






CubeMars RI100 KV105 bürstenloser Innenläufer-Drehmomentmotor ohne Gehäuse für Cobot-Arm, Exoskelett, Roboterarm
CubeMars RI100 KV105 bürstenloser Innenläufer-Drehmomentmotor ohne Gehäuse für Cobot-Arm, Exoskelett, Roboterarm
CubeMars
Verfügbarkeit für Abholungen konnte nicht geladen werden
Übersicht
Der CubeMars RI100 KV105 rahmenlose Inrunner-Drehmomentmotor ist ein Hochleistungs-BLDC-Motor, der für Präzisionsanwendungen wie Cobot-Arme, Exoskelette, beinigte Roboter und Roboterarme entwickelt wurde. Er arbeitet mit 12V–48V und liefert bis zu 4,95 Nm Spitzenmoment, während er kompakte Abmessungen und ein niedriges Ruckmoment für sanfte und präzise Bewegungssteuerung beibehält. Mit einer rahmenlosen Inrunner-Struktur bietet er herausragende Drehmomentdichte, thermische Stabilität und Flexibilität für maßgeschneiderte Integration in engen oder leichten Roboterstrukturen.
Hauptmerkmale
-
Breiter Spannungsbereich: Kompatibel mit 24V-, 36V- und 48V-Stromversorgungen.
-
Hohe Präzisionskontrolle: Unterstützt Encoder-Auflösungen von bis zu 0.01°, kompatibel mit Renishaw und Sick Encodern.
-
Niedriges Ruckmoment: Ermöglicht eine sanftere Rotation und geringes Geräusch—ideal für dynamische Robotergelenke.
-
Gekrümmter Permanentmagnet-Rotor: Optimiert für BEMF sinusoidale Ansteuerung, was eine bessere Reaktionsfähigkeit und Effizienz gewährleistet.
-
Handgewickelter Stator: 0,5 mm Spiel und hoher Füllfaktor für hohe Drehmomentabgabe und niedrige Trägheit (215,5 g·cm²).
-
Hohe thermische Toleranz: Unterstützt Arbeitsumgebungen von -40°C bis 85°C (Umgebungsmotorstruktur getestet von -20°C bis 50°C).
-
Leicht und kompakt: Nur 500g mit einem maximalen Drehmoment-Gewichts-Verhältnis von 9,9 Nm/kg.
Technische Daten
Allgemeine Parameter
| Parameter | Wert |
|---|---|
| Anwendung | Cobot Arm / Exoskelett |
| Motortyp | Rahmenloser Inrunner BLDC |
| Phase | 3 |
| Wicklungstyp | Delta |
| Polpaare | 14 |
| Gewicht | 500g |
| Drehmoment-Gewichts-Verhältnis | 9.9 Nm/kg |
Elektrische Eigenschaften
| Parameter | Wert |
|---|---|
| Nennspannung (V) | 24 / 36 / 48 |
| Nennmoment (Nm) | 1.76 |
| Spitzenmoment (Nm) | 4.95 |
| Nennumdrehungen (rpm) | 1370 / 2100 / 2825 |
| Leerlaufdrehzahl (rpm) | 2184 / 3276 / 4368 |
| Nennstrom (ADC) | 13.6 |
| Spitzenstrom (ADC) | 38.6 |
| Kv (rpm/V) | 105 |
| Kt (Nm/A) | 0.129 |
| Ke (V/krpm) | 10.47 |
| Km (Nm/√W) | 0.3634 |
| Widerstand (mΩ) | 126 |
| Induktivität (µH) | 366.7 |
| Mechanische Zeitkonstante (ms) | 0.16 |
| Elektrische Zeitkonstante (ms) | 2.91 |
| Trägheit (g·cm²) | 215.5 |
Steckerbelegung
| Signal | Kabelspezifikation |
|---|---|
| U | Schwarz + 16# Silikonleitung |
| V | Gelb + 16# Silikonleitung |
| W | Rot + 16# Silikonleitung |
| Hu | Gelb + 30# Silikonleitung |
| Hv | Grün + 30# Silikonleitung |
| Hw | Blau + 30# Silikonleitung |
| VCC GND | Rot + 30# & Schwarz + 30# Leitungen |
Verdrahtungszuordnung: Hu-U, Hv-V, Hw-W
Zusätzliche Highlights
RI100 Rotor Erhöhte Version: Rotorhöhe um 2mm erhöht, um die Kompatibilität mit Hall-Sensoren zu verbessern.
