







LINKERBOT लिंकर्स हैंड O6 रोबोटिक हैंड, 6 डिग्री फ्रीडम, 11 जॉइंट्स, CAN/RS485, 130N ग्रिप, ±0.2mm सटीकता, DC24V±10%
LINKERBOT लिंकर्स हैंड O6 रोबोटिक हैंड, 6 डिग्री फ्रीडम, 11 जॉइंट्स, CAN/RS485, 130N ग्रिप, ±0.2mm सटीकता, DC24V±10%
LINKERBOT
पिकअप उपलब्धता लोड नहीं की जा सकी
Overview
LINKERBOT Linker Hand O6 एक रोबोट हाथ है जिसे कॉम्पैक्ट इंटीग्रेशन और सटीक संचालन के लिए डिज़ाइन किया गया है। यह 6 DoF के साथ 11 जोड़ों (6 सक्रिय + 5 निष्क्रिय) के साथ, स्थिर क्रियान्वयन के लिए वर्म गियर ट्रांसमिशन, CAN/RS485 नियंत्रण, और वैकल्पिक स्पर्श संवेदन प्रदान करता है। कुशल संरचना DC24V±10% संचालन वोल्टेज पर ±0.2mm पुनरावृत्ति स्थिति सटीकता के साथ 130N तक पांच-उंगली पकड़ बल प्रदान करती है। हल्का 370g निर्माण और छोटा फुटप्रिंट लॉजिस्टिक्स हैंडलिंग, औद्योगिक असेंबली, और असामान्य आकार की पकड़ने के परिदृश्यों का समर्थन करता है।
मुख्य विशेषताएँ
कॉम्पैक्ट &और लचीला
