




MyActuator RMD-X12-320 Servo Actuator, High-Torque Integrated Motor with EtherCAT & CAN BUS, USB-CAN Adapter, 120Ω Resistor
MyActuator RMD-X12-320 Servo Actuator, High-Torque Integrated Motor with EtherCAT & CAN BUS, USB-CAN Adapter, 120Ω Resistor
MyActuator
Couldn't load pickup availability
Overview
The MyActuator RMD-X12-320 is a high-performance servo actuator designed for industrial robots, collaborative robots, and high-precision automation systems. It integrates a high-torque motor, planetary gearbox, and advanced driver electronics in a compact form factor, enabling seamless motion control and reliable EtherCAT or CAN BUS communication.
With its optimized design and rich interface options, the RMD-X12-320 provides exceptional efficiency, precise control, and flexibility for demanding robotic applications.
Key Features
-
Integrated design: Motor, driver, and reducer integrated into a single compact module.
-
High torque output: Ideal for heavy-duty robotic joints and automation systems.
-
Multiple communication protocols: Supports both EtherCAT and CAN BUS.
-
Precise feedback: High-resolution encoders for smooth motion and positioning.
-
Plug-and-play wiring: Clearly labeled cables and included adapters for quick setup.
-
Wide compatibility: Suitable for industrial robots, collaborative robots, AGVs, and automation arms.
Interface Description
| Port | Definition | Description |
|---|---|---|
| 1. EtherCAT_OUT | EtherCAT output | Communication output to other modules. |
| 2. EtherCAT_IN | EtherCAT input | Communication input from the master controller. |
| 3. VCC | Positive power supply | Main positive DC input. |
| 4. CAN_L | CAN bus low | CAN low signal for CAN communication. |
| 5. CAN_H | CAN bus high | CAN high signal for CAN communication. |
| 6. GND | Ground | Negative power terminal. |
| 7. T- / 8. T+ | Feedback lines | Module status feedback to the master station. |
| 9. R- / 10. R+ | Command lines | Control signals sent from the master station to the actuator. |
Included Accessories
| Label | Item | Description |
|---|---|---|
