



LKMTECH MF4005-V2 मोटर 12V RS485/CAN 18-बिट मैग्नेटिक एन्कोडर DF40V2 ड्राइव विकल्प रोबोटिक्स के लिए
LKMTECH MF4005-V2 मोटर 12V RS485/CAN 18-बिट मैग्नेटिक एन्कोडर DF40V2 ड्राइव विकल्प रोबोटिक्स के लिए
LKMTECH
पिकअप उपलब्धता लोड नहीं की जा सकी
अवलोकन
LKMTECH MF4005-V2 एक मोटर है जिसे एकीकृत मेकाट्रोनिक अनुप्रयोगों के लिए डिज़ाइन किया गया है जिसमें हल्का डिज़ाइन, उच्च नियंत्रण सटीकता और उच्च टॉर्क आउटपुट की आवश्यकता होती है। MF4005 V2 अपडेट में शामिल हैं: एन्कोडर रिज़ॉल्यूशन को 14-बिट से 18-बिट में अपग्रेड किया गया, कॉगिंग टॉर्क ऑप्टिमाइजेशन, PWM इनपुट समर्थन, और कई बौड-रेट विकल्पों के साथ CAN/RS485 संचार।
मुख्य विशेषताएँ
- एकीकृत डिज़ाइन: यांत्रिक-इलेक्ट्रिकल एकीकरण
- हल्का डिज़ाइन: एयरोस्पेस एल्युमिनियम मिश्र धातुओं का समतल डिज़ाइन
- उच्च नियंत्रण सटीकता: मैग्नेटिक एन्कोडर (MF4005 V2 अपडेट 14-बिट से 18-बिट में अपग्रेड करता है)
- उच्च टॉर्क आउटपुट: उच्च प्रदर्शन RbFeB स्थायी चुम्बक
- PWM इनपुट का समर्थन करता है
- संचार: CAN या RS485
- ड्राइव फ़ंक्शन: टॉर्क मोड, स्पीड मोड और पोजीशन मोड के बीच स्विच कर सकता है
- मुख्य नियंत्रण: 32-बिट Cortex-M4 ARM उच्च-प्रदर्शन प्रोसेसर (ड्राइव)
- स्टेटर तापमान की वास्तविक समय निगरानी (ड्राइव)
- ड्राइव पावर स्टेज: कम आंतरिक प्रतिरोध और उच्च करंट के साथ पूर्ण ब्रिज सर्किट
- 18-बिट सिंगल टर्न एब्सोल्यूट वैल्यू मैग्नेटिक एन्कोडर (ड्राइव फ़ीचर टेक्स्ट); एक कैलिब्रेशन, शून्य स्थिति कभी नहीं खोती
- मोटर निर्माण नोट्स: बाहरी-रोटर; स्थायी चुम्बक बहु-चरण आर्क डिज़ाइन; छोटा वायु अंतर; रेडियल चुम्बकीकरण; 0.2 मिमी सिलिकॉन स्टील शीट; क्लास एच इंसुलेटेड एनामेल्ड वायर; SH ग्रेड NdFeB
- OEM/ODM सेवा (उत्पाद विनिर्देशन नहीं)
- पैरामीटर सॉफ़्टवेयर: पैरामीटर समायोजित करने, परीक्षण करने और अपग्रेड करने के लिए प्रदान किया गया प्रोग्राम सॉफ़्टवेयर; PC, MCU, PLC, ICP और RPi जैसे ओपन-सोर्स विकास का समर्थन करता है
अनुप्रयोग परिदृश्य
- मानवाकार रोबोट
- रोबोटिक आर्म्स
- एक्सोस्केलेटन
- चतुर्भुज रोबोट
- AGV वाहन
- ARU रोबोट
- कैमरा PTZ
- लेजर लिडार
