




LKMTECH MG5010E-i10-V3 मोटर 24V 160W 1:10 प्लैनेटरी गियर रिड्यूसर, RS485/CAN, 18-बिट एन्कोडर
LKMTECH MG5010E-i10-V3 मोटर 24V 160W 1:10 प्लैनेटरी गियर रिड्यूसर, RS485/CAN, 18-बिट एन्कोडर
LKMTECH
पिकअप उपलब्धता लोड नहीं की जा सकी
Overview
एलकेएमटेक MG5010E-i10-V3 मोटर एक ब्रशलेस मोटर है जिसमें एक ग्रह गियर रिड्यूसर और रोबोटिक्स और मोशन-कंट्रोल अनुप्रयोगों के लिए एकीकृत एन्कोडर है। इसे 24V संचालन के लिए निर्दिष्ट किया गया है और अनुशंसित ड्राइव के साथ उपयोग करने पर RS485 या CAN संचार का समर्थन करता है।
मुख्य विशेषताएँ
- उच्च शक्ति ब्रशलेस मोटर + उच्च सटीकता ग्रह गियर रिड्यूसर
- रेटेड टॉर्क 4 N.m; अधिकतम टॉर्क 7 N.m
- रिडक्शन अनुपात 1:10 (रिड्यूसर प्रकार: PG5110)
- 18-बिट मैग्नेटिक एन्कोडर (मोटर साइड)
- संचार विकल्प: RS485 या CAN (अनुशंसित ड्राइव DG40E के साथ)
- मोटर तापमान: हाँ
- मोटर और ड्राइवर तापमान की वास्तविक समय निगरानी के लिए डुअल तापमान सेंसर इंटरफेस
- ड्राइव हाइलाइट्स दिखाए गए: इनपुट वोल्टेज 7।4-32V; RS485 या CAN बस संचार; पावर ऑफ के बाद शून्य बिंदु मेमोरी के साथ डुअल एन्कोडर
विशेषताएँ
| आइटम का नाम | MG5010E-i10-V3 |
| रेटेड वोल्टेज | 24V |
| अधिकतम गति | 320RPM |
| रेटेड स्पीड | 235RPM |
| रेटेड टॉर्क | 4 N.m |
| अधिकतम टॉर्क | 7 N.m |
| रेटेड करंट | 4.4A |
| अधिकतम पावर | 160W |
| स्पीड कॉन्स्टेंट | 97.9 rpm/V |
| टॉर्क कॉन्स्टेंट | 0.1 N.m/A |
| टर्न्स | 13 |
| वाइंडिंग प्रकार | Y |
| फेज प्रतिरोध | 0.466Ω |
| फेज इंडक्टेंस | 0.26mH |
| मोटर पोल्स | 28 |
| रोटर जड़ता | 850 gcm² |
| मोटर तापमान | हाँ |
| रिड्यूसर प्रकार | PG5110 |
| रिडक्शन अनुपात | 1:10 |
| बैकलैश | 6 आर्कमिन (≤8 आर्कमिन के रूप में भी सूचीबद्ध) |
| बेयरिंग रेटेड लोड | 1000N |
| मोटर वजन | 420g |
| आकार | Φ63*41.5 |
| सिफारिश की ड्राइव | DG40E |
| ड्राइव इनपुट वोल्टेज | 7.4-32V |
| संचार | RS485 या CAN |
| संचार आवृत्ति | RS485: 500Hz (115200bps) / CAN: 2KHz (1Mbps) |
| एन्कोडर | 18बिट मैग्नेटिक एन्कोडर |
| एन्कोडर बौडरेट (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| बौडरेट (CAN) | 1M |
| नियंत्रण मोड | टॉर्क लूप (32KHz) / स्पीड लूप (8KHz) / पोजीशन लूप (4KHz) |
| त्वरण वक्र | ट्रेपेज़ॉइडल त्वरण |
इंटरफेस परिभाषा
| इंटरफेस | नोट |
|---|---|
| A/H | RS485-A या CAN-H |
| B/L | RS485-B या CAN-L |
| V- | नकारात्मक पावर सप्लाई |
| वी+ | सकारात्मक पावर सप्लाई |
| ए/एच | आरएस485-ए या सीएएन-एच |
| बी/एल | आरएस485-बी या सीएएन-एल |
| टी | यूएआरटी ट्रांसमीटर |
| आर | यूएआरटी रिसीवर |
| जी | सिग्नल जीएनडी |
अनुप्रयोग
- मानवाकार रोबोट
- रोबोटिक हाथ
- एक्सोस्केलेटन / पहनने योग्य रोबोट
- चतुर्भुज रोबोट / रोबोट कुत्ता प्लेटफार्म
- एजीवी वाहन / एजीवी कार
- एआरयू रोबोट
चयन मार्गदर्शन और एकीकरण समर्थन के लिए, संपर्क करें https://rcdrone.top/ या ईमेल करें [email protected] .
