






CUAV Pixhawk V6X V2 ड्रोन कंट्रोलर PX4 ArduPilot के लिए, STM32H753IIK6, RM3100, 100Mbps ईथरनेट
CUAV Pixhawk V6X V2 ड्रोन कंट्रोलर PX4 ArduPilot के लिए, STM32H753IIK6, RM3100, 100Mbps ईथरनेट
CUAV
पिकअप उपलब्धता लोड नहीं की जा सकी
अवलोकन
CUAV Pixhawk V6X V2 एक Pixhawk-श्रृंखला ड्रोन नियंत्रक है जिसे PX4 और ArduPilot ऑटोपायलट फर्मवेयर के लिए डिज़ाइन किया गया है। यह Pixhawk FMU v6x मानक और मॉड्यूलर डिज़ाइन दर्शन का पालन करता है, जिसमें उन्नत औद्योगिक-ग्रेड रेडंडेंट सेंसिंग, एक स्थिर-तापमान बाहरी घड़ी और MCU गर्मी अपव्यय डिज़ाइन, 5V/3.3V PWM स्तर स्विचिंग, और एक पेटेंटेड झटका अवशोषण संरचना शामिल है। मानक PMU 2 Lite पावर प्रबंधन मॉड्यूल 70V इनपुट और 220A करंट डिटेक्शन का समर्थन करता है।
मुख्य विशेषताएँ
- H7 डबल-प्रिसिजन फ्लोटिंग-पॉइंट यूनिट (STM32H753IIK6); 480MHz डबल प्रिसिजन फ्लोटिंग-पॉइंट यूनिट; 2M फ्लैश मेमोरी
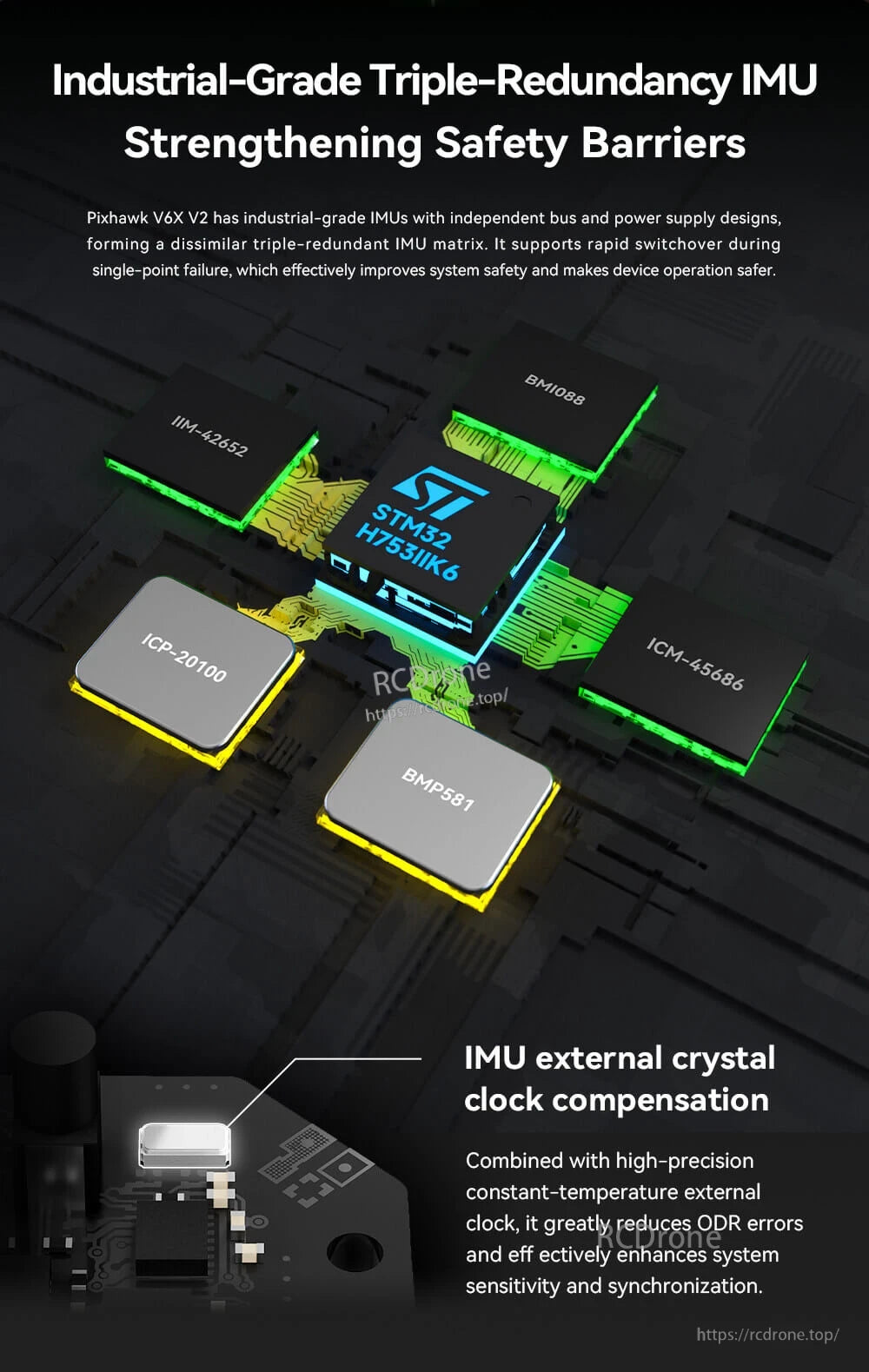
- औद्योगिक-ग्रेड असमान त्रैतीय-निष्क्रिय IMU मैट्रिक्स स्वतंत्र बस और पावर सप्लाई डिज़ाइन के साथ (IIM-42652, BMI088, ICM-45686)
- संयुक्त डुअल-निष्क्रिय बैरोमीटर (BMP581, ICP-20100)
- कोर शॉक अवशोषण प्रणाली तीन-धुरी (X, Y, Z) शॉक अवशोषण के साथ; झुकी हुई चार-कोने का समर्थन डिज़ाइन; नए प्रकार का शॉक-एब्जॉर्बिंग सामग्री
- ऑटोमोटिव-ग्रेड RM3100 मैग्नेटिक कंपास मजबूत मैग्नेटिक इंटरफेरेंस अस्वीकृति के लिए
- IMU बाहरी क्रिस्टल घड़ी मुआवजा (ODR त्रुटियों को कम करने और संवेदनशीलता और समन्वय में सुधार के लिए उच्च-सटीक स्थिर-तापमान बाहरी घड़ी के साथ उपयोग किया जाता है)