कॉम्पैक्ट संरचनात्मक डिज़ाइन उपकरण के भार को कम करता है जबकि तंग स्थानों में सटीक पकड़ के लिए लचीलापन बढ़ाता है।
उच्च स्थायित्व
हल्के वजन की ताकत और पहनने के प्रतिरोध के लिए एल्यूमिनियम मिश्र धातु से निर्मित, दीर्घकालिक स्थिर प्रदर्शन का समर्थन करता है।
डिवाइस-क्लाउड एकीकरण
डिवाइस-क्लाउड एकीकरण एक क्लाउड-आधारित कौशल पुस्तकालय के माध्यम से त्वरित तैनाती को सक्षम बनाता है, जिसमें सरल संचालन और अनुकूलन शामिल है।
विशेषताएँ
| मॉडल | LINKERBOT लिंकर्स हैंड O6 |
| स्वतंत्रता के डिग्री (DoF) | 6 |
| जोड़ों की संख्या | 11 (6 सक्रिय + 5 निष्क्रिय) |
| संक्रमण मोड | वर्म गियर ट्रांसमिशन |
| नियंत्रण इंटरफेस | CAN/RS485 |
| वजन | 370g |
| अधिकतम लोड | 30kg |
| ऑपरेटिंग वोल्टेज | DC24V±10% |
| दोहराने की स्थिति सटीकता | ±0.2mm |
| स्पर्श संवेदक | वैकल्पिक |
| अधिकतम अंगूठे की टिप बल | 28N |
| चार अंगुलियों की टिप का अधिकतम बल | 33N |