-
Handaufzugsexzellenz: Präzisionsgewickelte Kupferspulen mit 0,5 mm Abstand für eine bessere Montage und hohe Drehmomentdichte.
-
Gekrümmter Permanentmagnet-Rotor: Gewährleistet verbesserte BEMF-Eigenschaften für eine bessere sinusförmige Steuerung.
-
Benutzerdefinierte Encoder-Optionen: Unterstützt eine Vielzahl von hochpräzisen Encodern, einschließlich Renishaw und Sick.
-
Optimierte Zahnradverzahnung: Entwickelt mit niedrigem Ruckmoment und hervorragender Getriebedynamik, um geräuscharm, reibungslos und stark beschleunigend zu gewährleisten.
Anwendungen
-
Kollaborative Roboterarme (Cobot)
-
Tragbare robotische Exoskelette
-
Bein- / vierbeinige Roboter
-
Präzisionsrobotergelenke und Endeffektoren
-
Kompakte Automatisierungs- und Inspektionssysteme
Manuelle Downloads
Details
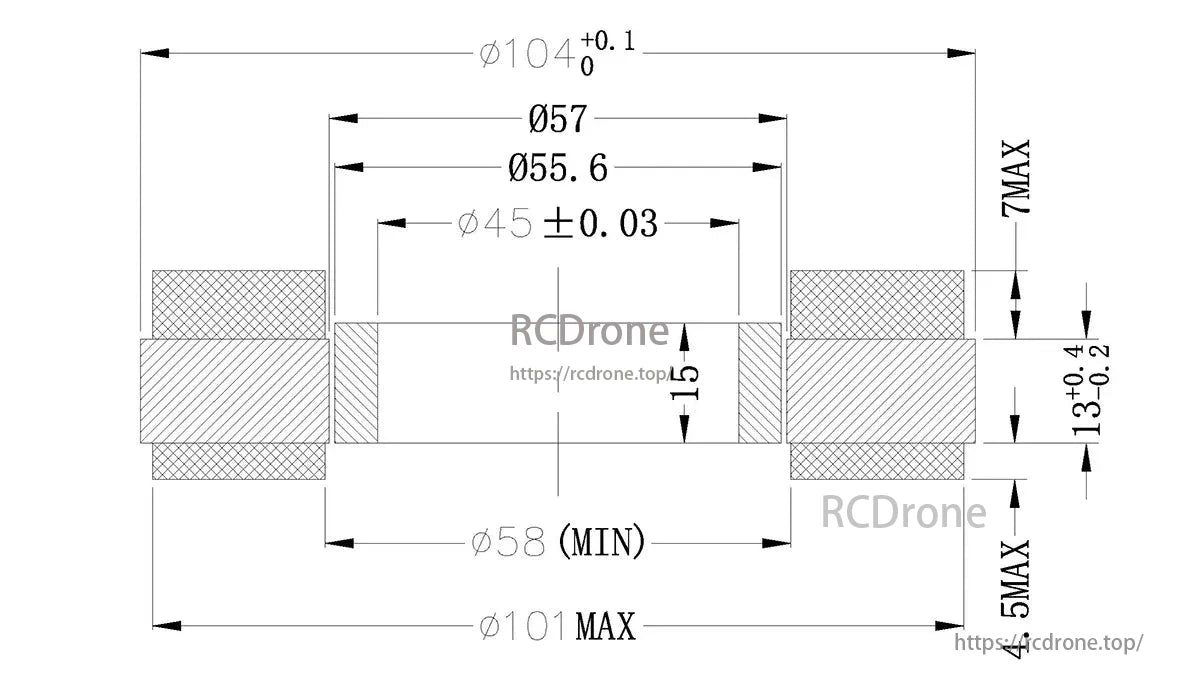
CubeMars RI100 Drehmomentmotor Abmessungen: Ø104, Ø57, Ø55.6, Ø45, 15mm, Ø58, Ø101.
