













Holybro Pixhawk Jetson Baseboard-Bundle mit 6X / 6X Pro und NVIDIA Jetson
Holybro Pixhawk Jetson Baseboard-Bundle mit 6X / 6X Pro und NVIDIA Jetson
HolyBro
Verfügbarkeit für Abholungen konnte nicht geladen werden
Überblick
Der Holybro Pixhawk Jetson-Grundplatte basiert auf der Open-Source-Spezifikation für Pixhawk Autopilot Bus (PAB) und integriert sich nahtlos in die NVIDIA Jetson Orin NX/Nano-Trägerplatine. Der PAB-Formfaktor ermöglicht die Kompatibilität mit jedem PAB-Flugcontroller, einschließlich der Pixhawk 6XDieses Board vereint die Rechenleistung von NVIDIA Jetson mit den Flugsteuerungsfunktionen von Pixhawk, wodurch es ideal für fortgeschrittene autonome Anwendungen ist.
Hauptmerkmale
-
Einheitliches System: Mähdrescher Pixhawk Und NVIDIA Jetson auf einer einzigen Platine.
-
Nahtlose Konnektivität: Jetson und Pixhawk kommunizieren über UART-, CAN- und Ethernet-Switch.
-
Breite Kompatibilität: Unterstützt Jetson Orin NX und Orin Nano.
-
Hochgeschwindigkeitserweiterung: Merkmale 2x M.2-Schlüsselsteckplätze für WLAN/Bluetooth und NVMe-SSD.
-
Pixhawk 6X-Integration: ausgestattet mit ICM-45686-Sensoren für eine verbesserte Flugkontrolle.
Prozessoren & Sensoren
FMU-Prozessor:
-
STM32H753
-
32-Bit ARM Cortex-M7, 480 MHz
-
2 MB Flash-Speicher, 1 MB RAM
IO-Prozessor:
-
STM32F103
-
32-Bit ARM Cortex-M3, 72 MHz
-
64 KB SRAM
Integrierte Sensoren (Rev8)
-
