




DFRobot SEN0142 MPU6050 6 DOF Gyroscope Accelerometer IMU Module with I2C Digital Motion Processor for Arduino & Robotics
DFRobot SEN0142 MPU6050 6 DOF Gyroscope Accelerometer IMU Module with I2C Digital Motion Processor for Arduino & Robotics
DFRobot
Couldn't load pickup availability
Overview
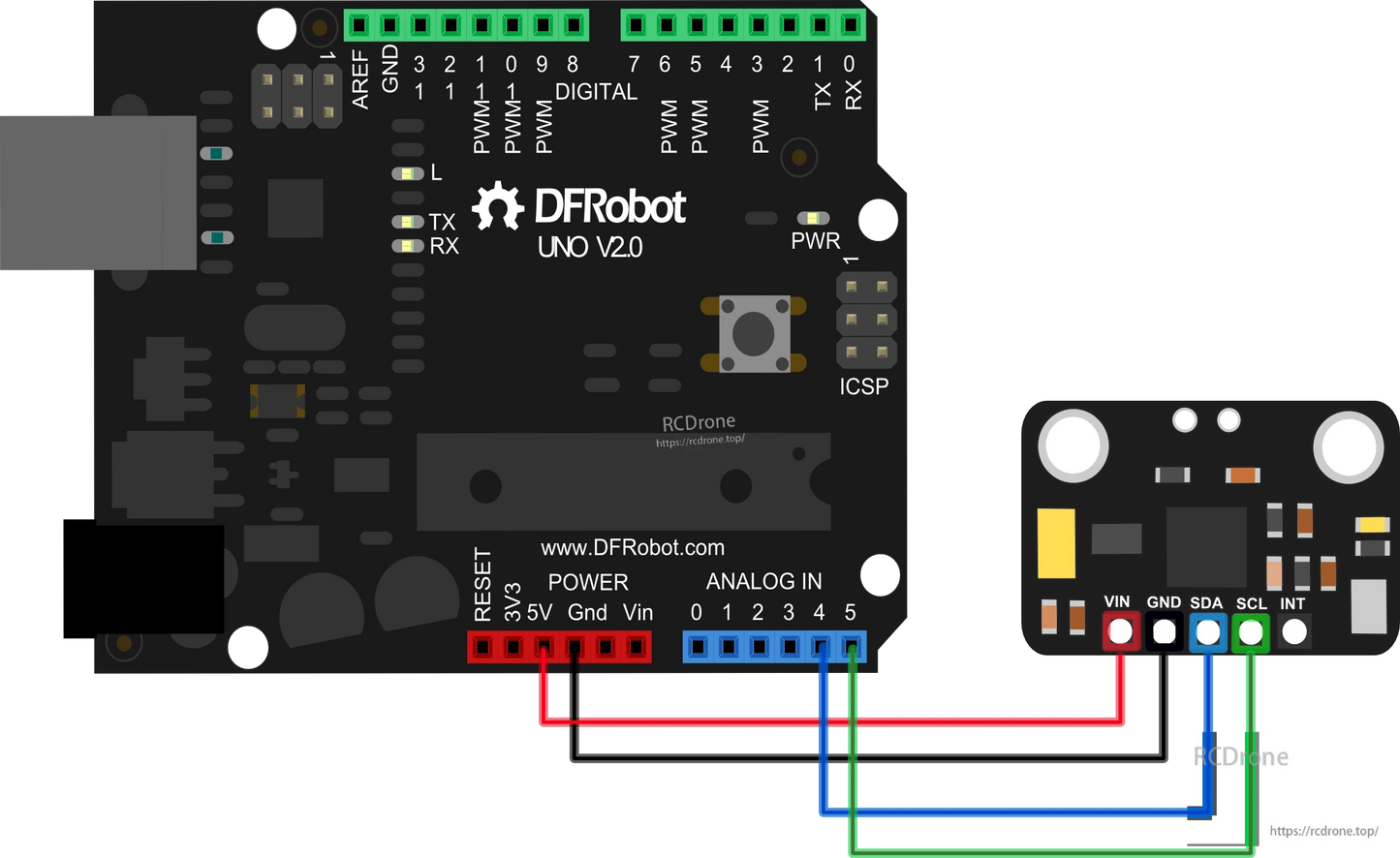
The DFRobot SEN0142 MPU6050 6 DOF IMU module integrates a 3-axis gyroscope and 3-axis accelerometer on a single chip, delivering accurate motion sensing for robotics, drones, wearable devices, and Arduino projects. Featuring a Digital Motion Processor (DMP), it supports advanced 6-axis and 9-axis MotionFusion algorithms, enabling quaternion, Euler angle, and raw sensor data output. With a wide input voltage range of 3V–5V, the MPU6050 can be directly connected to Arduino and other microcontrollers for real-time motion tracking and gesture detection.
Key Features
-
Combines 3-axis gyroscope and 3-axis accelerometer in one chip
-
Programmable accelerometer range: ±2g, ±4g, ±8g, ±16g
-
Gyroscope sensitivity: ±250, ±500, ±1000, ±2000 dps
-
Digital Motion Processor (DMP) for onboard MotionFusion and gesture recognition
-
I2C digital interface supports matrix, quaternion, Euler, and raw data formats
-
Embedded bias & compass calibration for improved accuracy
-
Compatible with Arduino and wearable electronics via I2Cdevlib
Specifications
-
Working Voltage: 3–5 V
-
Output: I2C digital (6/9-axis MotionFusion data)
-
Accelerometer: ±2g / ±4g / ±8g / ±16g programmable range
-
Gyroscope: ±250 / ±500 / ±1000 / ±2000 dps sensitivity
-
Data Format: Rotation matrix, quaternion, Euler angle, raw data
-
Dimensions: 14 × 21 mm
Applications
-
Robotics motion sensing
-
Arduino & DIY electronics projects
-
Human-Computer Interaction (HCI)
-
Wearable devices and gesture control
-
Navigation and balancing systems (e.g., Segway-type transporters)
-
Drone stabilization and motion tracking
Details



Sample Code
Please download the libraries for the all the IMU sensors first!
Related Collections




Explore More Drones & Accessories
-

Camera Drone
Our Camera Drone Collection features a wide range of brands including FIMI,...
-

Drone Accessories
Discover a wide range of drone accessories to enhance flight performance, extend...