- स्थायी तापमान नियंत्रण प्रणाली: थर्मल कंडक्टिव सिलिकॉन और IMU तापमान मुआवजा तापमान-संबंधित ड्रिफ्ट को कम करने के लिए
- लचीला सॉफ़्टवेयर 5V और 3 के बीच स्विचिंग।3V PWM आउटपुट स्तर
- उच्च गति डेटा समन्वय के लिए एकीकृत 100 Mbps ईथरनेट इंटरफेस, जैसे कि मिशन कंप्यूटर और सर्वेक्षण कैमरे
- सुरक्षित बूट और सुरक्षित फर्मवेयर अपडेट सेवाओं का समर्थन करता है
- मल्टी-रेडंडेंट पावर सप्लाई डिज़ाइन; 2-चैनल CAN PMU इनपुट का समर्थन करता है; मानक के रूप में PMU 2 Lite शामिल है
- प्रत्यक्ष स्क्रू माउंटिंग के लिए नीचे माउंटिंग होल जोड़े गए; माउंटिंग होल M2 मानक स्क्रू के साथ संगत
विशेषताएँ
| प्रोसेसर | STM32H753IIK6 |
| कोप्रोसेसर | STM32F103 |
| संस्करण | Pixhawk V6XV2 |
| CPU / मेमोरी (उल्लेखित) | 480MHz डबल प्रिसिजन फ्लोटिंग-पॉइंट यूनिट; 2M फ्लैश मेमोरी |
| एक्सेलेरोमीटर & जिरोस्कोप | IIM-42652; BMI088; ICM-45686 |
| कंपास | RM3100 |
| बारोमीटर | BMP581; ICP-20100 |
| PWM I/O | 16 |
| PWM स्तर | 3.3V / 5V (सॉफ़्टवेयर स्विचिंग) |
| पावर | 2 (2 CAN पावर इंटरफेस) |
| GPS पोर्ट | 2 (GPS1: I2C और सुरक्षा स्विच के साथ GPS इंटरफेस; GPS2: I2C और GPS के साथ इंटरफेस) |
| TELEM पोर्ट | 3 |
| CAN बस | 2 |
| PPM RC | 1 (PPM रिसीवर के लिए समर्पित इनपुट) |
| SBUS/DSM/RSSI | 2 (1 SBUS/DSM/Spektrum इनपुट; 1 एनालॉग 3.3V/PWM इनपुट) |
| SBUS आउट | 1 |
| FMU डिबग | 1 |
| IO डिबग | 1 |
| ईथरनेट | 1 (100 Mbps) |
| SPI बाहरी 1 | 1 (बाहरी सेंसर विस्तार के लिए SP16 इंटरफेस) |
| ADIO | 1 (AD3.3/ADC6.6) |
| UART4 | 1 |
| USB पोर्ट | 2 (Type-C x1; USB बाहरी कनेक्शन के लिए GH इंटरफेस x1) |
| TF कार्ड | 1 |
