







LINKERBOT लिंकर्स हैंड L6 रोबोट हैंड, 6 डिग्री फ्रीडम, CAN, लिंकज ड्राइव, 50N पकड़, ±0.2mm पुनरावृत्ति
LINKERBOT लिंकर्स हैंड L6 रोबोट हैंड, 6 डिग्री फ्रीडम, CAN, लिंकज ड्राइव, 50N पकड़, ±0.2mm पुनरावृत्ति
LINKERBOT
पिकअप उपलब्धता लोड नहीं की जा सकी
अवलोकन
LINKERBOT Linker Hand L6 एक कुशल रोबोट हाथ है जिसे सटीक संचालन के लिए डिज़ाइन किया गया है। इसमें 6 स्वतंत्रता के डिग्री (DoF) और 11 जोड़ों (6 सक्रिय + 5 निष्क्रिय) के साथ एक लिंक ट्रांसमिशन और CAN नियंत्रण इंटरफेस है। उत्पाद छवियों में दिखाया गया ढांचा सभी-मेटल अंगुलियों, अंगुलियों पर पहनने के लिए प्रतिरोधी सिलिकॉन, पांच-उंगली स्पर्श दबाव सेंसर, संकेतक लाइटें, एक एंटी-पिंच आधा-हाथ रबर पैड, और एक उच्च-सटीक इलेक्ट्रिक सिलेंडर डायरेक्ट ड्राइव को उजागर करता है।