Beschleunigungsmesser/Gyro: 3-fach ICM-45686 (mit BalancedGyro™-Technologie)
-
Barometer: ICP20100 und BMP388
-
Magnetometer: BMM150
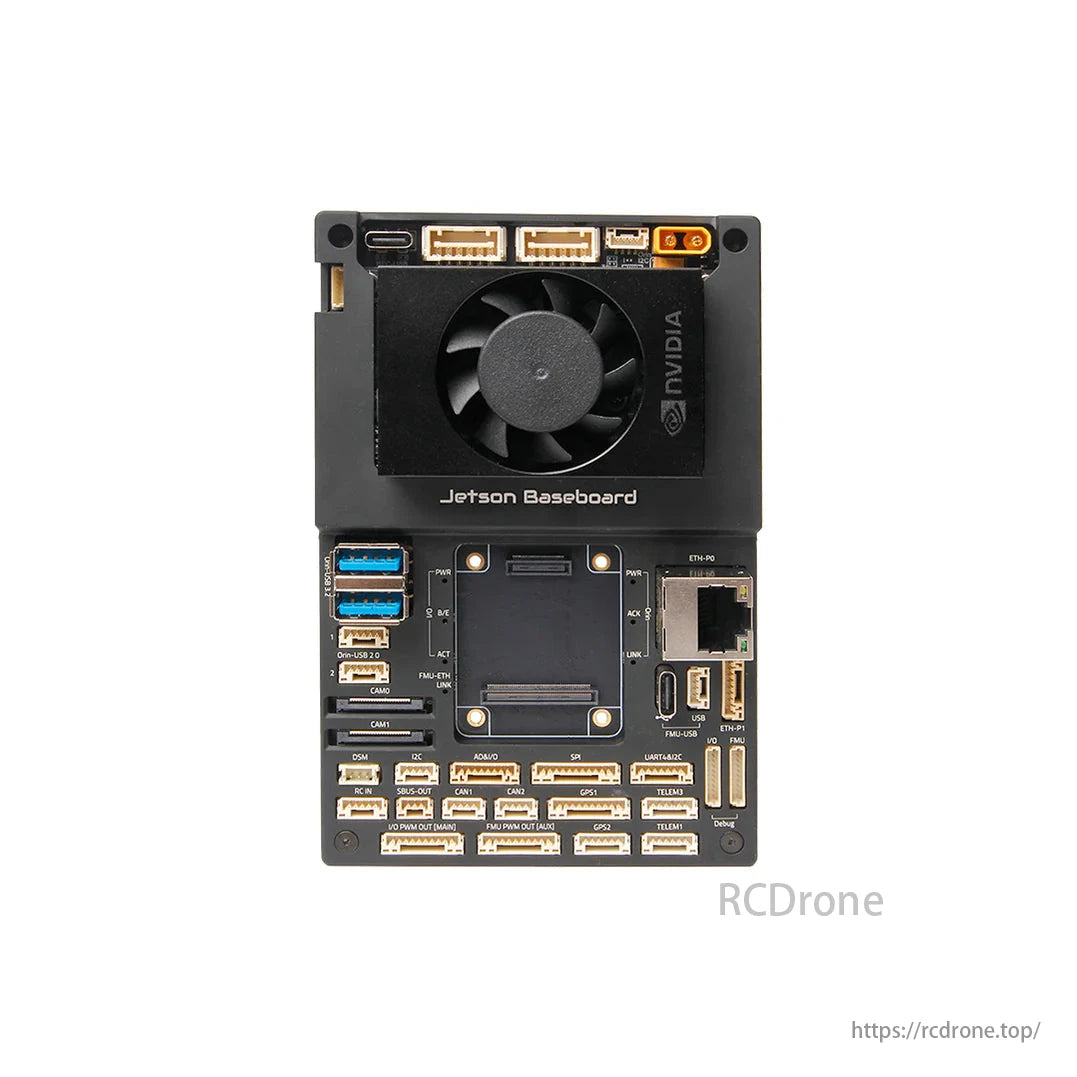
Baseboard-Anschlüsse und Konnektivität
Jetson-Anschlüsse
-
2x Gigabit-Ethernet-Ports (Verbunden mit Jetson & Autopilot über RTL8367S Ethernet-Switch)
-
2x MIPI CSI-Kameraeingänge (jeweils 4 Spuren, 22-poliges Raspberry Pi Cam FFC)
-
2x USB 3.0-Host-Anschlüsse (USB-A, 5A Strombegrenzung)
-
2x USB 2.0 Host-Ports (5-poliger JST-GH)
-
USB 2.0 zum Debuggen (USB-C)
-
Mini-HDMI-Ausgang
-
2x M.2-Steckplätze:
-
Schlüssel M (2242) für NVMe SSD (PCIEx4)
-
Taste E (2230) für WiFi/BT (PCIEx2, UART, USB, I2S)
-
-
