MATEK CAN-L4-BM - Mateksys AP_PERIPH CAN डिजिटल पावर मॉनिटर
MATEK CAN-L4-BM - Mateksys AP_PERIPH CAN डिजिटल पावर मॉनिटर
MATEKSYS
पिकअप उपलब्धता लोड नहीं की जा सकी
MATEK CAN-L4-BM - Mateksys AP_PERIPH CAN डिजिटल पावर मॉनिटर विशिष्टताएँ
उपयोग: वाहन और रिमोट कंट्रोल खिलौने
अनुशंसित आयु: 12+y,14+y
उत्पत्ति: मुख्यभूमि चीन
सामग्री: मिश्रित सामग्री
ब्रांड नाम: MATEKSYS
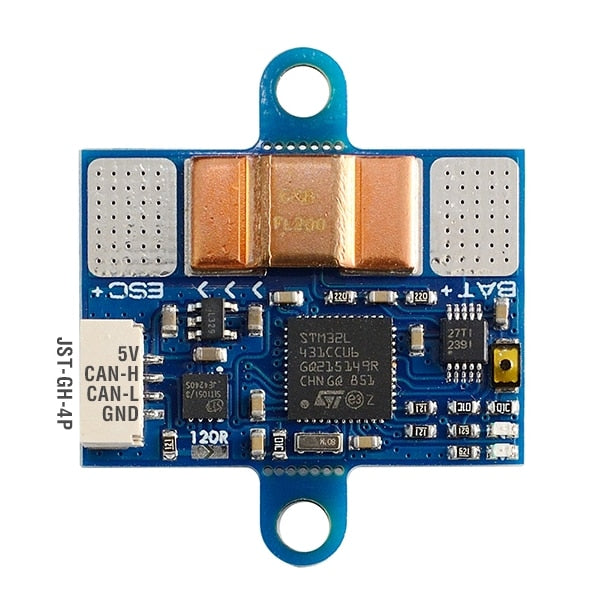
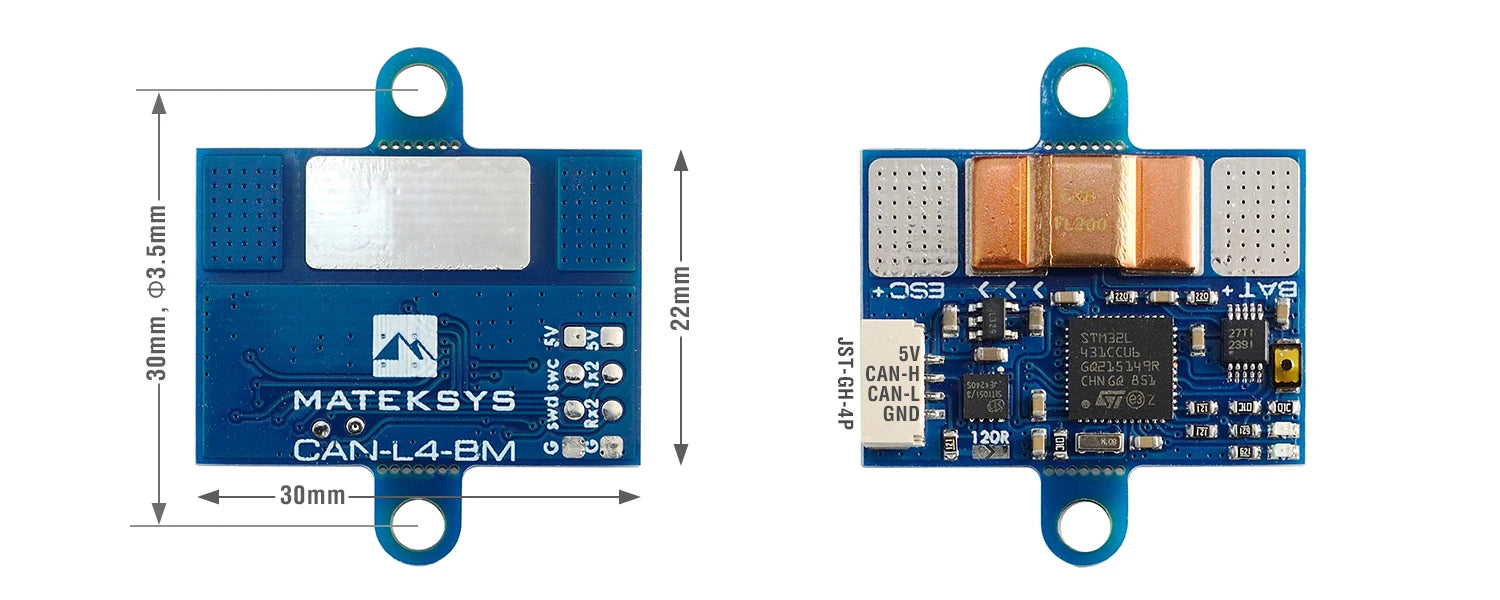
AP_PERIPH कैन डिजिटल पावर मॉनिटर, CAN-L4-BM