| पावर मॉड्यूल | मानक PMU 2 लाइट (5V संस्करण), इनपुट वोल्टेज: 12-70V |
| ऑपरेटिंग वोल्टेज | USB: 4.75-5.25V; PMU 2 Lite: 12-70V; पावर: 4.85-5.45V |
| संचालन तापमान | -20 से 85C |
| आकार | 45 x 85.1 x 29.2 मिमी |
| वजन | नियंत्रक: 97.9g; कोर: 43.1g; कैरियर बोर्ड (स्क्रू सहित): 54.8g |
| माउंटिंग नोट (चित्र पाठ) | M2 मानक स्क्रू के साथ संगत माउंटिंग होल; दिखाए गए आयाम: 72 मिमी; 22.50 मिमी; 24 मिमी |
क्या शामिल है
- पिक्सहॉक V6X V2 x1
- CAN PMU 2 लाइट 5V पावर मॉड्यूल x1
- PMU 2 लाइट-5V हेडर पावर केबल (X7+ (V6X) संस्करण), तार की लंबाई: 25 सेमी x1
- CAN/I2C एक्सटेंशन बोर्ड x1
- TF मेमोरी कार्ड x1
- टाइप-C केबल, तार की लंबाई: 100 सेमी x1
- DSM RC केबल, तार की लंबाई: 30 सेमी x1
- SBUS RC केबल, तार की लंबाई: 30 सेमी x1
- PPM RC/SBUS OUT केबल, तार की लंबाई: 30 सेमी x1
- ईथरनेट केबल, तार की लंबाई: 40 सेमी x1
- CAN केबल, तार की लंबाई: 30 सेमी x1
- TELEM केबल, तार की लंबाई: 30 सेमी x1
- UART 4 केबल, तार की लंबाई: 30 सेमी x1
- UART4 -> I2C केबल, तार की लंबाई: 30 सेमी x1
- ADIO केबल, तार की लंबाई: 30 सेमी x1
- डिबग केबल, तार की लंबाई: 10 सेमी x1
- USB -> टाइप-C फीमेल कनेक्टर एक्सटेंशन केबल, तार की लंबाई: 50 सेमी x1
- 3M डबल-साइडेड x2
अनुप्रयोग
- ArduPilot और PX4 के साथ संगत
- मल्टी-रोटर, फिक्स्ड-विंग, VTOL फिक्स्ड-विंग,无人 हेलीकॉप्टर,无人 वाहन, और无人 जहाज (सबमर्सिबल) का समर्थन करता है
- जहां समर्थित हो, मिशन कंप्यूटर और अन्य ऑनबोर्ड उपकरणों के साथ उच्च गति ईथरनेट डेटा समन्वय
संगतता जांच और सेटअप प्रश्नों के लिए, संपर्क करें [email protected] या पर जाएं https://rcdrone.top/.
