Holybro Pixhawk 6X (ICM-45686) फ्लाइट कंट्रोलर – ट्रिपल रेडंडेंट IMU, STM32H753, ईथरनेट, PX4 और ArduPilot संगत
Holybro Pixhawk 6X (ICM-45686) फ्लाइट कंट्रोलर – ट्रिपल रेडंडेंट IMU, STM32H753, ईथरनेट, PX4 और ArduPilot संगत
HolyBro
पिकअप उपलब्धता लोड नहीं की जा सकी
अवलोकन
होलिब्रो पिक्सहॉक 6X (ICM-45686) एक उच्च-प्रदर्शन, मॉड्यूलर ऑटोपायलट उड़ान नियंत्रक है जिसे औद्योगिक और वाणिज्यिक ड्रोन अनुप्रयोगों के लिए डिज़ाइन किया गया है। इसमें ट्रिपल-रिडंडेंट ICM-45686 IMUs हैं, जो BalancedGyro™ तकनीक, डुअल बैरोमीटर और 480 MHz पर चलने वाले STM32H753 प्रोसेसर के साथ आते हैं, पिक्सहॉक 6X अद्वितीय विश्वसनीयता, वास्तविक समय प्रदर्शन और लचीलापन प्रदान करता है। इसकी मॉड्यूलर आर्किटेक्चर, उन्नत कंपन अलगाव, और ईथरनेट इंटरफेस इसे UAV सिस्टम के लिए आदर्श बनाते हैं, जिन्हें मजबूत नियंत्रण, सटीकता और मिशन अनुकूलन की आवश्यकता होती है।
मुख्य विशेषताएँ
-
ट्रिपल IMU रेडंडेंसी: 3x ICM-45686 IMUs (±32g) बैलेंस्डजाइरो™ तकनीक के साथ दोष-प्रतिरोधी जड़त्वीय नेविगेशन के लिए
-
डुअल बैरोमीटर: ICP20100 और BMP388 उन्नत ऊँचाई सटीकता के लिए
-
उच्च-गति प्रोसेसर: STM32H753 Cortex-M7, 480MHz, 2MB फ्लैश और 1MB RAM के साथ
-
