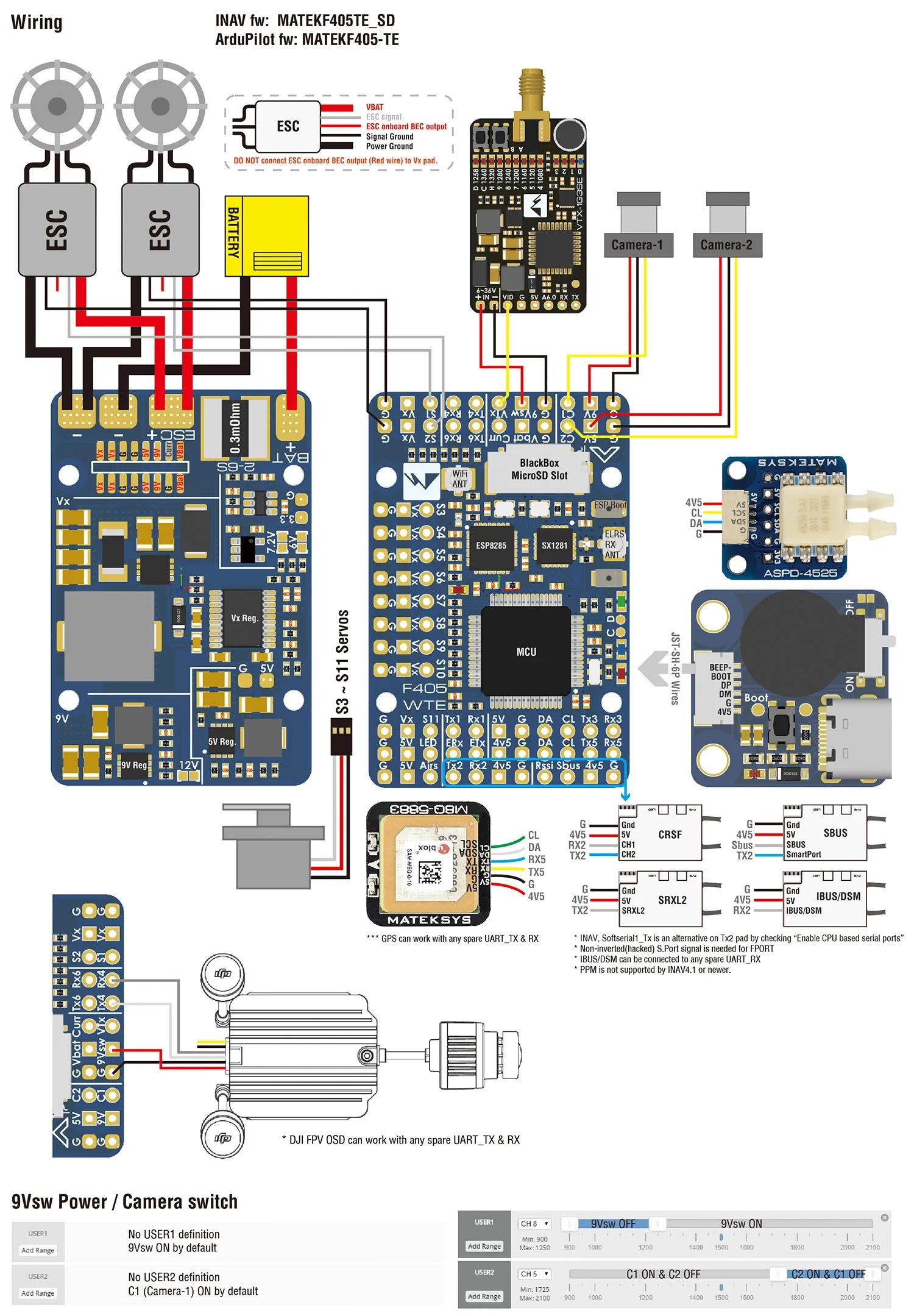
ArduPilot: MatekF405-TE
-
INAV: MATEKF405TE_SD (niedostępne w konfiguratorze INAV 4.x)
PDB
-
Zakres napięcia wejściowego: 6,8~30V (2~6S LiPo)
-
1x podkładki zasilające ESC
-
Działnik napięcia akumulatora 1K:20K (skala 2100 w INAV, BATT_VOLT_MULT 21,0 w ArduPilot)
-
Prąd czujnika: 220 A, 3,3 V ADC (skala 150 w INAV, 66,7 A/V w ArduPilot)
-
Rezystor czuły: 90A ciągły, 220A szczytowy
Wyjście BEC 5 V
-
Zaprojektowany dla kontrolera lotu, odbiornika, OSD, kamery, brzęczyka, 2812 LED_Strip, brzęczyka, modułu GPS, AirSpeed
-
Prąd ciągły: 2 ampery, maks. 3 A
Wyjście BEC 9 V/12 V
-
Zaprojektowany do nadajnika wideo, kamery, gimbala itp.