- पावर स्टेशन निरीक्षण रोबोट
- औद्योगिक निरीक्षण
विशेषताएँ
मोटर मॉडल: MF4005-V2
| पैरामीटर | मान (25 मोड़) | मान (40 मोड़) |
|---|---|---|
| आइटम नाम | MF4005-V2 | MF4005-V2 |
| मोड़ | 25 | 40 |
| रेटेड वोल्टेज | 12V | 12V |
| अधिकतम गति | 2390RPM | 1300RPM |
| रेटेड टॉर्क | 0.07 N.m | 0.06 N.m |
| रेटेड स्पीड | 1600RPM | 700RPM |
| रेटेड करंट | 1.44A | 0.81A |
| मैक्स पावर | 14W | 4.6W |
| मैक्स टॉर्क | 0.25 N.m | 0.12 N.m |
| स्पीड कॉन्स्टेंट | 133 rpm/V | 58 rpm/V |
| टॉर्क कॉन्स्टेंट | 0.05 N.m/A | 0.07 N.m/A |
| वाइंडिंग टाइप | Y | Y |
| फेज रेजिस्टेंस | 1.9Ω | 4.3Ω |
| फेज इंडक्टेंस | 0.5mH | 1.2mH |
| मोटर पोल | 26 | 26 |
| रोटर जड़ता | 56 gcm² | 56 gcm² |
| मोटर तापमान | हाँ | हाँ |
| बियरिंग रेटेड लोड | 140N | 140N |
| मोटर वजन | 65g | 65g |
| सिफारिशित ड्राइव | DF40V2 | DF40V2 |
| ड्राइव इनपुट वोल्टेज | 7.4-32V | 7.4-32V |
| संचार | RS485 या CAN | RS485 या CAN |
| संचार आवृत्ति | RS485: 500Hz (115200bps) / CAN: 2KHz (1Mbps) | RS485: 500Hz (115200bps) / CAN: 2KHz (1Mbps) |
| एनकोडर | 18बिट मैग्नेटिक एनकोडर | 18बिट मैग्नेटिक एनकोडर |
| एनकोडर बौडरेट (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| बौडरेट (CAN) | 100K, 125K, 250K, 500K, 1M | 100K, 125K, 250K, 500K, 1M |
| नियंत्रण मोड | टॉर्क लूप (24KHz) / स्पीड लूप (8KHz) / पोजीशन लूप (8KHz) | टॉर्क लूप (24KHz) / स्पीड लूप (8KHz) / पोजीशन लूप (8KHz) |
| त्वरण वक्र | ट्रैपेज़ॉइडल त्वरण | ट्रैपेज़ॉइड त्वरण |
इंटरफेस परिभाषा
आईडी स्विच: आईडी स्विच
| इंटरफेस | नोट |
|---|---|
| ए/एल | आरएस485-ए या सीएएन-एल |
| बी/एच | आरएस485-बी या सीएएन-एच |
| वी+ | सकारात्मक पावर सप्लाई |
| वी+ | सकारात्मक पावर सप्लाई |
| वी- | नकारात्मक पावर सप्लाई |
| वी- | नकारात्मक पावर सप्लाई |
| टी | यूएआरटी ट्रांसमीटर |
| आर | यूएआरटी रिसीवर |
| जी | सिग्नल जीएनडी |
पूर्व-बिक्री या एकीकरण समर्थन (आरएस485/सीएएन सेटअप, बौड दर चयन, और सीएडी फ़ाइलें) के लिए, संपर्क करें [email protected] or यात्रा करें https://rcdrone.top/.