मॉड्यूलर डिज़ाइन: FMU, IMU, और बेसबोर्ड को अलग करता है, 100-पिन और 50-पिन Pixhawk® बस के माध्यम से जुड़े हुए
-
तापमान-नियंत्रित IMU बोर्ड: तापमान रेंज में इष्टतम सेंसर प्रदर्शन सुनिश्चित करता है
-
ईथरनेट एकीकरण: मिशन कंप्यूटर के साथ उच्च-गति संचार का समर्थन करता है
-
डिजिटल पावर मॉड्यूल समर्थन: अधिक सटीक वोल्टेज और करंट माप प्रदान करता है
उन्नत पृथक्करण प्रणाली: टिकाऊ, कस्टम-फॉर्म्युलेटेड सामग्री उच्च-स्पेक्ट्रम कंपन डंपिंग प्रदान करती है
-
फर्मवेयर संगतता: PX4 (v1.14.3+), ArduPilot (v4.5. का समर्थन करता है।0+)
विशेषताएँ
प्रोसेसर और सेंसर
| घटक | विवरण |
|---|---|
| FMU प्रोसेसर | STM32H753, ARM Cortex-M7, 480MHz, 2MB फ्लैश, 1MB RAM |
| IO प्रोसेसर | STM32F103, ARM Cortex-M3, 72MHz |
| IMU सेंसर | 3x ICM-45686 (BalancedGyro™) |
| बारोमीटर | ICP20100 & BMP388 |
| मैग्नेटोमीटर | BMM150 |
| सुरक्षित तत्व | NXP SE050 प्लग & ट्रस्ट |
इलेक्ट्रिकल पैरामीटर
| पैरामीटर | Value |
|---|---|
| अधिकतम इनपुट वोल्टेज | 6V |
| यूएसबी पावर इनपुट | 4.75~5.25V |
| सर्वो रेल वोल्टेज | 0~36V |
| Telem1 और GPS2 वर्तमान सीमा | 1.5A संयुक्त |
| अन्य पोर्ट्स वर्तमान सीमा | 1.5A संयुक्त |
| PWM सिग्नल वोल्टेज | डिफ़ॉल्ट 3.3V (प्रतिरोध के माध्यम से 5V में स्विच करने योग्य) |