वर्तमान 0~204.8ए, वोल्टेज 0~85V, CAN/DroneCAN प्रोटोकॉल
-
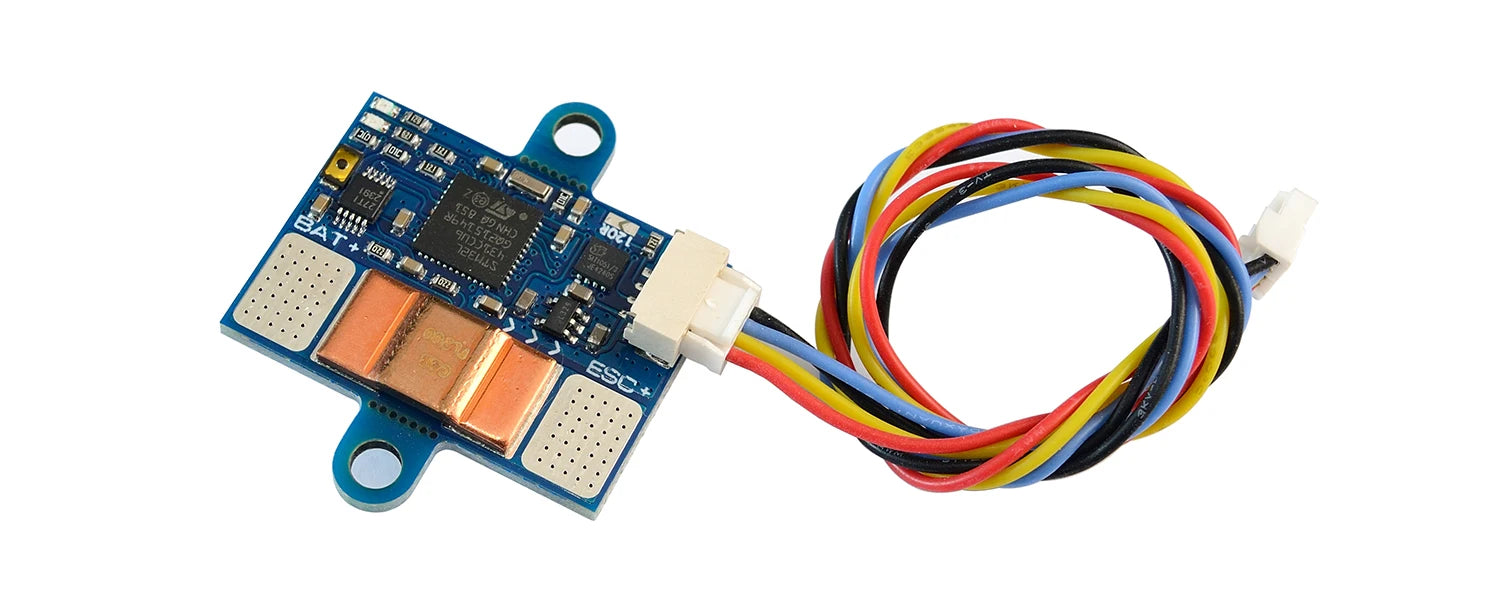
CAN-L4-BM TI INA239 और ArudPilot AP_Periph फर्मवेयर पर आधारित एक अति-सटीक डिजिटल पावर मॉनिटर है।
-
इस प्रवाहकीय पथ का प्रतिरोध 200 μΩ विशिष्ट है, जो अनुप्रयोग में कम बिजली हानि प्रदान करता है।
-
इस डिवाइस के साथ, किसी अंशांकन की आवश्यकता नहीं है, ड्रोनकैन प्रोटोकॉल का समर्थन करने वाला उड़ान नियंत्रक आसानी से CAN बस के माध्यम से सटीक वर्तमान और बस वोल्टेज रीडआउट प्राप्त कर सकता है।
विनिर्देश
-
