




DFRobot SEN0142 MPU6050 6 DOF जाइरोस्कोप एक्सेलेरोमीटर IMU मॉड्यूल I2C डिजिटल मोशन प्रोसेसर के साथ Arduino & रोबोटिक्स के लिए
DFRobot SEN0142 MPU6050 6 DOF जाइरोस्कोप एक्सेलेरोमीटर IMU मॉड्यूल I2C डिजिटल मोशन प्रोसेसर के साथ Arduino & रोबोटिक्स के लिए
DFRobot
पिकअप उपलब्धता लोड नहीं की जा सकी
अवलोकन
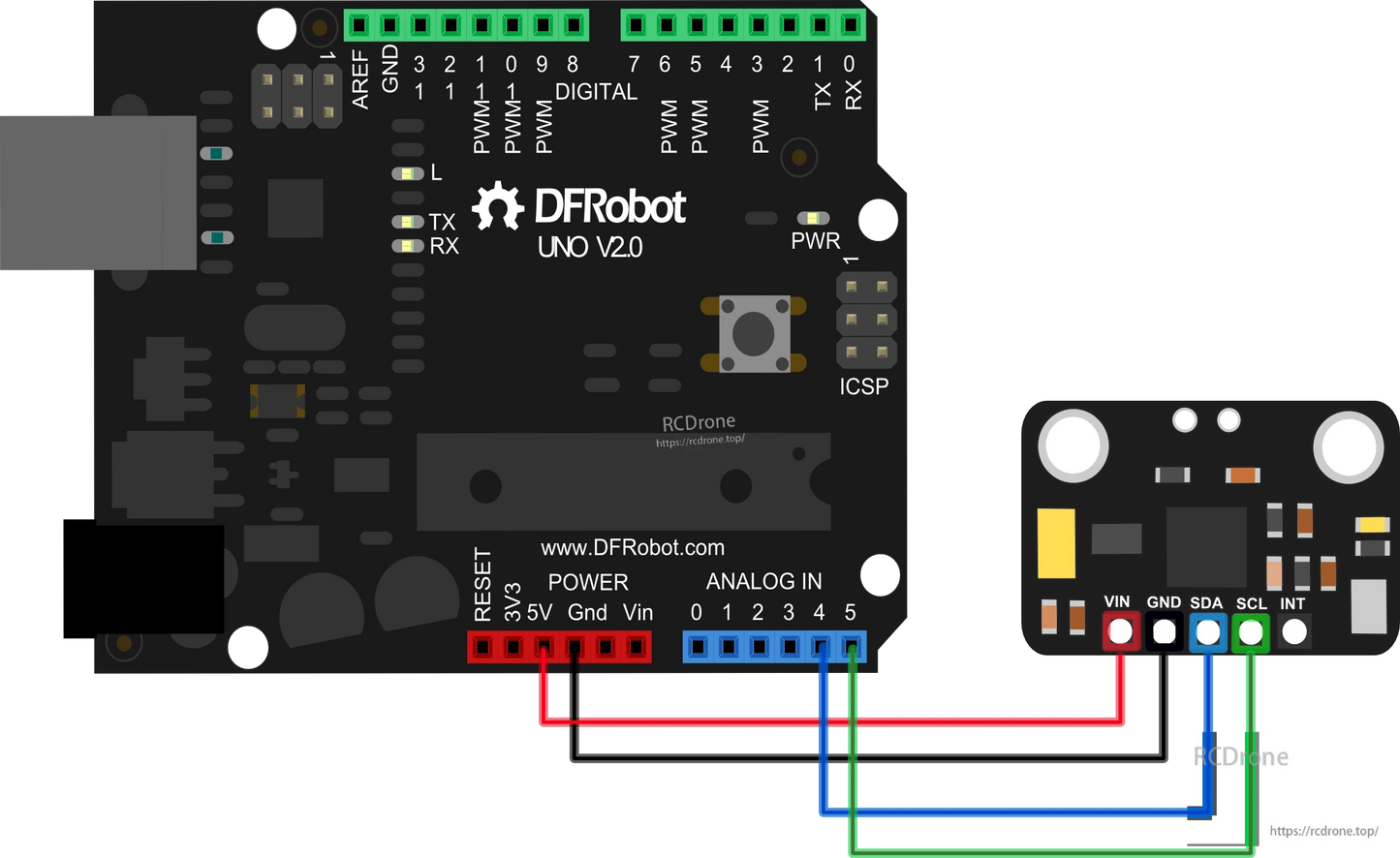
DFRobot SEN0142 MPU6050 6 DOF IMU मॉड्यूल एक 3-धुरी जिरोस्कोप और 3-धुरी एक्सेलेरोमीटर को एक ही चिप पर एकीकृत करता है, जो रोबोटिक्स, ड्रोन, पहनने योग्य उपकरणों और Arduino परियोजनाओं के लिए सटीक गति संवेदन प्रदान करता है। इसमें एक डिजिटल मोशन प्रोसेसर (DMP) है, जो उन्नत 6-धुरी और 9-धुरी मोशनफ्यूजन एल्गोरिदम का समर्थन करता है, जिससे क्वाटरनियन, यूलर कोण, और कच्चे सेंसर डेटा आउटपुट संभव होता है। 3V–5V के व्यापक इनपुट वोल्टेज रेंज के साथ, MPU6050 को Arduino और अन्य माइक्रोकंट्रोलर्स के साथ सीधे जोड़ा जा सकता है ताकि वास्तविक समय में गति ट्रैकिंग और इशारा पहचान की जा सके।
मुख्य विशेषताएँ
-
एक चिप में 3-धुरी जिरोस्कोप और 3-धुरी एक्सेलेरोमीटर को मिलाता है
-
प्रोग्राम करने योग्य एक्सेलेरोमीटर रेंज: ±2g, ±4g, ±8g, ±16g