| संचालन तापमान | -25°C से +85°C |
यांत्रिक आयाम और वजन
| घटक | आयाम (मिमी) | वजन (ग्राम) |
|---|---|---|
| उड़ान नियंत्रक | 38.8 x 31.8 x 16.8 | 31.3g |
| मानक बेसबोर्ड | 52.4 x 102 x 16.7 | 72.5g |
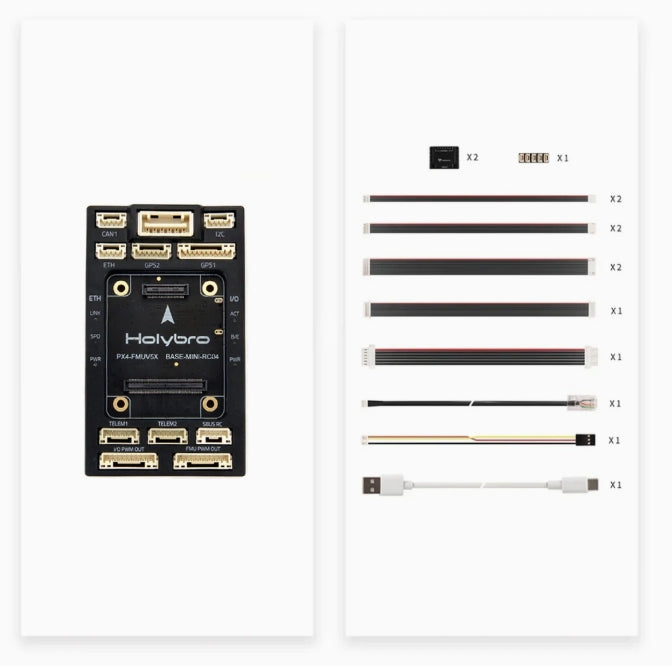
| मिनी बेसबोर्ड | 43.4 x 72.8 x 14.2 | 26.5g |
फर्मवेयर संगतता
-
PX4: संस्करण 1.14.3 और ऊपर से पूरी तरह समर्थित
-
ArduPilot: संस्करण 4.5 से पूरी तरह समर्थित।0 और ऊपर
-
फर्मवेयर फ्लैशिंग का समर्थन मिशन प्लानर या क्यूग्राउंडकंट्रोल
अनुप्रयोग
एकीकरण के लिए आदर्श:
-
औद्योगिक ड्रोन
-
व्यावसायिक UAV सिस्टम
-
