





होलीब्रो पिक्स32 वी6 उड़ान नियंत्रक - आधारित एसटीएम32एच743 एफसी मॉड्यूल मानक सेट मिनी सेट एम8एन/एम9एन/एम10 जीपीएस के साथ
होलीब्रो पिक्स32 वी6 उड़ान नियंत्रक - आधारित एसटीएम32एच743 एफसी मॉड्यूल मानक सेट मिनी सेट एम8एन/एम9एन/एम10 जीपीएस के साथ
HolyBro
पिकअप उपलब्धता लोड नहीं की जा सकी
Pix32 v6, pix32 v5 उड़ान नियंत्रकों का नवीनतम अद्यतन है। यह Pixhawk 6C का एक वेरिएंट है। इसमें एक अलग उड़ान नियंत्रक और वाहक बोर्ड शामिल है जो 100 पिन कनेक्टर द्वारा जुड़े हुए हैं। यह उन पायलटों के लिए डिज़ाइन किया गया है जिन्हें उच्च शक्ति, लचीली और अनुकूलन योग्य उड़ान नियंत्रण प्रणाली की आवश्यकता होती है।
Pix32 v6 के अंदर, आप एक STMicroelectronics® आधारित STM32H743 पा सकते हैं, जो बॉश® और InvenSense® की सेंसर तकनीक के साथ जोड़ा गया है, जो आपको किसी भी स्वायत्त वाहन को नियंत्रित करने के लिए लचीलापन और विश्वसनीयता प्रदान करता है, जो शैक्षणिक और वाणिज्यिक दोनों अनुप्रयोगों के लिए उपयुक्त है।
Pix32 v6 के H7 माइक्रोकंट्रोलर में Arm® Cortex®-M7 कोर है जो 480 MHz तक चलता है, इसमें 2MB फ़्लैश मेमोरी और 1MB RAM है। अद्यतन प्रसंस्करण शक्ति के लिए धन्यवाद, डेवलपर्स जटिल एल्गोरिदम और मॉडल की अनुमति देकर अपने विकास कार्य के साथ अधिक उत्पादक और कुशल हो सकते हैं। इसमें बोर्ड पर उच्च प्रदर्शन, कम शोर वाले आईएमयू शामिल हैं, जिन्हें आईएमयू अतिरेक के साथ लागत प्रभावी बनाने के लिए डिज़ाइन किया गया है। उच्च-आवृत्ति कंपन को फ़िल्टर करने और सटीक रीडिंग सुनिश्चित करने के लिए शोर को कम करने के लिए एक कंपन अलगाव प्रणाली, जिससे वाहनों को बेहतर समग्र उड़ान प्रदर्शन तक पहुंचने की अनुमति मिलती है।
