




CEREBOTO OpenArm 7DOF रोबोटिक आर्म किट – DIY या प्री-असेंबल्ड, ओपन-सोर्स ROS/पायथन कंट्रोल
CEREBOTO OpenArm 7DOF रोबोटिक आर्म किट – DIY या प्री-असेंबल्ड, ओपन-सोर्स ROS/पायथन कंट्रोल
CEREBOTO
पिकअप उपलब्धता लोड नहीं की जा सकी
Overview
CEREBOTO OpenArm 7DOF रोबोटिक आर्म एक शोध-ग्रेड, मानव-स्केल रोबोटिक आर्म है जिसे विश्वविद्यालयों, प्रयोगशालाओं, स्टार्टअप्स और गंभीर निर्माताओं के लिए डिज़ाइन किया गया है। 7 डिग्री ऑफ़ फ़्रीडम, 633 मिमी आर्म रिच, 4.1 किलोग्राम का सामान्य पेलोड और प्रति आर्म 6.0 किलोग्राम का पीक पेलोड के साथ, OpenArm उच्च-परिशुद्धता गति, सुरक्षित भौतिक इंटरैक्शन और समृद्ध ओपन-सोर्स उपकरण प्रदान करता है।
आप पूर्ण हाथों से असेंबली के लिए एक DIY हार्डवेयर किट चुन सकते हैं, या एक फैक्ट्री-कैलिब्रेटेड, उपयोग के लिए तैयार समाप्त आर्म। सिंगल-आर्म, डुअल-आर्म और क्वाड-आर्म कॉन्फ़िगरेशन उपलब्ध हैं।
मुख्य विशेषताएँ
-
7DOF मानव-स्केल रोबोटिक आर्म – प्राकृतिक संचालन और टेलीऑपरेशन के लिए 160–165 सेमी मानव आर्म लंबाई के साथ मेल खाने के लिए डिज़ाइन किया गया।
-
उच्च पेलोड &और स्थिरता – सामान्य पेलोड 4.1 किलोग्राम, प्रति आर्म 6.0 किलोग्राम का पीक पेलोड, 5.5 किलोग्राम का हल्का आर्म वजन।
-
बैकड्राइव करने योग्य मोटर्स &और अनुपालन संरचना – मानव-रोबोट सहयोग और बल-नियंत्रित कार्यों के लिए सुरक्षित, सुगम इंटरैक्शन।
-
1 kHz CAN-FD नियंत्रण लूप – उच्च-प्रदर्शन अनुसंधान और औद्योगिक-ग्रेड अनुप्रयोगों के लिए वास्तविक समय, कम-लेटेंसी नियंत्रण।
-
सभी-मेटल निर्माण – कठोरता और स्थायित्व के लिए मजबूत एल्यूमीनियम-एलॉय और स्टेनलेस-स्टील मुख्य संरचना।
-
ओपन-सोर्स हार्डवेयर &और सॉफ़्टवेयर – गहरे अनुकूलन के लिए ओपन CAD, PCB, फर्मवेयर और नियंत्रण सॉफ़्टवेयर।
-
ROS, Python और C++ समर्थन – तेज़ एल्गोरिदम विकास के लिए आधिकारिक ROS एकीकरण और Python/C++ APIs।
-
समृद्ध पारिस्थितिकी तंत्र और विस्तार – पूर्ण रोबोटिक प्लेटफार्मों के लिए कुशल रोबोटिक हाथ, गति-कैप्चर दस्ताने और मोबाइल बेस का समर्थन करता है।
तकनीकी विनिर्देश
-
स्वतंत्रता के डिग्री: 7 DOF प्रति हाथ
-
हाथ की पहुंच: 633 मिमी
-
सामान्य पेलोड: 4.1 किलोग्राम
-
पीक पेलोड: 6.0 किलोग्राम प्रति हाथ
-
हाथ का वजन: लगभग 5.5 किलोग्राम प्रति हाथ
-
सामग्री: एल्युमिनियम-एलॉय और स्टेनलेस-स्टील संरचनात्मक भाग
-
नियंत्रण इंटरफेस: CAN / CAN-FD, UART (डुअल/क्वाड-आर्म संस्करणों पर शामिल USB2CANFD-X2 एडेप्टर के माध्यम से)
-
नियंत्रण आवृत्ति: 1 kHz CAN-FD लूप तक
-
सॉफ़्टवेयर समर्थन: ROS ढांचा, पायथन API, C++ API
-
एर्गोनॉमिक्स: 160–165 सेमी शरीर ऊँचाई वाले उपयोगकर्ताओं के लिए उपयुक्त हाथ की लंबाई
सॉफ़्टवेयर &और ओपन-सोर्स पारिस्थितिकी तंत्र
OpenArm एक पूरी तरह से ओपन-सोर्स रोबोटिक आर्म प्लेटफ़ॉर्म है। आधिकारिक संसाधनों में शामिल हैं:
-
वेबसाइट: openarm.dev
-
प्रलेखन: docs.openarm.dev
-
गिटहब: github.com/enactic/openarm
-
ट्यूटोरियल वीडियो: आरंभ करने के लिए आधिकारिक YouTube गाइड
ओपन CAD, PCB और फर्मवेयर फ़ाइलों के साथ, आप यांत्रिकी, इलेक्ट्रॉनिक्स और नियंत्रण सॉफ़्टवेयर को संशोधित कर सकते हैं, या अपने स्वयं के शोध विषयों के लिए नए सेंसर और एंड-इफेक्टर्स के साथ आर्म को बढ़ा सकते हैं।
विशिष्ट अनुप्रयोग परिदृश्य
OpenArm को एक बहुपरकारी, उच्च-सटीक अनुसंधान और शिक्षण मंच के रूप में डिज़ाइन किया गया है:
-
विश्वविद्यालय रोबोटिक्स पाठ्यक्रम और प्रयोगशाला प्रयोग
-
अनुसंधान संस्थान और प्रयोगशाला परियोजनाएँ
-
मजबूती से सीखने और भौतिकी आधारित एआई अनुसंधान
-
मानव-रोबोट इंटरैक्शन और सहयोगी रोबोट अध्ययन
-
मेकर्स्पेस और ओपन-सोर्स हार्डवेयर टीमें
-
इंजीनियरिंग शिक्षा और प्रशिक्षण मंच
मानव-आकार के आकार और सहायक क्रियान्वयन के साथ, OpenArm संचालन, दूरसंचार, अनुकरणीय सीखने, सहायक रोबोटिक्स और अधिक के लिए आदर्श है।
उत्पाद संस्करण &और कॉन्फ़िगरेशन
संस्करण 1 – DIY हार्डवेयर किट
-
उन उपयोगकर्ताओं के लिए जिनके पास मजबूत हाथों का कौशल है और जो यांत्रिक संरचना को गहराई से समझना चाहते हैं।
-
इसमें सभी यांत्रिक, विद्युत और 3D-प्रिंटेड भाग शामिल हैं; आप मैनुअल का पालन करते हुए खुद आर्म को असेंबल और कैलिब्रेट करते हैं।
संस्करण 2 – तैयार रोबोटिक आर्म
-
अनुसंधान संस्थानों, प्रयोगशालाओं, कंपनियों और शिक्षकों के लिए जिन्हें एक प्लग-एंड-प्ले प्लेटफ़ॉर्म की आवश्यकता है।
-
शिपिंग से पहले पूरी तरह से असेंबल, ट्यून और कैलिब्रेट किया गया; बॉक्स से बाहर उपयोग के लिए तैयार।
उपलब्ध आर्म कॉन्फ़िगरेशन (सूची के अनुसार):
-
DIY किट – सिंगल आर्म
-
फिनिश्ड आर्म – सिंगल आर्म
-
DIY किट – डुअल आर्म
-
फिनिश्ड आर्म्स – डुअल आर्म्स
-
DIY किट – क्वाड आर्म्स
-
फिनिश्ड आर्म्स – क्वाड आर्म्स
पैकेज सामग्री
प्रत्येक OpenArm किट या फिनिश्ड सिस्टम में आमतौर पर शामिल होते हैं:
-
एल्यूमिनियम-एलॉय और स्टेनलेस-स्टील मुख्य संरचनात्मक घटक
-
मोटर्स, ड्राइवर बोर्ड, पावर सप्लाई और केबल
-
3D-प्रिंटेड पार्ट्स और स्क्रू सेट
डुअल-आर्म और क्वाड-आर्म संस्करण: एक आधिकारिक BOM-संगत USB2CANFD-X2 डिवाइस (CEREBOTO अधिकृत घरेलू एजेंट है) PC से CAN-FD संचार के लिए।
समर्थित हार्डवेयर एक्सटेंशन
OpenArm कई हार्डवेयर ऐड-ऑन (अलग से बेचे जाते हैं) का समर्थन करता है, जिससे आप एक पूर्ण रोबोटिक सिस्टम बना सकते हैं:
-
कुशल रोबोटिक हाथ – बारीक हेरफेर और ग्रास्पिंग अनुसंधान के लिए।
-
मोशन-कैप्चर ग्लव सेट – सहज टेलीऑपरेशन और अनुकरण सीखने के लिए।
-
मोबाइल बेस – OpenArm को एक मोबाइल मैनिपुलेटर प्लेटफॉर्म में बदलने के लिए।
अक्सर पूछे जाने वाले प्रश्न
प्रश्न: क्या रोबोटिक हाथ का तुरंत उपयोग किया जा सकता है?