हस्तनिर्मित
विवरण

MG5010E-i10-V3 एक कॉम्पैक्ट एक्चुएटर में ब्रशलेस मोटर और ग्रह गियरबॉक्स को एकीकृत करता है जो रोबोटिक्स और गति नियंत्रण के लिए है।

1:10 ग्रह गियर रिड्यूसर उच्च टॉर्क और स्थिति स्थिरता प्रदान करने में मदद करता है जो संयुक्त और पहिया-ड्राइव निर्माण के लिए आवश्यक है।


मोटर साइड पर 18-बिट मैग्नेटिक एन्कोडर सटीक फीडबैक का समर्थन करता है; कुछ सेटअप सहायक रिड्यूसर-साइड एन्कोडर का भी उपयोग करते हैं।
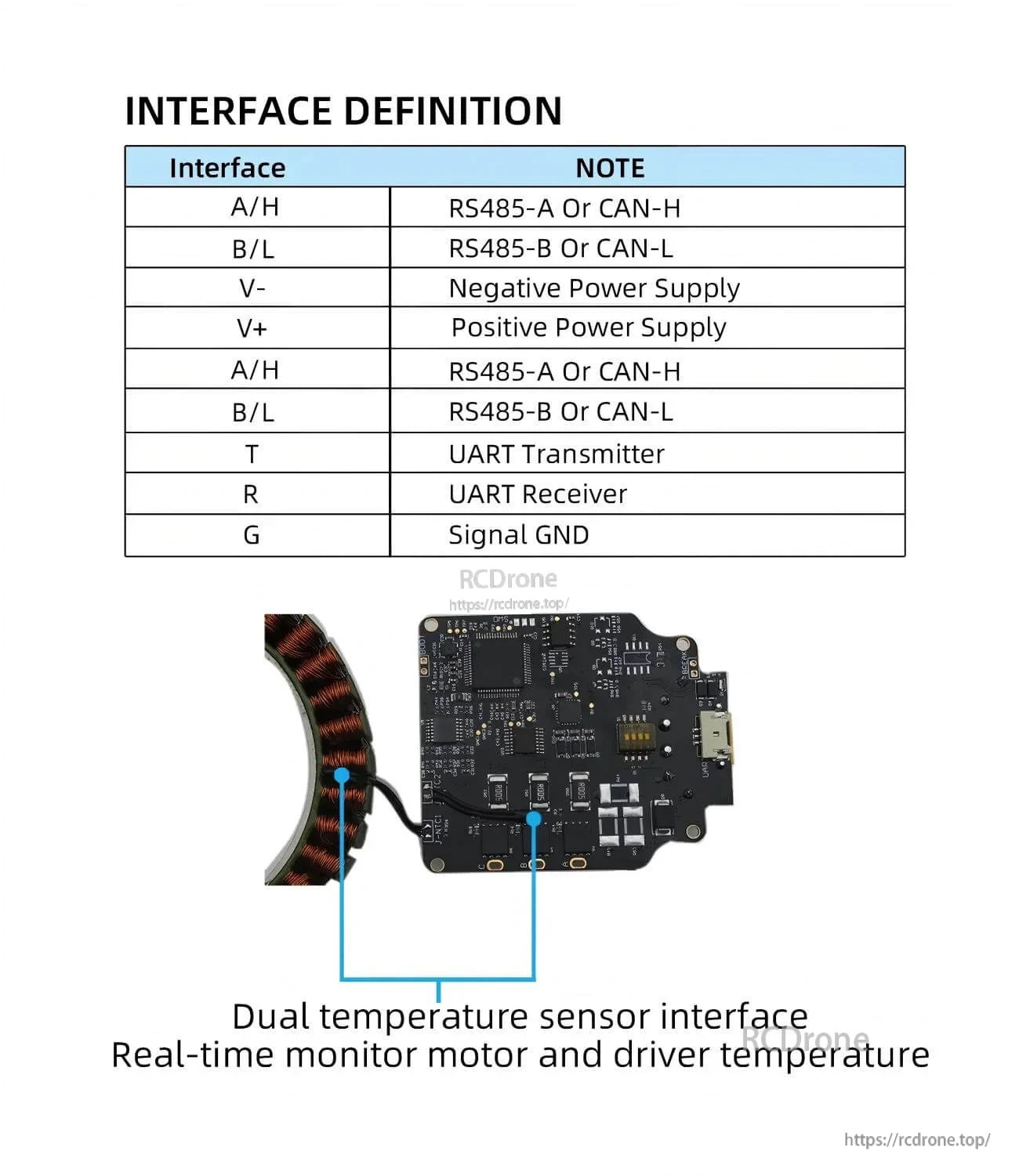