VTOL विमान
-
शैक्षणिक अनुसंधान प्लेटफार्म
-
मल्टी-सेंसर और उच्च-विश्वसनीयता मिशन
विवरण

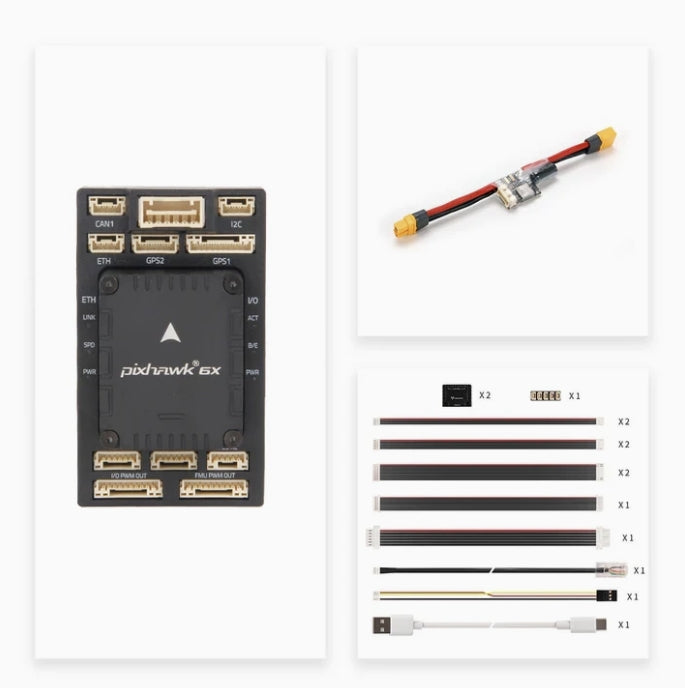
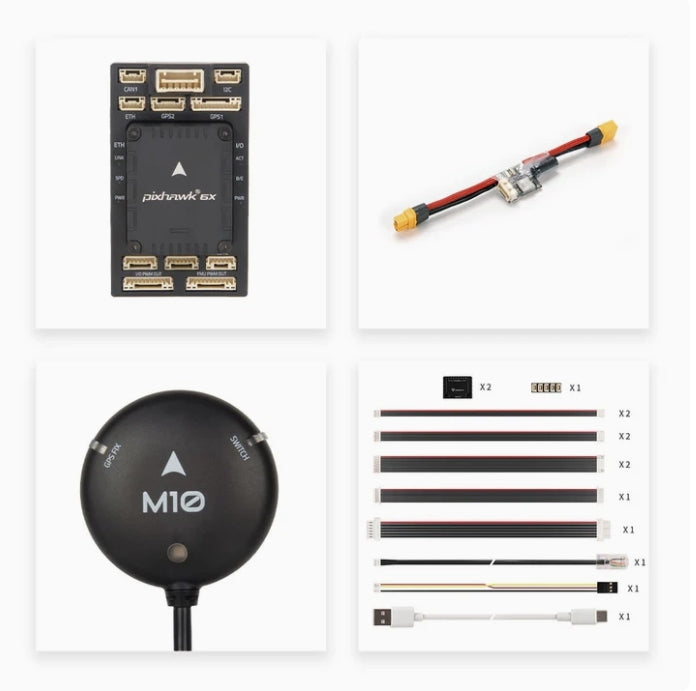
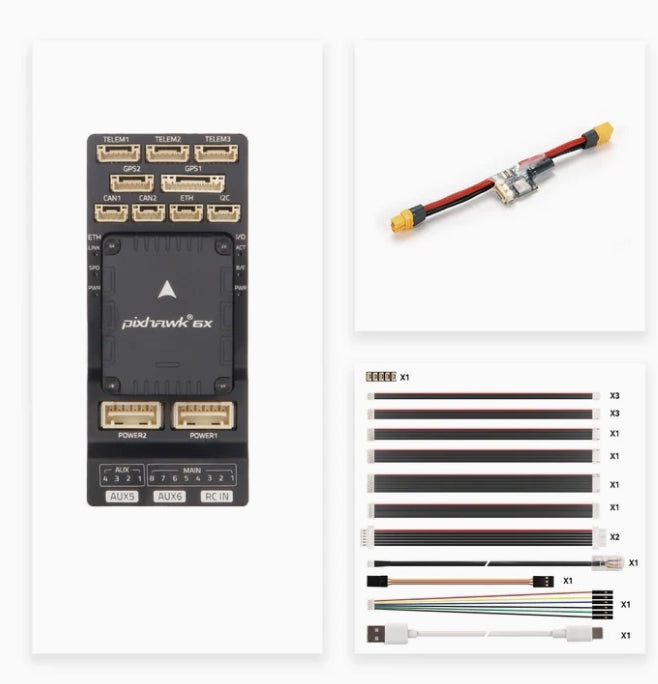
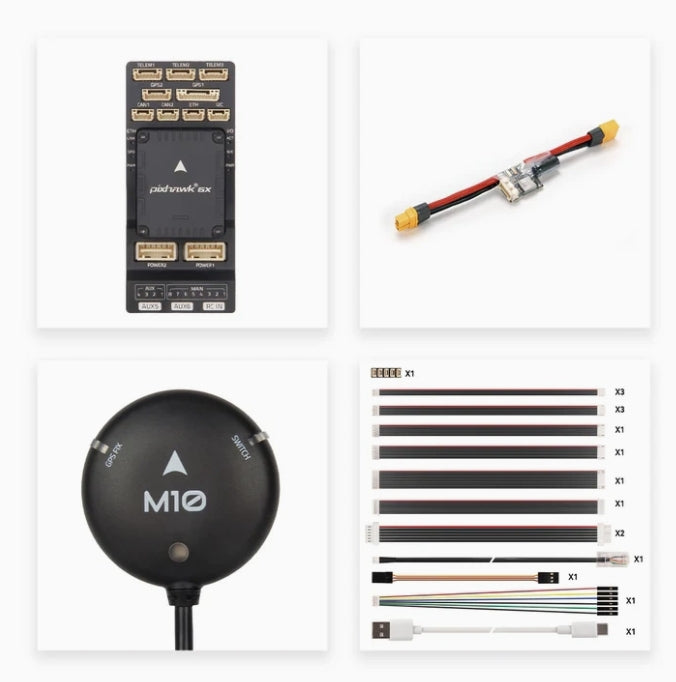
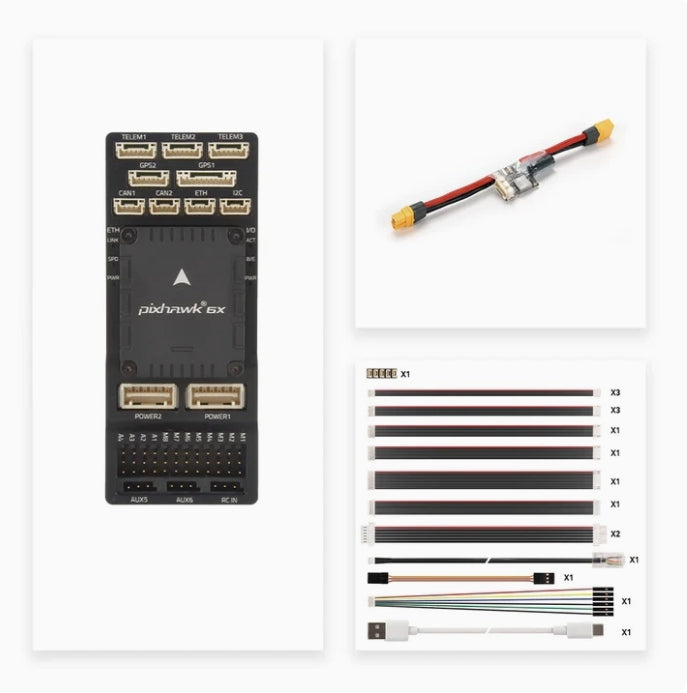
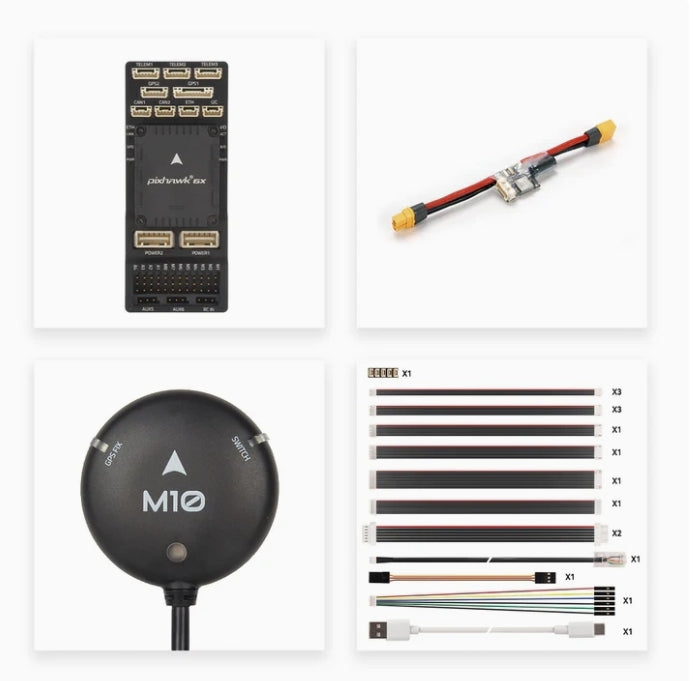
पिक्सहॉक 6X एक पतला डिज़ाइन प्रदान करता है जिसमें दो मॉडल हैं। इसमें बेहतर कनेक्टिविटी और प्रदर्शन के लिए एक उन्नत पिन हेडर है, जो इसे उन्नत अनुप्रयोगों के लिए आदर्श बनाता है। अपनी आवश्यकताओं के लिए सही मॉडल चुनें।
