






फीटेक एससीएस20 - 6वी 20किग्रा.सेमी 360 डिग्री मैग्नेटिक कोड सीरियल कंट्रोल टीटीएल सर्वो 20 किग्रा एससीएस सर्वो बस पैकेट संचार
फीटेक एससीएस20 - 6वी 20किग्रा.सेमी 360 डिग्री मैग्नेटिक कोड सीरियल कंट्रोल टीटीएल सर्वो 20 किग्रा एससीएस सर्वो बस पैकेट संचार
Feetech
पिकअप उपलब्धता लोड नहीं की जा सकी
विनिर्देश
ब्रांड नाम: फीटेक
उत्पत्ति: मुख्यभूमि चीन
सामग्री: प्लास्टिक
प्लास्टिक प्रकार: पीसी
RC पार्ट्स और Accs: बैटरी - LiPo
आकार: 10*10*10
वाहन प्रकार के लिए: कारें
उपयोग: वाहन और रिमोट कंट्रोल खिलौने
पुर्ज़े/सहायक उपकरण अपग्रेड करें: लिथियम बैटरी
रिमोट कंट्रोल पेरिफेरल्स/डिवाइस: रिमोट कंट्रोलर
उपकरण आपूर्ति: बैटरी
मात्रा: 1 पीसी
तकनीकी पैरामीटर: KV1100
मॉडल संख्या: SCS20-360T
चार-पहिया ड्राइव विशेषताएँ: मोटर्स
व्हीलबेस: स्क्रू
मॉडल संख्या: STS3020
आकार: 40 X 20 X 40.5 मिमी
वजन: 62g
गियर प्रकार: तांबा और एल्यूमीनियम
सीमा कोण: कोई सीमा नहीं
बेयरिंग: 2 बॉल बेयरिंग
हॉर्न गियर स्पलाइन: 25T(4.96mm)
मोटर: मेटल ब्रश मोटर
ऑपरेटिंग वोल्टेज रेंज: 6-7.4V
पीक स्टॉल टॉर्क: 20kg.cm@6V
रेटेड टॉर्क: 6.6kg.cm@6V
प्रोटोकॉल प्रकार: हाफ डुप्लेक्स एसिंक्रोनस सीरियल कम्युनिकेशन
केस: एल्यूमीनियम और प्लास्टिक
|
1.पर्यावरणीय स्थिति लागू करें 4-1 निष्क्रिय धारा (बंद होने पर) 10mA 10mA
इलेक्ट्रॉनिक नियंत्रण फ़ंक्शन:
1.एक्सेलेरेशन स्टार्ट स्टॉप फ़ंक्शन: गति और त्वरण मान सेट किया जा सकता है, गति प्रभाव अधिक कोमल है। 2.उच्च परिशुद्धता, 360 डिग्री पूर्ण स्थिति 4096 बिट परिशुद्धता, उच्चतम स्थिति रिज़ॉल्यूशन 0.088 डिग्री है, यदि नियंत्रण 90 डिग्री है, तो इनपुट 4096/360 * 90 = 1024, यदि नियंत्रण 180 डिग्री है, इनपुट 4096 / 360 * 180 = 2048, ताकि गणना की जा सके। 3. चार कार्य मोड स्विचिंग हैं (मोड 0 स्थिति सर्वो, मोड 1 स्पीड क्लोज्ड-लूप, मोड 2 स्पीड ओपन-लूप, मोड 3) स्टेप सर्वो). 1)、मोड 0:स्थान मोड, डिफ़ॉल्ट मोड। इस मोड में, 360 डिग्री पूर्ण कोण नियंत्रण का एहसास किया जा सकता है। त्वरण आंदोलन का समर्थन करें। 2)、मोड 1:स्पीड क्लोज्ड-लूप, प्रोग्रामिंग इंटरफ़ेस में, ऑपरेशन मोड 1 पर सेट है, स्पीड क्लोज्ड-लूप मोड पर स्विच करें, और चलाने के लिए स्पीड कॉलम में संबंधित गति दर्ज करें . 3)、मोड 2: स्पीड ओपन-लूप, प्रोग्रामिंग इंटरफ़ेस में, ऑपरेशन मोड 2 पर सेट है, स्पीड ओपन-लूप मोड पर स्विच करें, और चलाने के लिए समय कॉलम में संबंधित समय दर्ज करें। 4)、मोड3:स्टेप मोड: प्रोग्रामिंग इंटरफ़ेस में, अधिकतम/न्यूनतम कोण सीमा 0 पर सेट है, और ऑपरेशन मोड 3 पर सेट है। स्टेप मोड पर स्विच करें। लक्ष्य स्थिति की ओर कदम बढ़ाने के लिए स्थिति पट्टी में स्थिति दर्ज करें। उसी दिशा में आगे बढ़ने के लिए स्थिति पर फिर से क्लिक करें। 