




LKMTECH MG4010E-i36-V3 प्लैनेटरी गियर मोटर 24V 1:36 RS485/CAN मैग्नेटिक एन्कोडर रोबोटिक्स के लिए
LKMTECH MG4010E-i36-V3 प्लैनेटरी गियर मोटर 24V 1:36 RS485/CAN मैग्नेटिक एन्कोडर रोबोटिक्स के लिए
LKMTECH
पिकअप उपलब्धता लोड नहीं की जा सकी
Overview
एलकेएमटेक MG4010E-i36-V3 मोटर एक प्लैनेटरी गियर मोटर है जिसे रोबोटिक्स और मोशन-कंट्रोल एक्ट्यूएटर्स के लिए डिज़ाइन किया गया है। इसमें एक ब्रशलेस मोटर, प्लैनेटरी रिड्यूसर, और मैग्नेटिक एन्कोडर शामिल हैं, जिसमें संचार विकल्प RS485 या CAN के रूप में सूचीबद्ध हैं।
मुख्य विशेषताएँ
- प्लैनेटरी गियर मोटर (MG4010E-i36, V3)।
- गियर अनुपात: 1:36 (जिसे "गियर अनुपात 1:36" के रूप में भी दिखाया गया है)।
- गियर बैकलैश: 7 आर्कमिन (छवि लेबल) / 12 आर्कमिन (विशेषता तालिका)।
- एन्कोडर: 18बिट सिंगल टर्न एब्सोल्यूट मैग्नेटिक एन्कोडर (छवि पाठ); इसे 18बिट (मोटर) + 14बिट (रिड्यूसर) मैग्नेटिक एन्कोडर (विशेषता तालिका) के रूप में भी सूचीबद्ध किया गया है।
- संचार: RS485 या CAN।
- ड्राइव/FOC ड्राइवर संदर्भित (छवि पाठ: “उच्च प्रदर्शन FOC ड्राइवर”)।
- बिल्ट-इन ब्रेक (छवि पाठ/UI लेबल)।
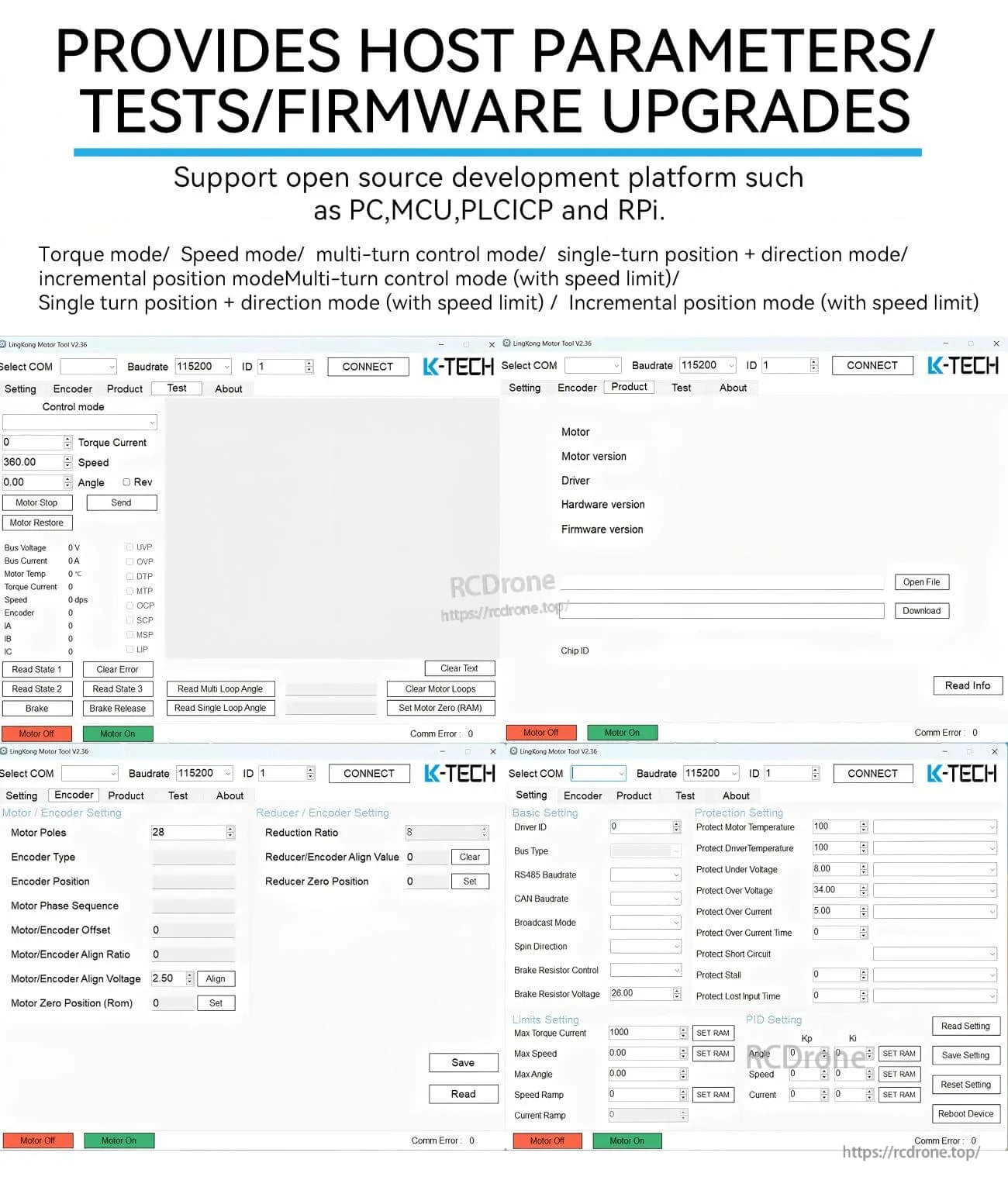
- होस्ट पैरामीटर/परीक्षण/फर्मवेयर अपग्रेड का समर्थन किया गया (छवि पाठ)।
विशेषताएँ
| आइटम का नाम | MG4010E-i36-V3 |
| रेटेड वोल्टेज | 24V |
| अधिकतम गति | 90RPM |
| रेटेड स्पीड | 77RPM |
| रेटेड करंट | 2.4A |
| अधिकतम पावर | 132W |