CAN-Anschluss (Verbunden mit Autopilot CAN2, 4-poliger JST-GH)
-
SPI-, I2C-, I2S-, UART-Anschlüsse (Verschiedene JST-GH-Anschlüsse)
-
Stromanschluss für den Lüfter
-
Leistungsaufnahme: XT30-Anschluss, 7–21 V (3S–4S)
-
UBEC 12A (3-14S) Empfohlen für >4S Anwendungen
Autopilot-Anschlüsse
-
Pixhawk Autopilot-Bus-Schnittstelle: 100-poliger und 50-poliger Hirose DF40
-
Redundante digitale Leistungsmodul-Eingänge
-
Unterstützung für I2C-Leistungsmonitor
-
GPS- und Sicherheitsschalteranschlüsse: 10-poliger und 6-poliger JST-GH
-
2x CAN-Anschlüsse (4-poliger JST-GH)
-
3x Telemetrie-Ports (JST-GH, einer mit Jetsons UART1 verbunden)
-
16 PWM-Ausgänge (2x 10-Pin JST-GH)
-
USB 2.0 (USB-C und 4-poliger JST-GH)
-
DSM-Eingang (3-poliger JST-ZH, 1,5 mm Abstand)
-
RC-Eingang (PPM/SBUS, 5-poliger JST-GH)
-
SPI-Anschluss für externen Sensorbus (SPI5, 11-poliger JST-GH)
-
2x Debug-Ports (FMU & IO, 10-poliger JST-SH)
Leistungsbedarf
-
Eingangsspannung: 7-21 V (3S-4S) über XT30-Anschluss
-
Mindeststrombedarf: 8 V/3 A (variiert je nach Peripheriegeräten)
-
Unterstützt externes UBEC 12A (3-14S) für Redundanz und Anwendungen mit höherer Spannung
-
Eingebauter Überspannungsschutz
Abmessungen und Gewicht
-
Brettgröße: 126 x 80 x 38 mm (ohne Jetson und Flugsteuerung)
-
Gewicht: 203.2 g (Einschließlich Jetson, Kühlkörper, Flugsteuerung, SSD, Wi-Fi-Modul)
UBEC-12A Spezifikationen
-
Eingangsspannung: 3 bis 14 Sekunden (XT30)