-
Prąd ciągły: 2 ampery, maks. 3 A
-
Opcja 12V ze zworką
-
dla stabilnego napięcia wyjściowego 9V/12V napięcie wejściowe powinno > napięcie wyjściowe +1V
Wyjście BEC Vx
-
Zaprojektowany dla serwomechanizmów
-
Regulowane napięcie, domyślnie 5 V, 6 V lub 7,2 V za pomocą zworki
-
Prąd ciągły: 8 amperów, maks. 10 A
-
dla stabilnego wyjścia Vx napięcie wejściowe powinno > napięcie Vx +1V
Wyjście BEC 3,3 V
-
Przeznaczony dla modułu Baro / Compass i zewnętrznego 3.Urządzenia peryferyjne 3 V
-
Regulator liniowy
-
Prąd ciągły: 200mA
Fizyczne
-
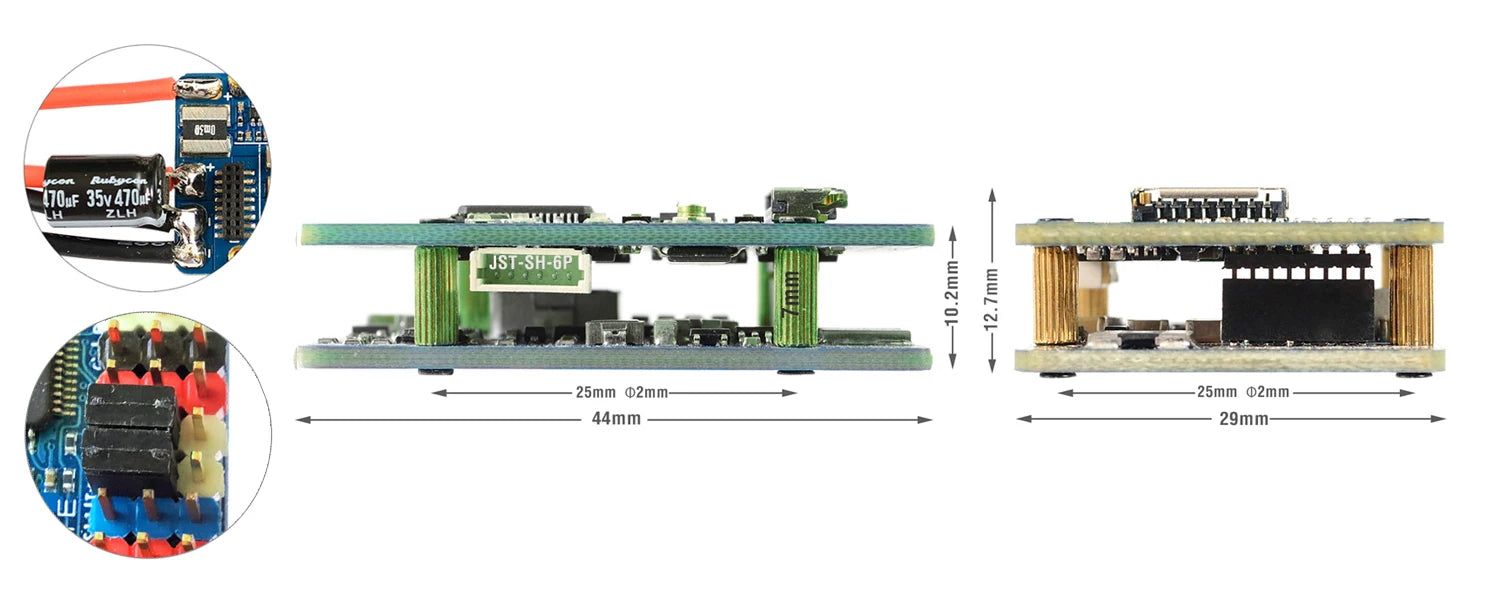
Montaż: 25 x 25mm, Φ2mm
-
Wymiary: 44 x 29 x 12,7 mm
-
Waga: 22 g z adapterem USB/brzęczyka
W tym
-
1x F405-WTE
-
1x przedłużacz USB (typ C)/sygnał dźwiękowy (brzęczyk pasywny) + kabel 20 cm JST-SH-6P do JST-SH-6P do przedłużacza USB.