हस्तनिर्मित / फ़ाइलें
विवरण

MF4005‑V2 मोटर, एन्कोडर, और ड्राइव सुविधाओं को कॉम्पैक्ट रोबोटिक्स निर्माण के लिए एकीकृत करता है, जिसमें उन्नत 18-बिट मैग्नेटिक एन्कोडर और CAN/RS485 संचार विकल्प शामिल हैं।
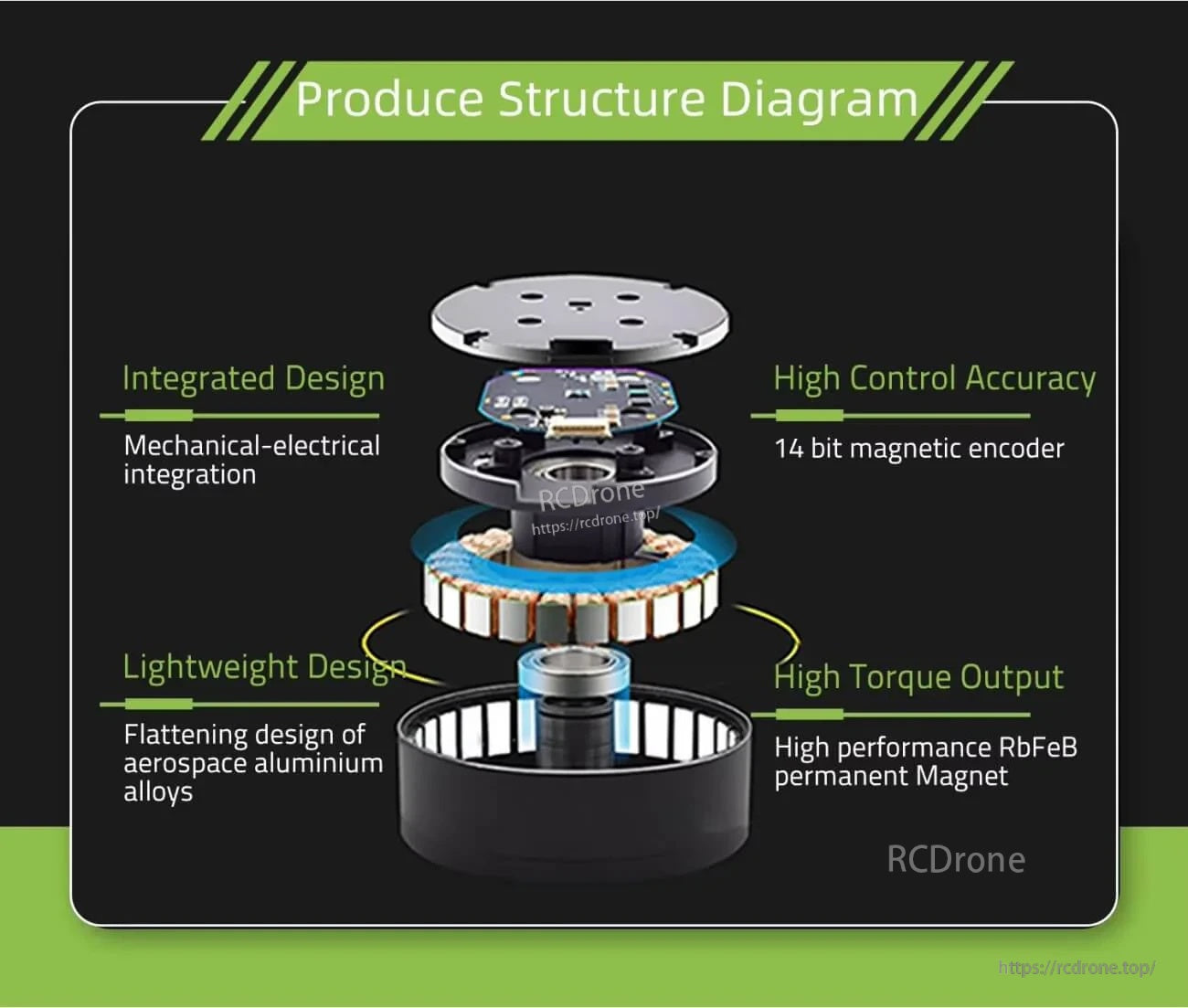
एकीकृत, हल्की संरचना ड्राइव इलेक्ट्रॉनिक्स को मोटर असेंबली के साथ जोड़ती है ताकि सटीक नियंत्रण और उच्च टॉर्क आउटपुट का समर्थन किया जा सके।
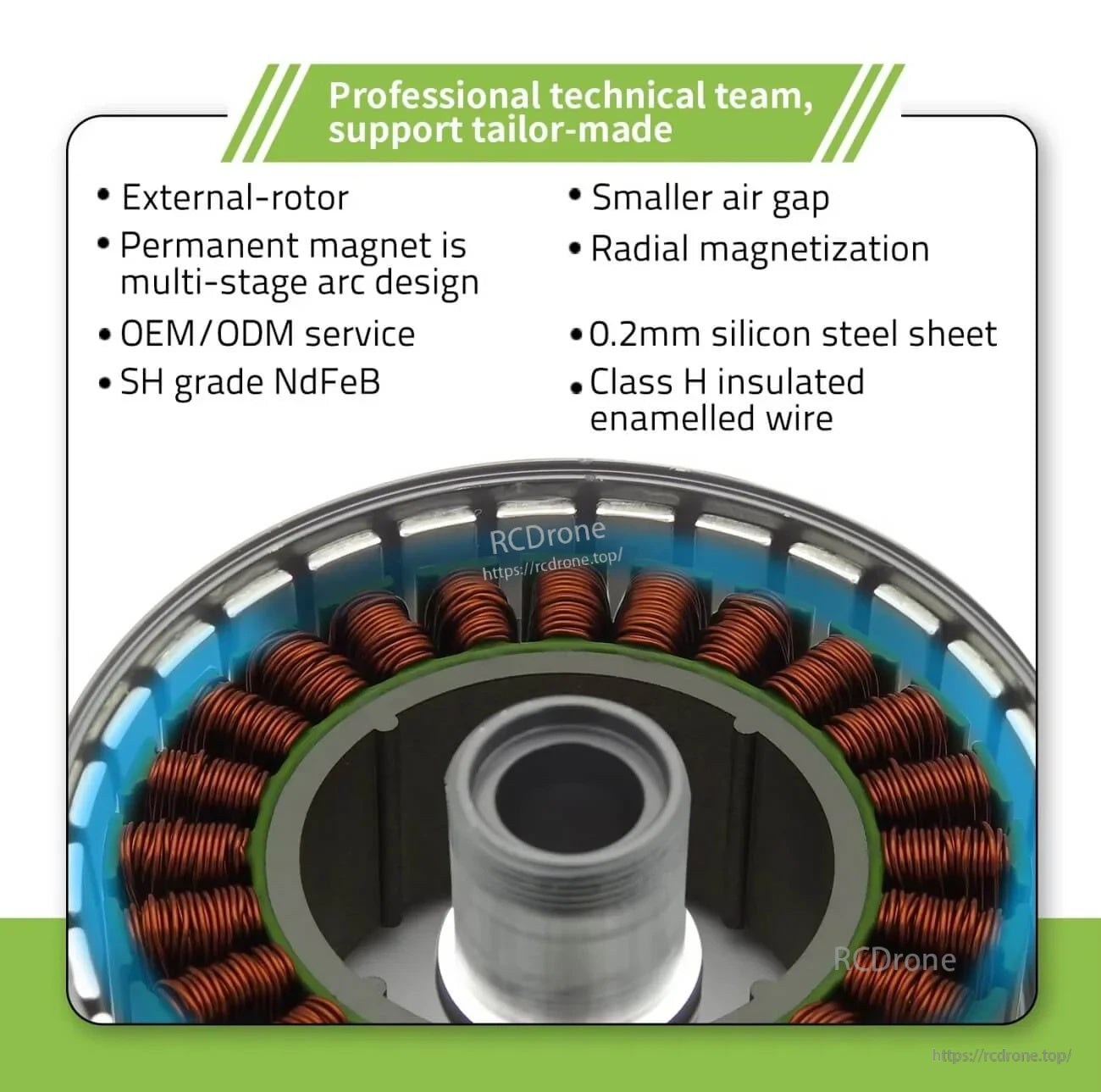
