MATEK M10-L4-3100 जीपीएस मॉड्यूल - Mateksys AP_PERIPH GNSS u-blox MAX-M10S RM3100
MATEK M10-L4-3100 जीपीएस मॉड्यूल - Mateksys AP_PERIPH GNSS u-blox MAX-M10S RM3100
MATEKSYS
पिकअप उपलब्धता लोड नहीं की जा सकी
MATEK M10-L4-3100 - Mateksys AP_PERIPH GNSS विनिर्देश
उपयोग: वाहन और रिमोट कंट्रोल खिलौने
अनुशंसित आयु: 12+y,14+y,6-12y
उत्पत्ति: मुख्यभूमि चीन
सामग्री: मिश्रित सामग्री
ब्रांड नाम: MATEKSYS
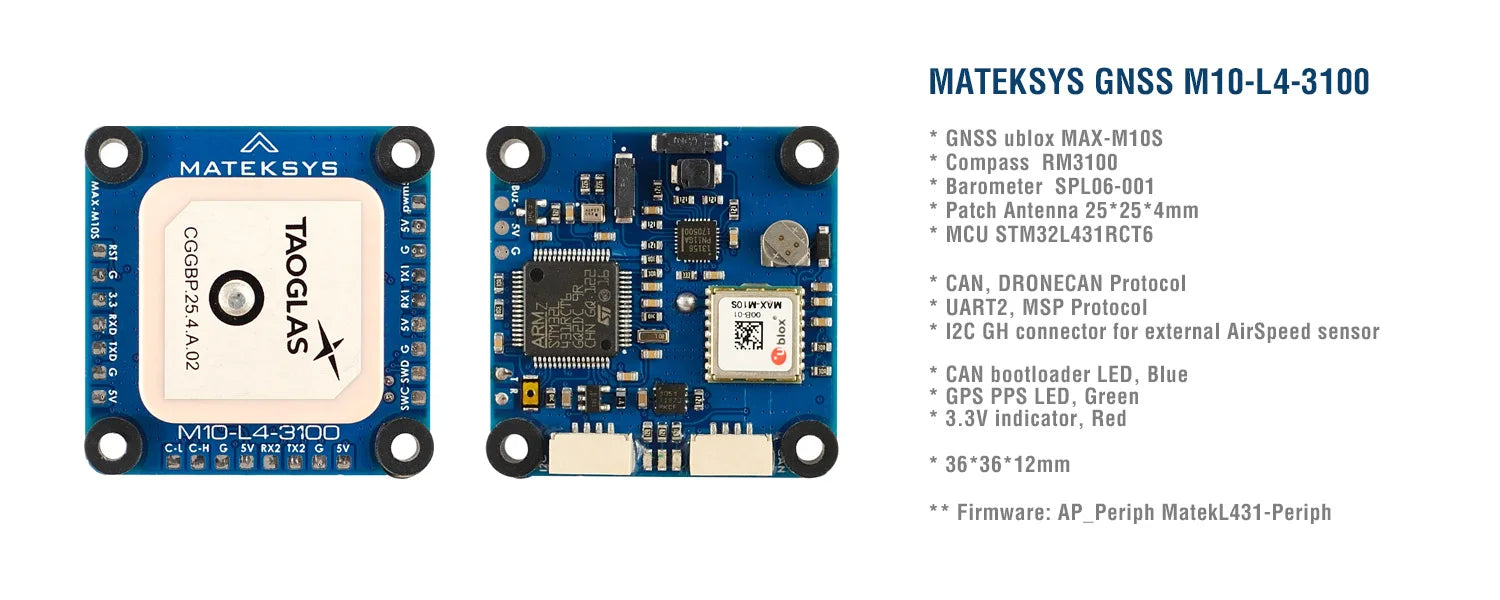
AP_PERIPH GNSS M10-L4-3100
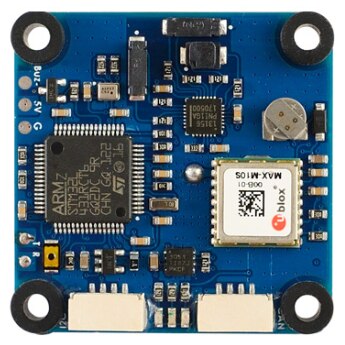
AP_Periph L431 CAN नोड, MAX-M10S, RM3100, SPL06-001, DroneCAN प्रोटोकॉल और UART_MSP
-
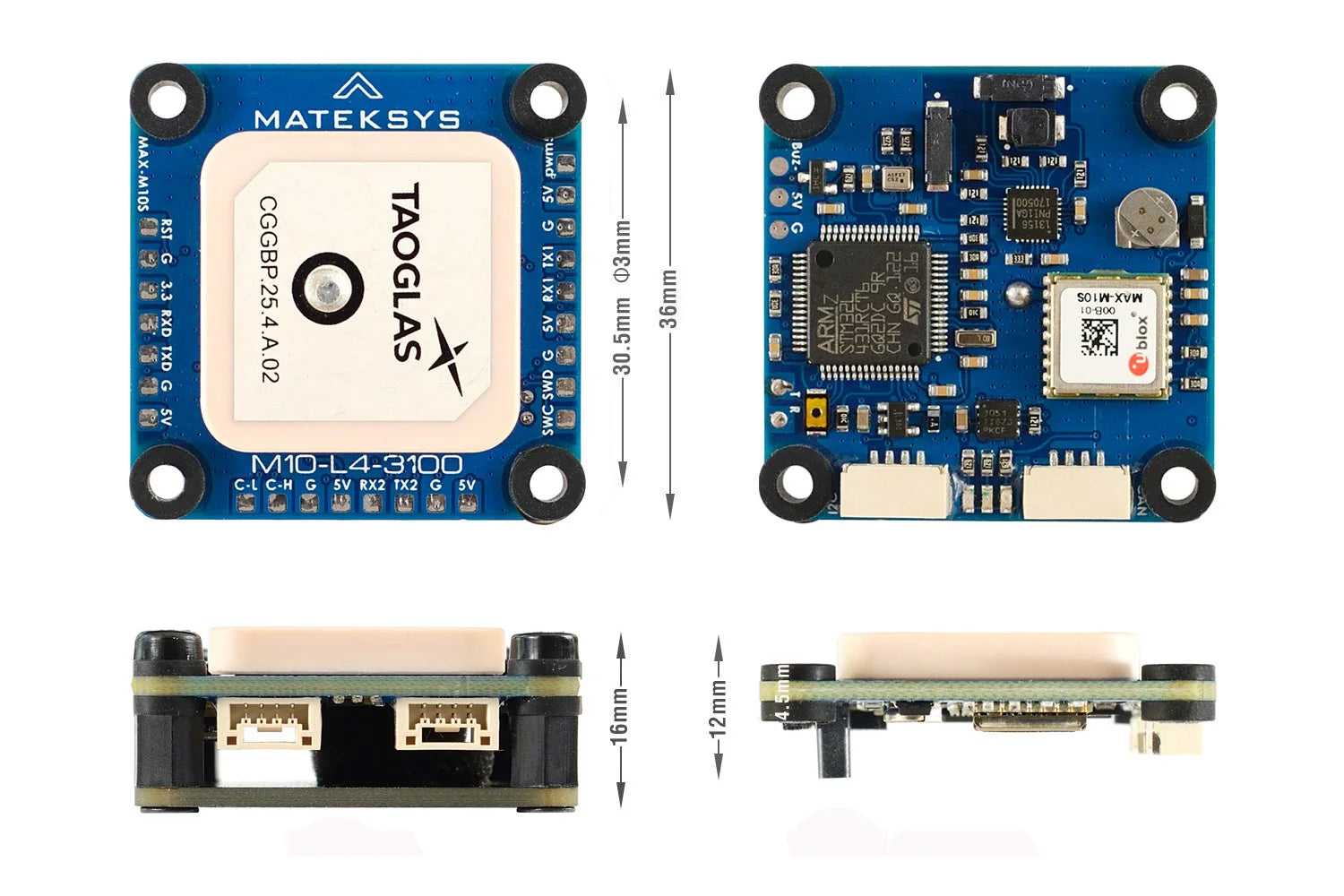
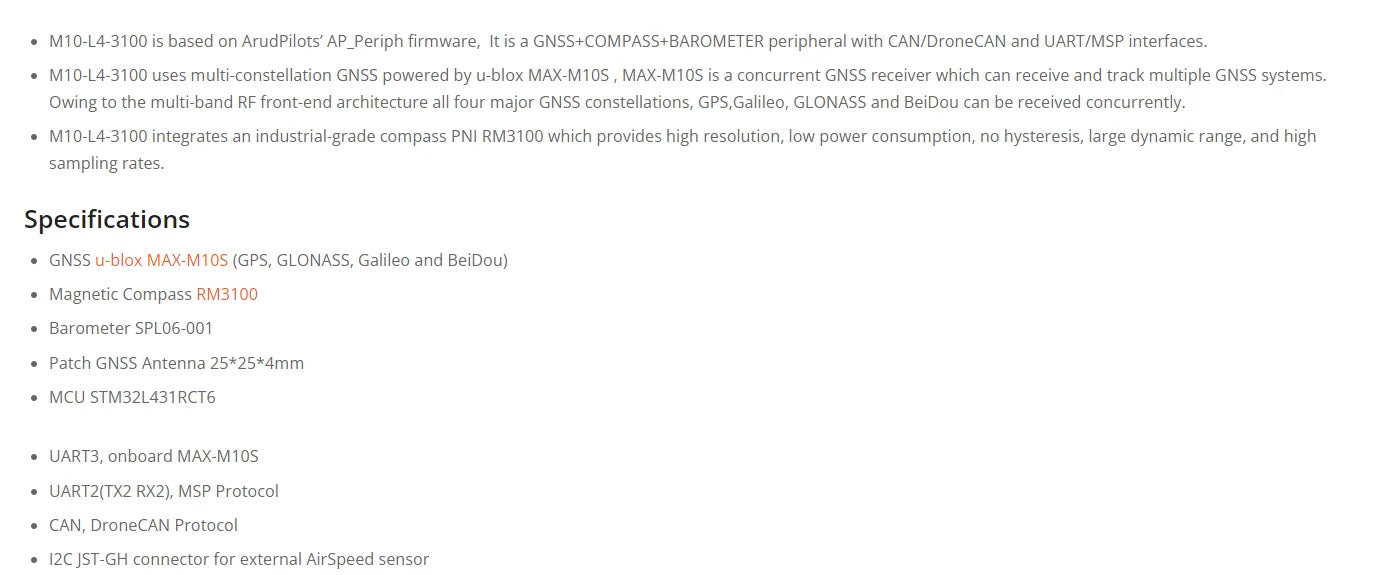
M10-L4-3100 ArudPilots के AP_Periph फर्मवेयर पर आधारित है। यह CAN/DroneCAN और UART/MSP इंटरफेस के साथ एक GNSS+COMPASS+BAROMETER परिधीय है।