-
2x anteny IPEX-MHF1 2,4G
-
1x Kondensator Rubycon ZLH 35V 470uF
-
Dupont 2,54 piny (płyta jest dostarczana nielutowana)
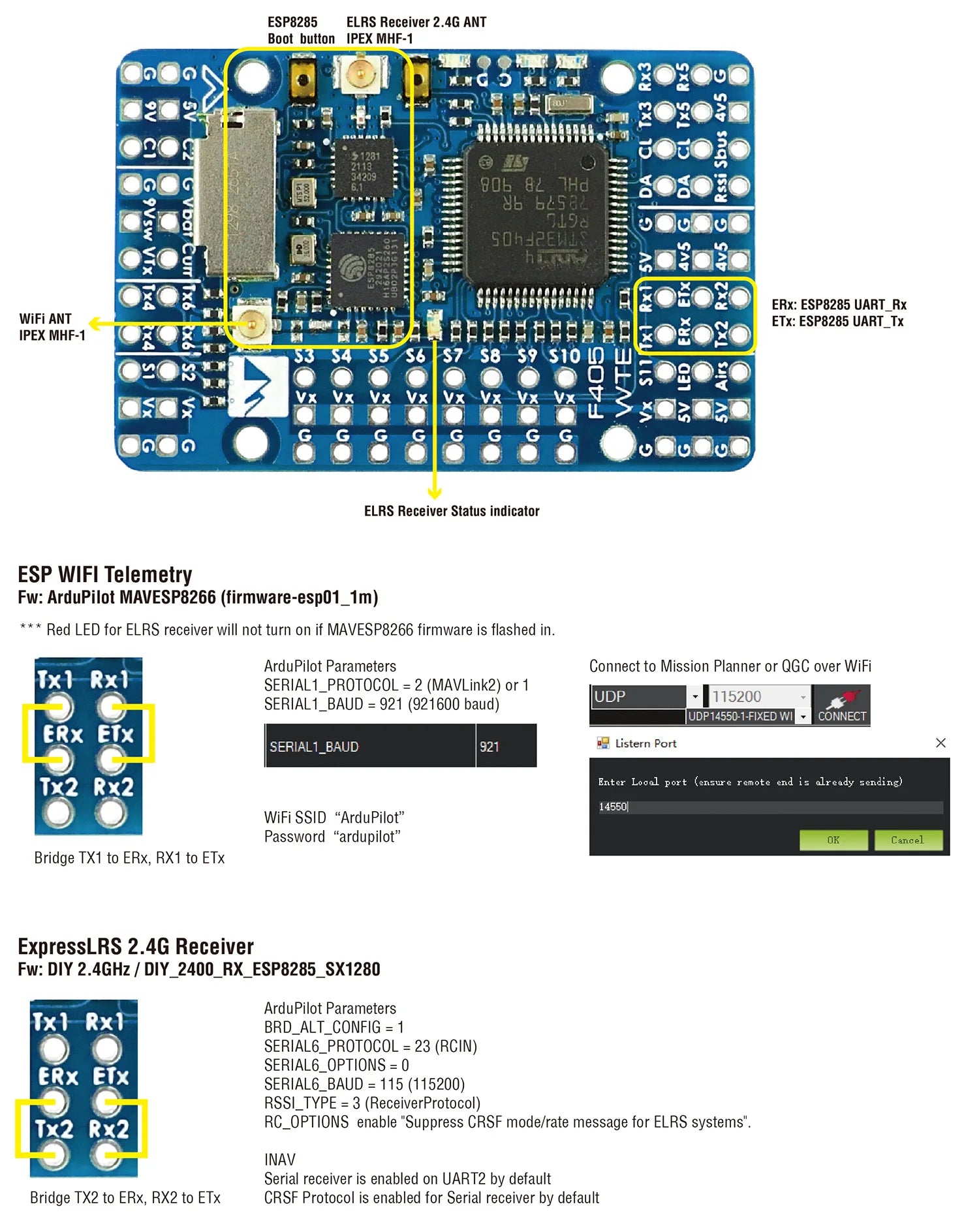
Telemetria Wi-Fi ArduPilot ESP8266
-
https://ardupilot.org/copter/docs/common-esp8266-telemetry.html
-
Narzędzie: ESP_NodeMCU-PyFlasher.exe
-
Oprogramowanie sprzętowe: oprogramowanie sprzętowe-esp01_1m.bin
-
Flashowanie za pomocą ESP_NodeMCU-PyFlasher
-
Podłącz ESP8285(ETx, ERx) do adaptera USB-TTL, z ETx na F405-WTE podłączonym do Rx na USB-TTL i ERx podłączonym do Tx USB-TTL. Połącz 4v5 i GND F405-WTE z 5V i GND USB-TTL
-
Podłącz adapter USB-TTL do komputera, naciskając i przytrzymując przycisk rozruchu ESP8285.
