








CUAV X25 EVO ऑटोपायलट फ्लाइट कंट्रोलर - STM32H7, ट्रिपल IMU, ड्यूल बैरो, RM3100, CAN, 16 PWM, PX4/ArduPilot
CUAV X25 EVO ऑटोपायलट फ्लाइट कंट्रोलर - STM32H7, ट्रिपल IMU, ड्यूल बैरो, RM3100, CAN, 16 PWM, PX4/ArduPilot
CUAV
पिकअप उपलब्धता लोड नहीं की जा सकी
Overview
CUAV X25 EVO एक उच्च-विश्वसनीयता वाला कोर कंट्रोलर है जो बिना मानव के सिस्टम के लिए है। यह एक STM32H7 (480 MHz, 2 MB फ्लैश) प्रोसेसर को ट्रिपल इंडस्ट्रियल-ग्रेड IMU एरे, डुअल बैरोमीटर और RM3100 मैग्नेटोमीटर के साथ जोड़ता है। एक पुनः डिज़ाइन की गई पावर आर्किटेक्चर 10–18 V इनपुट का समर्थन करती है और भारी पेलोड को शक्ति देने के लिए 5 V/12 A बाहरी आउटपुट प्रदान करती है। कंट्रोलर डुअल-पाथ पावर रेडंडेंसी, व्यापक ESD/ओवर-करंट सुरक्षा, RGB स्थिति संकेत और एक मॉड्यूलर CORE/कैरीयर डिज़ाइन को एकीकृत करता है। यह ArduPilot और PX4 के साथ संगत है, और मल्टीरोटर्स, फिक्स्ड-विंग, VTOL, हेलीकॉप्टर, UGV/USV/UUV और अन्य प्लेटफार्मों के लिए उपयुक्त है।
मुख्य विशेषताएँ
-
उच्च-प्रदर्शन कंप्यूट: STM32H7 @ 480 MHz, 2 MB फ्लैश; उन्नत एल्गोरिदम (गैर-GPS नेव, FFT फ़िल्टर, LUA स्क्रिप्ट) के लिए कम CPU उपयोग हेडरूम।
-
औद्योगिक सेंसर सूट:
-
IMUs: 2× TDK IIM-42653 (±4000 °/s, ±32 g) + 1× TDK IIM-42652 (±2000 °/s, ±16 g).
-
मैग्नेटोमीटर: PNI RM3100 (एंटी-इंटरफेरेंस).
-
बारोमीटर: TDK ICP20100 &और Bosch BMP581 (डुअल).
-
विविध IMU मैट्रिक्स दोष-टॉलरेंट स्विचिंग के साथ।
-
-
IMU के लिए डुअल-तापमान-क्षतिपूर्ति प्रणाली: वास्तविक समय क्षतिपूर्ति ±0.5 °C; पूर्व पीढ़ी की तुलना में—15% कम तापमान ड्रिफ्ट, 25% बेहतर स्थिति समाधान स्थिरता।
-
