होलीब्रो ड्रोनकैन एम8एन जीपीएस मॉड्यूल - एसटीएम32जी4 प्रोसेसर बीएमएम150 कंपास 3जीएनएसएस ड्रोनकैन प्रोटोकॉल को सपोर्ट करता है
होलीब्रो ड्रोनकैन एम8एन जीपीएस मॉड्यूल - एसटीएम32जी4 प्रोसेसर बीएमएम150 कंपास 3जीएनएसएस ड्रोनकैन प्रोटोकॉल को सपोर्ट करता है
HolyBro
पिकअप उपलब्धता लोड नहीं की जा सकी
विवरण
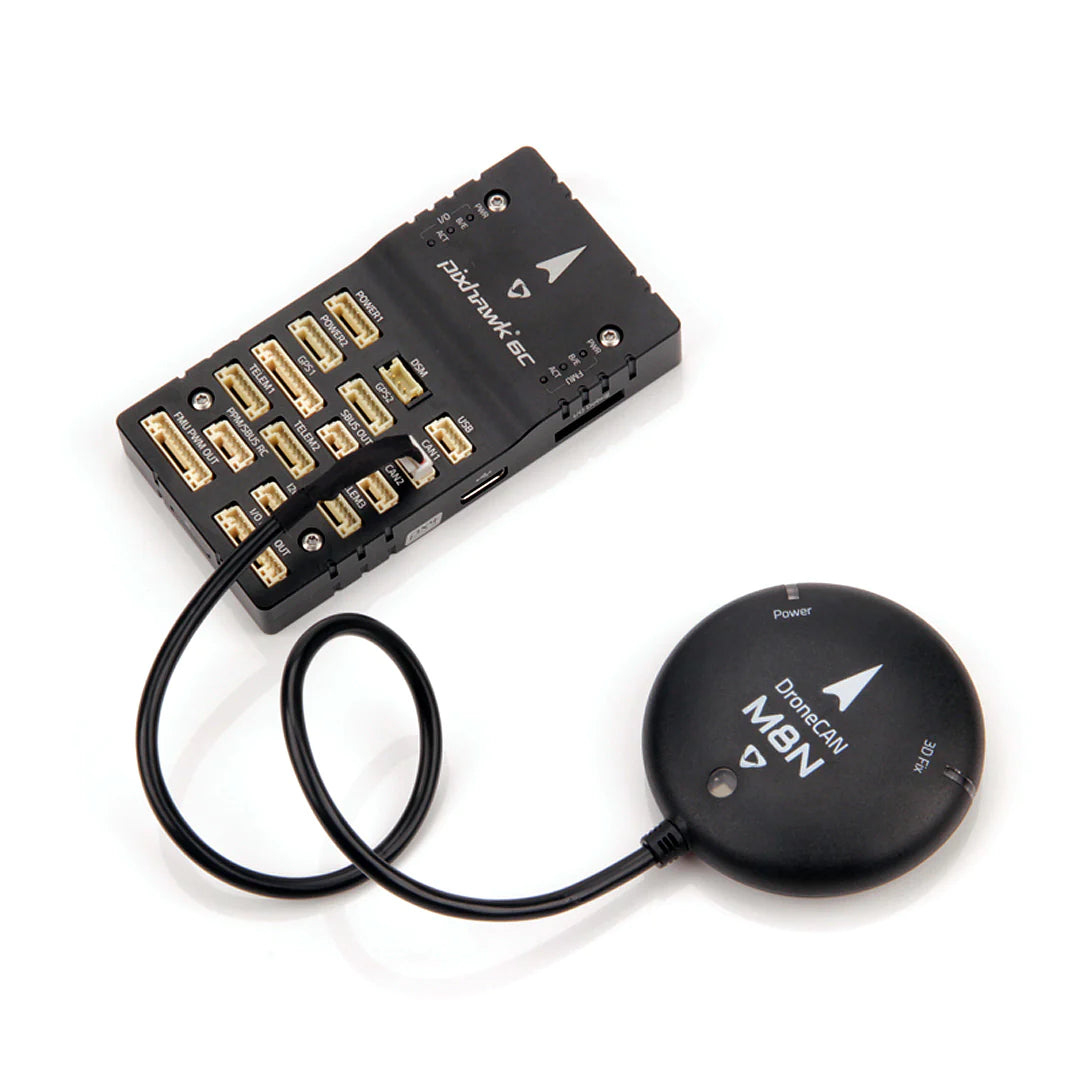
होलीब्रो ड्रोनकैन जीपीएस में एक यूबीएलओएक्स एम8एन या एम9एन मॉड्यूल, बीएमएम150 कंपास, त्रि-रंग एलईडी संकेतक है। इसमें STM32G4 प्रोसेसर है और संचार के लिए DroneCAN प्रोटोकॉल को अपनाया गया है, जो इसे सीरियल कनेक्शन की तुलना में विद्युत चुम्बकीय हस्तक्षेप से निपटने में अधिक विश्वसनीय और बेहतर बनाता है। यह उड़ान नियंत्रक के किसी भी सीरियल पोर्ट पर कब्जा नहीं करता है, और विभिन्न CAN उपकरणों को CAN स्प्लिटर बोर्ड के माध्यम से एक ही CAN बस से जोड़ा जा सकता है।
विनिर्देश:
| DroneCAN M8N | |
| जीएनएसएस रिसीवर | Ublox NEO M8N |
| समवर्ती GNSS की संख्या | 3 GNSS तक (GPS, गैलीलियो, ग्लोनास, BeiDou) |
| प्रोसेसर | STM32G4 (170MHz, 512K फ़्लैश) |
| कम्पास | बीएमएम150 |
| फ़्रीक्वेंसी बैंड | GPS: L1C/A ग्लोनास: L10F Beidou: B1I गैलीलियो: E1B/C |