| पांच अंगुलियों का अधिकतम पकड़ बल | 130N |
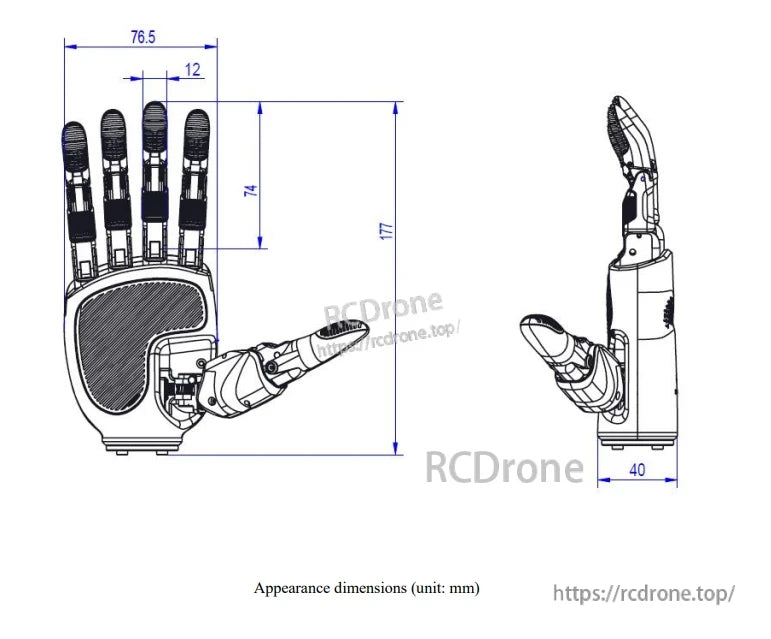
| आयाम (दृश्यता) | ऊँचाई 177mm; चौड़ाई 76.5 मिमी; मोटाई 40 मिमी |
गतिशीलता की सीमा
| LF2, RF2, MF2, FF2 (झुकाव) | 90° |
| LF1, RF1, MF1, FF1 (झुकाव) | 80° |
| THUMB1 (झुकाव) | 55° |
| THUMB2 (झुकाव) | 30° |
| THUMB3 (साइड - झुकाव) | 88° |
क्या शामिल है
- USB-से-CAN डिबगिंग केबल ×1
- कनेक्टर केबल XT30 (2+2) ×1
- पावर एडाप्टर ×1
- पावर केबल ×1
- लिंकर हैंड O6 x1
बिक्री या तकनीकी सहायता के लिए, संपर्क करें [email protected] or देखें https://rcdrone.top/.
अनुप्रयोग
- लॉजिस्टिक्स हैंडलिंग और सामग्री स्थानांतरण
- औद्योगिक असेंबली और उपकरण संचालन
- असामान्य आकारों और उपभोक्ता वस्तुओं का स्थिर पकड़
हस्तनिर्देश
Linker_Hand_O6_Product_Manual.pdf
विवरण

Linker Hand O6 सटीक, मजबूत पकड़ के लिए 6 सक्रिय और 5 निष्क्रिय जोड़ों की पेशकश करता है। कॉम्पैक्ट, टिकाऊ एल्यूमीनियम डिज़ाइन लॉजिस्टिक्स, असेंबली और असामान्य पकड़ के लिए उपयुक्त है। कोडिंग के बिना आसान एआई प्रशिक्षण के लिए क्लाउड एकीकरण की विशेषताएँ हैं।