मुख्य विशेषताएँ
- 6 DoF कुशल संचालन; 11 जोड़ों (6 सक्रिय + 5 निष्क्रिय)।
- CAN बस नियंत्रण के साथ लिंक ट्रांसमिशन।
- दोहराने की स्थिति सटीकता: ±0.2 मिमी।
- बल क्षमता: अंगूठे की अधिकतम टिप बल 10N; चार अंगुलियों की अधिकतम टिप बल 8N; अधिकतम पांच-उंगली पकड़ने की बल 50N।
- संपर्क/दबाव माप के लिए पाईज़ोरेसिस्टिव पांच-उंगली स्पर्श संवेदक सरणी।
- डिज़ाइन तत्व दिखाए गए: सभी-धातु की अंगुलियाँ, पहनने-प्रतिरोधी सिलिकॉन टिप्स, संकेतक लाइट, एंटी-पिंच रबर पैड।
- संक्षिप्त &और चपल लेआउट; बहु-संवेदक प्रणाली (कैमरों और इलेक्ट्रॉनिक त्वचा सहित) और उत्पाद चित्रण में दिखाए गए उपकरण-क्लाउड एकीकरण।
बिक्री और तकनीकी सहायता के लिए, संपर्क करें [email protected] or देखें https://rcdrone.top/।
विशेषताएँ
| पैरामीटर | मान |
|---|---|
| स्वतंत्रता के डिग्री (DoF) | 6 |
| जोड़ों की संख्या | 11 (6 सक्रिय + 5 निष्क्रिय) |
| संक्रमण मोड | लिंक ट्रांसमिशन |
| नियंत्रण इंटरफेस | CAN |
| वजन | 623.5g |
| अधिकतम लोड | 28kg |
| ऑपरेटिंग वोल्टेज | DC24V±10% |
| स्थैतिक करंट | 0.2A |
| औसत करंट (नो-लोड मूवमेंट) | 0.75A |
| अधिकतम करंट | 1.4A |
| दोहराने की स्थिति सटीकता | ±0.2mm |
| अधिकतम अंगूठे की टिप बल | 10N |
| चार अंगुलियों की अधिकतम टिप बल | 8N |
| पांच अंगुलियों की अधिकतम पकड़ बल | 50N |
गति प्रदर्शन
| गति भाग | कोण सीमा (°) | गति गति (°/सेकंड) |
|---|---|---|
| अंगूठे का आधार | 57 | 152.82 |