| रेटेड टॉर्क | 6 N.m (विशेषता तालिका) / 9 N.m (छवि लेबल) |
| अधिकतम टॉर्क | 13 N.m (विशेषता तालिका) / 18 N.m (छवि लेबल) |
| गति स्थिरता | 3 rpm/V |
| टॉर्क स्थिरता | 2.58 N.m/A |
| टर्न | 14 |
| वाइंडिंग प्रकार | Y |
| फेज प्रतिरोध | 0.68 Ω |
| चरण प्रेरण | 0.25 mH |
| मोटर पोल | 28 |
| रोटर जड़ता | 158 gcm² |
| मोटर तापमान | हाँ |
| रिड्यूसर प्रकार | PG5336 |
| रिडक्शन अनुपात | 1:36 |
| बैकलैश | ≤12 आर्कमिन (विशेष तालिका) / 6 आर्कमिन (छवि लेबल) |
| बियरिंग रेटेड लोड | 1120 N |
| मोटर वजन | 378 g |
| सिफारिशित ड्राइव | DG40E |
| ड्राइव इनपुट वोल्टेज | 12-24V (विशेष तालिका) / 12-60V (छवि लेबल) |
| संचार | RS485 या CAN |
| संचार आवृत्ति | RS485: 500 Hz (115200 bps) / CAN: 2 KHz (1 Mbps) |