-
M10-L4-3100 यू-ब्लॉक्स MAX-M10S द्वारा संचालित बहु-तारामंडल GNSS का उपयोग करता है, MAX-M10S एक समवर्ती GNSS रिसीवर है जो कई GNSS सिस्टम प्राप्त और ट्रैक कर सकता है। मल्टी-बैंड आरएफ फ्रंट-एंड आर्किटेक्चर के कारण सभी चार प्रमुख जीएनएसएस तारामंडल, जीपीएस, गैलीलियो, ग्लोनास और बेइदौ को एक साथ प्राप्त किया जा सकता है।
-
M10-L4-3100 एक औद्योगिक-ग्रेड कंपास PNI RM3100 को एकीकृत करता है जो उच्च रिज़ॉल्यूशन, कम बिजली की खपत, कोई हिस्टैरिसीस, बड़ी गतिशील रेंज और उच्च नमूना दर प्रदान करता है।

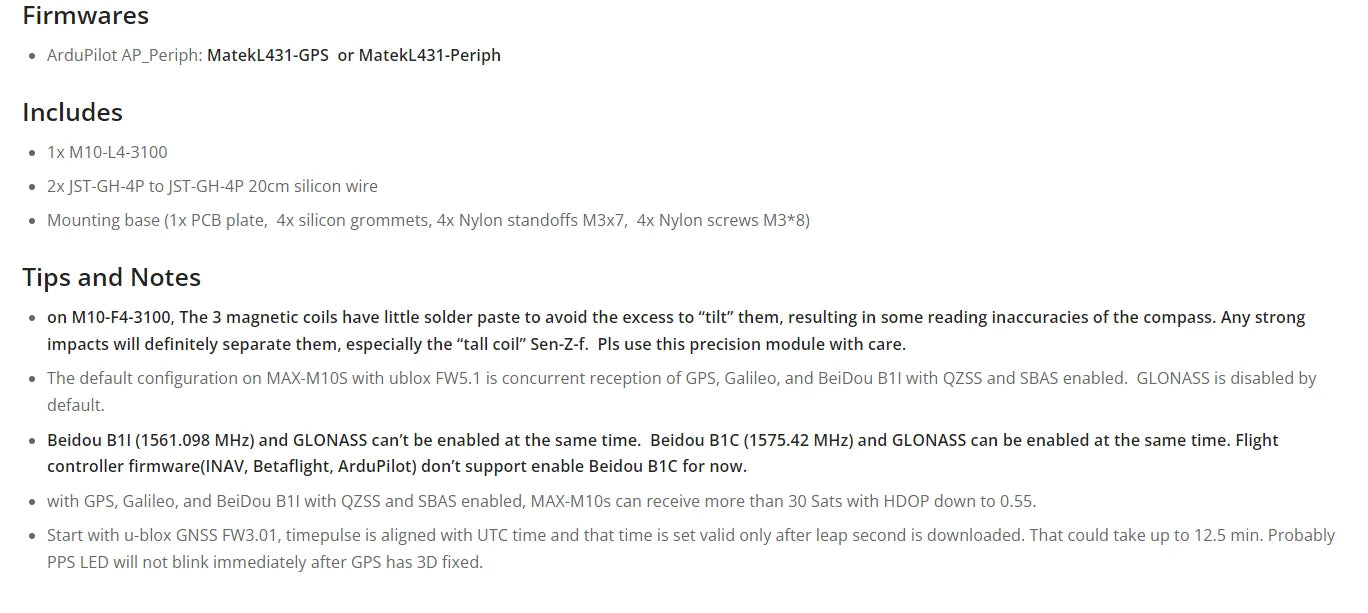
ublox FWS के साथ MAX-M1OS पर डिफ़ॉल्ट कॉन्फ़िगरेशन। QZSS और SBAS सक्षम के साथ GPS, गैलीलियो और BeiDou BI का समवर्ती रिसेप्शन है। ग्लोनास डिफ़ॉल्ट रूप से Beidou B1I (1575.42 मेगाहर्ट्ज) अक्षम है और इसे एक ही समय में सक्षम नहीं किया जा सकता है।