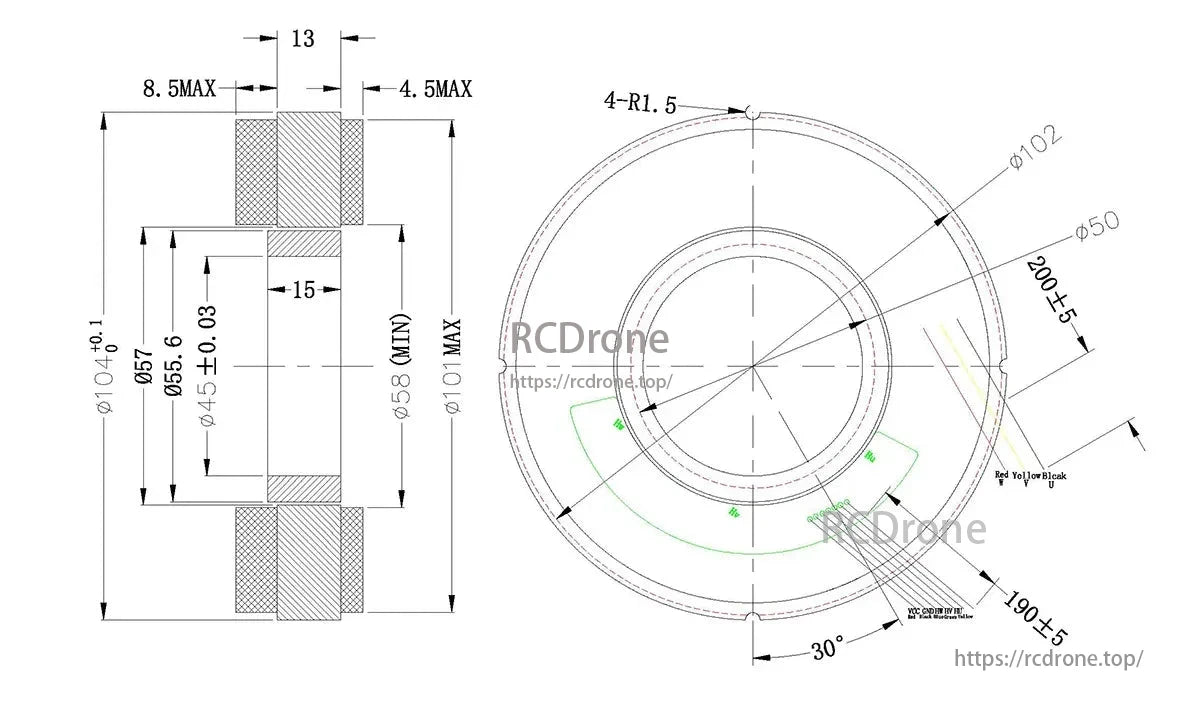
Drehmomentmotor Abmessungen: Ø104, Ø57, Ø55.6, Ø45±0.03, Ø58, Ø101 max, 200±5, 190±5, 30° Winkel, 4-R1.5 Merkmale.
