






Ti5 ROBOT CRA-RI40-52-PRO Motor Joint Module Motor 24-48V 90W 51/101 Ratio 16Bit Encoder
Ti5 ROBOT CRA-RI40-52-PRO Motor Joint Module Motor 24-48V 90W 51/101 Ratio 16Bit Encoder
Ti5 ROBOT
Couldn't load pickup availability
Overview
Ti5 ROBOT CRA-RI40-52-PRO Motor is a lightweight joint module motor for robotics joints. Highlight text includes: “LIGHTWEIGHT JOINT MODULE”, “Core hardware breakthrough key”, “Lightweight”, and “Small size, powerful performance”.
Key Features
Lightweight / small size
- Ultra-lightweight design with stronger usability.
- Reduction in weight by more than 1/3.
- Greatly reduces operating energy consumption.
Performance
- Industrial-grade performance standards.
- Torque density is twice that of similar products.
- Automotive-grade, anti-static, anti-vibration.
Modularization
- Six modules are integrated organically.
- Three series comprehensively adapt to customers in different scenarios.
- Greatly reduces production difficulty; improves production efficiency.
Structure (exploded view labels)
- Motor back cover
- Control board
- Encoder
- Stator housing
- Motor rotor
- Motor stator
- Harmonic reducers
- Flexspline Cover
Mass production / platform statements
- Industry-leading mass production advantage.
- All of the underlying hardware can be controlled, and the localization rate can reach 100%.
- Complete software toolchain for robot development, helping to accelerate research and development.
- Ti5 Robot Rapid Development Platform combines hardware and software, with an open source SDK mentioned for future availability.
Torque density comparison (Nm/kg)
- 250+: Ti5 Robot Next Generation
- 254: An American brand
- 192: Ti5 Robot mass production model
- 80.4: A Chinese brand
- 53.5: A Canadian brand
- 33.8: A Korean brand
Caption text: “Comparison of torque density of mainstream joint products (Nm/kg)”.
For selection guidance, documentation questions, or integration support, contact https://rcdrone.top/ or email support@rcdrone.top.
Applications
- Humanoid Robots
- Robotic Arms
- Exoskeletons
- Quadruped Robots
- AGV Vehicles
- ARU Robots
Specifications
| Parameter | Value |
|---|---|
| Motor Model | CRA-RI40-52-PRO-XX / CRA-RI40-52-PRO-XX-B |
| Reduction Ratio | 51 / 101 |
| Start-stop Peak Torque | 8.3 / 11 N.m |
| Maximum Allowable Average Load Torque | 5.5 / 8.9 N.m |
| 2000 Rpm/(Reduction Ratio) Rated Torque at this speed | 3.5 / 5 N·m |
| Output End Peak Rotational Speed | 118 / 59 RPM |
| Rated Speed | 80 / 40 RPM |
| Motor Power | 90 W |
| Supply Voltage | 24-48 V |
| Maximum Continuous Current | 3 A |
| Rated Current | 2 A |
| Encoder Resolution | 16 Bit |
| Back Clearance | 40 / 30 arcsec |
| Torque Constant | 0.05 N·m/A |
| Hole | 12 mm |
| Length: Without brake / With brake | 62 ±0.5 mm / 82 ±0.5 mm |
| Weight: Without brake / With brake | 0.32 kg / 0.42 kg |
| Inertia: Without brake / With brake | 73 g·cm² / 116.2 g·cm² |
Manuals
Details

Designed for compact robotics joints where low weight and high torque density matter most.

A modular internal layout combines motor, reducer, control board, and encoder in one integrated joint module.

Built on a scalable production platform with a development toolchain intended to speed up robot integration.

Component-level breakdown helps confirm what’s included inside the joint module for design and maintenance planning.
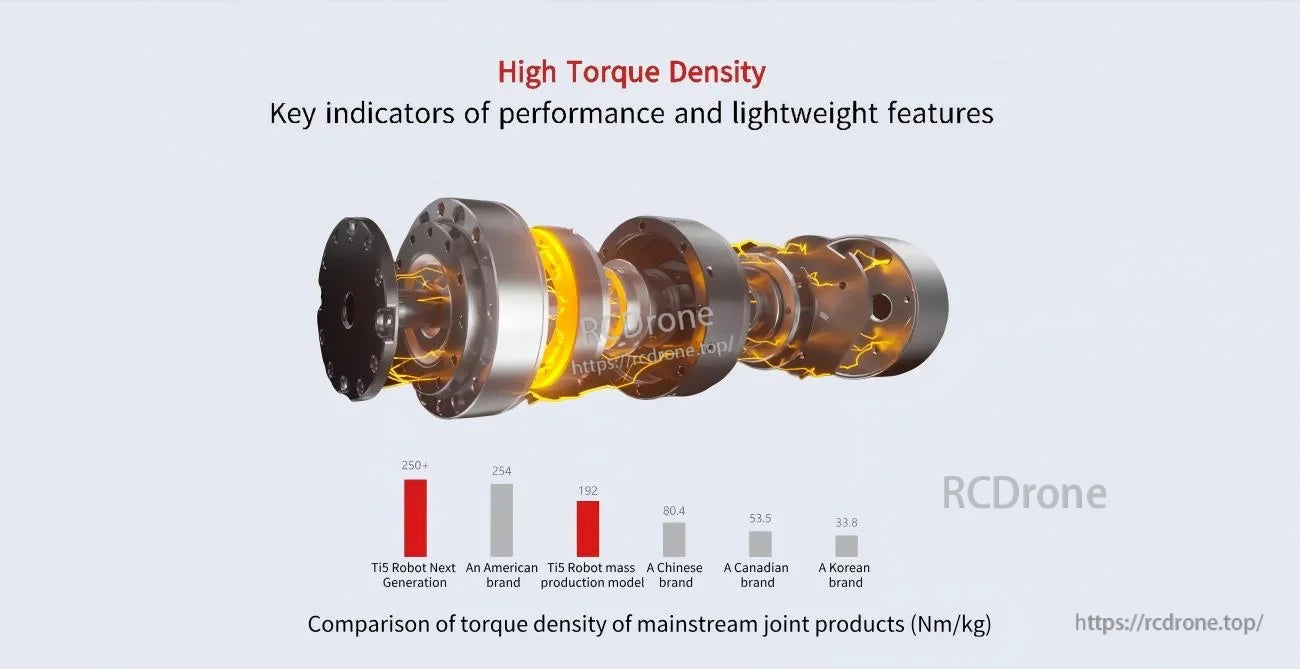
Torque density (Nm/kg) comparison provides quick context against other mainstream joint products.
Related Collections