CAN (UAVCAN प्रोटोकॉल) कनेक्शन
-
M10-L4-3100 5V — FC 4.5V ~ 5.3V
-
M10-L4-3100 CAN-H - FC उच्च कर सकते हैं
-
M10-L4-3100 CAN-L — FC कम हो सकता है
-
M10-L4-3100 G — FC G/GND
FC UAVCAN पैरामीटर्स(ArduPilot)
-
CAN_D1_PROTOCOL -> 1
-
CAN_P1_ड्राइवर -> 1
-
GPS_TYPE -> 9 (ड्रोनकैन)
-
COMPASS_TYPEMASK -> 0 (सुनिश्चित करें कि DroneCAN अनियंत्रित है)
———————————————————————–
यदि आप I2C एयरस्पीड सेंसर को M10-L4-3100 के I2C पोर्ट से कनेक्ट करते हैं
-
ARSPD_TYPE -> 8 (UAVCAN)
-
ARSPD_USE -> 1
और आपको M10-L4-3100 के I2C पोर्ट से जुड़े एयरस्पीड सेंसर के लिए CAN नोड पैरामीटर सेट करना होगा
मिशन प्लानर > प्रारंभिक सेटअप > वैकल्पिक हार्डवेयर > UAVCAN > SLCan मोड CAN1 > पैरामीटर्स
-
MS4525 ARSP_TYPE -> 1 (hwdef में डिफ़ॉल्ट)
-
MS5525 ARSP_TYPE -> 3 केवल 0x77 पते के साथ MS5525 का समर्थन करता है