| एन्कोडर | 18बिट (मोटर) + 14बिट (रिड्यूसर) मैग्नेटिक एन्कोडर |
| एन्कोडर बौडरेट (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2 Mbps |
| बौडरेट (CAN) | 100K, 125K, 250K, 500K, 1M |
| नियंत्रण मोड | टॉर्क लूप (24 KHz) / स्पीड लूप (8 KHz) / पोजीशन लूप (4 KHz) |
| त्वरण वक्र | ट्रैपेज़ॉइडल त्वरण |
| मोटर का आकार | Φ 53*54.5 (छवि लेबल) |
इंटरफेस परिभाषा
- ID स्विच (छवि लेबल: “ID स्विच”)।
| पोर्ट | निर्देश |
|---|---|
| A/H | RS485-A या CAN-H |
| B/L | RS485-B या CAN-L |
| V- | नकारात्मक पावर सप्लाई |
| V+ | सकारात्मक पावर सप्लाई |
| T | UART ट्रांसमीटर |
| R | UART रिसीवर |
| G | सिग्नल GND |
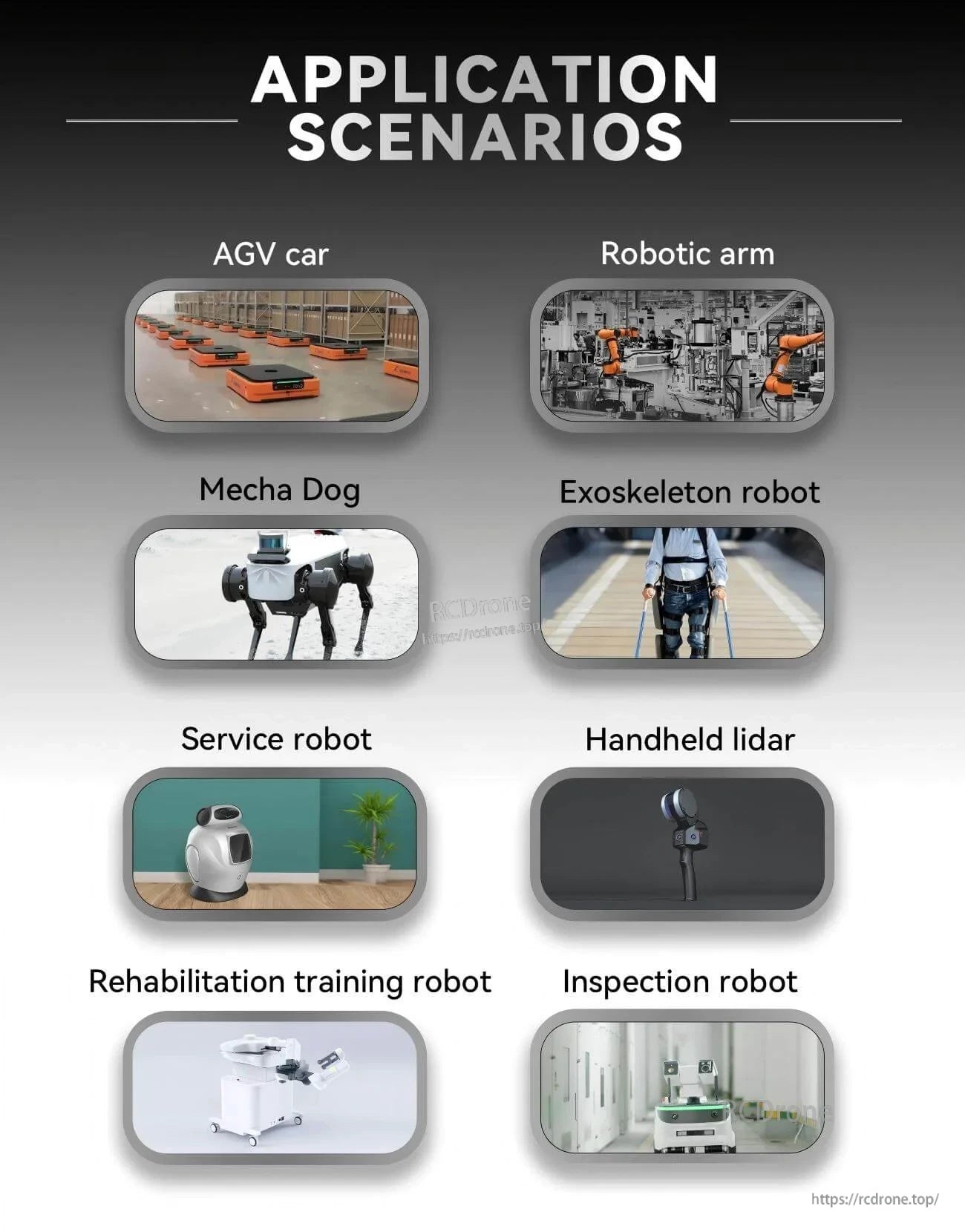
