





MyActuator RMD-X6-60 Dual Encoder Servo Actuator 320W 20N·m 60N·m Peak 48V EtherCAT CAN BUS High Precision Robotic Joint Motor
MyActuator RMD-X6-60 Dual Encoder Servo Actuator 320W 20N·m 60N·m Peak 48V EtherCAT CAN BUS High Precision Robotic Joint Motor
MyActuator
Couldn't load pickup availability
Overview
The MyActuator RMD-X6-60 intelligent servo actuator is a compact, high-performance integrated drive unit designed for robotics, automation, and precision motion control applications. Equipped with EtherCAT and CAN BUS communication interfaces and a dual encoder system, this actuator offers high torque density, precise control, and multi-mode motion management. It is ideal for robot joints, robotic arms, mobile robots, and industrial automation systems that require high precision and reliability.
Key Parameters:
-
Rated Power: 320W
-
Rated Torque: 20N·m
-
Peak Torque: 60N·m
-
Rated Speed: 153RPM
-
Gear Ratio: 19.612:1
-
Dual Encoder Precision: 17bit Input / 17bit Output
-
Communication Protocols: CAN BUS, EtherCAT
-
Input Voltage: 48V
Key Features
-
Dual Encoder Design
Integrated 17-bit input and output encoders provide precise feedback for accurate motion control and status monitoring. -
Multi-Protocol Support
Built-in EtherCAT and CAN BUS interfaces ensure broad compatibility with different robotic and automation control platforms. -
High Power Density and Torque
Capable of delivering 320W continuous power and 60N·m peak torque, meeting the demands of dynamic and heavy-load applications. -
Hybrid Control Modes
Supports position, speed, and torque hybrid control, allowing advanced multi-axis and coordinated motion systems. -
High-Precision Feedback and Fast Response
Integrated high-speed MCU and CAN processors provide millisecond-level response for precise control. -
Compact and Lightweight Design
Dimensions of 120mm × 120mm × 80mm and a weight of 0.82kg make it ideal for lightweight robotic applications where space and weight are critical.
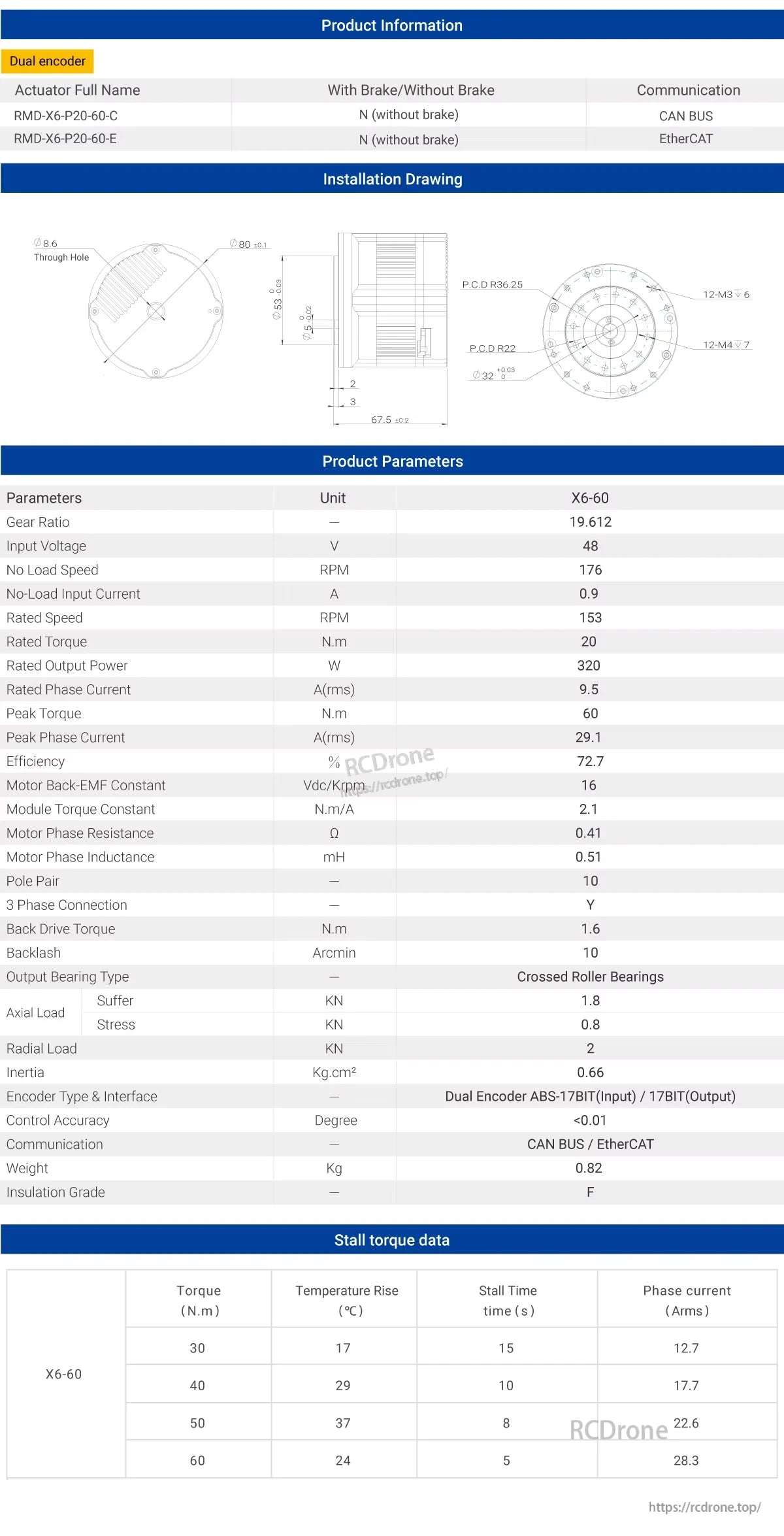
Technical Specifications
| Parameter | Value |
|---|---|
| Model | RMD-X6-P20-60-C |
| Input Voltage | 48V |
| Rated Power | 320W |
| Rated Torque | 20N·m |
| Peak Torque | 60N·m |
| Rated Speed | 153RPM |
| No-Load Speed | 176RPM |
| Rated Current | 9.5A (RMS) |
| No-Load Current | 0.9A |