बाहरी-रोटर डिज़ाइन और घनी वाइंडिंग लेआउट आकार, प्रतिक्रिया, और टॉर्क को संतुलित करने में मदद करते हैं जो रोबोटिक जोड़ों और एक्ट्यूएटर्स के लिए उपयुक्त हैं।
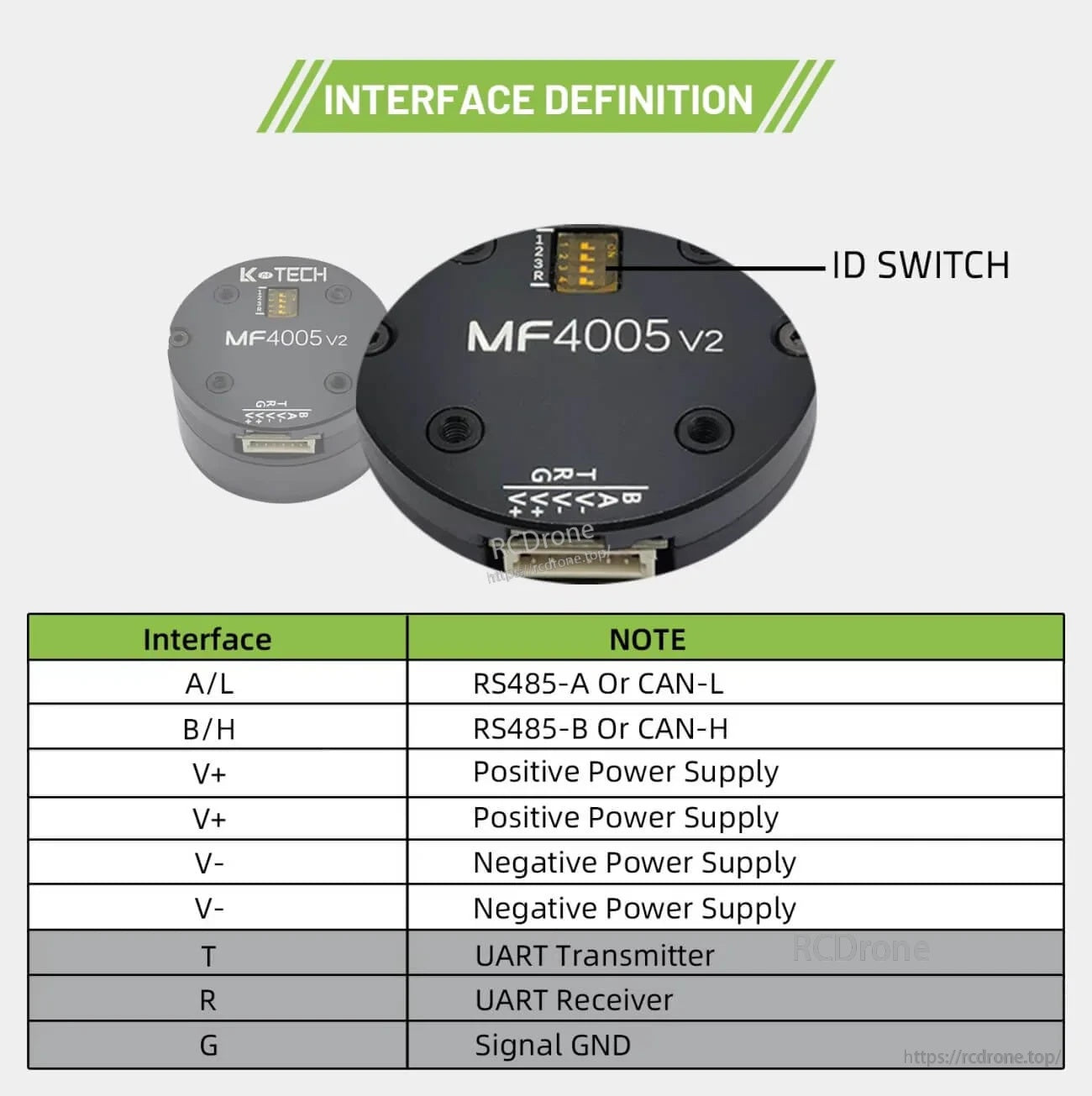