अनुप्रयोग परिदृश्य
- मानवाकार रोबोट
- रोबोटिक आर्म
- एक्सोस्केलेटन
- चतुर्भुज रोबोट
- AGV वाहन / AGV कार
- ARU रोबोट
- मेक डॉग
- सेवा रोबोट
- हैंडहेल्ड लिडार
- पुनर्वास प्रशिक्षण रोबोट
- निरीक्षण रोबोट
नियंत्रण & सॉफ़्टवेयर नोट्स
- पीसी, एमसीयू, पीएलसी, आईसीपी, और आरपीआई जैसे ओपन-सोर्स विकास प्लेटफार्मों का समर्थन करता है।
- सूचीबद्ध मोड (छवि पाठ): टॉर्क मोड, स्पीड मोड, मल्टी-टर्न नियंत्रण मोड, सिंगल-टर्न स्थिति + दिशा मोड, इंक्रीमेंटल स्थिति मोड; स्पीड लिमिट वाले संस्करण भी दिखाए गए हैं।
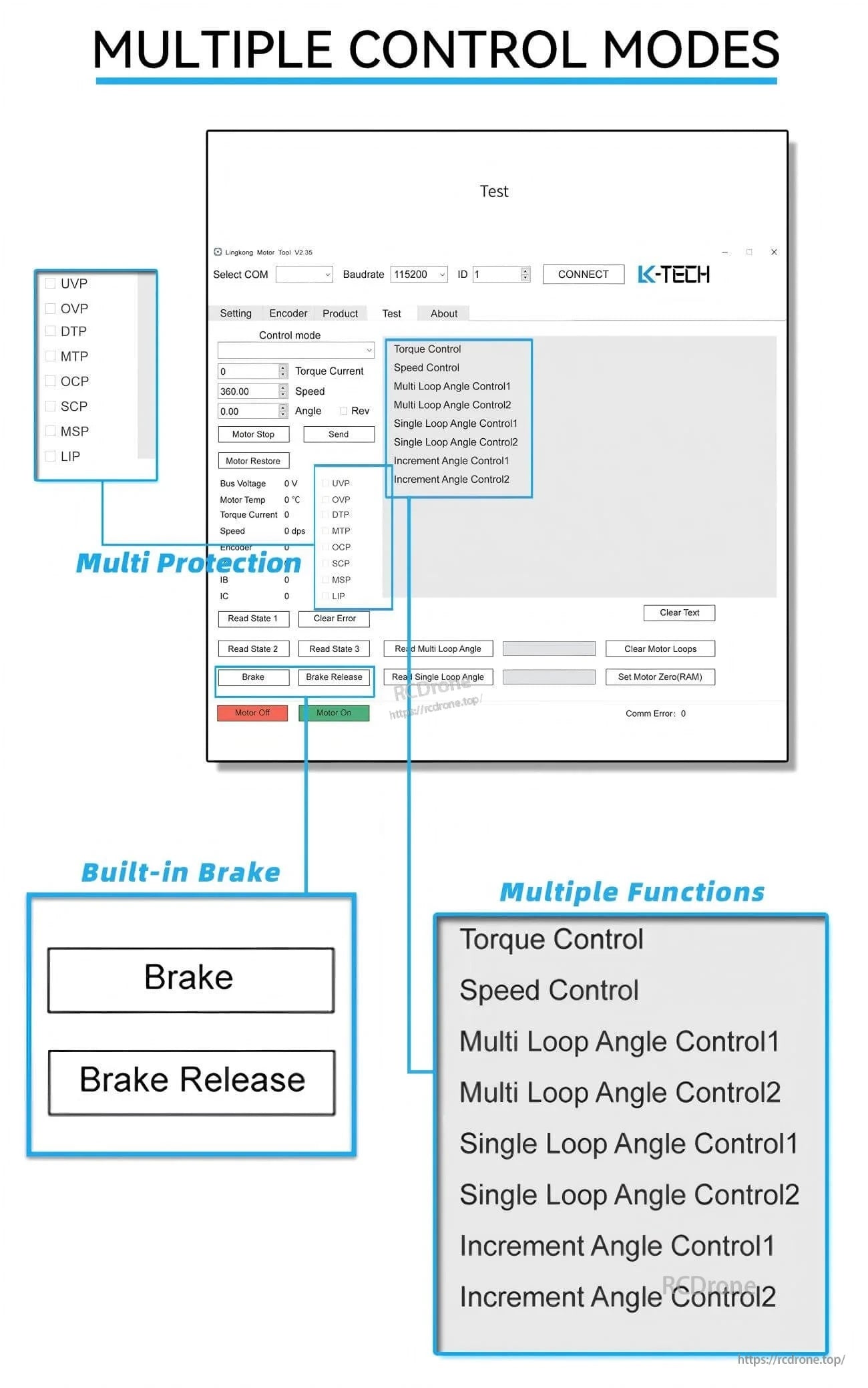
- यूआई में दिखाए गए कई नियंत्रण मोड: टॉर्क नियंत्रण, स्पीड नियंत्रण, मल्टी लूप एंगल नियंत्रण1, मल्टी लूप एंगल नियंत्रण2, सिंगल