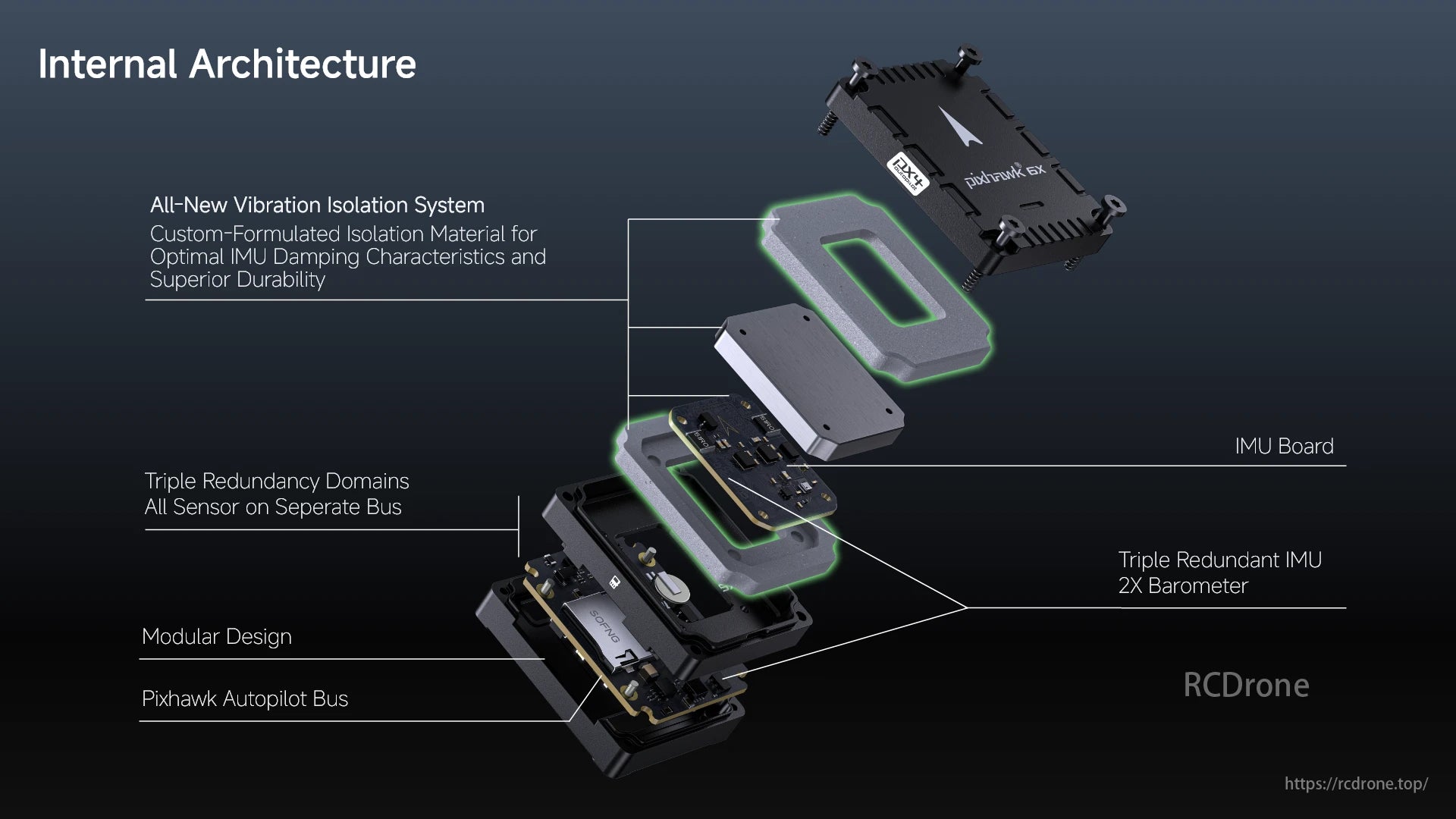
होलिब्रो पिक्सहॉक 6X कंपन अलगाव, त्रैतीय अतिरिक्तता, मॉड्यूलर डिज़ाइन, ऑटोपायलट बस, IMU बोर्ड, और उन्नत प्रदर्शन के लिए 2x बैरोमीटर प्रदान करता है।
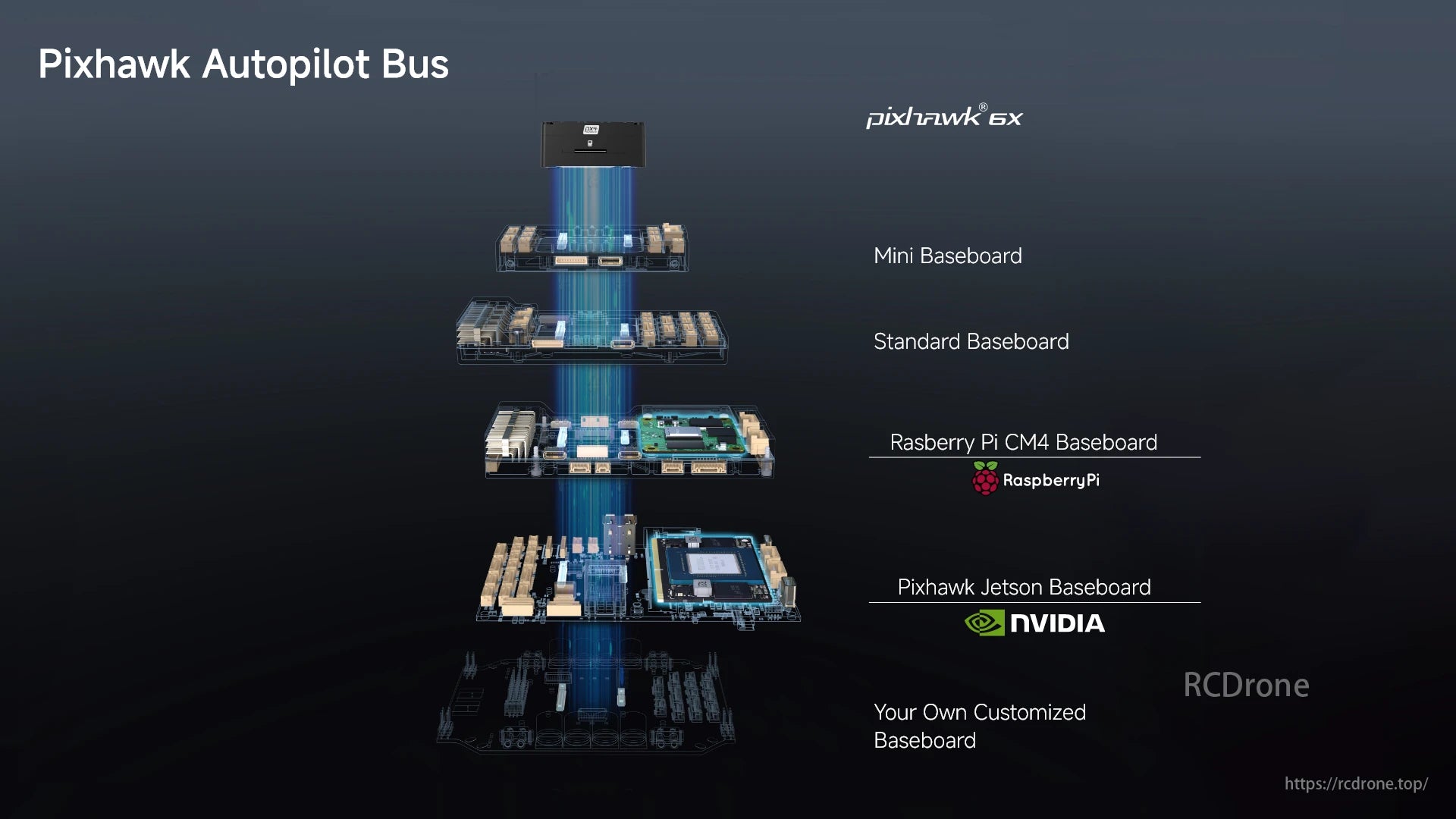
पिक्सहॉक ऑटोपायलट बस में पिक्सहॉक 6X, मिनी बेसबोर्ड, मानक बेसबोर्ड, रास्पबेरी पाई CM4 बेसबोर्ड, जेटसन बेसबोर्ड, और कस्टम विकल्प शामिल हैं।

तापमान मुआवजा प्रतिरोधक, अतिरिक्त IMU और बैरोमीटर, विविध सेंसर प्रौद्योगिकियाँ, और अलगाव सामग्री सटीकता सुनिश्चित करती हैं।