| Peak Current | 29.1A (RMS) |
| Gear Ratio | 19.612:1 |
| Pole Pairs | 10 |
| Encoder Resolution | Input: 17bit / Output: 17bit |
| Weight | 0.82kg |
Interface Description
Power and Communication Ports
| Port | Description |
|---|---|
| EtherCAT_OUT | EtherCAT output port |
| EtherCAT_IN | EtherCAT input port |
| CAN_L | CAN Low signal terminal |
| CAN_H | CAN High signal terminal |
| GND | Negative power supply |
| VCC | Positive power supply |
Signal Terminals
-
R+/R-: Feedback data from module to master station
-
T+/T-: Control command signals from master station to module
Dimensions and Structure
-
Diameter: 120mm
-
Height: 80mm
-
Mounting Holes: P.C.D R26.25 and R22 with 12 × M4 threaded holes
-
Output Shaft: Standard flange interface for flexible coupling with external components
Packaging Information
| Included Items | Quantity |
|---|---|
| Power Supply + CAN BUS Communication Cable | 2 pcs |
| EtherCAT Communication Cable | 2 pcs |
| 120Ω Terminal Resistance | 1 pc |
| CAN BUS Communication Module (USB-CAN Adapter) | 1 pc |
Packaging Dimensions:
-
Length × Width × Height: 120mm × 120mm × 80mm
Accessories and Connections
Power Supply + CAN BUS Cable
-
Connector: XT30 (2+2)
-
White Line: CAN_L signal
-
Yellow Line: CAN_H signal
-
Red Line: VCC positive power supply
-
Black Line: GND negative power supply
EtherCAT Communication Cable
-
Connector: SH1.0mm (4-pin)
-
T line: EtherCAT communication signal transmission
-
R line: EtherCAT communication signal receiving
CAN BUS Module
-
Terminals: CAN_L, CAN_H, CAN_G, and switchable 120Ω termination (ON/OFF)
-
USB-CAN Adapter provided free with each order
Applications
-
Collaborative Robot Joints
-
Service and Humanoid Robots
-
Mobile Robot Steering or Drive Systems
-
Industrial Robotic Arms
-
High-Precision Motion Control Systems
-
Research and Educational Platforms
Summary
The MyActuator RMD-X6-60 actuator integrates high-precision dual encoders, EtherCAT and CAN BUS communication protocols, high torque density, and a compact form factor, making it a versatile and reliable solution for robotics and industrial automation. With its 320W power, 60N·m peak torque, and 17-bit high-resolution feedback, this servo actuator delivers exceptional performance and control accuracy for advanced robotics projects.