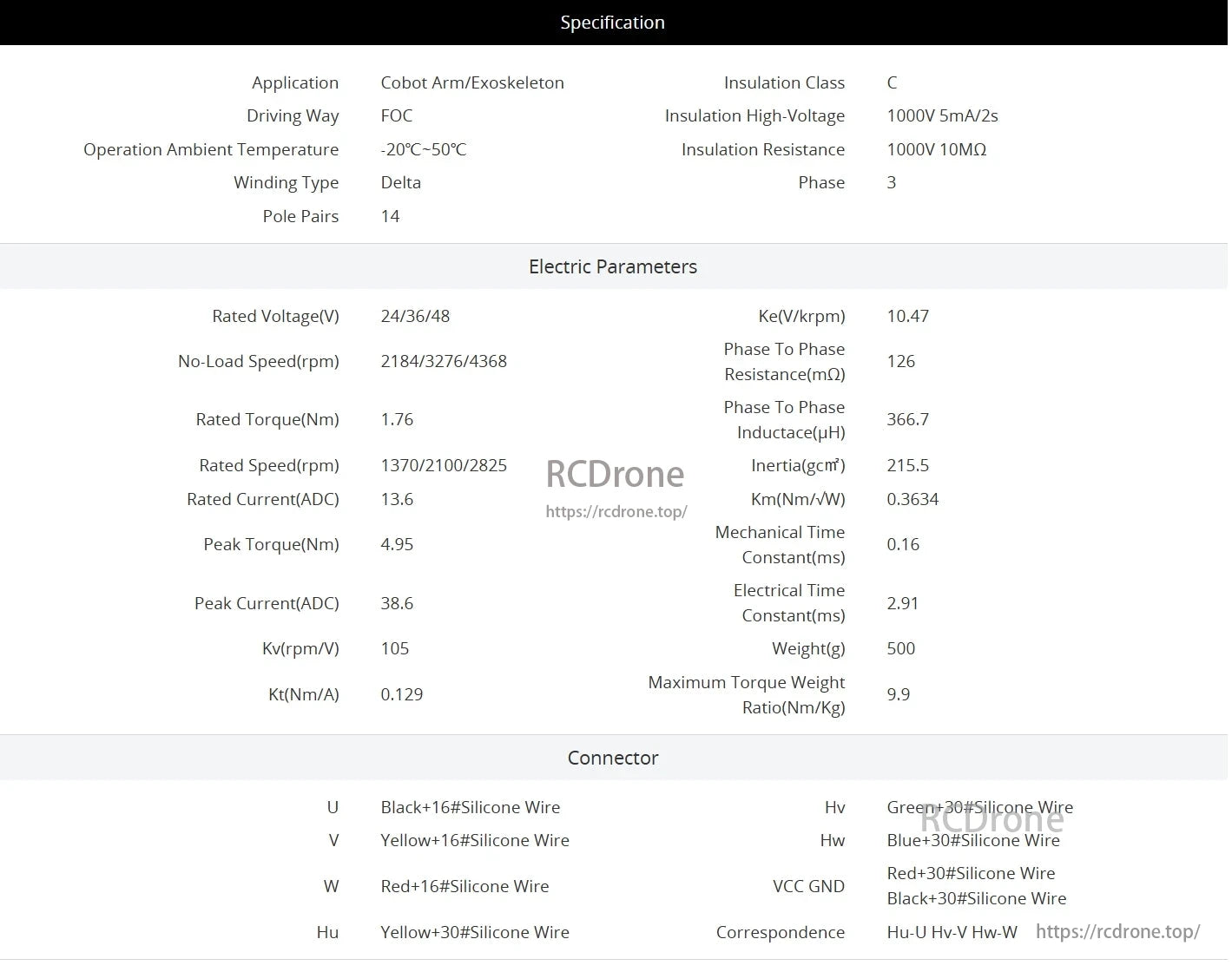
CubeMars RI100 Drehmomentmotor: 24/36/48V, 1.76Nm Drehmoment, 1370/2100/2825rpm, 13.6A Strom, 38.6A Spitze, 10.47V/krpm, 366.7μH Induktivität, 215.5gcm² Trägheit, 9.9Nm/Kg max Drehmoment-Gewichtsverhältnis, -20°C bis 50°C Betrieb.