-
otwórz ESP_NodeMCU-PyFlasher
-
wybierz port szeregowy modułu USB-TTL, załaduj oprogramowanie sprzętowe, wybierz „Dual Output(DOUT)” i „Tak. czyści wszystkie dane„
-
kliknij „Flash NodeMCU„
-
po flashowaniu wyłącz, a następnie włącz F405-WTE przez USB lub baterię.
-
Poczekaj kilka sekund, wyszukaj identyfikator SSID Wi-Fi „ArduPilot”, a hasło to „ardupilot”
-
Wskazówka: Czerwona dioda LED odbiornika ELRS nie włączy się, jeśli zostanie wgrane oprogramowanie układowe MAVESP8266.
-
Odbiornik ExpressLRS 2.4G
-
ExpressLRS AUX1-AUX8 nie mają kanałów o pełnej rozdzielczości. https://www.expresslrs.org/2.0/software/switch-config/
-
Flashowanie przez Wi-Fi
-
Włącz F405-WTE przez USB, dioda LED odbiornika (czerwona) będzie początkowo migać powoli, a po 30 s powinna migać szybko, wskazując, że jest w trybie hotspotu Wi-Fi.
-
Więcej szczegółowych kroków znajdziesz na tej stronie.
-
Cel: Zrób to sam 2,4 GHz / DIY_2400_RX_ESP8285_SX1280
-
-
Flashowanie przez UART
-
Podłącz ESP8285(ETx, ERx) do adaptera USB-TTL, z ETx na F405-WTE podłączonym do Rx na USB-TTL i ERx podłączonym do Tx USB-TTL. Połącz 4v5 i GND F405-WTE z 5V i GND USB-TTL.
-
Podłącz adapter USB-TTL do komputera, naciskając i przytrzymując przycisk rozruchu ESP8285.
-
Wybierz cel Zrób to sam 2.4 GHz / DIY_2400_RX_ESP8285_SX1280 i „
039>UART” dla opcji Metoda flashowania, ustaw frazę powiązania i Opcje oprogramowania sprzętowego , a po zakończeniu kliknij Kompiluj i Flash.
-
Połączenie UDP z konfiguratorem INAV przez WiFi
-
Narzędzie: ESP_NodeMCU-PyFlasher.exe
-
Oprogramowanie sprzętowe: MSPWifiBridge_ESP-01.bin skompilowane na podstawie github.com/Scavanger/MSPWifiBridge
-
Flashowanie za pomocą ESP_NodeMCU-PyFlasher
-
Podłącz ESP8285(ETx, ERx) do adaptera USB-TTL, z ETx na F405-WTE podłączonym do Rx na USB-TTL i ERx podłączonym do Tx USB-TTL. Połącz 4v5 i GND F405-WTE z 5V i GND USB-TTL
-
Podłącz adapter USB-TTL do komputera, naciskając i przytrzymując przycisk rozruchu ESP8285.
-
otwórz ESP_NodeMCU-PyFlasher
-
wybierz Port szeregowy modułu USB-TTL, załaduj oprogramowanie sprzętowe, wybierz „Podwójne wyjście (DOUT)” i „Tak. czyści wszystkie dane„
-
kliknij „Flash NodeMCU„
-
po flashowaniu wyłącz, a następnie włącz F405-WTE przez USB lub baterię.