Details
The RMD-X6-60 servo actuator has a dual encoder, 19.612 gear ratio, 48V input, 320W power, CAN BUS/EtherCAT communication, 20 N.m rated torque, 60 N.m peak torque, and weighs 0.82 kg.
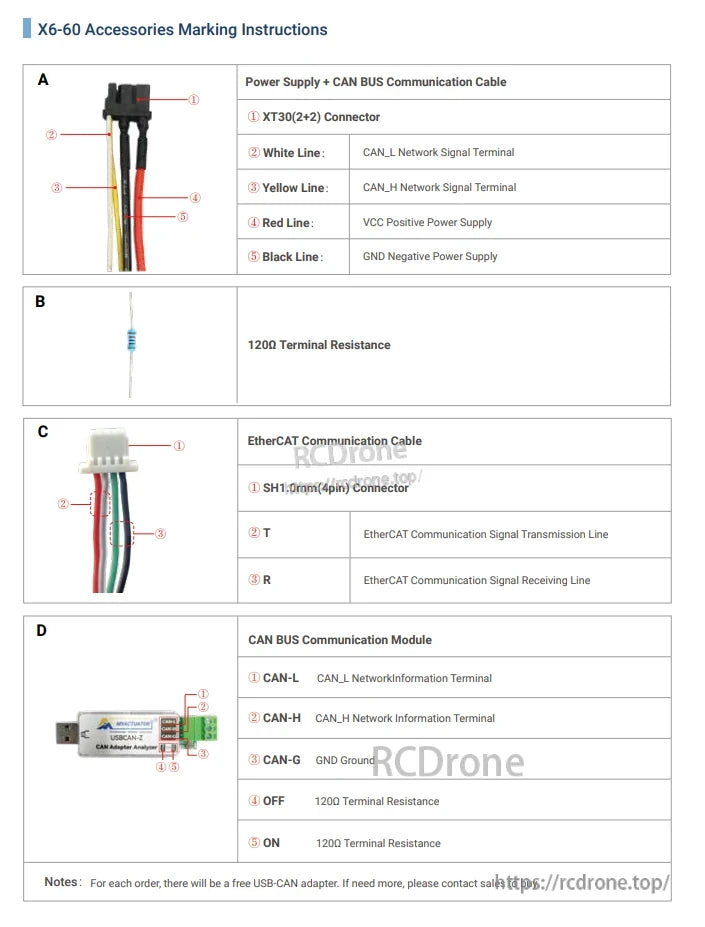
X6-60 accessories include power and CAN BUS cable with color-coded wires, 120Ω terminal resistance, EtherCAT cable with T/R lines, and a CAN BUS module with terminals for CAN-L, CAN-H, GND, and terminal resistance settings. A free USB-CAN adapter is included per order.