CubeMars RI100 KV105@24VDC analAnalyse-Diagramm. Zeigt Drehmoment (N.m) vs. Ausgangsleistung (W), Effizienz, Strom (A) und Geschwindigkeit (RPM). Das Diagramm hebt die Leistungsmerkmale des Motors unter verschiedenen Lasten hervor.
CubeMars RI100 Drehmomentmotor: Geringeres Ruckmoment, sanfter Lauf, geringe Geräuschentwicklung, starke Dynamik.
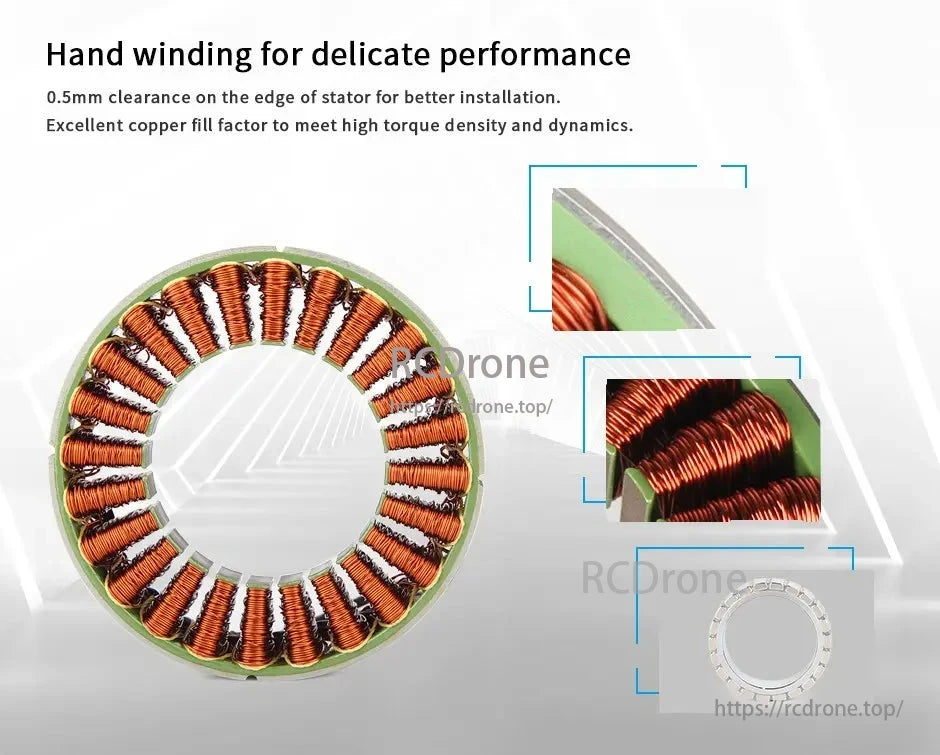
Handgewickelter Stator mit 0,5 mm Spiel für optimale Leistung.

RI100 Rotor erhöhte Version. Gesamthöhe um 2 mm erhöht für verbesserte Hall-Sensor-Erfassung.