| जीएनएसएस ऑग्मेंटेशन सिस्टम | SBAS: WAAS, EGNOS, MSAS, QZSS |
| नेविगेशन अपडेट | 5हर्ट्ज़ डिफ़ॉल्ट(10हर्ट्ज़ अधिकतम) |
| सटीकता | 2.5m |
| गति सटीकता | 0.05 मी/से |
| अधिकतम # उपग्रह | 22+ |
| संचार प्रोटोकॉल | ड्रोनकैन @ 1 एमबीटी/एस |
| ऑटोपायलट परिवार कल्याण का समर्थन करता है | PX4, Ardupilot |
| पोर्ट प्रकार | GHR-04V-S |
| एंटीना | 25 x 25 x 4 मिमी सिरेमिक पैच एंटीना |
| बिजली की खपत | 200mA @ 5V से कम |
| वोल्टेज | 4.7-5.2V |
| ऑपरेटिंग तापमान | -40~80C |
| आकार | व्यास: 54mm मोटाई: 14.5mm |
| वजन | 36 ग्राम |
| केबल की लंबाई | 26 सेमी |
| अन्य नोट्स | - LNA MAX2659ELT+ आरएफ एम्पलीफायर - रिचार्जेबल फराह कैपेसिटेंस - कम शोर 3.3V रेगुलेटर |
अन्य तकनीकी जानकारी के लिए, कृपया https://docs.holybro.com/ पर जाएं
DroneCAN
DroneCAN प्राथमिक CAN प्रोटोकॉल है जिसका उपयोग ArduPilot और PX4 परियोजनाओं द्वारा CAN बाह्य उपकरणों के साथ संचार के लिए किया जाता है। यह खुले संचार, विनिर्देश और कई खुले कार्यान्वयन के साथ एक खुला प्रोटोकॉल है।
ड्रोनकैन विकास
DroneCAN परियोजना में एक सक्रिय विकास समुदाय है।
- कलह पर चर्चा https://dronecan.org/discord
- github पर विकास https://github.com/DroneCAN
Related Collections