पिक्सहॉक ऑटोपायलट बस, STM H753 32-बिट प्रोसेसर (480 मेगाहर्ट्ज), इन्वेन्सेंस ICM45686 IMU बैलेंस्डगायरो प्रौद्योगिकी के साथ, और NXP EdgeLock SE050 सुरक्षित तत्व FMU बोर्ड में एकीकृत हैं।
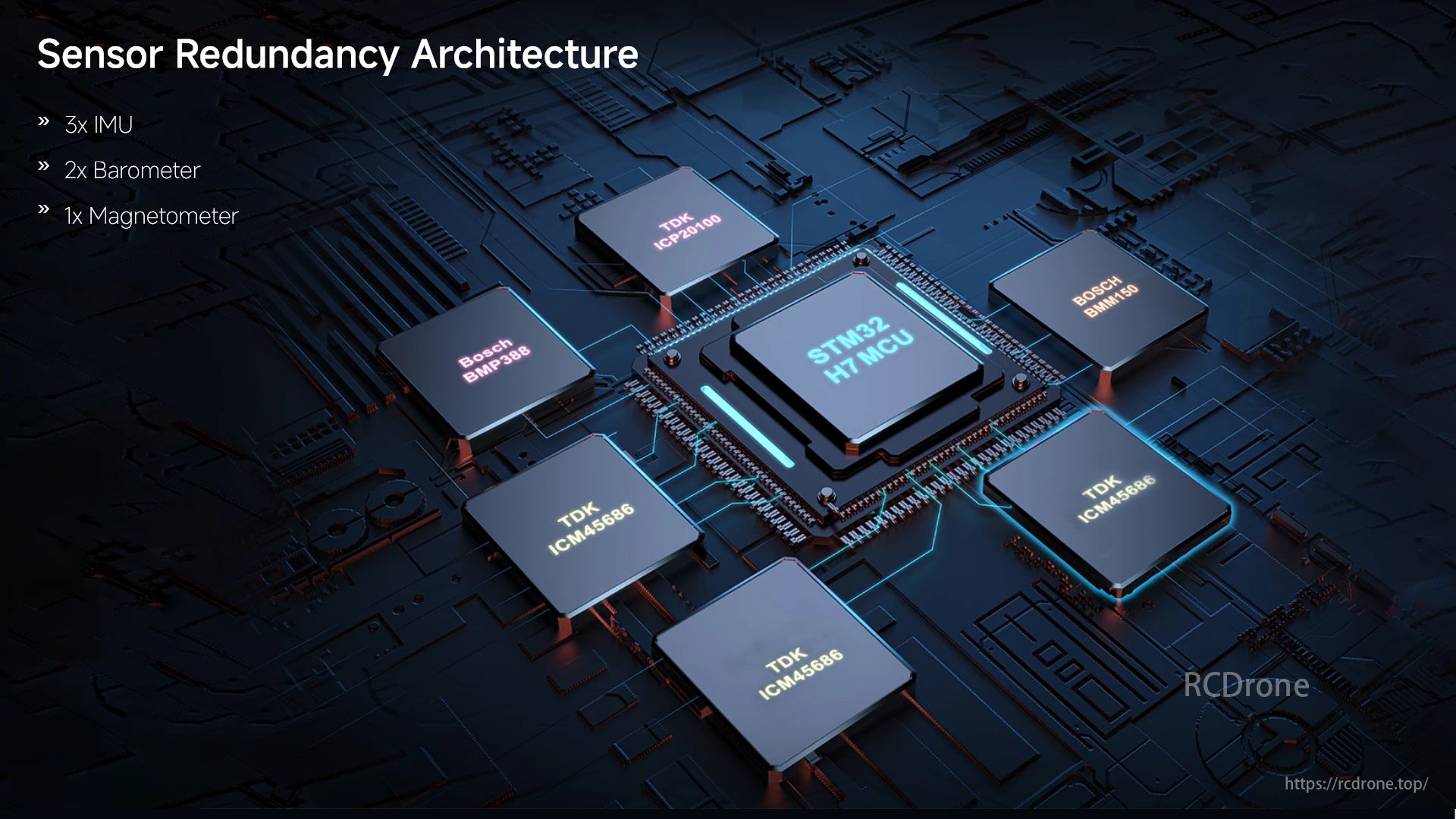
सेंसर अतिरिक्तता आर्किटेक्चर 3x IMU, 2x बैरोमीटर, और 1x मैग्नेटोमीटर के साथ।विशेषताएँ STM32 H7 MCU, TDK ICM-45686, Bosch BMP388, और BMM50 सेंसर के साथ बेहतर प्रदर्शन के लिए।
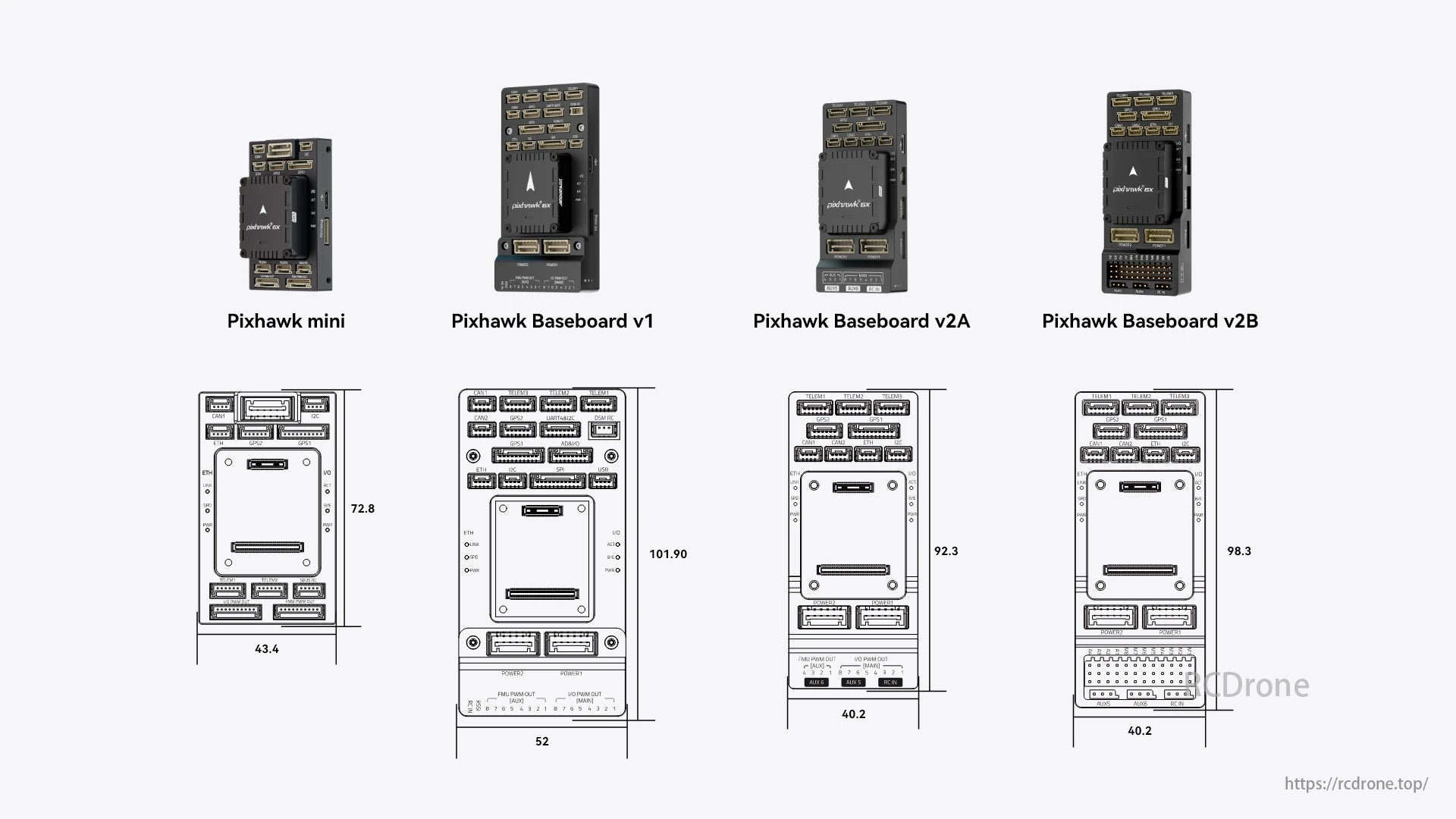
Pixhawk मिनी, बेसबोर्ड v1, v2A, और v2B उड़ान नियंत्रक जिनका आकार: 43.4x72.8, 52x101.90, 40.2x92.3, और 40.2x98.3 है। प्रत्येक मॉडल पर विभिन्न पोर्ट और कनेक्टर्स दिखाई दे रहे हैं।
Related Collections