-
SDP3X ARSP_TYPE -> 6
-
DLVR-L10D ARSP_TYPE -> 9
-
लिखें और रीबूट करें
———————————————————————–
यदि आप 2812LED DIN को PWM5 पैड से कनेक्ट करते हैं
-
NTF_LED_TYPES -> (सुनिश्चित करें कि DroneCAN चेक किया गया है)
SLCan मोड CAN1 > पैरामीटर्स
-
OUT5_फ़ंक्शन 120
-
NTF_LED_TYPES 455
-
AP_Periph fw ''MatekL431-Periph'' होना चाहिए, ''MatekL431-GPS'' में एमएसपी सुविधा अक्षम है
UART (MSP प्रोटोकॉल) कनेक्शन
-
M10-L4-3100 5V — FC 4.0V ~ 5.3V
-
M10-L4-3100 TX2 — एफसी अतिरिक्त UART_RX
-
M10-L4-3100 RX2 - FC अतिरिक्त UART_TX (आवश्यक नहीं)
-
M10-L4-3100 G — FC G/GND
ArduPilot (4.1.x से) FC पैरामीटर्स
-
Serialx_PROTOCOL = 32 (MSP) जहां x ऑटोपायलट पर कनेक्शन के लिए उपयोग किया जाने वाला सीरियल पोर्ट है।
-
Serialx_BAUD = 115 जहां x ऑटोपायलट पर कनेक्शन के लिए उपयोग किया जाने वाला सीरियल पोर्ट है।
