

उच्च टॉर्क HTDW-6056-36-NE-JC मोटर (क्रॉस्ड रोलर संस्करण), 36 अनुपात, 10Nm रेटेड, 12-48V
उच्च टॉर्क HTDW-6056-36-NE-JC मोटर (क्रॉस्ड रोलर संस्करण), 36 अनुपात, 10Nm रेटेड, 12-48V
HIGH TORQUE
नियमित रूप से मूल्य
$362.00 USD
नियमित रूप से मूल्य
विक्रय कीमत
$362.00 USD
यूनिट मूल्य
प्रति
Taxes included.
शिपिंग की गणना चेकआउट के समय की जाती है।
पिकअप उपलब्धता लोड नहीं की जा सकी
अवलोकन
उच्च टॉर्क HTDW-6056-36-NE-JC मोटर एक उच्च टॉर्क मोटर मॉड्यूल है जिसमें 36 का कमी अनुपात और एक क्रॉस्ड रोलर संस्करण संरचना है। इसे 12-48V संचालन के लिए निर्दिष्ट किया गया है जिसमें 14-बिट इनपुट/आउटपुट एन्कोडर रिज़ॉल्यूशन है और इसे सटीक निम्न गति, उच्च टॉर्क क्रियान्वयन के लिए डिज़ाइन किया गया है।
मुख्य विशेषताएँ
- मॉडल: HTDW-6056-36-NE-JC (उत्पाद कला पर HTDW-6056-36-JC के रूप में भी लेबल किया गया)
- क्रॉस्ड रोलर संस्करण
- कम बैकलैश: <10आर्कमिन
- एन्कोडर रिज़ॉल्यूशन: 14-बिट (इनपुट), 14-बिट (आउटपुट)
- नियंत्रण आवृत्ति: 3kHz
- तेज़ प्रतिक्रिया समय: ≤200us
विशेषताएँ
| लंबाई और चौड़ाई | 60मिमी |
| ऊँचाई | 56मिमी |
| वजन | 570ग्राम |
| बैकलैश | <10आर्कमिन |
| दोहराने की स्थिति सटीकता | <12आर्कमिन |
| पूर्ण स्थिति सटीकता | <15आर्कमिन |
| टॉर्क स्थिरता | / |
| ध्रुव जोड़ों की संख्या | 14 |
| कमी अनुपात | 36 |
| लॉक्ड-रोटर टॉर्क | 36Nm |
| नो-लोड RPM | 60RPM |
| रेटेड टॉर्क | 10Nm |
| रेटेड RPM | 50RPM |
| रेटिंग | 52W |
| वोल्टेज रेंज | 12-48V |
| पीक करंट | 10A |
| स्पीड कंट्रोल एक्यूरेसी | ±10% |
| इनपुट एनकोडर रिज़ॉल्यूशन | 14-बिट |
| बॉड रेट | 5Mbps |
| रेटेड करंट | 3A |
| कंट्रोल एक्यूरेसी | ±20% |
| रिस्पांस टाइम | ≤200us |
| आउटपुट एनकोडर रिज़ॉल्यूशन | 14-बिट |
| कंट्रोल फ़्रीक्वेंसी | 3kHz |
अनुप्रयोग
- मानवाकार रोबोट
- रोबोटिक हाथ
- एक्सोस्केलेटन
- चतुर्भुज रोबोट
- एजीवी वाहन
- एआरयू रोबोट
एकीकरण समर्थन और पूर्व-बिक्री प्रश्नों के लिए, संपर्क करें [email protected] or देखें https://rcdrone.top/.