| सूचक अंगुली का आधार | 72.30 | 213.27 |
| मध्य अंगुली का आधार | 72.90 | 208.29 |
| रिंग अंगुली का आधार | 73.10 | 202.49 |
| छोटी अंगुली का आधार | 72.60 | 201.11 |
| अंगूठे की टिप | 69.90 | 192.84 |
| इंडेक्स फिंगर का टिप | 64.60 | 192.84 |
| मिडिल फिंगर का टिप | 65.10 | 185.32 |
| रिंग फिंगर का टिप | 66.90 | 185.32 |
| लिटिल फिंगर का टिप | 66.70 | 184.76 |
| थंब का साइड स्विंग | 80 | 235.29 |
| खुलने और बंद होने का समय | - | 0.35s |
सेंसर
| पैरामीटर | विशेष विवरण |
|---|---|
| पाईज़ोरेसिस्टिव एरे | 6*12 |
| सेंसर फोर्स-बेयरिंग एरिया | 9.6*14.4mm |
| ट्रिगर बल | 5g |
| मापने की सीमा | 20N |
| सेवा जीवन | 100,000 चक्र |
| संचार फ्रेम दर | 200FPS |
| मान सीमा | 0~4095 |
आकृति आयाम
| परिभाषा | पैरामीटर (मिमी) |
|---|---|
| मध्य अंगुली की टिप से हथेली के आधार तक की लंबाई | 190.7 |
| अधिकतम हथेली चौड़ाई | 121 |
| अंगूठे की टिप से हथेली के आधार तक की लंबाई | 134.3 |
| कलाई की ऊँचाई | 9. |
| कलाई का व्यास | 60 |
क्या शामिल है
- USB‑से‑CAN डिबगिंग केबल x1
- कनेक्टर केबल XT30 (2+2) x1
- पावर एडाप्टर x1
- पावर केबल x1
- लिंकर हैंड L6 x1
अनुप्रयोग
- सटीक पकड़ और वस्तु हैंडलिंग
- उपकरण पकड़ना और संचालन
- घटक उठाने और रखने के कार्य
हस्तनिर्देश
लिंकर हैंड L6 उत्पाद मैनुअल (PDF)
विवरण


6 डिग्री स्वतंत्रता के साथ उच्च-प्रदर्शन कुशल रोबोटिक हाथ। इसमें कॉम्पैक्ट चपलता, मल्टी-सेंसर प्रणाली, और सटीक नियंत्रण, पर्यावरण