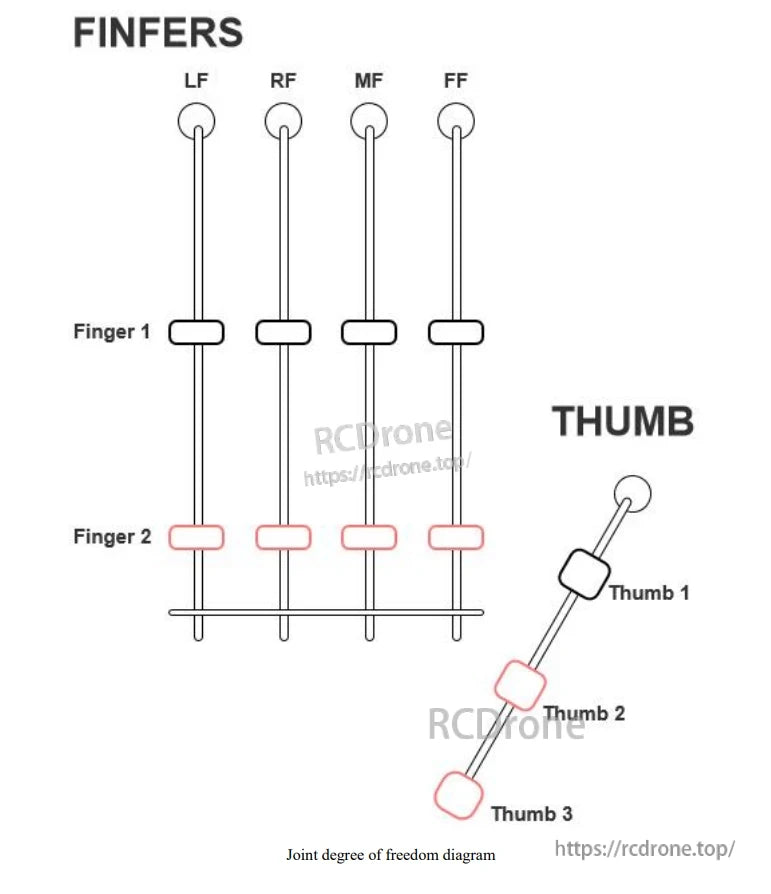
उंगलियों और अंगूठे के जोड़ की स्वतंत्रता के डिग्री का आरेख
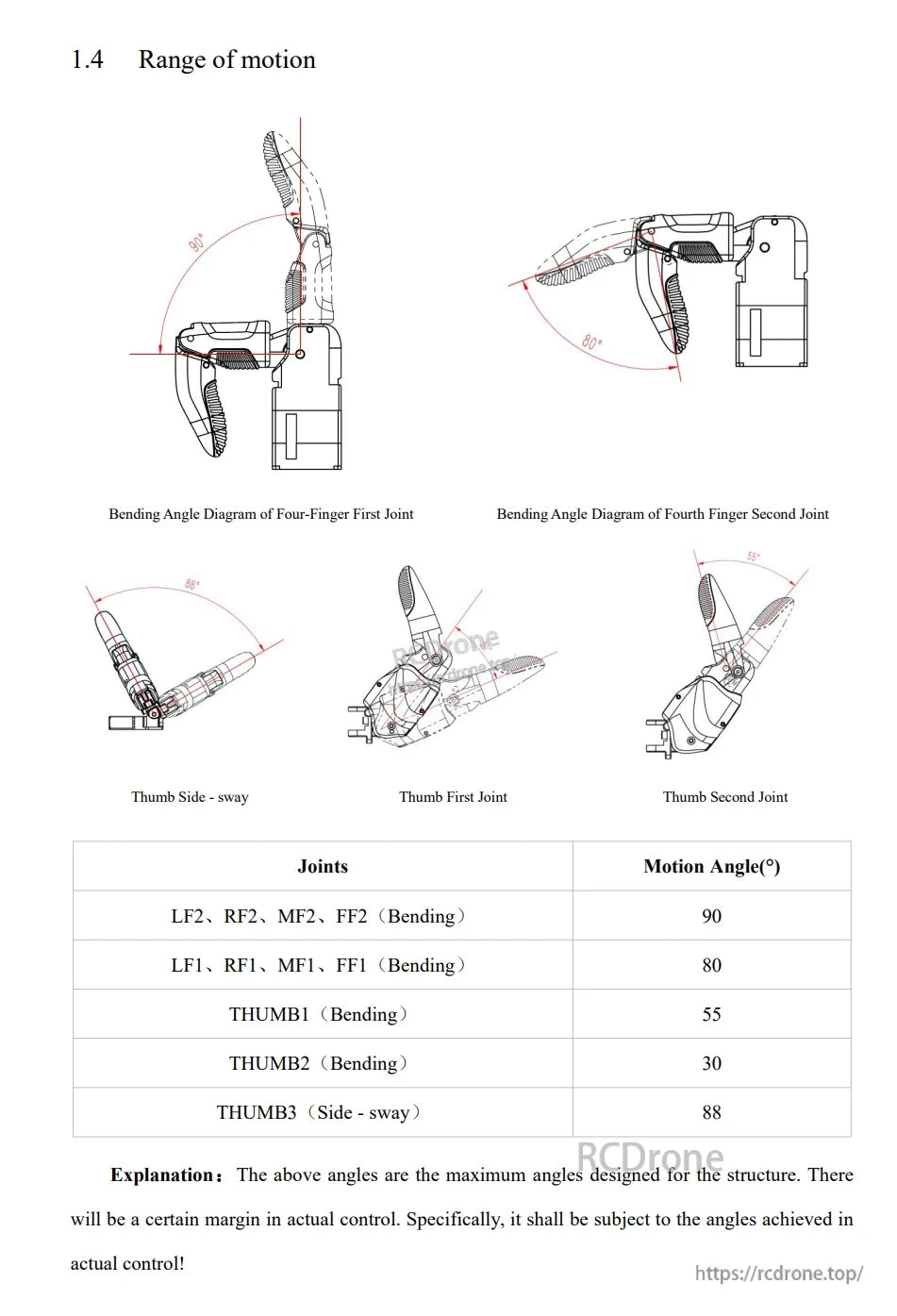
उंगलियाँ 80–90° तक मुड़ती हैं, अंगूठा 30–55° तक मुड़ता है, और साइड-स्वे 88° तक पहुँचता है। ये अधिकतम कोण हैं; वास्तविक नियंत्रण में थोड़ी भिन्नता हो सकती है।
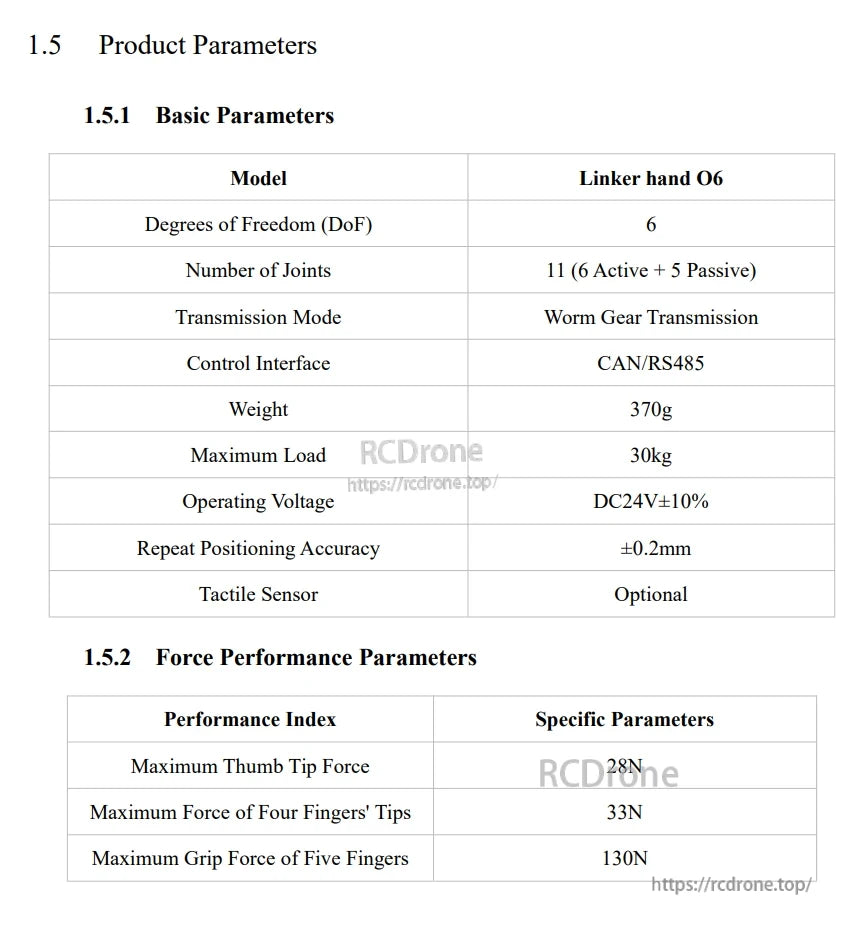
लिंकर हैंड O6 रोबोट हाथ में 6 डिग्री ऑफ फ्रीडम (DoF), 11 जोड़ों, वर्म गियर ट्रांसमिशन, CAN/RS485 नियंत्रण, 370 ग्राम वजन, 30 किलोग्राम अधिकतम लोड संभालने की क्षमता, DC24V±10% पर संचालन, ±0.2 मिमी सटीकता है, और निर्दिष्ट बल प्रदर्शन के साथ वैकल्पिक स्पर्श संवेदक प्रदान करता है।

कुशल हाथ स्थापना के लिए सहायक उपकरण सूची: USB-से-CAN केबल, XT30 कनेक्टर, पावर एडाप्टर, और पावर केबल—सभी की मात्रा एक।