वीडियो
विवरण

पिक्सहॉक V6X V2 उड़ान नियंत्रक H7 प्रोसेसर का उपयोग करता है और इसमें ट्रिपल-रेडंडेंट IMU, डुअल बैरोमीटर, और RM3100 कंपास शामिल है जिसमें शॉक-एब्जॉर्प्शन डिज़ाइन है।

पिक्सहॉक V6X V2 STM32H753IIK6 H7 प्रोसेसर का उपयोग करता है जो PX4 और ArduPilot-आधारित उड़ान नियंत्रण सेटअप का समर्थन करता है।

पिक्सहॉक V6X V2 एक तीन-धुरी (X, Y, Z) शॉक-एब्जॉर्प्शन माउंट का उपयोग करता है जिसमें चार झुके हुए कोने के समर्थन होते हैं जो कंपन और शोर को कम करने में मदद करते हैं।
पिक्सहॉक V6X V2 उड़ान नियंत्रक डिज़ाइन में STM32H753IIK6 के चारों ओर ट्रिपल-रेडंडेंट IMU सेटअप और सेंसर समय के लिए बाहरी क्रिस्टल घड़ी मुआवजा शामिल है।

पिक्सहॉक V6X V2 एक ऑटोमोटिव-ग्रेड RM3100 मैग्नेटोमीटर को एकीकृत करता है और अधिक स्थिर अभिविन्यास और नेविगेशन के लिए GPS दिशा निर्धारण का समर्थन करता है।
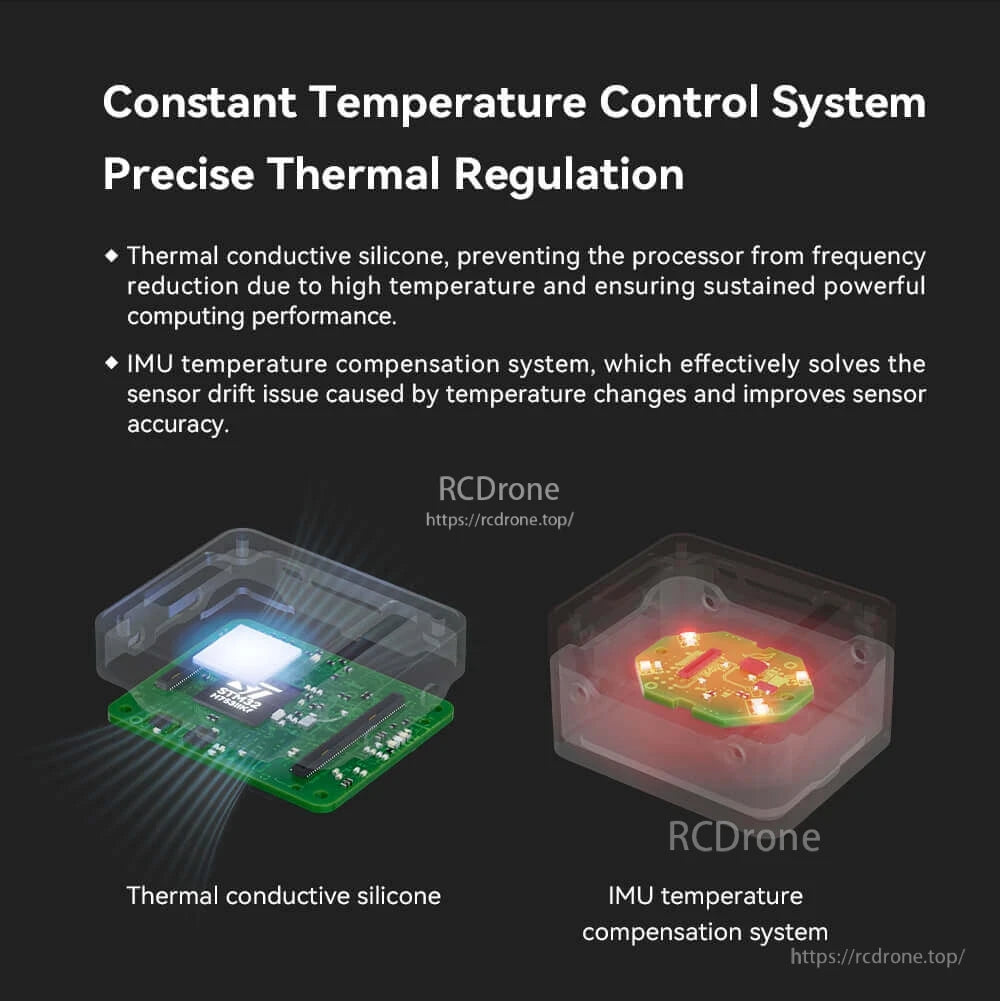
एक स्थायी तापमान नियंत्रण प्रणाली तापीय संवाहक सिलिकॉन और IMU तापमान