MCU: STM32L431xC, 256KB फ़्लैश
-
INA239 85-V, 16-बिट, SPI इंटरफ़ेस के साथ उच्च परिशुद्धता पावर मॉनिटर IC
-
बैटरी वोल्टेज सेंस इनपुट: 0~85V
-
वर्तमान सेंस रेंज: 0~204.8A
-
करंट सेंसिंग रेसिस्टर पर लोड करंट: 150A(निरंतर), 204.8A(बर्स्ट)
-
वोल्टेज सटीकता: ± 0.1%
-
वर्तमान सटीकता: ± 2%
-
इंटरफ़ेस
-
CAN, ड्रोनकैन प्रोटोकॉल
-
UART2, अतिरिक्त, DFU
-
ST डिबग, SWCLK और SWDIO
-
-
LED
-
नीला, तेज़ ब्लिंकिंग, बूटिंग
-
नीला, धीमी गति से झपकना, काम करना
-
लाल, 3.3V सूचक
-
CAN-L4-BM बोर्ड के लिए बिजली की आपूर्ति: 4.5~5.5V @5V पैड/पिन
-
बिजली की खपत: 10mA
-
ऑपरेटिंग तापमान: -40~85 डिग्री सेल्सियस
-
भौतिक
-
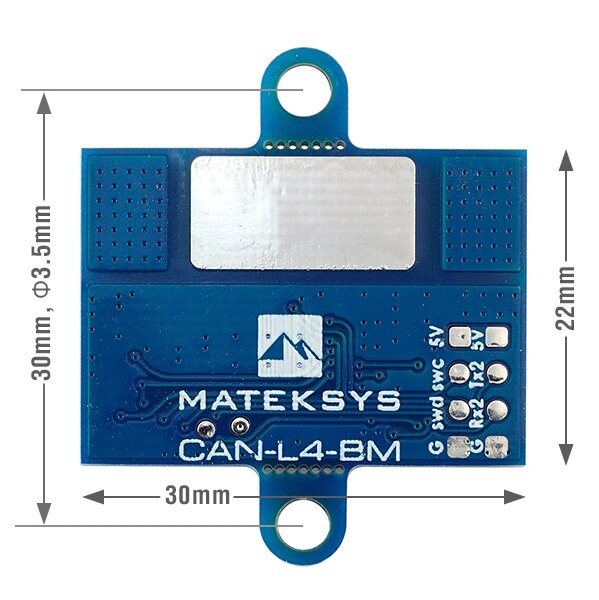
बोर्ड का आकार: 30मिमी*22मिमी*3मिमी। 4जी<टी10526>
-
3D फ़ाइल: CAN-L4-BM_STEP.zip
-
-
फर्मवेयर
-
ArduPilot AP_Periph·MatekL431-BattMon
-
DroneCAN GUI टूल के माध्यम से अपडेट करें
-
-
पैरामीटर
-
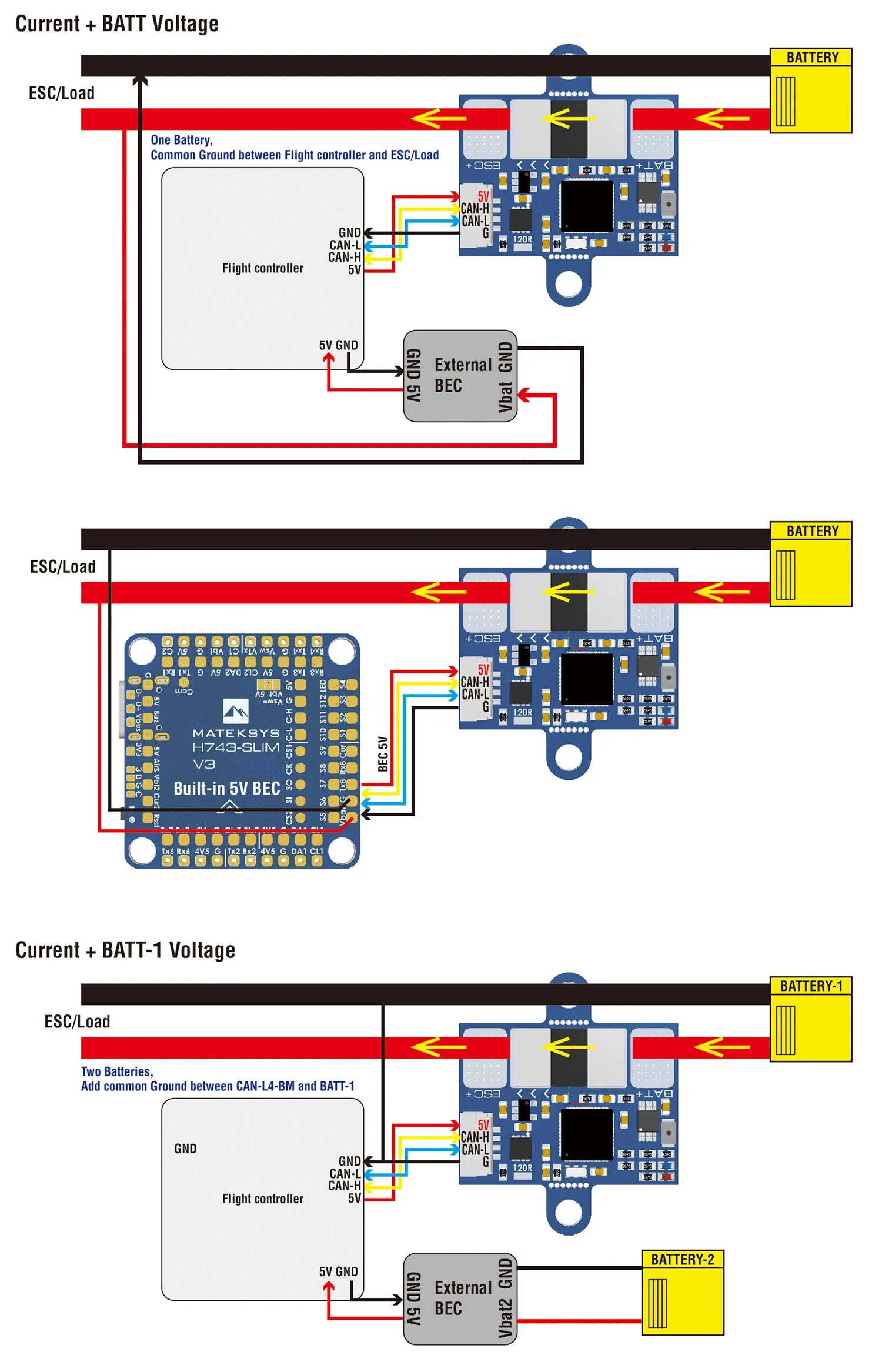
CAN_P1_DRIVER = 1 यदि CAN बस1 पोर्ट से जुड़ा है या CAN_P2_DRIVER = 1 यदि CAN बस2 पोर्ट से जुड़ा है
-
BATTx_MONITOR = 8 (DroneCAN-BatteryInfo)