4、मल्टी टर्न मोड, 360 डिग्री पूर्ण नियंत्रण और फीडबैक, उच्चतम सटीकता के तहत, पूर्ण स्थिति नियंत्रण प्लस या माइनस 7 मोड़ हो सकता है, लेकिन पावर चक्रों की संख्या सहेजी नहीं जाती है, केवल पूर्ण स्थिति फीडबैक मान बरकरार रखा जाता है। 5、एक कुंजी अंशांकन, किसी भी स्थिति में 360 डिग्री कोण स्थापना, (40 (दशमलव) पता इनपुट 128 (दशमलव)) एक कुंजी सुधार वर्तमान स्थिति मध्य (2048 (दशमलव)) है। 6、टीटीएल संचार स्तर, आधा डुप्लेक्स अतुल्यकालिक संचार, पढ़ने और लिखने के मापदंडों को समायोजित करने के लिए बस प्रोटोकॉल समर्थन, और सिंक्रोनस रीड फ़ंक्शन जोड़ें (एक भेजें) बारी-बारी से बस में प्रत्येक सर्वो से रीड बैक निर्देश प्राप्त करने का निर्देश।) 7、एकाधिक सुरक्षा, (अधिभार, ओवरकरंट, ओवरवॉल्टेज, ओवरहीटिंग, स्विच सेटिंग, स्थिति पैरामीटर बदलना) 1) ओवरलोड सुरक्षा: स्थिति का पता लगाने के माध्यम से, प्रारंभिक स्थिति से लक्ष्य स्थिति तक आंदोलन के दौरान, जब बाधाओं के अवरोध का सामना करने के बाद वर्तमान स्थिति का पता लगाया जाता है कि यह लक्ष्य स्थिति नहीं है, तो अनलोडिंग बल 2S (20%) तक रहता है डिफ़ॉल्ट अवरोधक बल का)। जब तक कोई नया कमांड ट्रिगर न हो जाए, रिलीज़ प्रोटेक्शन 2)、ओवरकरंट प्रोटेक्शन: सेट करंट वैल्यू के माध्यम से, जांचें कि करंट सेट करंट वैल्यू तक पहुंचता है या नहीं। जब यह निर्धारित वर्तमान मान तक पहुंच जाए, तो बल छोड़ दें (डिफ़ॉल्ट टॉर्क 0 है)। जब तक कोई नया कमांड ट्रिगर न हो जाए, रिलीज़ सुरक्षा 3)、ओवर वोल्टेज सुरक्षा: वर्तमान वोल्टेज मान का पता लगाएं। यदि यह निर्धारित वोल्टेज मान से अधिक है, तो अलार्म ओवर-वोल्टेज प्रदर्शित करेगा। 4)、अति ताप संरक्षण: वर्तमान मोटर तापमान का पता लगाएं। यदि तापमान निर्धारित मूल्य से अधिक हो जाता है, तो अलार्म ओवरहीट प्रदर्शित करेगा। 8:एकाधिक फीडबैक: 1)लोड फीडबैक: वर्तमान नियंत्रण आउटपुट मोटर के वोल्टेज कर्तव्य चक्र को चलाता है, और पूर्ण पैमाना 1000 = 100% टॉर्क आउटपुट है। 2)वर्तमान फीडबैक: सर्वो कार्यशील धारा, 1 = 6.5mA 3)वोल्टेज फीडबैक: सर्वो कार्यशील वोल्टेज,70=7V,0.1V 4)तापमान फीडबैक: वर्तमान सर्वो का आंतरिक कार्य तापमान (तापमान मापना)。 5)स्पीड फीडबैक: वर्तमान मोटर रोटेशन की गति, और यूनिट समय में चरणों की संख्या (प्रति सेकंड) 9、पीआईडी पैरामीटर खोलें। |




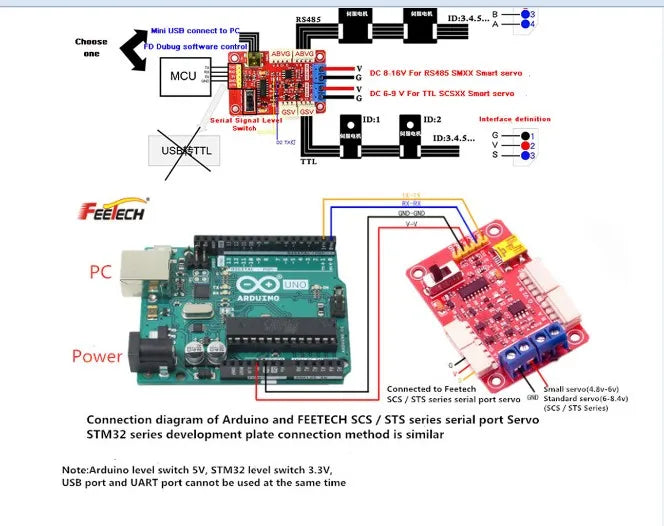
>hmni USB unmChu Chontc Dubuq ior contfo A8-zi DC R I6y Fr RSRS Shr smuc] >hrtu MCU DC EBYFor ECsX Smor keno 5eal 6i00.
Related Collections