वायरिंग को RS485 या CAN का उपयोग करके बस सेटअप के लिए स्पष्ट रूप से लेबल किए गए कनेक्टर और ID स्विच के साथ सरल बनाया गया है।
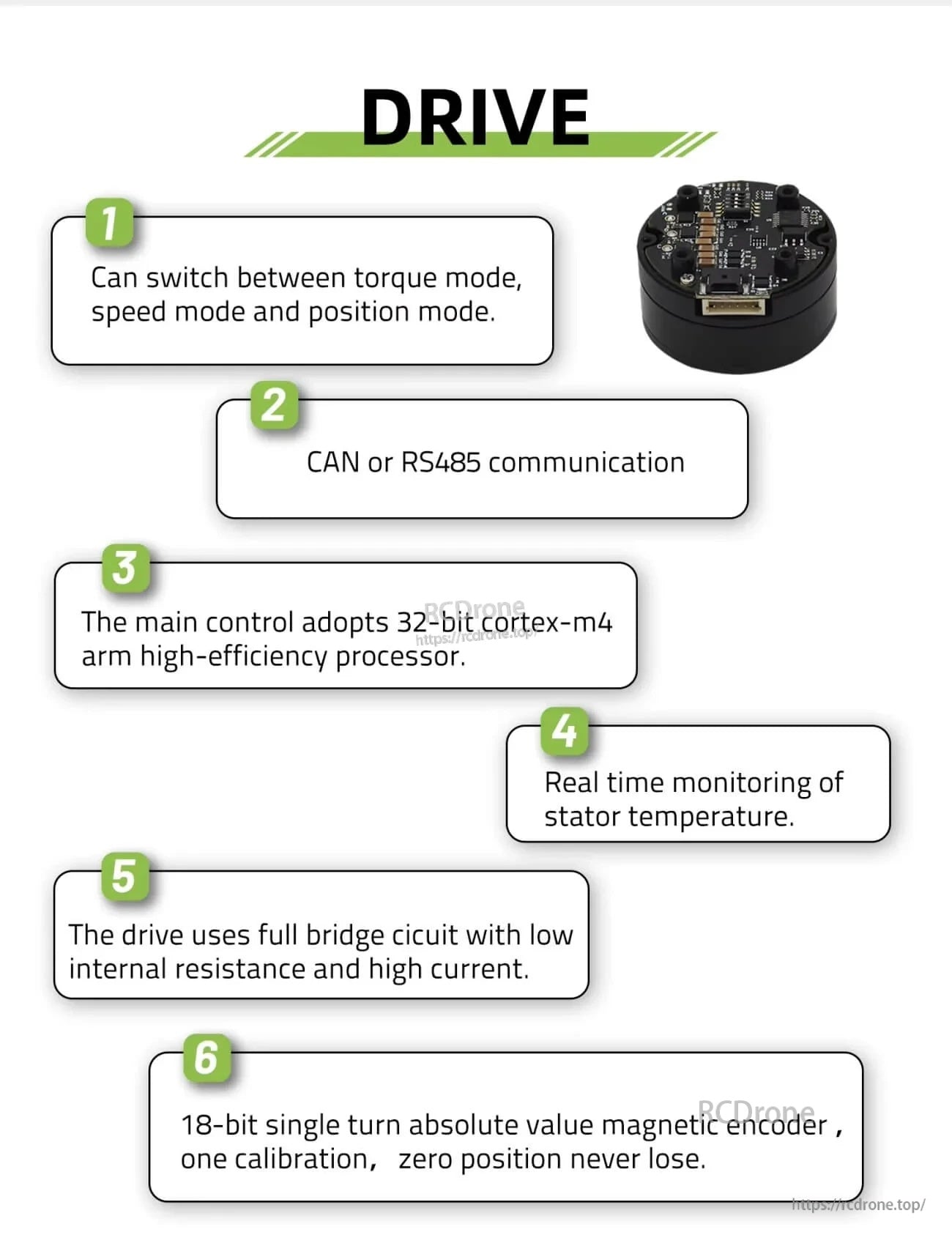
ड्राइव क्षमताओं में चयन योग्य टॉर्क, गति, और स्थिति मोड शामिल हैं, साथ ही CAN