मुआवजे का उपयोग करती है ताकि तापमान से संबंधित ड्रिफ्ट को कम किया जा सके।
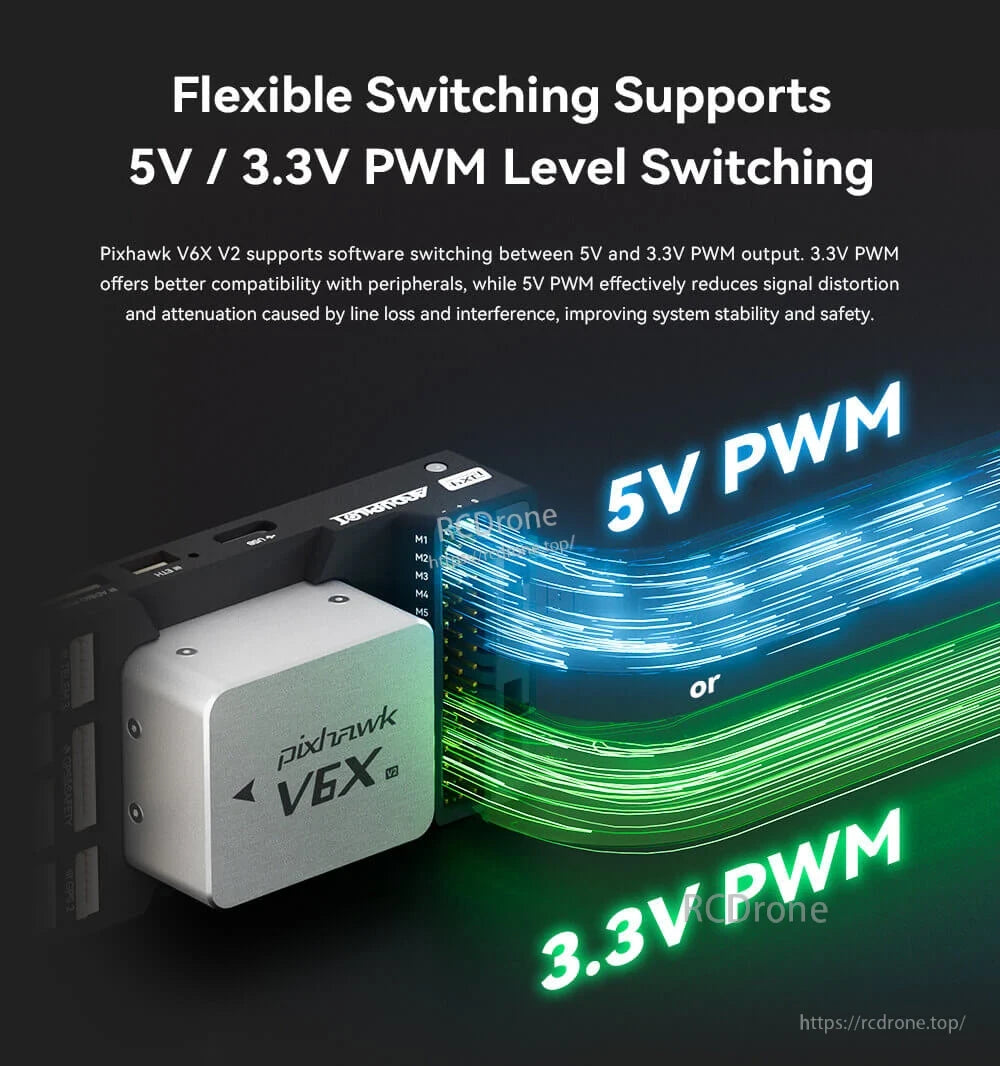
Pixhawk V6X V2 विभिन्न परिधीयों के साथ आसान संगतता के लिए 5V और 3.3V PWM आउटपुट स्तरों के बीच लचीला स्विचिंग का समर्थन करता है।

Pixhawk V6X V2 एक 100 Mbps ईथरनेट इंटरफेस को USB, TELEM3, CAN, और GPS जैसे लेबल वाले पोर्ट के साथ एकीकृत करता है & साफ वायरिंग के लिए सुरक्षा।
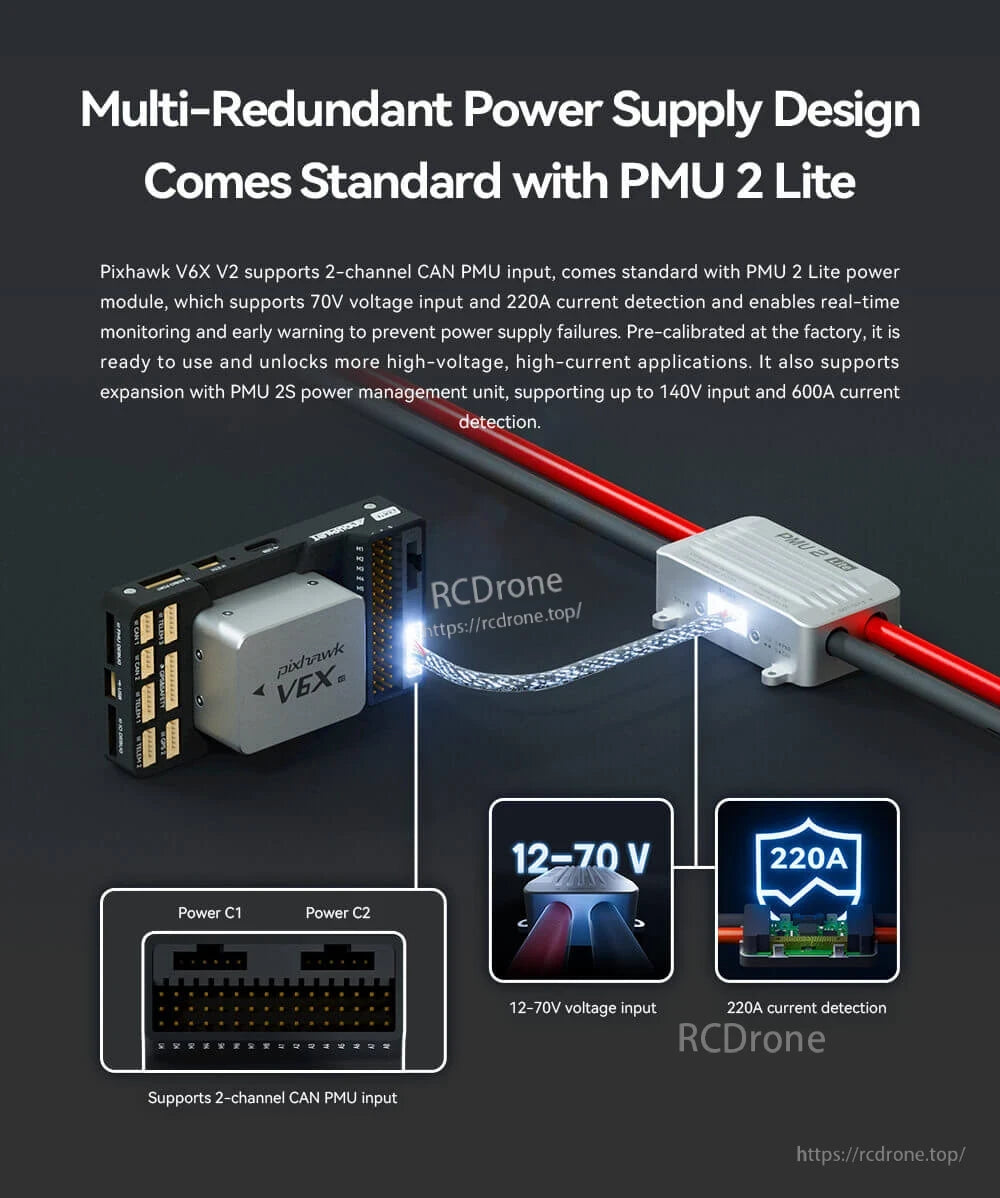