-
Poczekaj kilka sekund, wyszukaj identyfikator SSID Wi-Fi „MSPWifiBridge”, a hasło to „123456789”
-
Jeśli nie ma automatycznego przekierowania na stronę konfiguracji, przejdź do http://192.168.4.1 ręcznie. Standardowe dane logowania: Nazwa użytkownika: admin, Hasło: 123456789
-
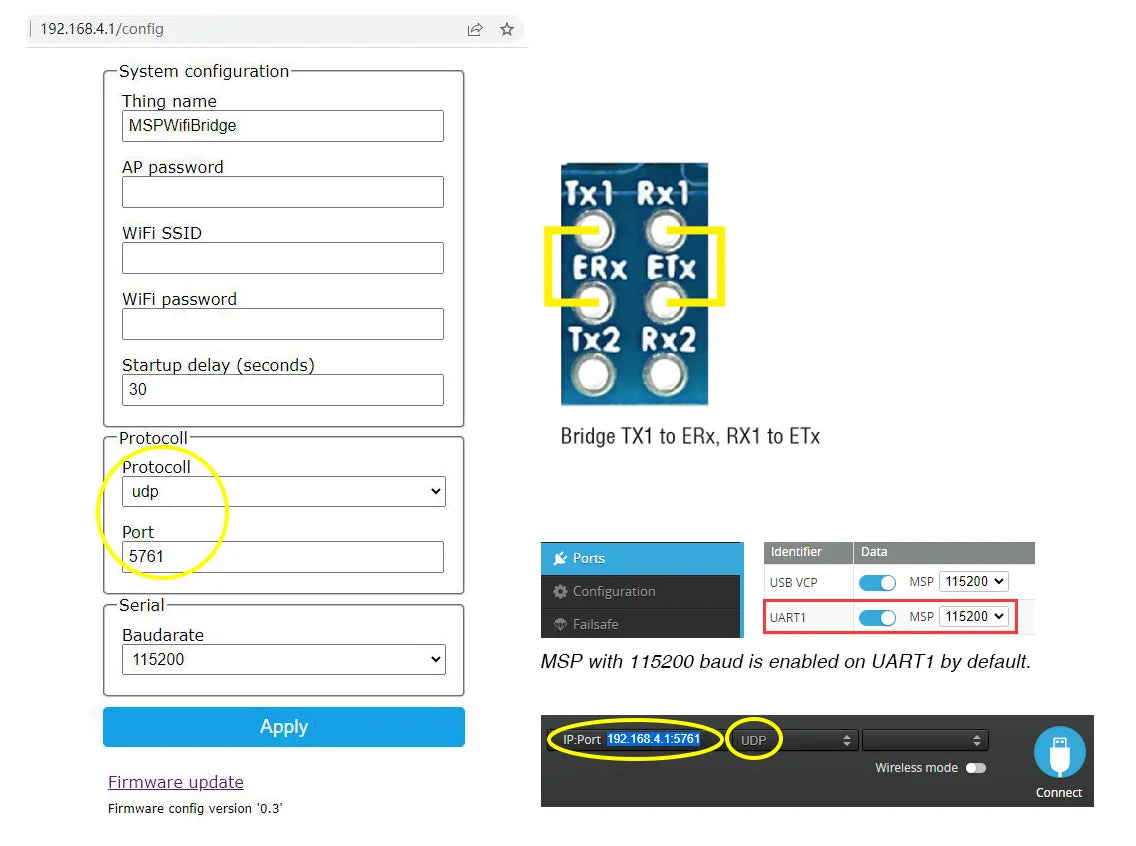
192.168.4.1/config Konfiguracja systemu Nazwa_rzeczy MSPWifiBridge Hasło AP Ixl Rx| WiFi SSID ERx ETx Hasło WiFi Tx2 Rx2 Opóźnienie Staz (sekundy 30 Protokół Most TX1 do erx, RXI do ETx Protokół udp Port 5761 Ponty Identyfikator Dane USB VC?
Related Collections

Odkryj więcej dronów i akcesoriów
-

Dron z kamerą
Nasza kolekcja dronów kamerowych oferuje szeroki wybór marek, w tym FIMI, JJRC,...
-

Akcesoria dronów
Odkryj szeroką gamę akcesoriów do dronów, aby poprawić osiągi lotu, wydłużyć żywotność...