हस्तनिर्देश & डाउनलोड
- उच्च टॉर्क मोटर डिबगिंग सहायक उपयोगकर्ता मैनुअल (PDF)
- डिबगिंग मैनुअल (PDF)
- 1.2 fdcan प्रोटोकॉल विश्लेषण (PDF)
- उपयोगकर्ता मैनुअल (PDF)
- HTDW-6056-36-NE-JC 3D मॉडल (STP in ZIP)
विवरण

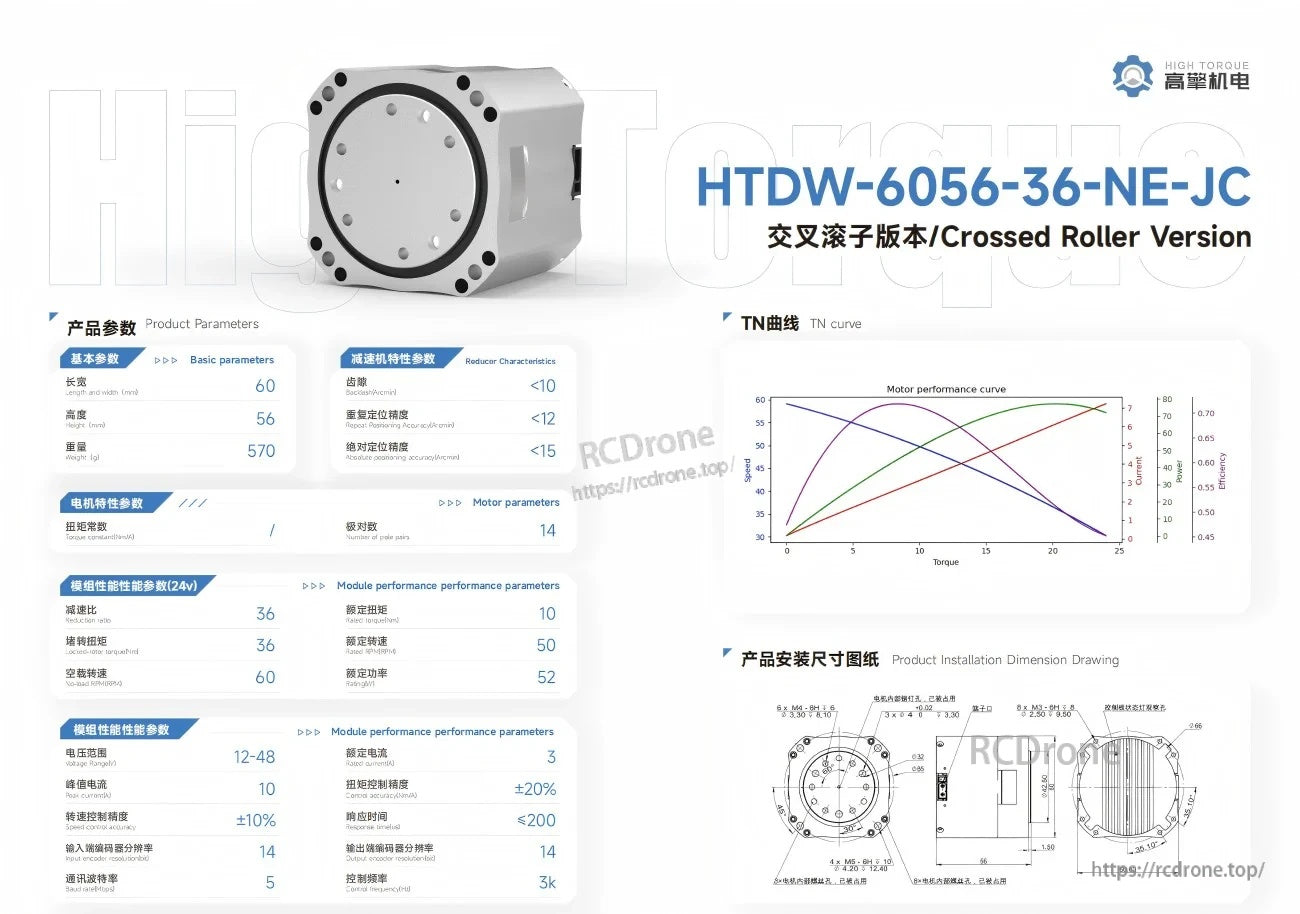
क्रॉस्ड रोलर संस्करण के लिए विस्तृत पैरामीटर और माउंटिंग आयाम एकीकरण से पहले फिट और प्रदर्शन की पुष्टि करने में मदद करते हैं।
Related Collections