Pixhawk V6X V2 PMU 2 Lite मॉड्यूल के साथ युग्मित होता है जो बहु-निष्क्रिय शक्ति इनपुट का समर्थन करता है, 12–70V और 220A करंट डिटेक्शन का समर्थन करता है।

CUAV Pixhawk V6X V2 एक कैरियर बोर्ड पर एक मॉड्यूलर, detachable कोर मॉड्यूल का उपयोग करता है ताकि अनुकूलन और कनेक्टर पहुंच को सरल बनाया जा सके।
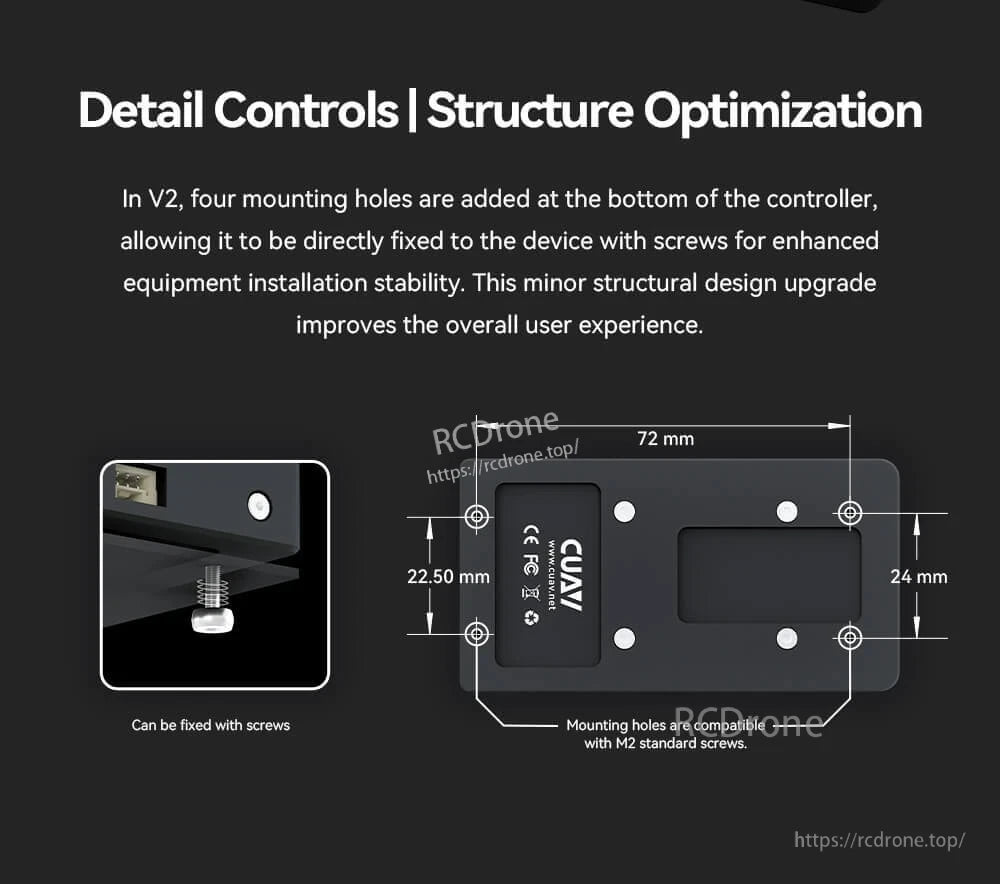
CUAV Pixhawk V6X V2 अधिक सुरक्षित स्क्रू-इन स्थापना के लिए 72 मिमी फुटप्रिंट के साथ चार M2-संगत नीचे माउंटिंग होल जोड़ता है।