लूप एंगल नियंत्रण1, सिंगल लूप एंगल नियंत्रण2, इंक्रीमेंट एंगल नियंत्रण1, इंक्रीमेंट एंगल नियंत्रण2।
- दिखाए गए मल्टी प्रोटेक्शन लेबल: यूवीपी, ओवीपी, डीटीपी, एमटीपी, ओसीपी, एससीपी, एमएसपी, एलआईपी।
- दिखाए गए अंतर्निर्मित ब्रेक नियंत्रण: ब्रेक, ब्रेक रिलीज।
पूर्व-सेल संगतता जांच (आरएस485/सीएएन एकीकरण, बौड दर चयन) या फ़ाइल पहुंच सहायता के लिए, संपर्क करें [email protected] or यात्रा करें https://rcdrone.top/.
हस्तनिर्मित / दस्तावेज
विवरण

MG4010E-i36-V3 एक ब्रशलेस मोटर, ग्रह गियर और मैग्नेटिक एनकोडर को कॉम्पैक्ट रोबोटिक एक्ट्यूएटर्स के लिए जोड़ता है।
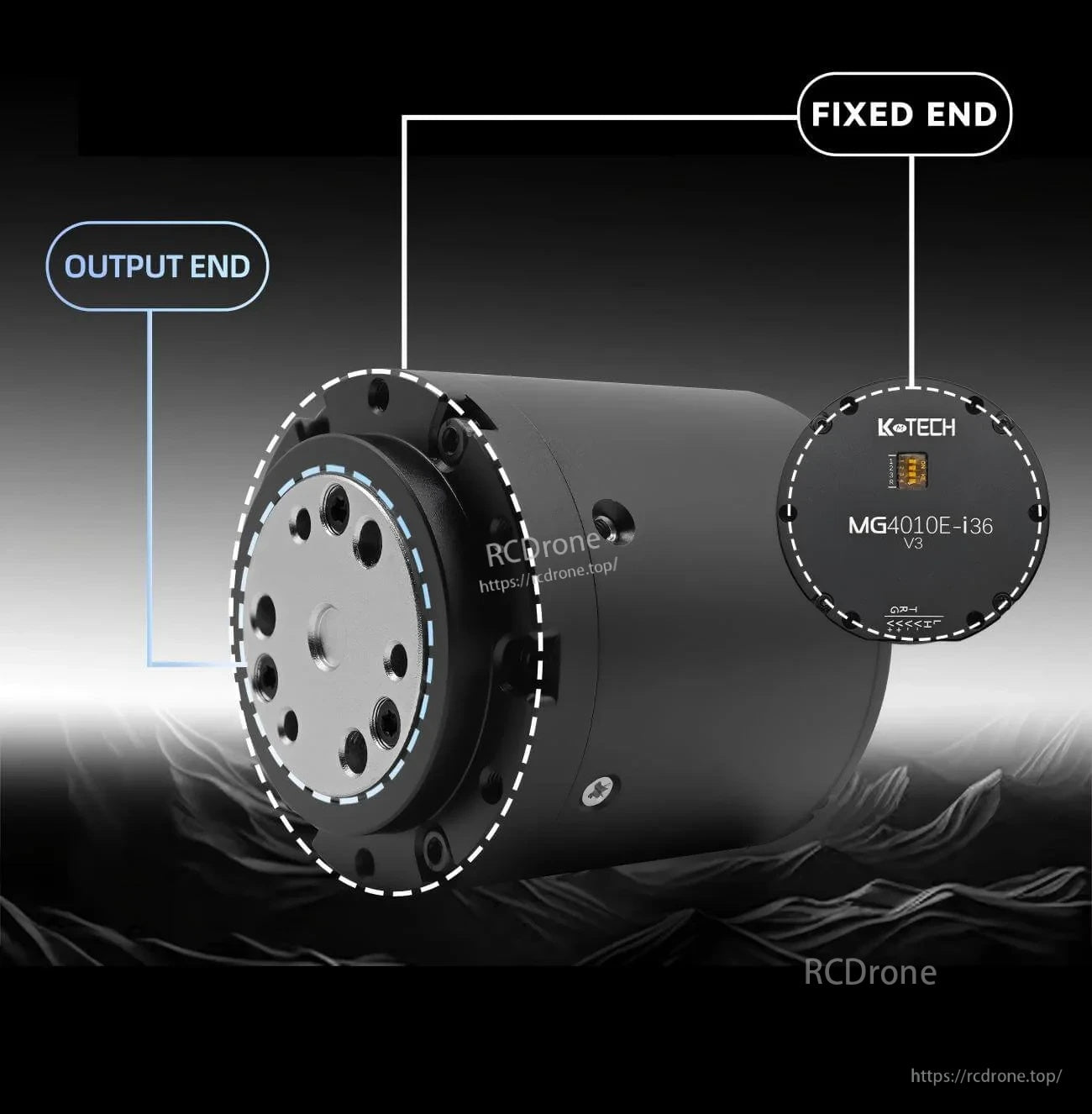