| A | Power Supply + CAN BUS Cable ×2 | Includes XT90 power supply connector with white (CAN_L), yellow (CAN_H), red (VCC), and black (GND) lines. |
| B | 120Ω Terminal Resistor ×1 | For CAN BUS termination. |
| C | EtherCAT Communication Cable ×2 | SH1.0mm 4-pin connectors for EtherCAT signal transmission and reception. |
| D | CAN BUS Communication Module ×1 | USB-to-CAN adapter for diagnostics and integration. Includes switchable 120Ω termination. |
Packaging Information
-
Box dimensions: 280 mm (Length) × 230 mm (Width) × 130 mm (Height)
-
Contents:
-
X12-320 Servo Actuator ×1
-
Power Supply + CAN BUS Communication Cable ×2
-
120Ω Terminal Resistance ×1
-
EtherCAT Communication Cable ×2
-
CAN BUS Communication Module ×1 (USB-CAN adapter)
-
Applications
-
Industrial robots and collaborative robots
-
AGVs (Automated Guided Vehicles) and AMRs (Autonomous Mobile Robots)
-
Robotic arms for automation and precision assembly
-
Research and development platforms requiring reliable motion control
Details
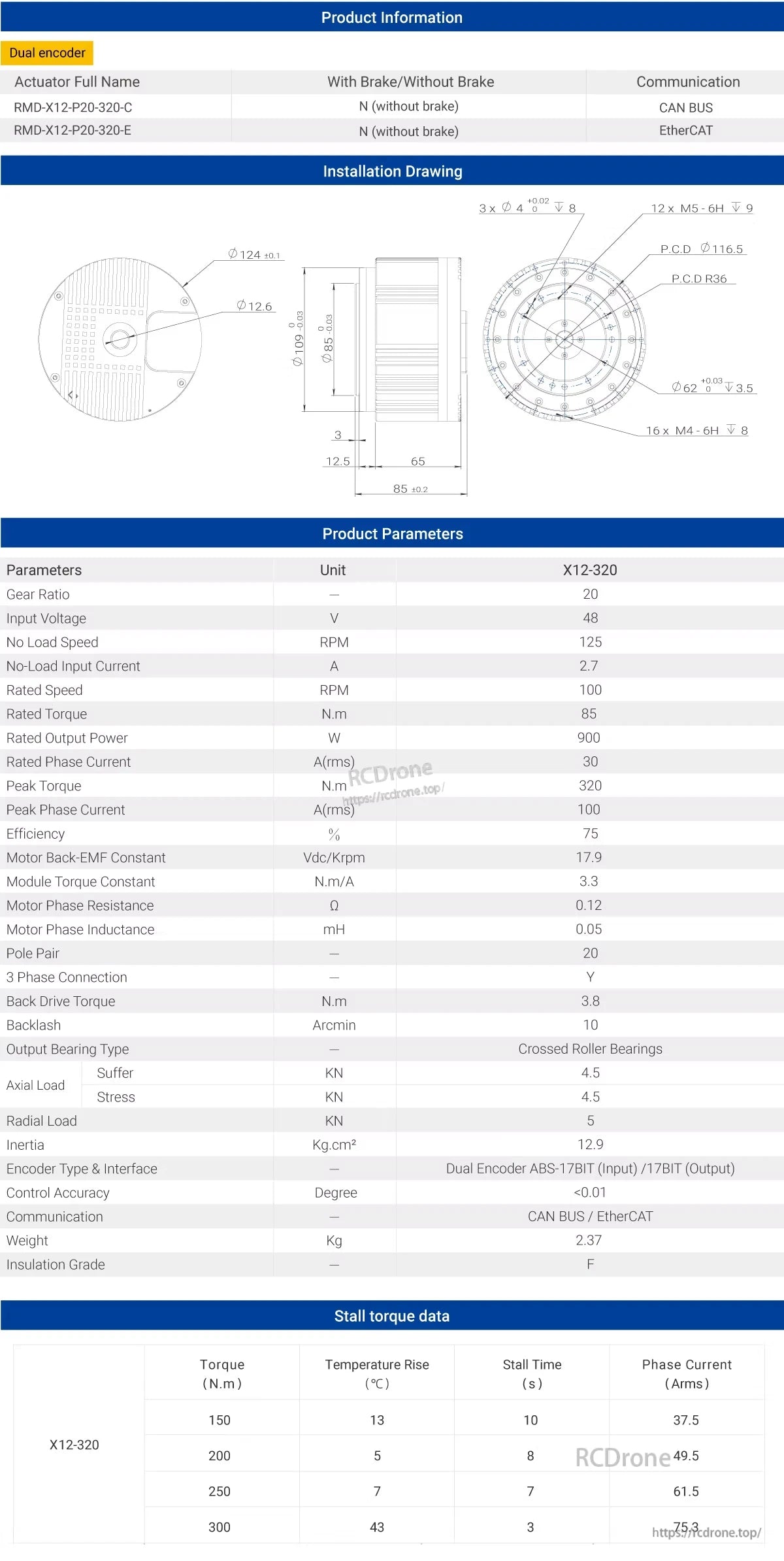
MyActuator RMD-X12-P20-320 servo actuator, dual encoder, 20 gear ratio, 48V input, 900W power, 85Nm rated torque, CAN BUS/EtherCAT communication, 2.37kg weight, crossed roller bearings, 12.9kg.cm² inertia.

Servo interface X12-320 supports EtherCAT, CAN bus, and power connections. Package: 280×230×130mm. Includes power supply, cables, resistors, and free USB-CAN adapter.

X12-320 accessories include power supply, CAN BUS, EtherCAT cables, and module details. Color-coded wires, connectors, and terminals ensure proper installation. Free USB-CAN adapter included per order.

RMD X12 320 Servo: 100μs response, dual encoder, EtherCAT/CAN, 320N.m torque, Ø124mm×85mm, for robotics and automation.

RMD-X12-P20-320-C servo motor: 48V input, 20:1 gear ratio, 900W peak power, dual 17-bit encoders, CAN BUS/EtherCAT, 2.37kg, with detailed dimensions.

X12-320L servo motor with power, CAN BUS, EtherCAT cables and 1200 terminator resistor.

Packaging display of MYACTUATOR servo, including CAN BUS cables and 120Ω resistor.
Related Collections