-
जिरोस्कोप संवेदनशीलता: ±250, ±500, ±1000, ±2000 dps
-
डिजिटल मोशन प्रोसेसर (DMP) ऑनबोर्ड मोशनफ्यूजन और इशारा पहचान के लिए
-
I2C डिजिटल इंटरफेस मैट्रिक्स, क्वाटरनियन, यूलर, और कच्चे डेटा प्रारूपों का समर्थन करता है
-
एंबेडेड बायस &एंप; कंपास कैलिब्रेशन सटीकता में सुधार के लिए
-
Arduino और पहनने योग्य इलेक्ट्रॉनिक्स के साथ संगत I2Cdevlib के माध्यम से
विशेषताएँ
-
कार्यशील वोल्टेज: 3–5 V
आउटपुट: I2C डिजिटल (6/9-धुरी मोशन फ्यूजन डेटा)
-
एक्सीलरोमीटर: ±2g / ±4g / ±8g / ±16g प्रोग्रामेबल रेंज
-
जाइरोस्कोप: ±250 / ±500 / ±1000 / ±2000 dps संवेदनशीलता
-
डेटा प्रारूप: रोटेशन मैट्रिक्स, क्वाटरनियन, यूलर एंगल, कच्चा डेटा
-
आयाम: 14 × 21 मिमी
अनुप्रयोग
-
रोबोटिक्स मोशन सेंसिंग
-
Arduino &और DIY इलेक्ट्रॉनिक्स प्रोजेक्ट
-
मानव-컴퓨터 इंटरैक्शन (HCI)
-
वियोज्य उपकरण और इशारा नियंत्रण
-
नेविगेशन और संतुलन प्रणाली (e.g., सेगवे-प्रकार के परिवहन उपकरण)
-
ड्रोन स्थिरीकरण और गति ट्रैकिंग
विवरण



नमूना कोड
कृपया सभी IMU सेंसर के लिए पहले लाइब्रेरीज़ डाउनलोड करें!




- किसी चयन को चुनने से पूरा पृष्ठ ताज़ा हो जाता है।
- एक नई विंडो में खुलता है।