-
Ausgangsspannung: 6,0 V/7,2 V/8,0 V/9,2 V (7,2 V empfohlen für Jetson)
-
Dauerhafter Ausgangsstrom: 12A
-
Burst-Ausgangsstrom: 24A
-
Größe: 48 x 33,6 x 16,3 mm
-
Gewicht: 47,8 g
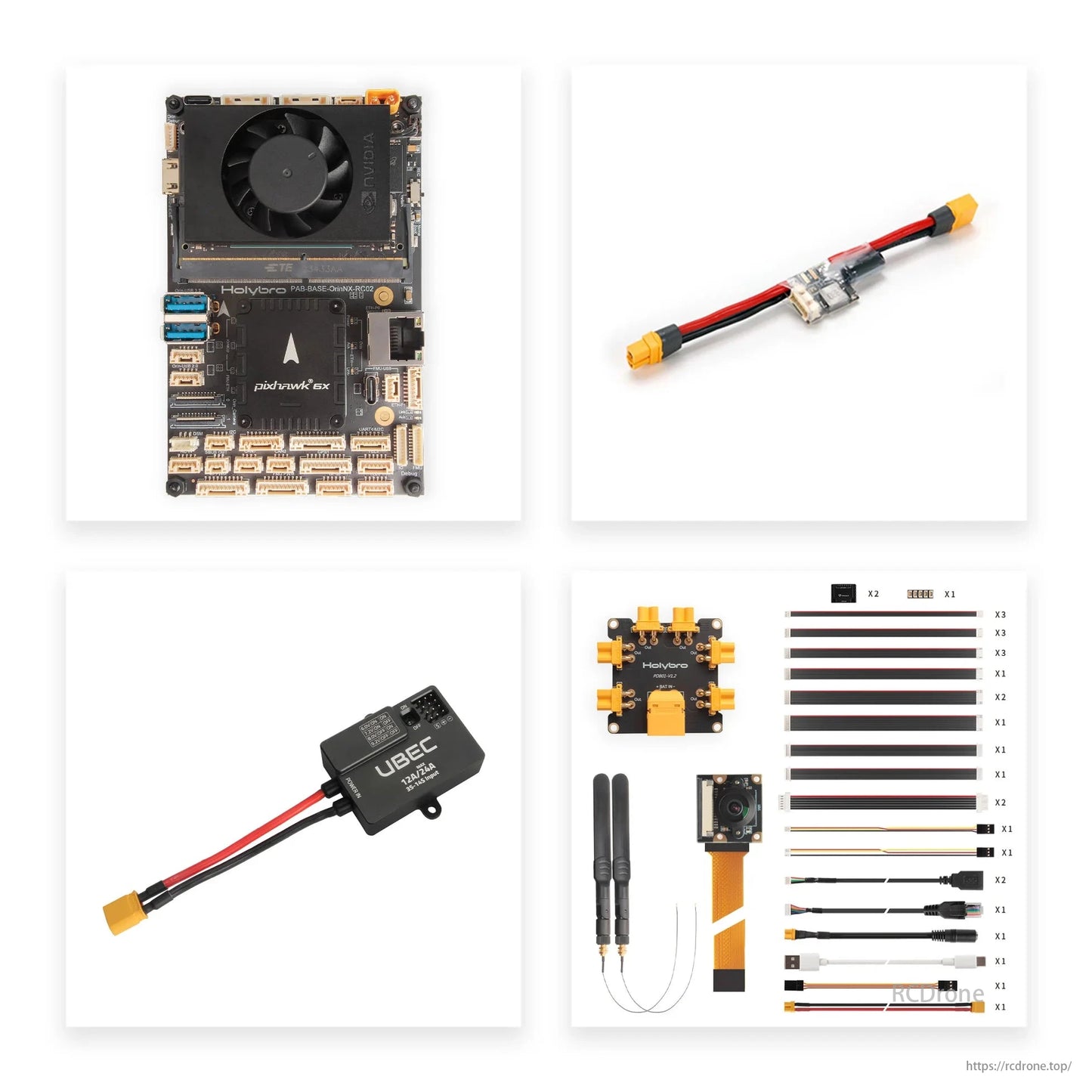
Packungsinhalt
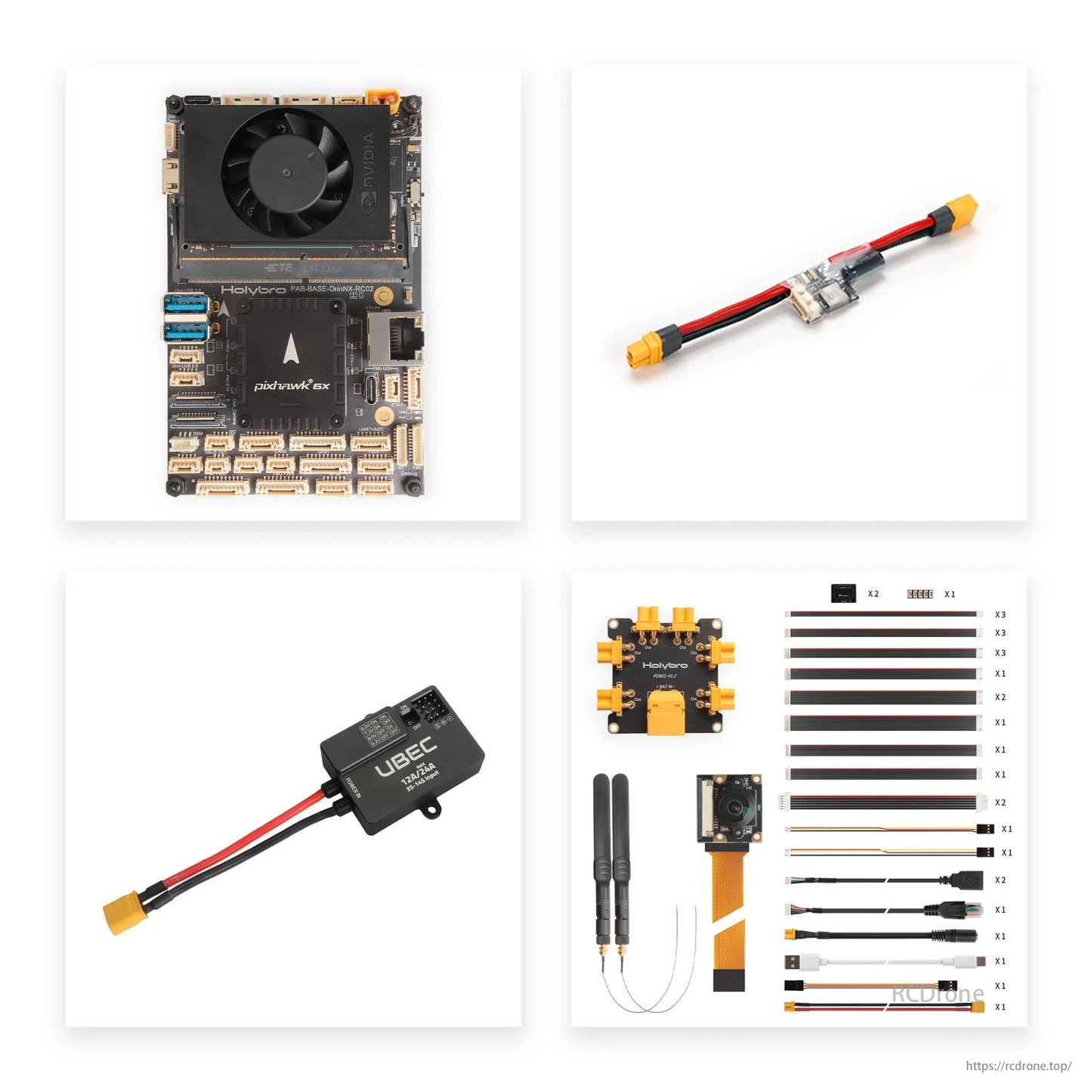
Pixhawk 6X-Paket
-
Pixhawk 6X (ICM-45686) Flugsteuerungsmodul
-
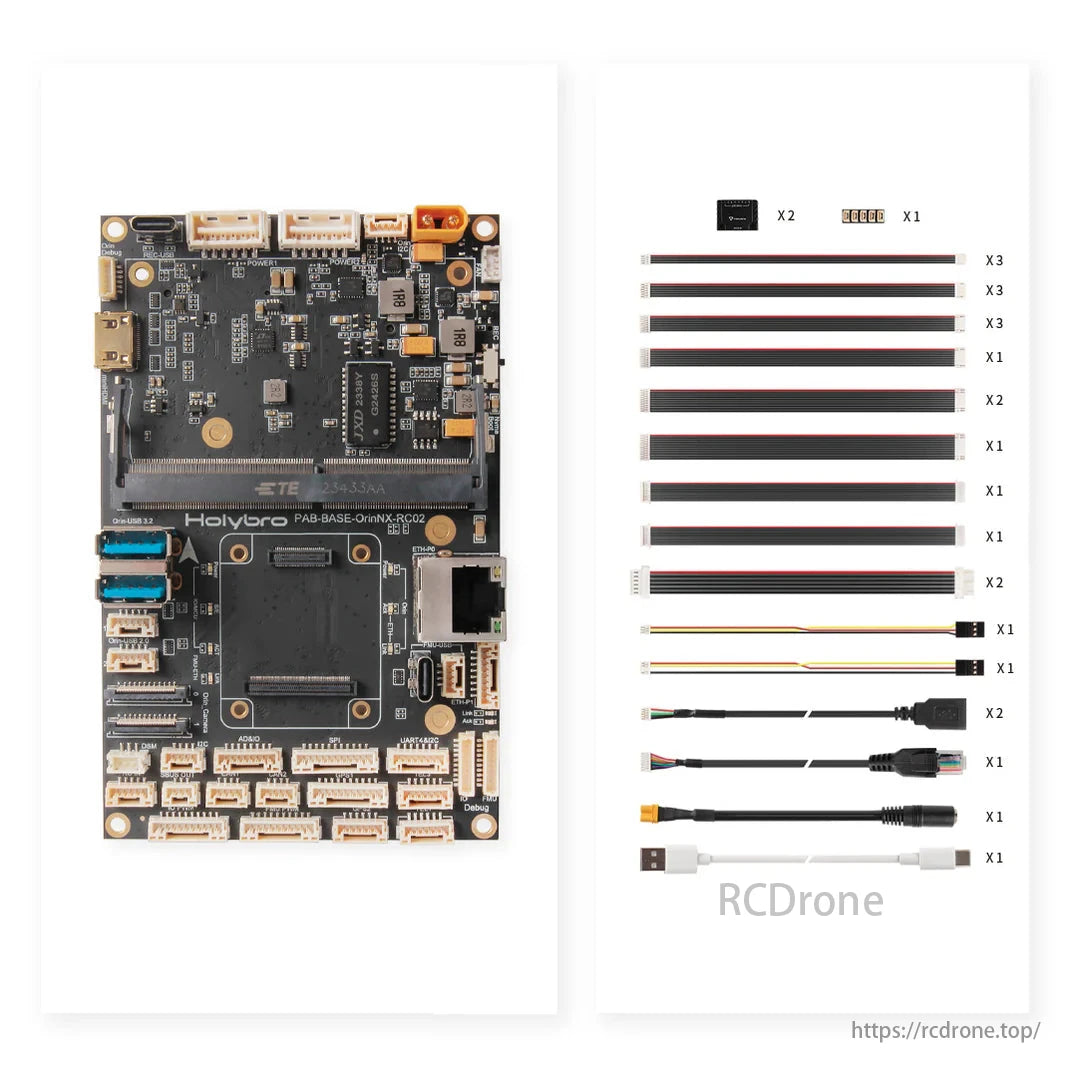
Pixhawk Jetson Orin Grundplatte
-
Nvidia Orin NX (16 GB RAM) / Orin Nano (4 GB RAM) mit Kühlkörper und Lüfter
-
SSD: Samsung PM9B1 PCIe 4.0 NVMe 512 GB
-
Wi-Fi- und Bluetooth-Modul: Intel 8265NGW AC Dual Band / Realtek RTL8B22CE
-
Kamera: IMX219-200
-
Leistungsmodul PM02D
-
UBEC 12A (3-14S)
-
PDB-Platine und Kabelsatz