स्पष्ट पिन परिभाषाएँ और डुअल तापमान-सेंसर इनपुट वायरिंग को सरल बनाते हैं और वास्तविक समय में मोटर/ड्राइवर थर्मल मॉनिटरिंग की अनुमति देते हैं।
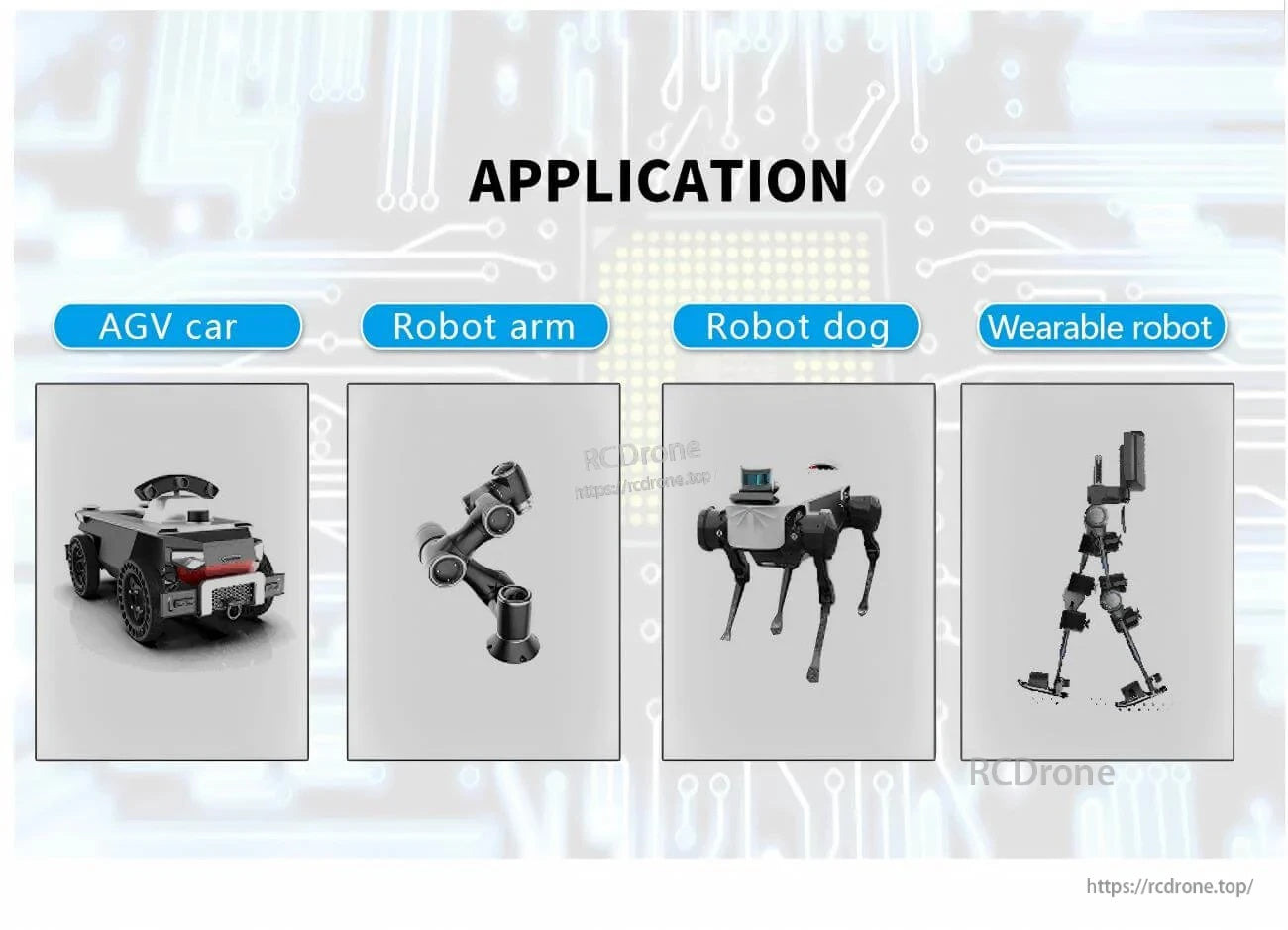 ऐसे प्लेटफार्मों के लिए उपयुक्त जैसे AGVs, रोबोटिक आर्म्स, चौपायों, और पहनने योग्य रोबोट जहां कॉम्पैक्ट टॉर्क की आवश्यकता होती है।
ऐसे प्लेटफार्मों के लिए उपयुक्त जैसे AGVs, रोबोटिक आर्म्स, चौपायों, और पहनने योग्य रोबोट जहां कॉम्पैक्ट टॉर्क की आवश्यकता होती है।
Related Collections