-
पैकिंग
-
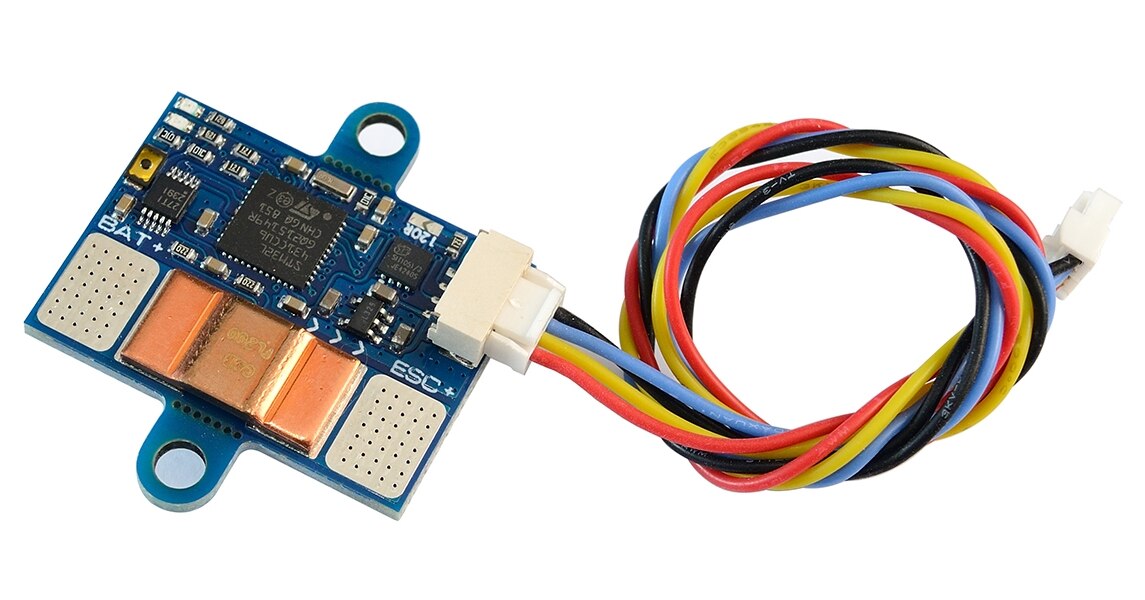
1x CAN-L4-BM बोर्ड
-
1x JST-GH-4P से JST-GH-4P 20 सेमी सिलिकॉन तार
टिप्स
-
नीचे की तरफ बड़ा पैड एक मृत पैड है। इस पर कोई सर्किट नेटवर्क नहीं है।
-
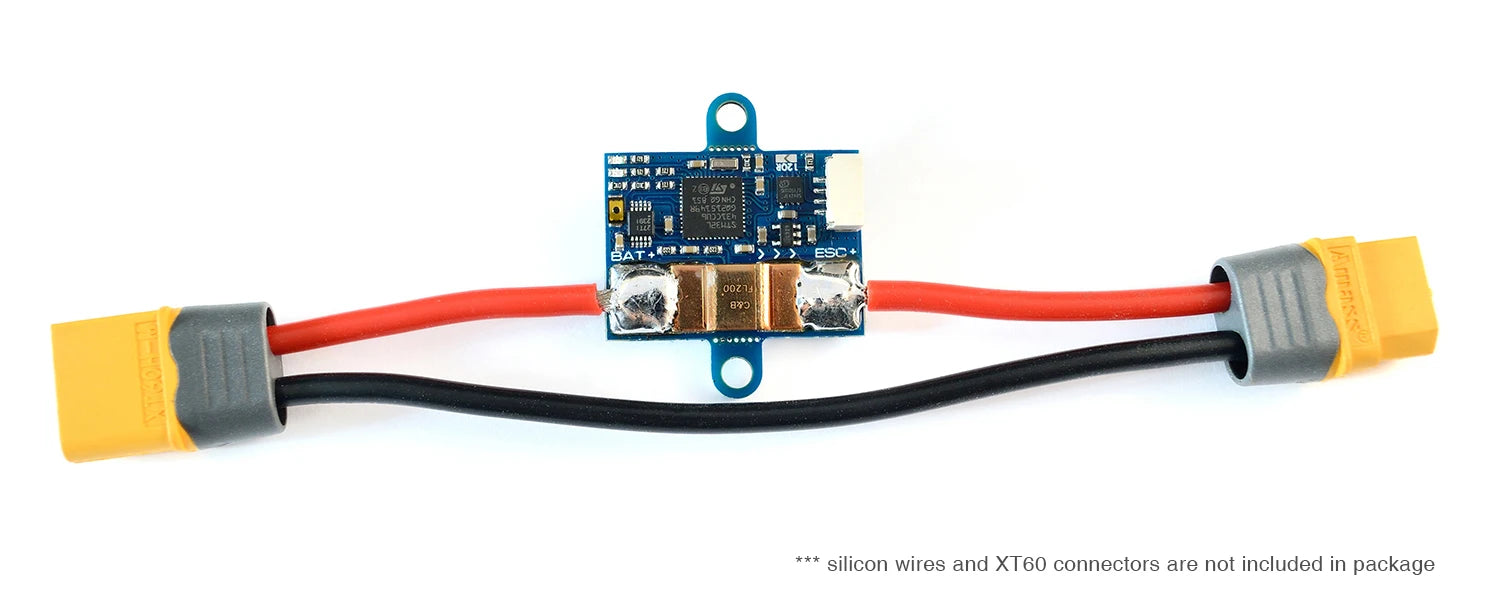
पॉजिटिव तारों को करंट सेंसिंग रेसिस्टर के दोनों तरफ जितना संभव हो सके सोल्डर करें।
-
यदि आपको इसकी आवश्यकता नहीं है तो माउंटिंग के लिए 2 कान काटे जा सकते हैं।
-
यदि CAN तार बहुत लंबे हैं, तो "120R" जम्पर को पाट दें।
Related Collections