अनुकूलन, और क्लाउड स्किल लाइब्रेरी के माध्यम से कोड-फ्री अनुकूलन के लिए डिवाइस-क्लाउड एकीकरण की विशेषताएँ हैं।



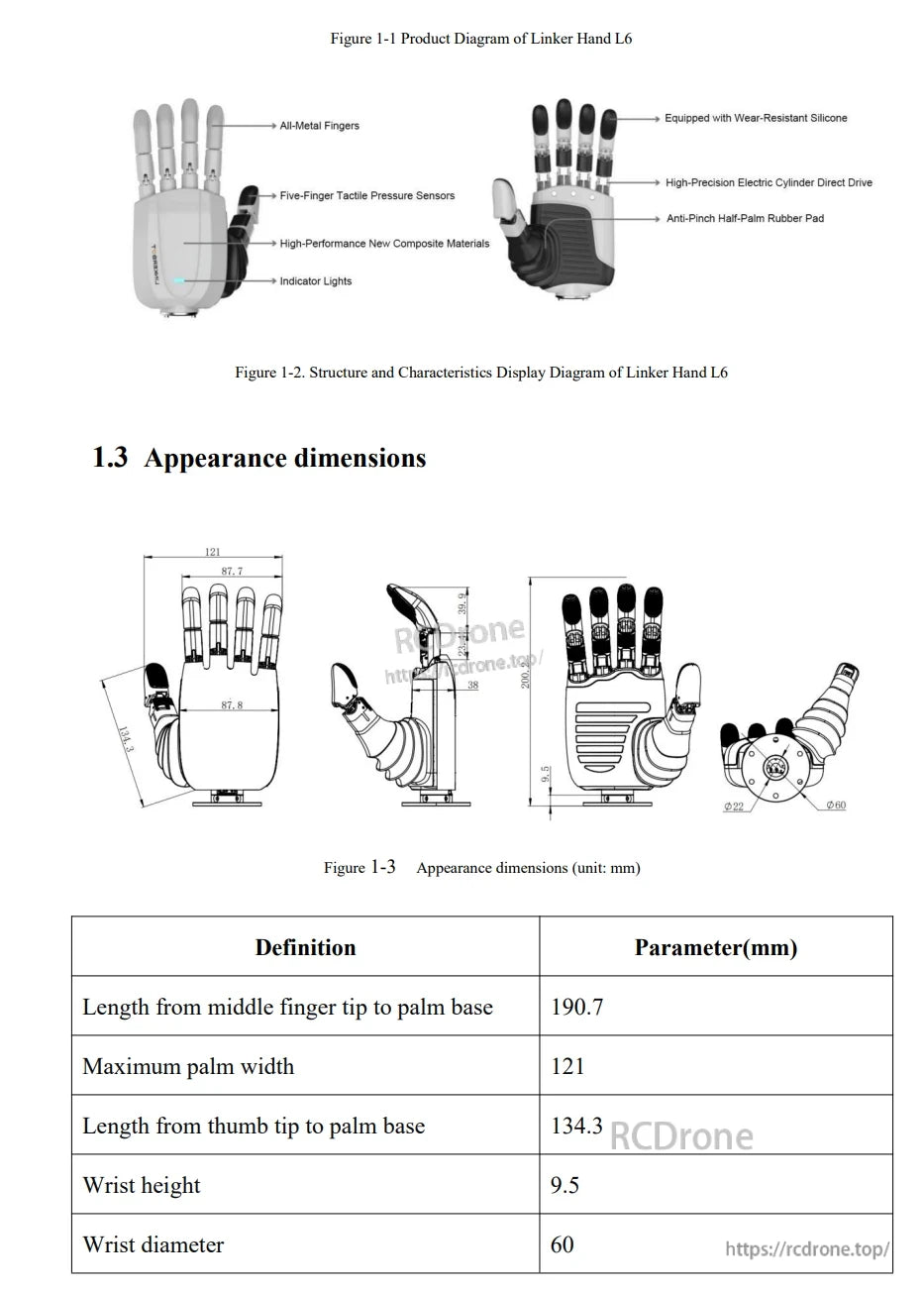
Linker Hand L6 में सभी धातु की अंगुलियाँ, स्पर्श संवेदक, पहनने के लिए प्रतिरोधी सिलिकॉन, इलेक्ट्रिक सिलेंडर ड्राइव, और एंटी-पिंच रबर पैड हैं। अंगुली की लंबाई: 190.7 मिमी; हथेली की चौड़ाई: 121 मिमी; कलाई का व्यास: 60 मिमी।
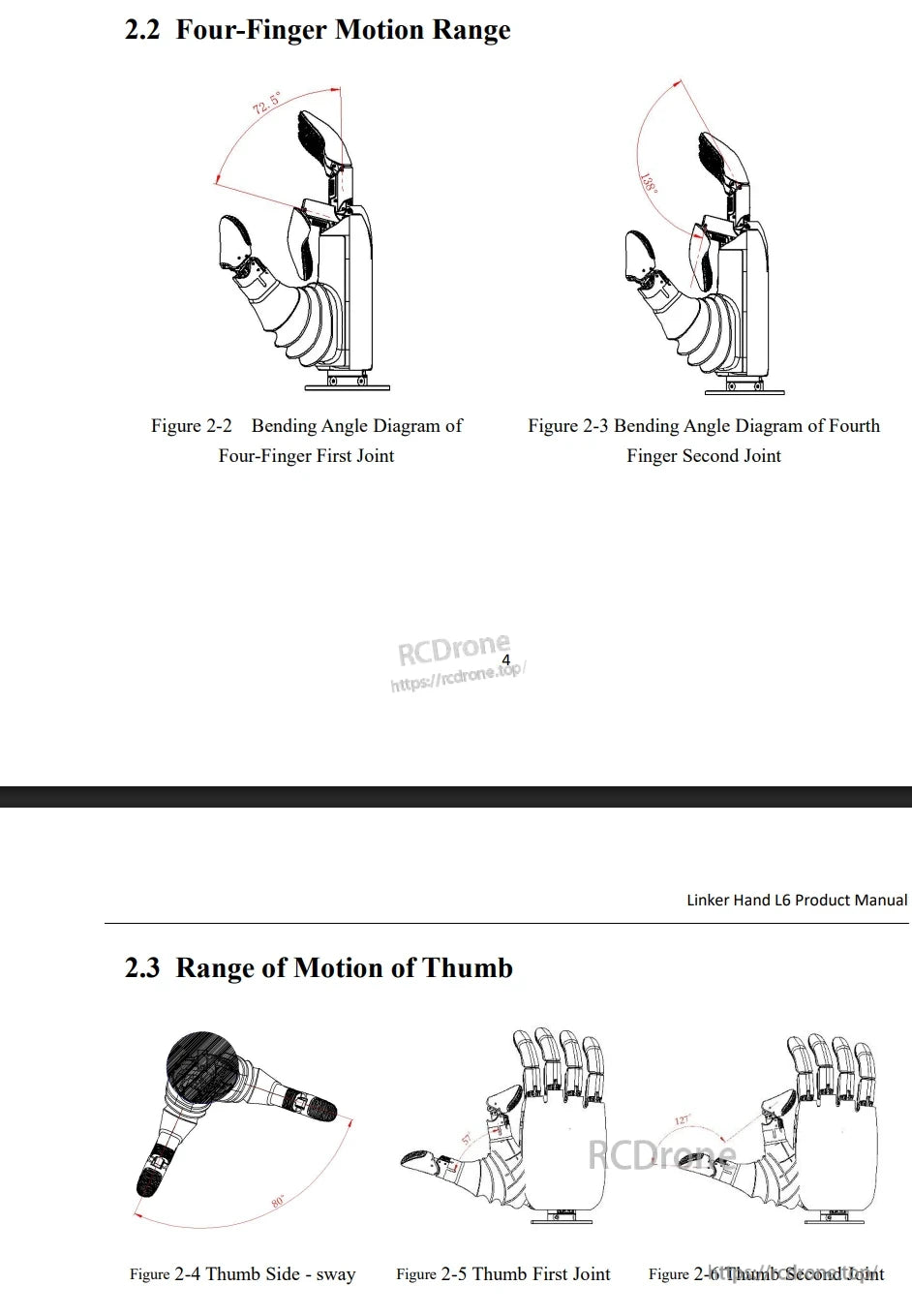
अंगुली और अंगूठे के जोड़ की गति की सीमा: चार-अंगुली पहले जोड़ 72.5°, दूसरे जोड़ 138°; अंगूठे की साइड-स्वे 80°, पहले जोड़ 57°, दूसरे जोड़ 127°।
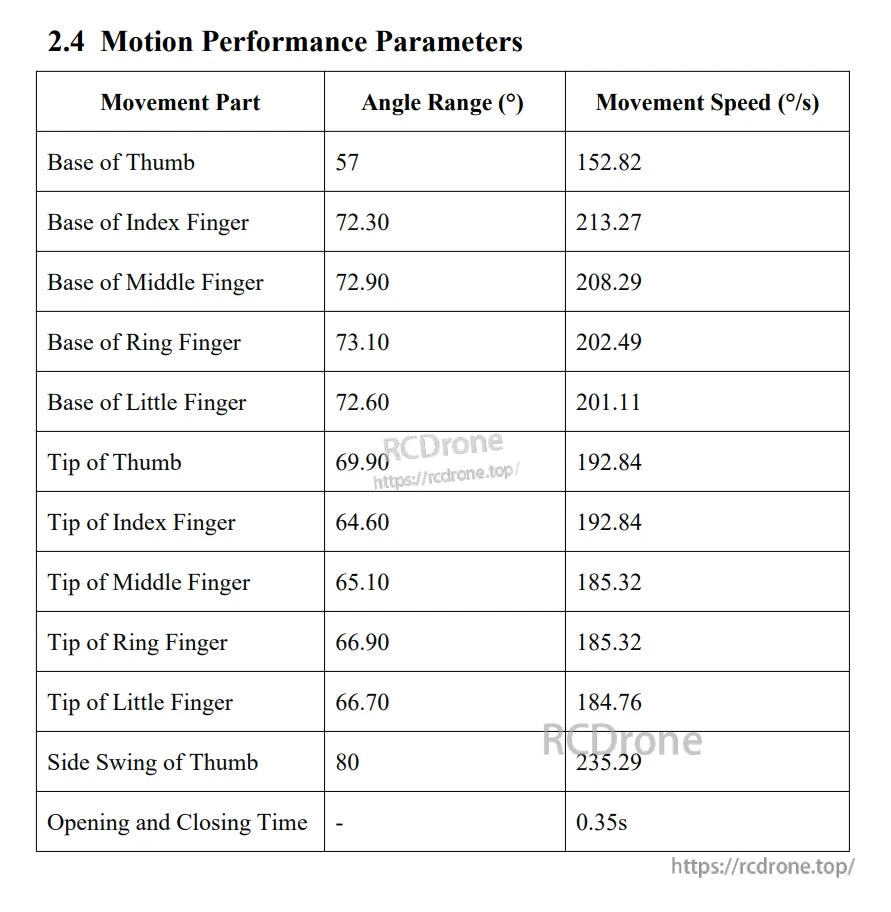