कंपन पृथक्करण: चौथी पीढ़ी का झुका हुआ सममित नायलॉन मैट्रिक्स डैम्पिंग; वैकल्पिक बाहरी फिक्स्ड-ईयर पृथक करने वाले असामान्य उच्च-आवृत्ति कंपन को दबाने और डेटा की विश्वसनीयता में सुधार करने के लिए।
-
पावर आर्किटेक्चर: ऑनबोर्ड 5 V/15 A उच्च-शक्ति DC-DC; बाहरी पोर्ट 5 V/12 A आउटपुट का समर्थन करता है; इनपुट रेंज 10–18 V।
-
नेटवर्किंग &और बस: CAN बस (स्मार्ट बैटरी/ESC/सर्वो, टेलीमेट्री फीडबैक) + 100 M ईथरनेट।
-
प्रचुर I/O: सर्वो पोर्ट के माध्यम से 16 PWM तक; CAN विस्तार के माध्यम से 32 PWM तक।
-
कठोरता &और QA: डुअल-चैनल पावर रेडंडेंसी, ESD &और ओवर-करंट सुरक्षा, एंटी-स्टैटिक कनेक्टर डिज़ाइन, PCB कॉन्फॉर्मल कोटिंग, और पूरी तरह से स्वचालित परीक्षण।
-
RGB स्थिति संकेतक: आर्मिंग, पावर, GNSS/स्थिति, दोष मोड आदि के लिए बहु-रंगीन LEDs।
विशेषताएँ
| श्रेणी | विवरण |
|---|---|
| प्रोसेसर | STM32H7 Arm® Cortex®-M7 @ 480 MHz, 2 MB फ्लैश |
| संस्करण | X25 EVO |
| IMUs | IIM-42653 ×2 (जाइरो ±4000 °/सेकंड; एक्सेल ±32 g); IIM-42652 ×1 (जाइरो ±2000 °/सेकंड; एक्सेल ±16 g) |
| मैग्नेटोमीटर | RM3100 |
| बारोमीटर | TDK ICP20100 / Bosch BMP581 (डुअल) |
| PWM आउटपुट | 16 (सर्वो बैंक M1–M16) |
| पावर इनपुट (CAN) | 2 |
| जीपीएस पोर्ट | 2 |
| टेलीम पोर्ट | 2 |
| यूएआरटी4 | 1 |
| आरसी इनपुट | 1 (पीपीएम / एसबीयूएस / डीएसएम आदि)html ) |
| DEBUG (DSU) | 1 |
| ईथरनेट | 1 (100 M) |
| CAN | CAN1 ×3, CAN2 ×2 (कुल 5) |
| SPI6 विस्तार | 1 |
| ADC | 1× 3V3, 1× 6V6 |
| USB | 1× टाइप-C |
| I²C | 3 |
| RSSI | 1 |
| पावर मॉड्यूल | PMU 2 लाइट |
Operating Conditions &और Physical
| आइटम | मूल्य |
|---|---|