यह उड़ान नियंत्रक उन लोगों के लिए एकदम सही है जो एक किफायती और मॉड्यूलर उड़ान की तलाश में हैं नियंत्रक जो अनुकूलित बेसबोर्ड का उपयोग कर सकता है। हमने Pix32 v6 बेस बोर्ड स्कीमैटिक्स को सार्वजनिक कर दिया है, आप या तो स्वयं एक कस्टम कैरियर बोर्ड बना सकते हैं या हमें इसमें आपकी मदद करने दे सकते हैं। अनुकूलित बेसबोर्ड का उपयोग करके, आप यह सुनिश्चित कर सकते हैं कि भौतिक आकार, पिनआउट और बिजली वितरण आवश्यकताएं आपके वाहन से पूरी तरह से मेल खाती हैं, यह सुनिश्चित करते हुए कि आपके पास सभी आवश्यक कनेक्शन हैं और कोई भी खर्च और कनेक्टर्स का बड़ा हिस्सा आपके पास नहीं है।
मुख्य डिज़ाइन बिंदु:
- अधिक कंप्यूटिंग शक्ति और रैम के साथ उच्च प्रदर्शन STM32H743 प्रोसेसर
- लो-प्रोफाइल फॉर्म फैक्टर के साथ नया लागत प्रभावी डिज़ाइन
- उच्च आवृत्ति कंपन को फ़िल्टर करने और सटीक रीडिंग सुनिश्चित करने के लिए शोर को कम करने के लिए नई डिज़ाइन की गई एकीकृत कंपन अलगाव प्रणाली
- IMU का तापमान ऑनबोर्ड हीटिंग रेसिस्टर्स द्वारा नियंत्रित किया जाता है, जिससे IMU का इष्टतम कार्य तापमान संभव होता है
नोट:
- पावर मॉड्यूल तुलना चार्ट
- M10 GPS की आवश्यकता है PX4 1.14, ArduPilot 4.3 या नया आवश्यक है। (7 सितंबर 2023 तक, पीएक्स4 ने 1.14 आरसी1 (रिलीज़ उम्मीदवार) जारी कर दिया है। कृपया नवीनतम रिलीज़ विवरण के लिए इस लिंक को देखें। आरसी रिलीज़ को फ्लैश करने के तरीके के बारे में अधिक विवरण यहां पाया जा सकता है।)
दी गई संदर्भ डिज़ाइन फ़ाइल का उपयोग करके, आसानी से अपना स्वयं का कस्टम बेसबोर्ड डिज़ाइन करें।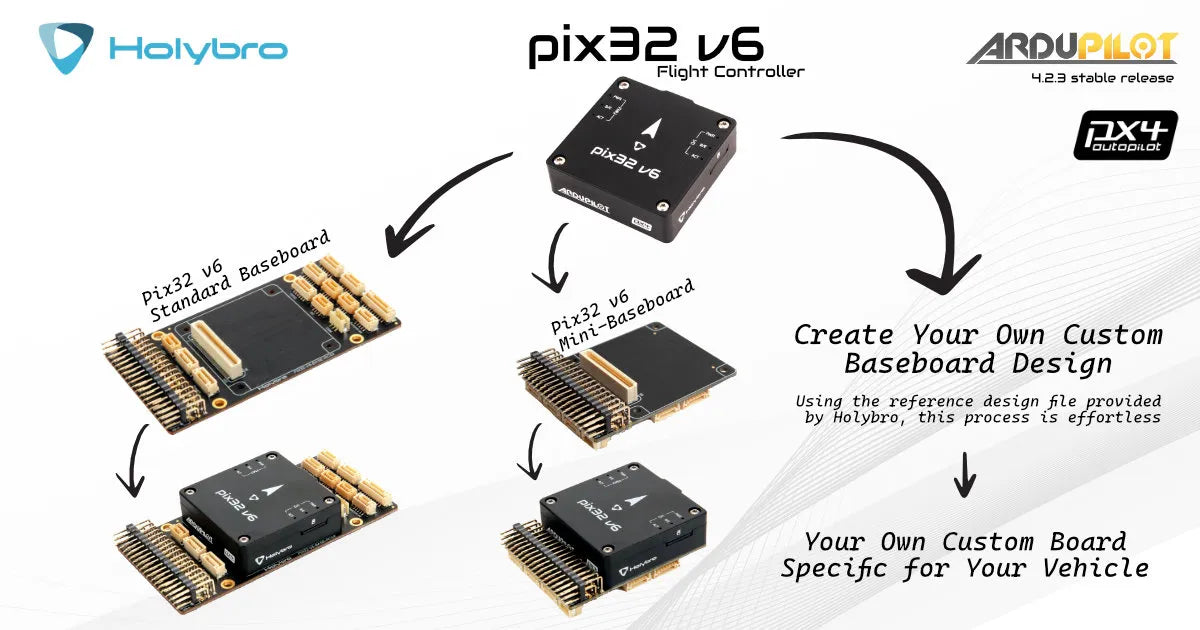
SKU20190/20192 शामिल है:
- Pix32 v6 फ्लाइट कंट्रोलर मॉड्यूल
- मानक बेसबोर्ड / मिनी बेसबोर्ड
- PM02 V3 12S पावर मॉड्यूल
- मानक केबल सेट
SKU20191/SKU20193 शामिल है:
- Pix32 v6 फ्लाइट कंट्रोलर मॉड्यूल
- मानक बेसबोर्ड / मिनी बेसबोर्ड
- PM02 V3 12S पावर मॉड्यूल
- मिनी केबल सेट
- एम8एन जीपीएस//एम9एन जीपीएस/एम10 जीपीएस
नोट: Pix32v6 मानक सेट अगली सूचना तक Pix32v5 बेसबोर्ड के साथ भेजा जाएगा, बेसबोर्ड के संबंध में अतिरिक्त जानकारी के लिए कृपया यहां देखें।
Related Collections