-
GPS प्रकार = 19 (MSP)
-
BARO_PROBE_EXT = 4096 (MSP बारो)
-
BARO_PRIMARY = 1 (यदि आप एमएसपी बारो को प्राथमिक बारो के रूप में उपयोग करना चाहते हैं, अन्यथा डिफ़ॉल्ट के रूप में छोड़ दें)
-
COMPASS_TYPEMASK 0 (या सुनिश्चित करें कि एमएसपी बिट की जांच नहीं की गई है)
INAV (2.6 से) एफसी पैरामीटर्स
-
M10-L4-3100 एक अतिरिक्त UART पर INAV द्वारा समर्थित किसी भी उड़ान नियंत्रक के साथ संगत है।
-
पोर्ट टैब में, संबंधित UART पर एमएसपी सक्षम करें जिससे M10-L4-3100 जुड़ा हो। उस UART पर "GPS" सक्षम न करें। बॉड्रेट 115200 चुनें।
-
सुविधा जीपीएस
-
gps_provider = एमएसपी
सेट करें -
mag_hardware = एमएसपी
सेट करें -
सेट बारो_हार्डवेयर = एमएसपी
-
सेट एलाइन_मैग = सीW90, यदि कंपास को तीर के साथ आगे की ओर सपाट रखा गया है, और उड़ान नियंत्रक तीर भी आगे की ओर है।
Related Collections