RMD-X6-P20-60-C servo actuator with EtherCAT+CAN BUS, 19.612 ratio, 48V input, 153RPM rated speed, 20Nm torque, 320W output, dual encoder, high-speed MCU and CAN chip, crossed roller bearing.
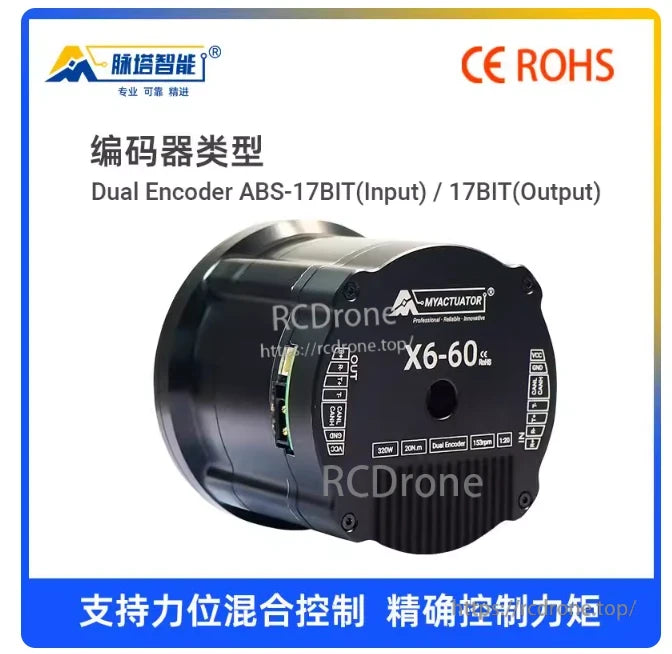
Dual Encoder ABS-17BIT Input/Output, X6-60 Servo Actuator, 300W, 20N.m, 128rpm, supports force-position hybrid control, precise torque control.
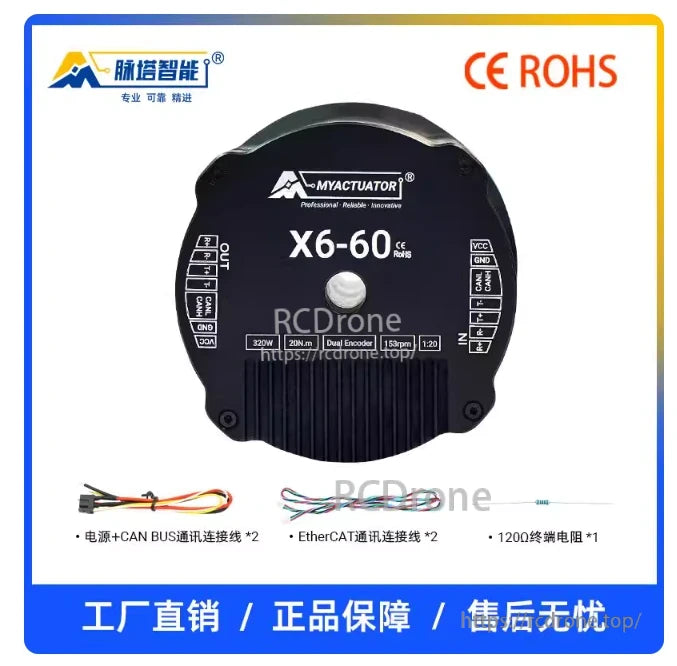
X6-60 servo actuator, 320W, 20N.m, dual encoder, 158rpm, 1:20 ratio, with CAN BUS and EtherCAT cables, 120Ω terminator, CE ROHS certified.

RMD-X6-60 Servo Actuator packaging with CAN BUS wiring, power cable, and 1200 termination resistor.
Related Collections






Explore More Drones & Accessories
-

Camera Drone
Our Camera Drone Collection features a wide range of brands including FIMI,...
-

Drone Accessories
Discover a wide range of drone accessories to enhance flight performance, extend...