| इनपुट वोल्टेज (नियंत्रक) | 10–18 V |
| यूएसबी | 4.75–5.25 V |
| PMU 2 Lite आपूर्ति रेंज | 20–70 V |
| बाहरी 5 V रेल | तक 12 A आउटपुट (परिधीय/भारी भार के लिए) |
| संचालन तापमान | −20 °C से +85 °C |
| आकार | 76.5 × 45.45 × 32.2 मिमी |
| वजन | 110 ग्राम |
इंटरफेस &और लेआउट हाइलाइट्स
-
डुअल POWER C1/C2 रेल, RC IN, M1–M16 सर्वो बैंक.
-
साइड कनेक्टर्स UART/TELEM, ADC, USB-C (debug/IO), I²C, CAN1/CAN2, ETH के लिए।
-
डिज़ाइन किया गया CORE जिसे कस्टम कैरियर बोर्ड विकास के लिए अलग किया जा सकता है।
संगतता &और अनुप्रयोग
-
फर्मवेयर: पूरी तरह से ArduPilot और PX4 के साथ संगत (ड्राइवर &और सुविधाएँ)।
-
वाहन: मल्टीरोटर, फिक्स्ड-विंग, VTOL, हेलीकॉप्टर, UGV, USV, UUV/जलमग्न, और अन्य无人平台।
बॉक्स में (X25 EVO किट)
-
X25 EVO फ्लाइट कंट्रोलर × 1
-
CAN PMU2 Lite (15 V) पावर मॉड्यूल × 1
-
CAN एक्सपेंशन बोर्ड × 1
-
CAN डेटा केबल (35 सेमी) × 2
-
USB टाइप-C केबल (100 सेमी) × 1
-
TELEM केबल (30 सेमी) × 2
-
RSSI केबल (22 सेमी) × 1
-
RC IN केबल (30 सेमी) × 1
-
CAN PMU2 Lite 15 V स्मार्ट कंट्रोलर पावर केबल (30 सेमी) × 1
विवरण

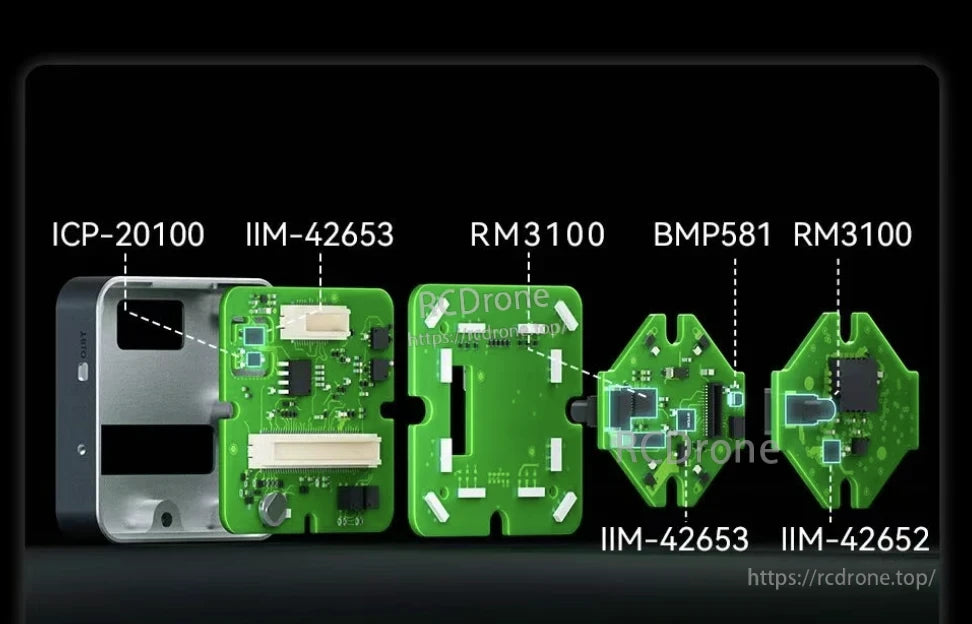
CUAV X25 EVO उड़ान नियंत्रक घटक चिप मॉडल के साथ लेबल किए गए हैं।


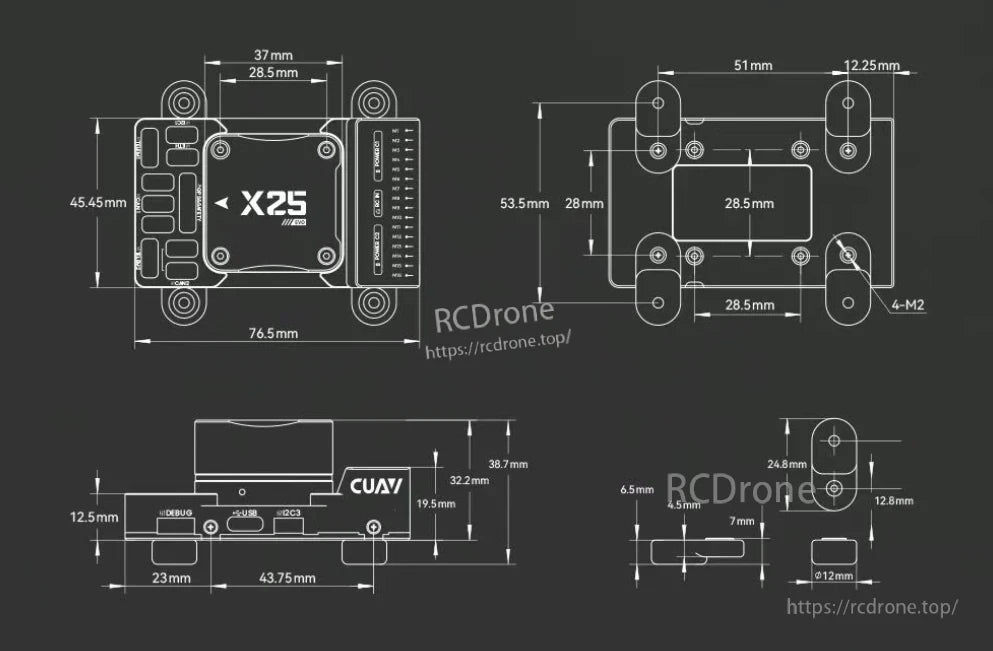
CUAV X25 EVO उड़ान नियंत्रक का माप 76.5 मिमी x 45.45 मिमी है, इसमें डिबग, USB, और I2C3 पोर्ट हैं, और सुरक्षित माउंटिंग के लिए चार M2 स्क्रू शामिल हैं।

X25 EVO ऑटोपायलट में उड़ान नियंत्रक, पावर मॉड्यूल, CAN विस्तार बोर्ड, डेटा और टेलीमेट्री केबल, टाइप-C केबल, RSSI और RC IN तार, और पावर सप्लाई लाइन शामिल हैं।
Related Collections