या RS485 के माध्यम से वास्तविक समय में स्टेटर तापमान की निगरानी।
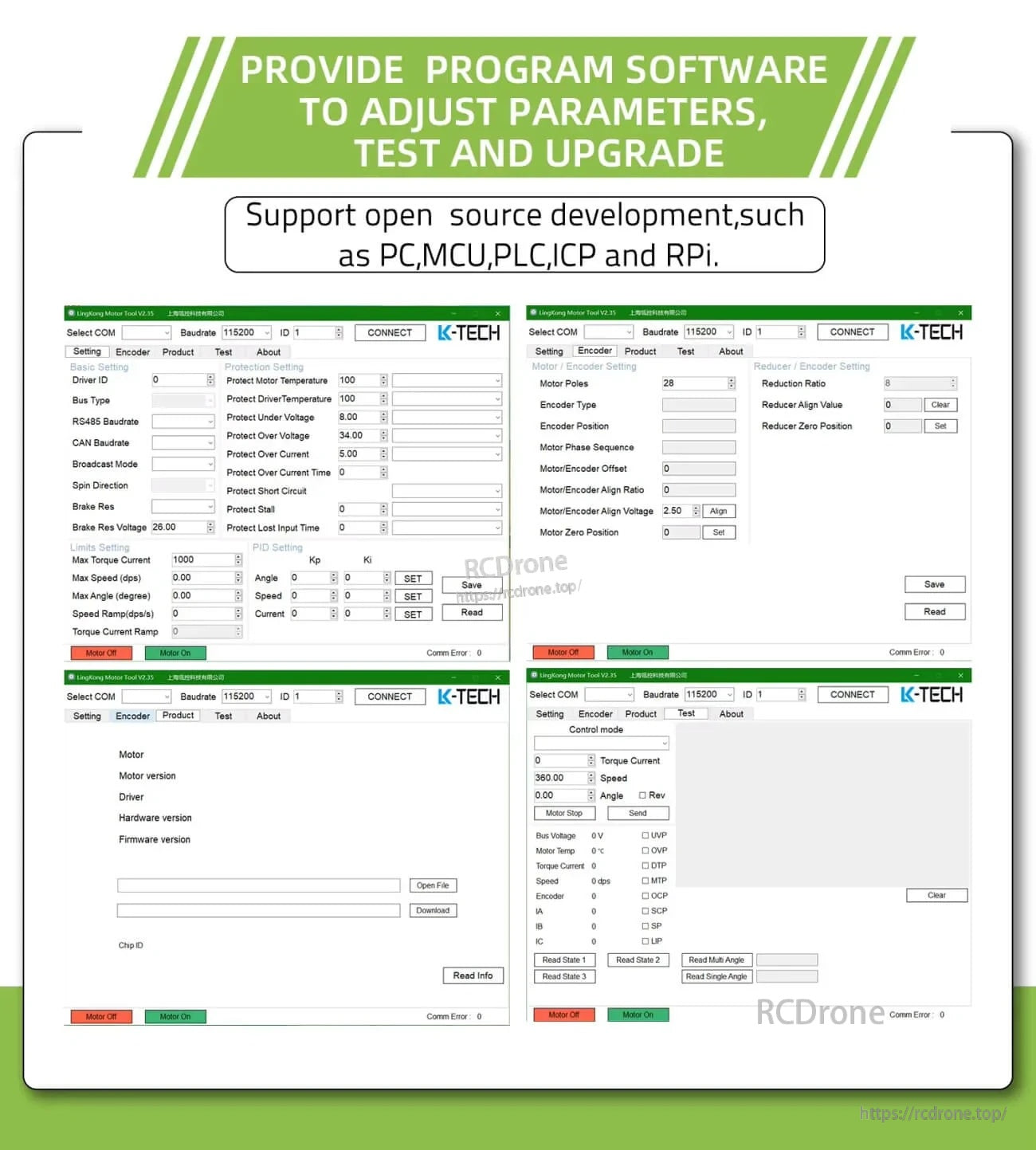
पीसी सॉफ़्टवेयर समर्थन पैरामीटर ट्यूनिंग, परीक्षण और अपग्रेड में मदद करता है, विकास कार्यप्रवाह के लिए उपयुक्त विकल्पों के साथ।