एक फ्लैन्ज-शैली का आउटपुट अंत और फिक्स्ड एंड लेआउट बाहों, पैरों और अन्य जॉइंट मॉड्यूल में एकीकरण को आसान बनाता है।

RS485 या CAN संचार एक FOC ड्राइवर और एब्सोल्यूट मैग्नेटिक एनकोडर फीडबैक के साथ स्थिर टॉर्क, गति और स्थिति नियंत्रण के लिए जोड़ा जाता है।
सामान्य उपयोग के मामले में AGVs, रोबोटिक आर्म्स, चौपायों के प्लेटफार्म, एक्सोस्केलेटन और निरीक्षण या सेवा रोबोट शामिल हैं।
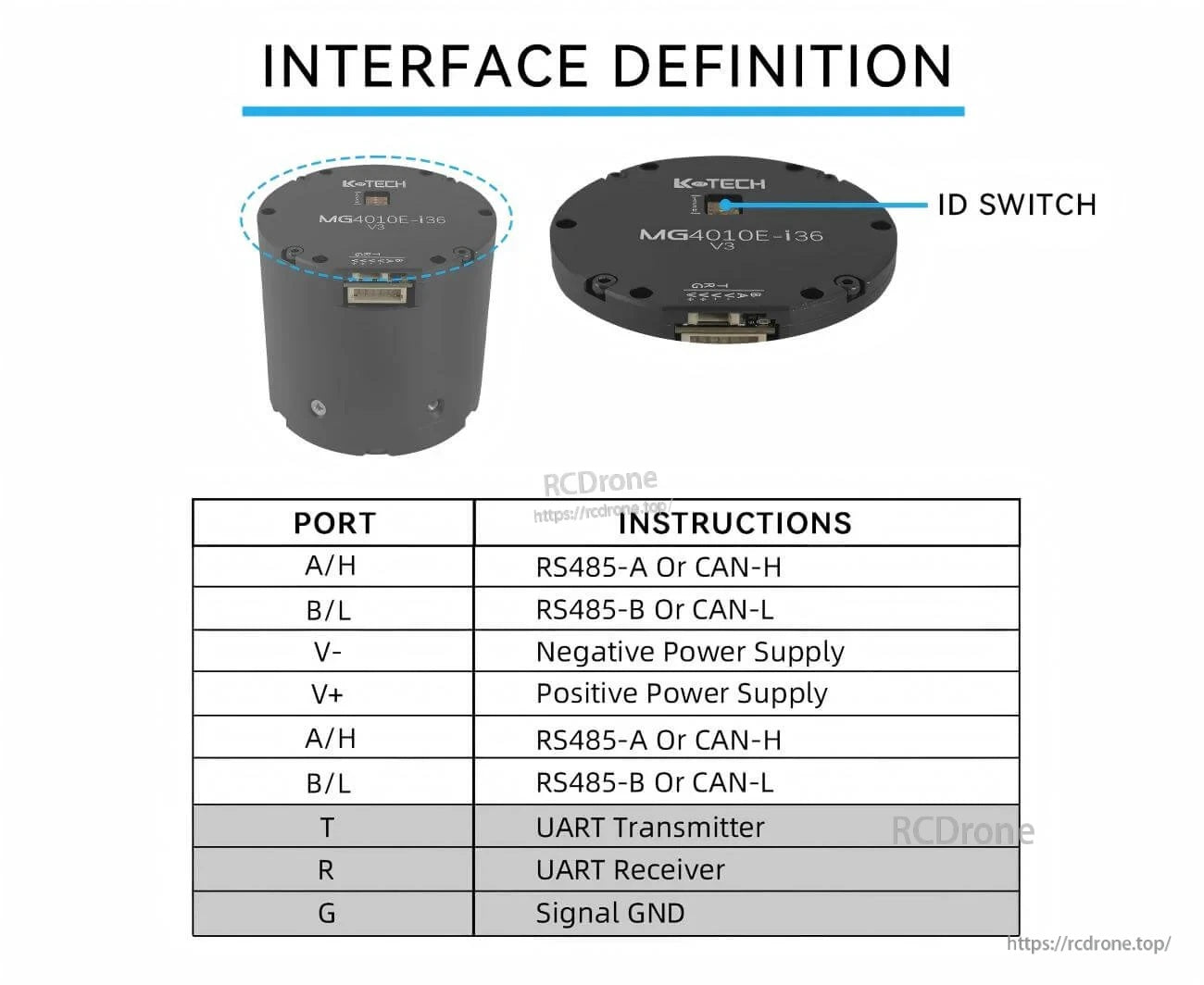
वायरिंग को लेबल किए गए RS485/CAN बस पिन, पावर कनेक्शन, UART Tx/Rx, सिग्नल ग्राउंड, और एक ऑनबोर्ड ID स्विच के साथ सरल बनाया गया है।
निर्मित ब्रेक नियंत्रण और कई संचालन मोड विभिन्न गति-नियंत्रण कार्यों और सुरक्षा आवश्यकताओं के लिए व्यवहार को समायोजित करने में मदद करते हैं।
Related Collections