उत्तर: तैयार-हाथ संस्करण को फैक्ट्री में पूरी तरह से ट्यून और कैलिब्रेट किया गया है—बस इसे चालू करें और काम करना शुरू करें। DIY हार्डवेयर किट के लिए आपको निर्देशों का पालन करते हुए सिस्टम को असेंबल और सेटअप करना होगा।
प्रश्न: क्या OpenArm ROS या अन्य मिडलवेयर के साथ संगत है?
उत्तर: हाँ। OpenArm आधिकारिक रूप से ROS ढांचे का समर्थन करता है, और आप Python और C++ APIs के माध्यम से भी आर्म को नियंत्रित कर सकते हैं।
प्रश्न: यह उत्पाद किसके लिए है?
उत्तर: विश्वविद्यालय और संस्थान के शोधकर्ता, AI &और रोबोटिक्स प्रयोगशालाएँ, शिक्षण पाठ्यक्रम, इंजीनियरिंग प्रशिक्षण केंद्र, और उन्नत शौकिया।
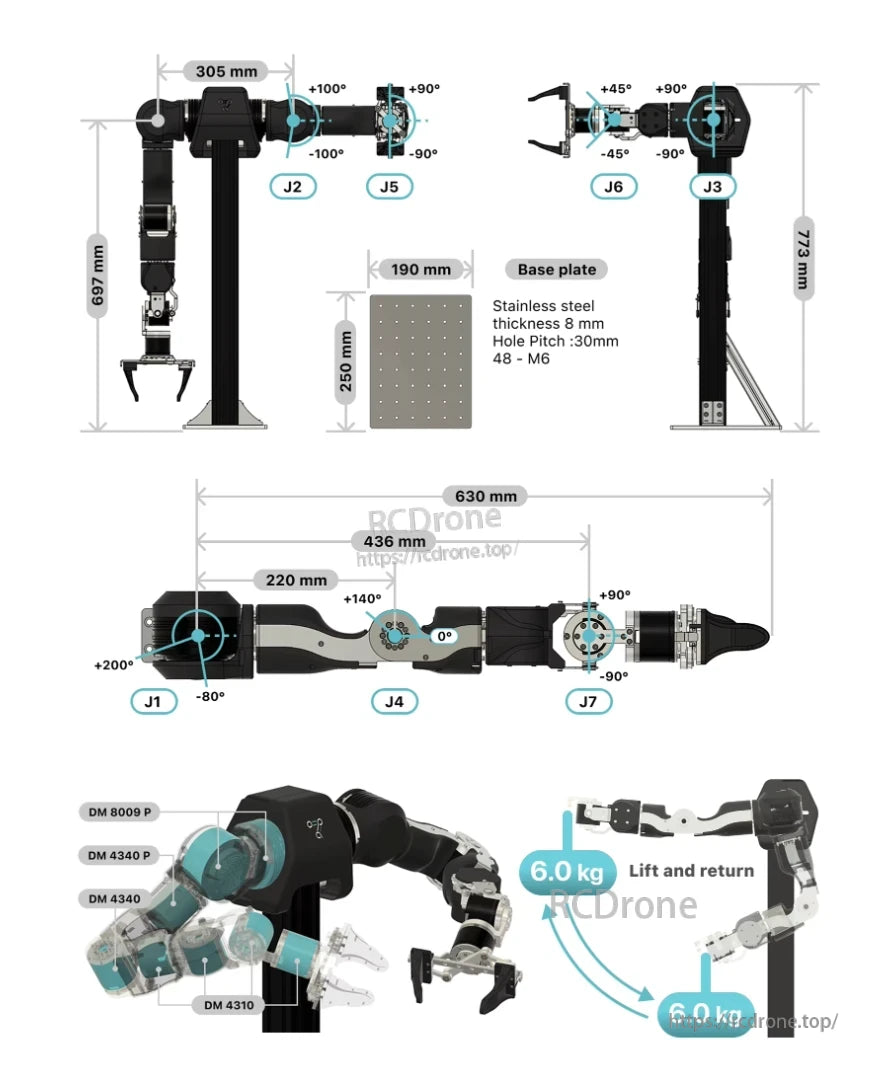
Cereboto OpenArm 7DOF रोबोट आर्म में सात जोड़ों (J1–J7) के साथ परिभाषित कोणीय रेंज हैं। इसकी ऊँचाई 697 मिमी या 773 मिमी है, यह 630 मिमी तक पहुँचता है, और 190×250 मिमी स्टेनलेस स्टील बेस प्लेट पर माउंट होता है—8 मिमी मोटी जिसमें 30 मिमी पिच पर 48 M6 छिद्र हैं। DM8009P, DM4340P, DM4340, और DM4310 मोटर्स द्वारा संचालित, यह 6.0 किलोग्राम पेलोड को सटीकता के साथ संभालता है। औद्योगिक और शोध उपयोग के लिए डिज़ाइन किया गया, यह संरचनात्मक मजबूती के साथ सटीक गति नियंत्रण को संतुलित करता है।

Related Collections