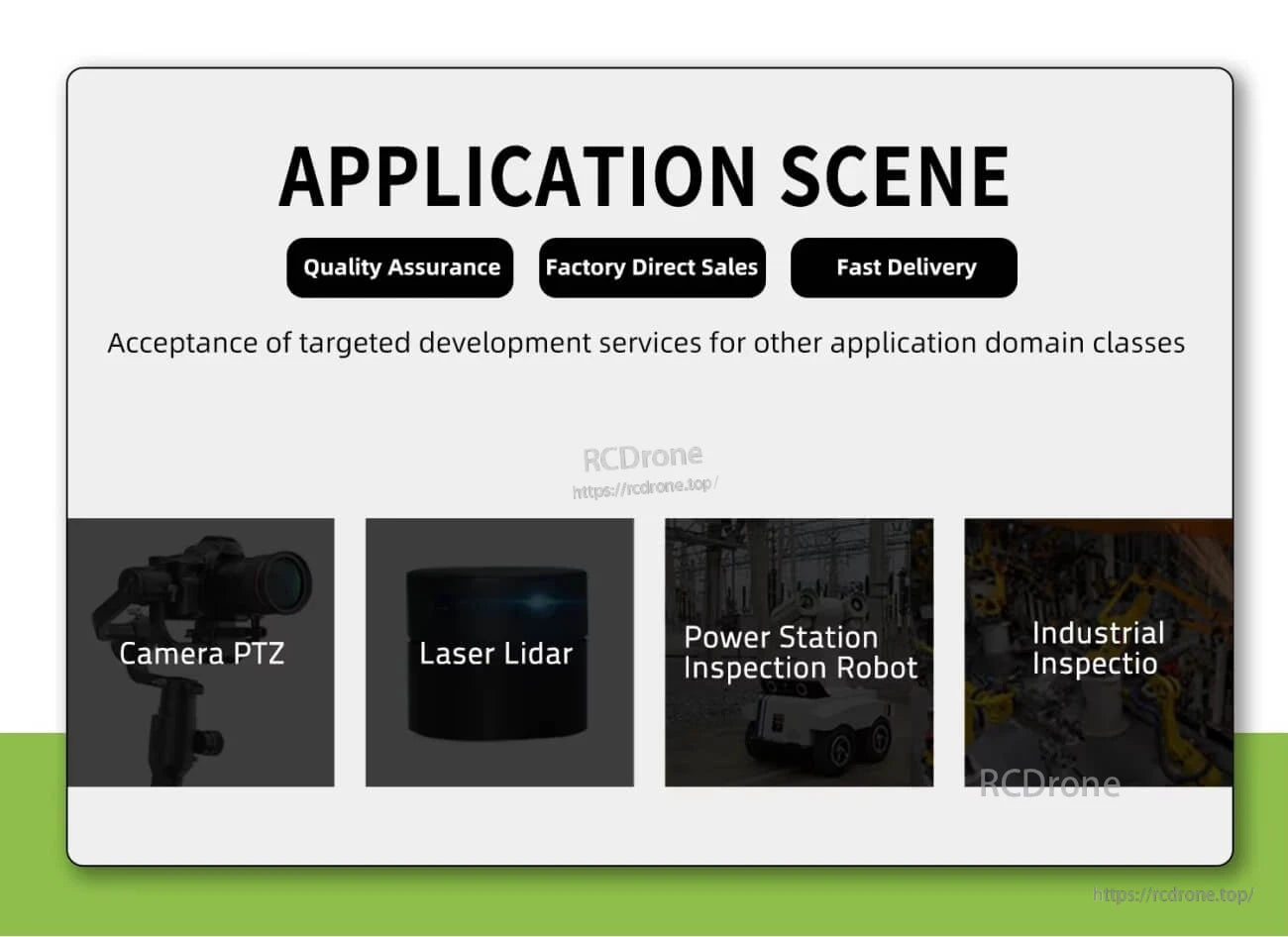
सामान्य अनुप्रयोग क्षेत्रों में पीटीजेड कैमरा हेड, लिडार सिस्टम और औद्योगिक वातावरण में उपयोग किए जाने वाले निरीक्षण रोबोट शामिल हैं।
Related Collections