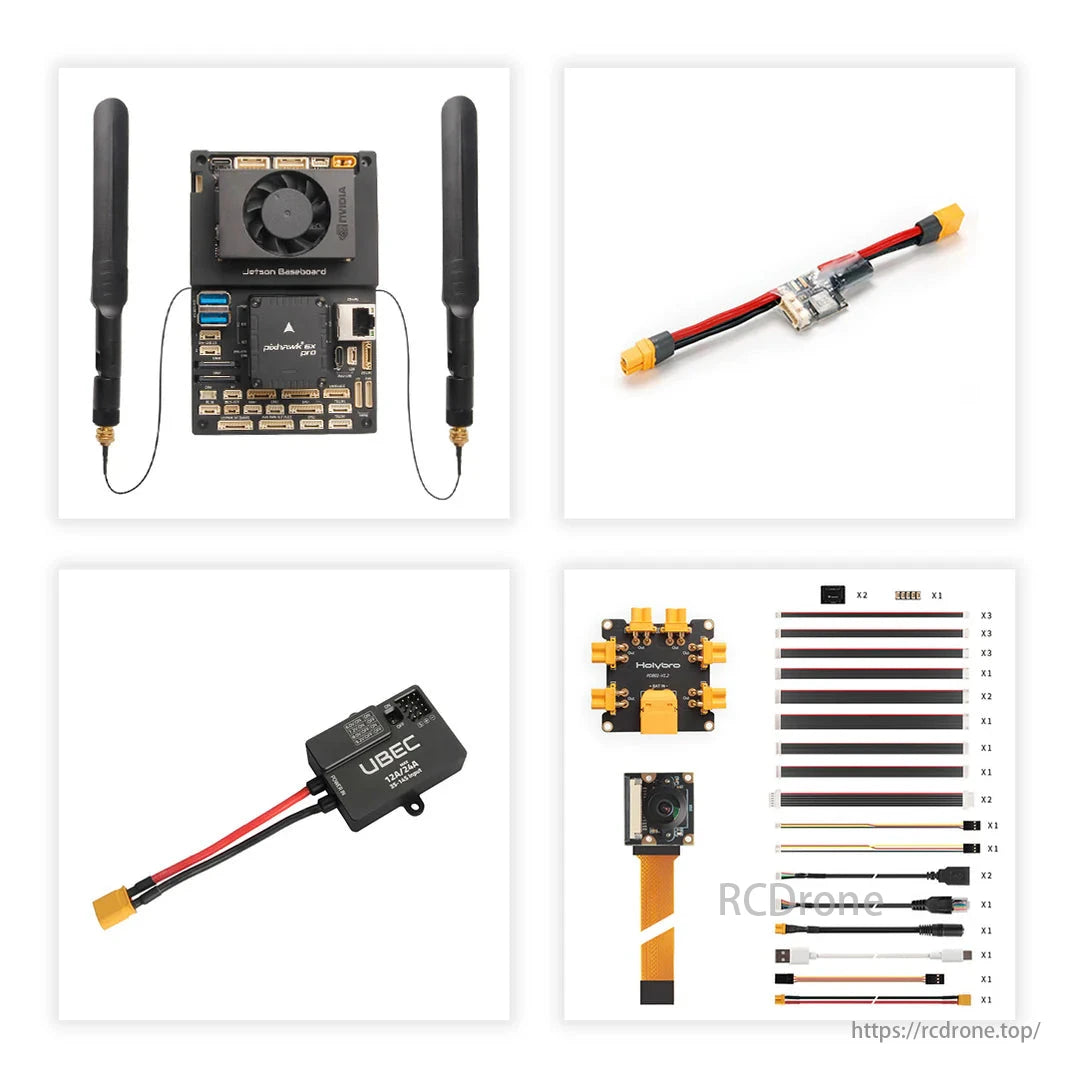
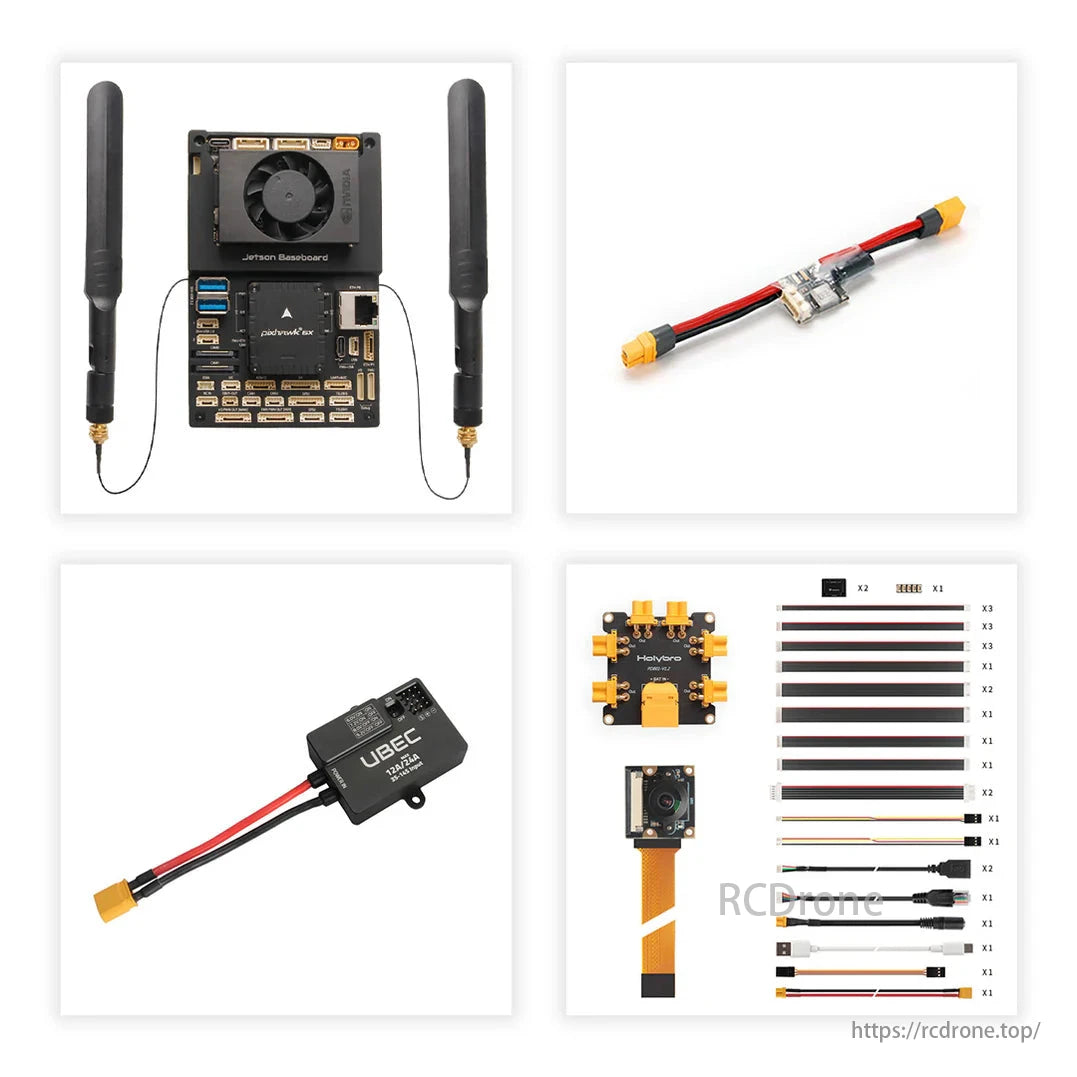
Pixhawk 6X Pro Bundle
-
Pixhawk 6X Pro Flugsteuerungsmodul
-
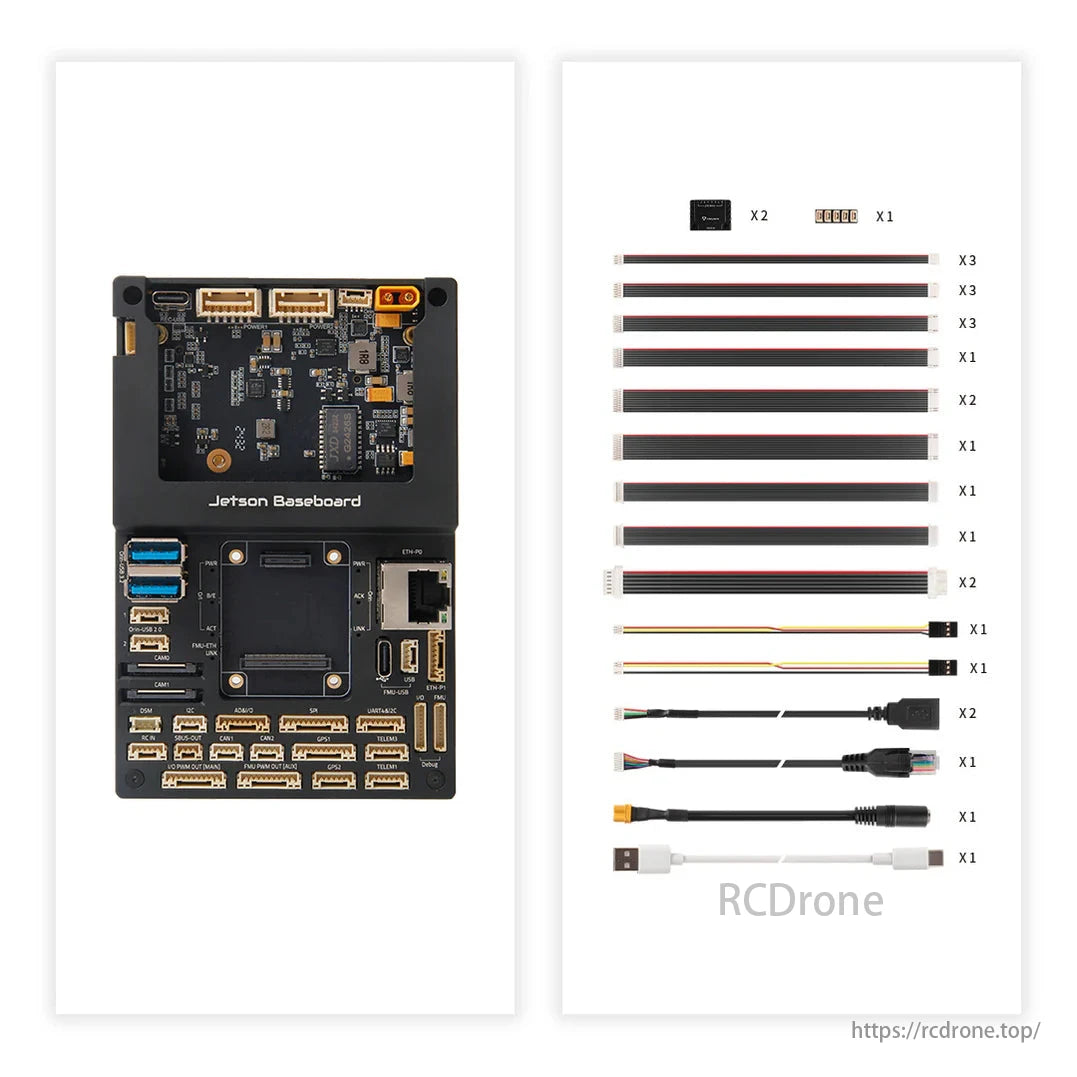
Pixhawk Jetson Orin Baseboard (mit oder ohne Gehäuse)
-
Nvidia Orin NX (16 GB RAM) / Orin Nano (4 GB RAM) mit Kühlkörper und Lüfter
-
SSD, Wi-Fi/Bluetooth-Modul, Kamera, PM02D-Stromversorgungsmodul, UBEC 12A, PDB-Platine, Kabelsatz
Nur Jetson Baseboard
-
Pixhawk Jetson Orin Baseboard (mit oder ohne Gehäuse)
-
Kabelsatz
Referenzlinks
Standard-Anmeldeinformationen für Jetson Orin:
-
AUSWEIS:
heiliger Bruder -
Passwort:
123
Details




Pixhawk und Nvidia Jetson auf einer einzigen Platine vereint.