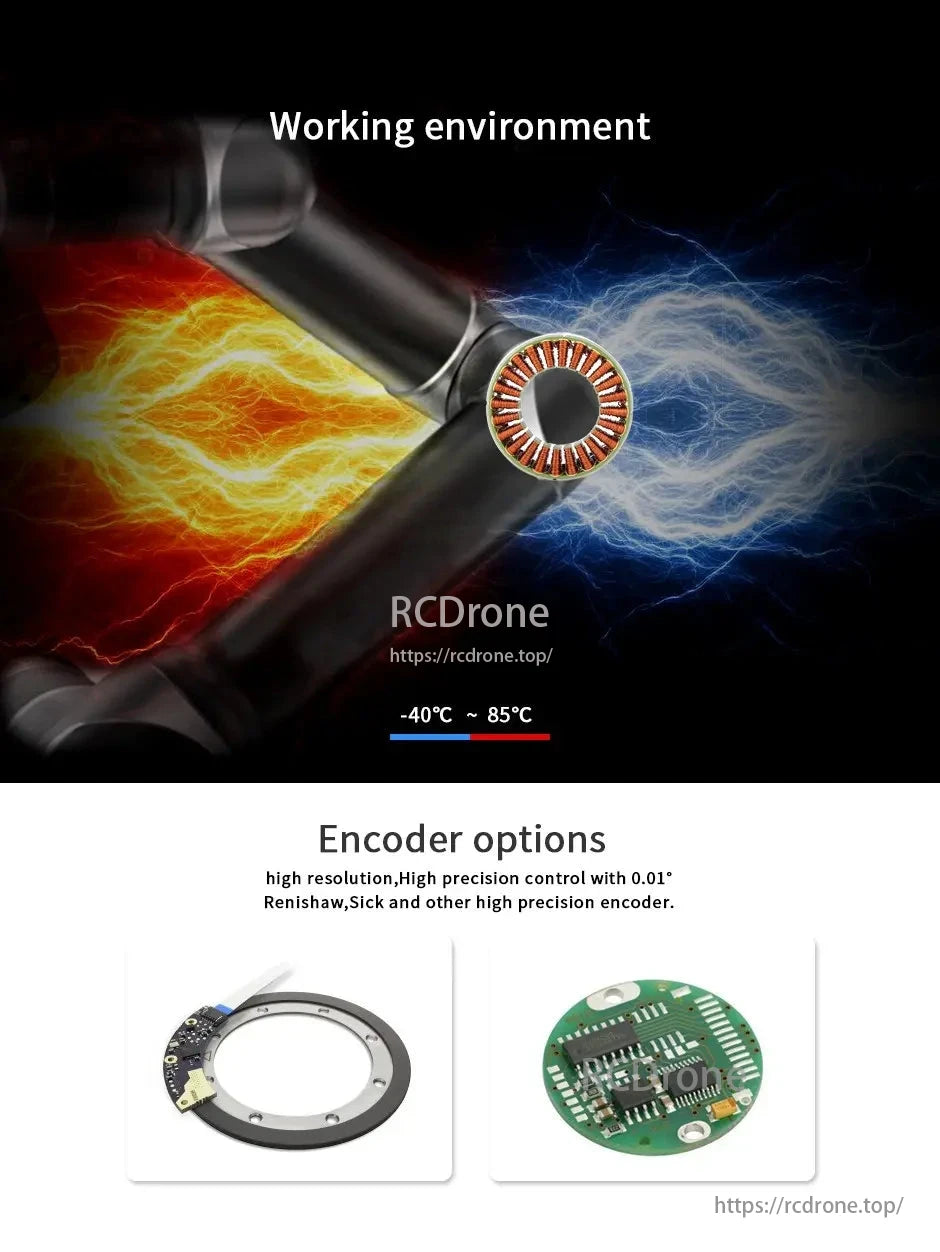
CubeMars RI100 Drehmomentmotor: -40°C bis 85°C, hochpräzise Encoder-Optionen.
Related Collections







Entdecken Sie mehr Drohnen und Zubehör
-

Kameradrohne
Unsere Kamera-Drohnen-Kollektion bietet eine breite Palette von Marken, darunter FIMI, JJRC, SJRC,...
-

FPV -Drohne
Entdecken Sie unsere komplette FPV-Drohnenkollektion mit Racing-, Freestyle-, Long Range-, Cinewhoop- und...
-

Drohnenzubehör
Entdecken Sie eine große Auswahl an Drohnenzubehör, um die Flugleistung zu verbessern,...