रोबोटिक हाथ की अंगुली की गति के पैरामीटर: अंगूठे का झूलना 235.29°/सेकंड, खोलना/बंद करना 0.35 सेकंड में—विस्तृत जोड़ कोण की सीमाओं और गति के साथ सटीक आर्टिकुलेशन को प्रदर्शित करना।
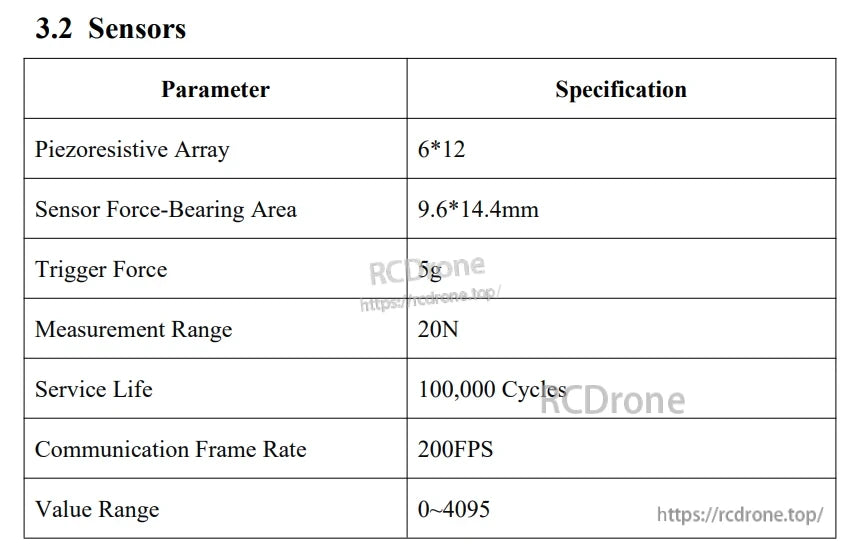
संवेदक विनिर्देश: 6x12 एरे, 9.6x14.4 मिमी क्षेत्र, 5g ट्रिगर, 20N रेंज, 100k चक्र, 200FPS, 0-4095 मान रेंज।
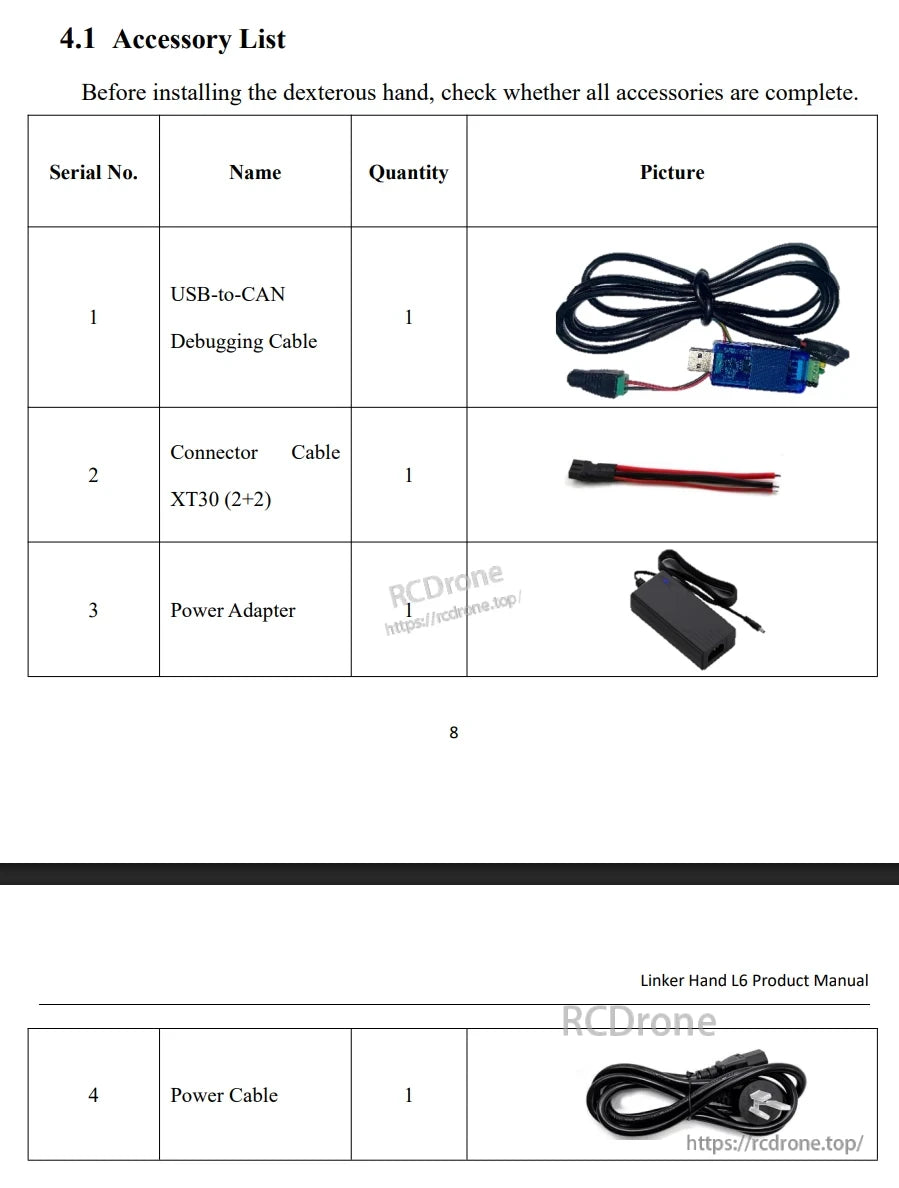
Linker Hand L6 के लिए सहायक सूची: USB-से-CAN केबल, XT30 कनेक्टर, पावर एडाप्टर, और पावर केबल। स्थापना से पहले पूर्णता की पुष्टि करें।
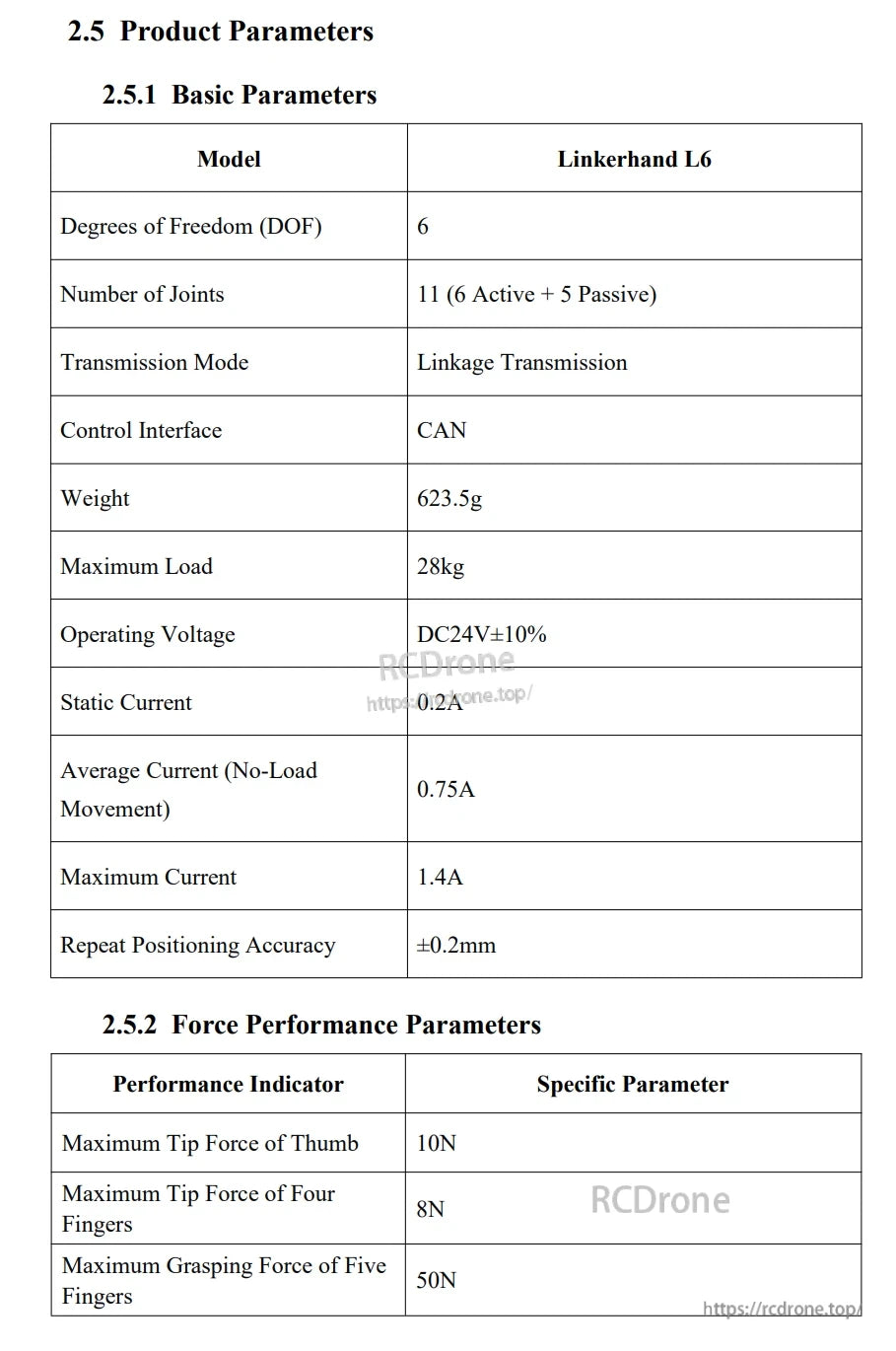
लिंकरहैंड L6 रोबोट हाथ में 6 DOF, 11 जोड़ों, CAN नियंत्रण, 623.5g वजन, 28kg अधिकतम लोड संभालने की क्षमता, DC24V±10% पर चलने की क्षमता, ±0.2mm सटीकता, और 50N तक की पकड़ने की ताकत है।