Nvidia Jetson über UART-CAN und Ethernet-Switch mit RJ45-Anschluss für Autopilotsysteme verbunden
Pixhawk Autopilot Bus (PAB) Open Source-Spezifikation

Vollständig kompatibel mit Jetson SoDIMM-Anschlusssystem: Jetson Orin NX/Nano

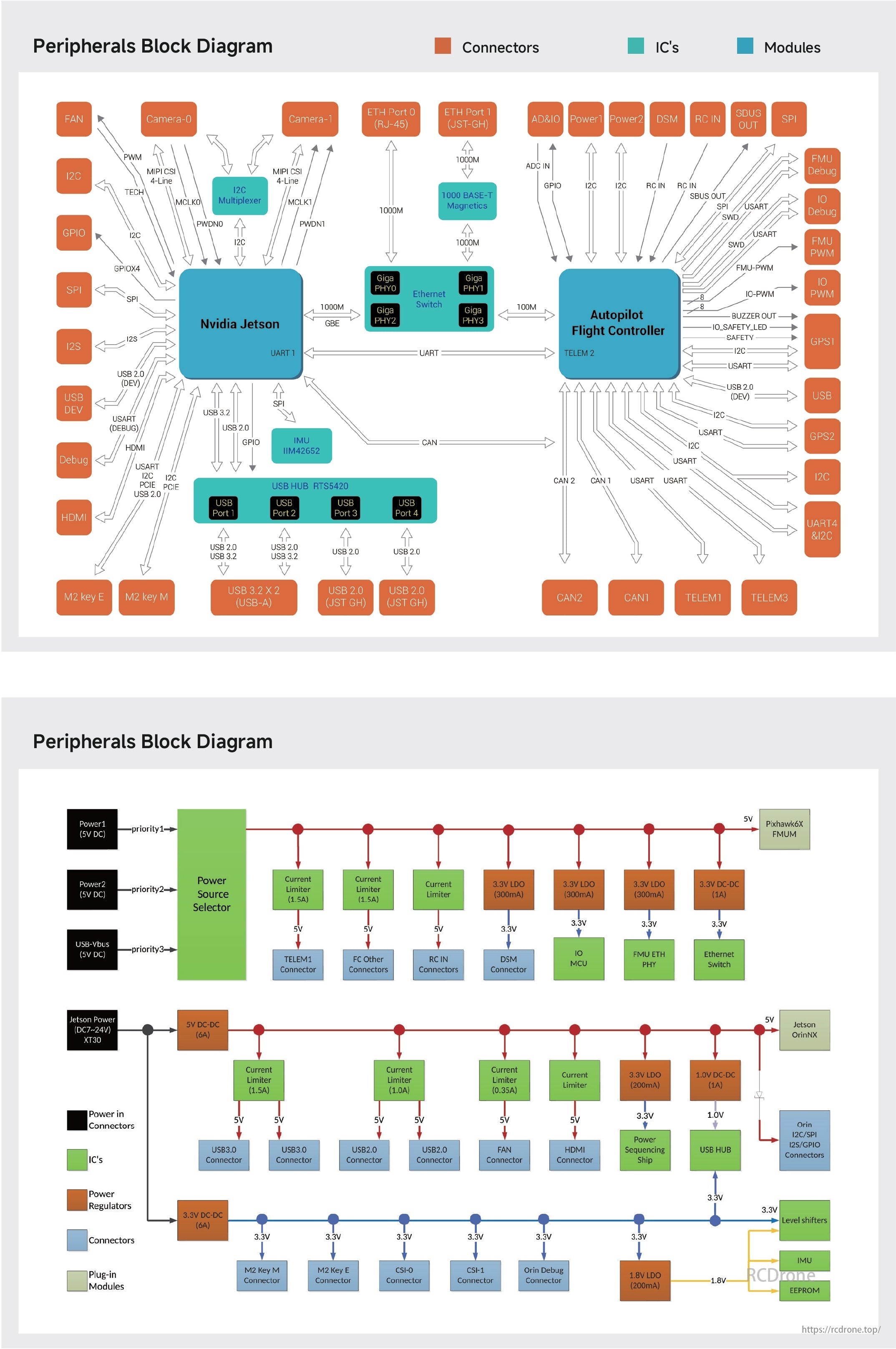
Das Bild zeigt ein Peripherieblockdiagramm für ein eingebettetes System mit Komponenten wie dem Nvidia Jetson und dem Autopilot Flight Controller. Es enthält verschiedene Anschlüsse, ICs und Module wie USB-Anschlüsse, Ethernet-Switches und Leistungsregler und veranschaulicht deren Verbindungen und Datenfluss.
Referenz-Schaltplan

Zwei Diagramme veranschaulichen Stromverteilungssysteme für ein Jetson-Modul mit einer Batterie. Das linke Diagramm verwendet ein PM02D-Strommodul und eine Stromverteilungsplatine, während das rechte Diagramm ein externes UBEC für Batterien über 4S enthält.Beide Setups gewährleisten eine ordnungsgemäße Spannungsregelung für Jetson und Pixhawk Power.
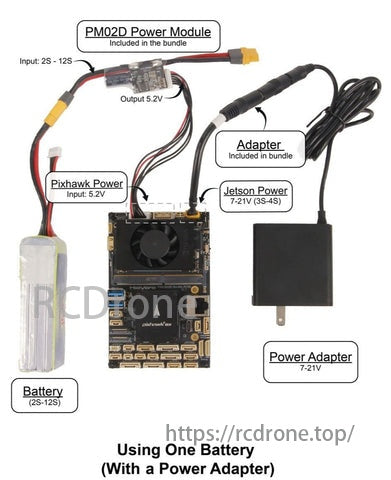
Das PM02D-Stromversorgungsmodul verbindet die Batterie mit Pixhawk und Jetson und verwendet eine Batterie mit einem Netzteil für 7–21 V-Eingang.
Related Collections






Entdecken Sie mehr Drohnen und Zubehör
-

Kameradrohne
Unsere Kamera-Drohnen-Kollektion bietet eine breite Palette von Marken, darunter FIMI, JJRC, SJRC,...
-

FPV -Drohne
Entdecken Sie unsere komplette FPV-Drohnenkollektion mit Racing-, Freestyle-, Long Range-, Cinewhoop- und...
-

Drohnenzubehör
Entdecken Sie eine große Auswahl an Drohnenzubehör, um die Flugleistung zu verbessern,...