पिक्सहॉक V6X V2 कई प्रकार के बिना पायलट वाले प्लेटफार्मों के लिए ArduPilot और PX4 फर्मवेयर का समर्थन करता है, जिसमें मल्टीरोटर्स, फिक्स्ड-विंग एयरक्राफ्ट, और ग्राउंड या समुद्री वाहन शामिल हैं।
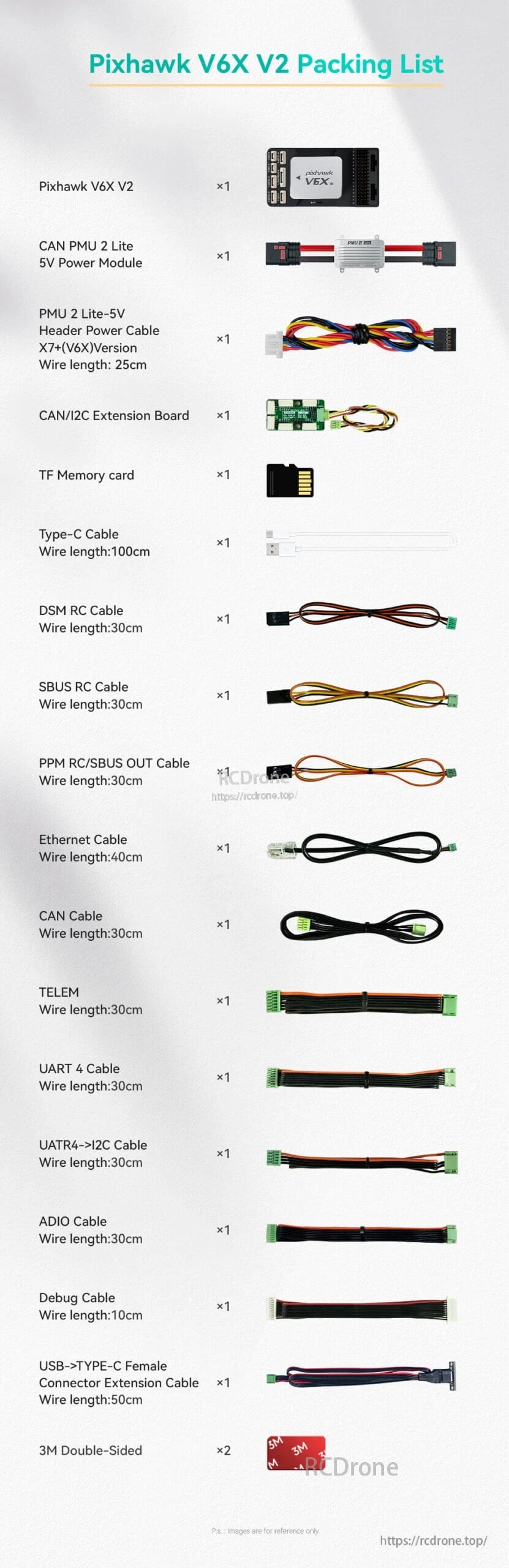
पिक्सहॉक V6X V2 किट में उड़ान नियंत्रक, CAN PMU 2 Lite 5V पावर मॉड्यूल, TF मेमोरी कार्ड, और Type‑C, RC, Ethernet, CAN, TELEM, UART, ADIO, और डिबग केबल्स का एक सेट शामिल है।
Related Collections


















