माटेक एच743-स्लिम वी3 - माटेकिस उड़ान नियंत्रक
माटेक एच743-स्लिम वी3 - माटेकिस उड़ान नियंत्रक
MATEKSYS
पिकअप उपलब्धता लोड नहीं की जा सकी
MATEK H743-SLIM V3 - Mateksys उड़ान नियंत्रक विनिर्देश
उपयोग: वाहन और रिमोट कंट्रोल खिलौने
अनुशंसित आयु: 12+y,14+y,6-12y
उत्पत्ति: मुख्यभूमि चीन
सामग्री: मिश्रित सामग्री
वाहन प्रकार के लिए: हवाई जहाज
ब्रांड नाम: MATEKSYS
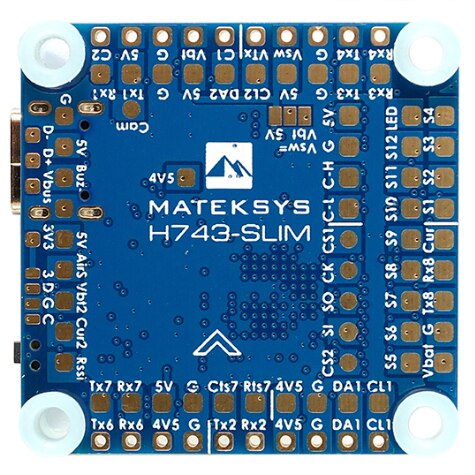
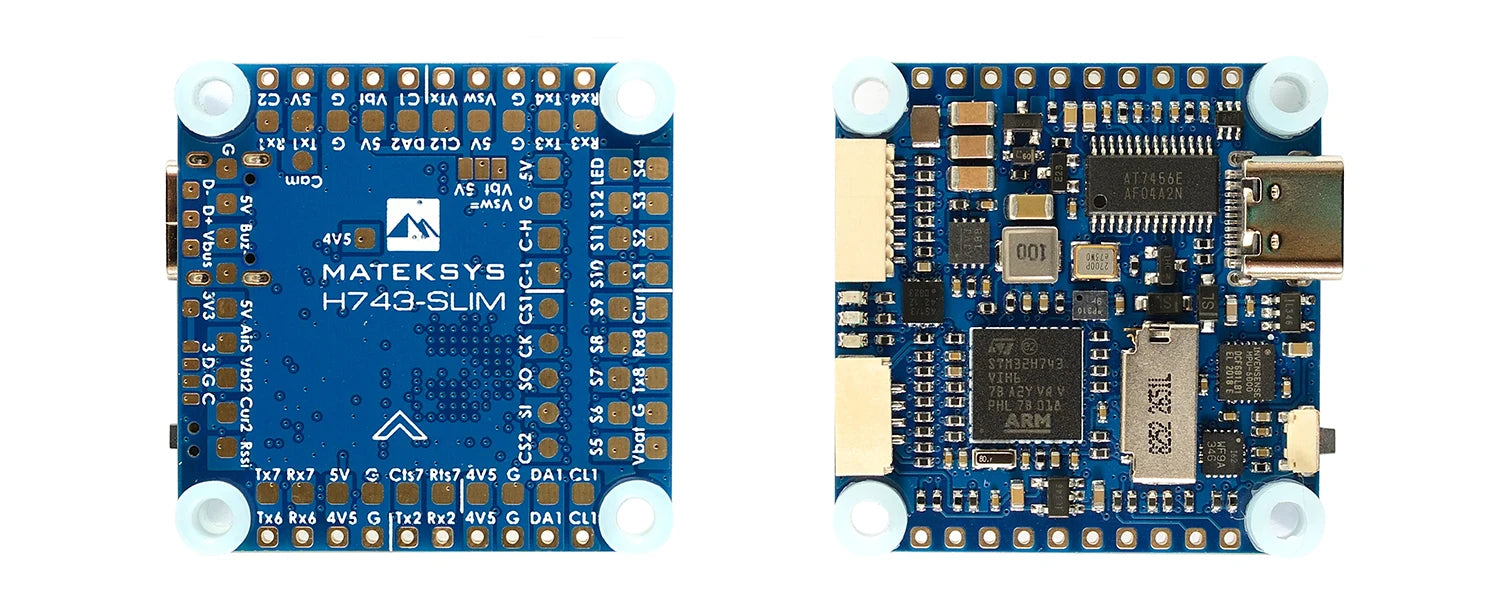
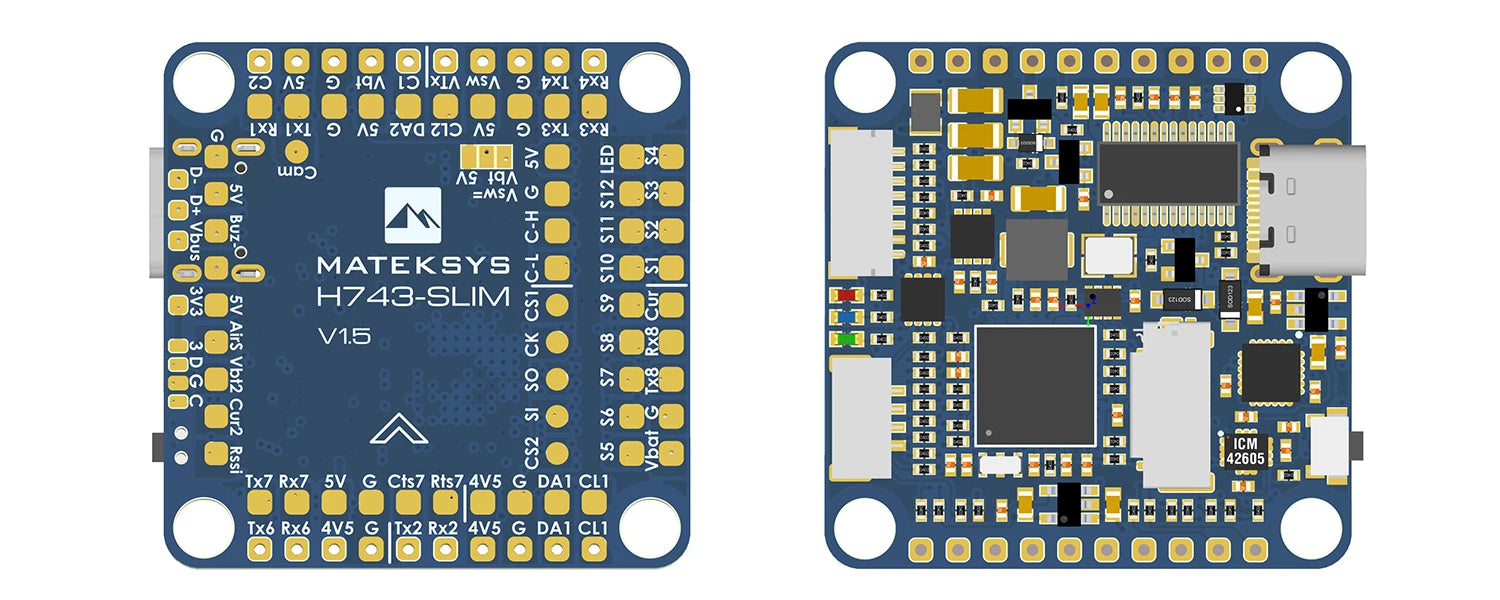
उड़ान नियंत्रक H743-स्लिम
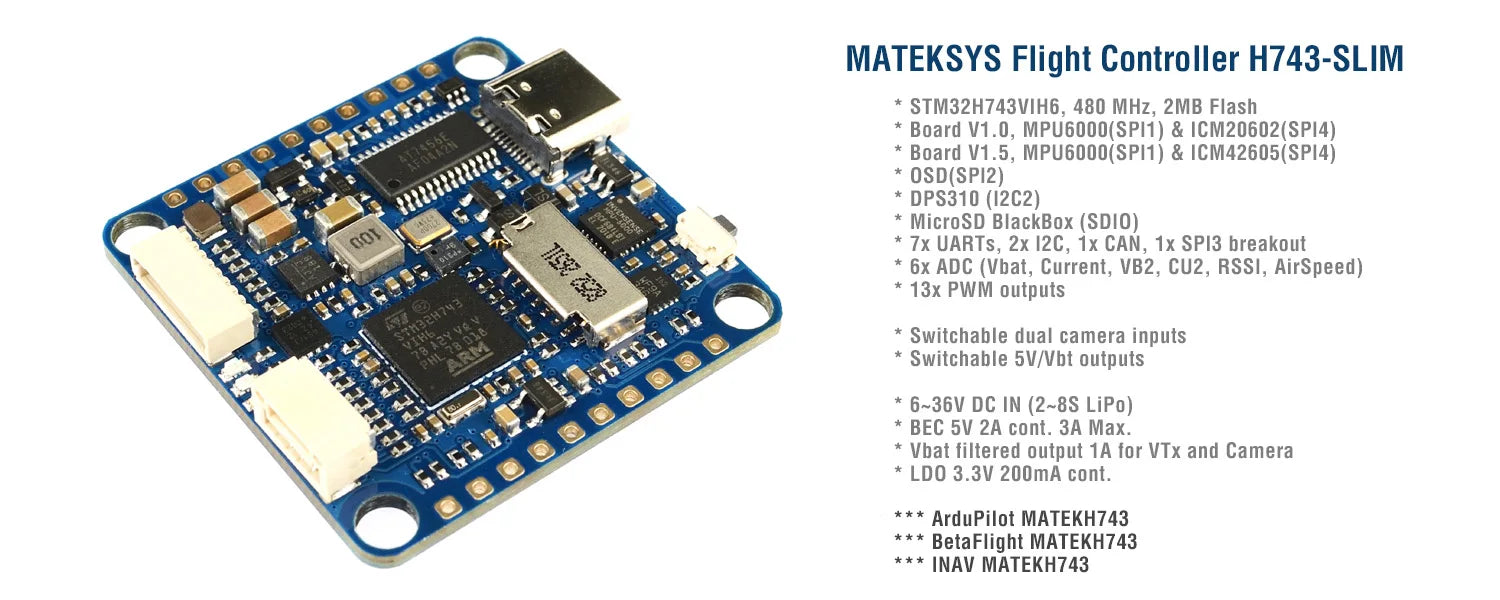
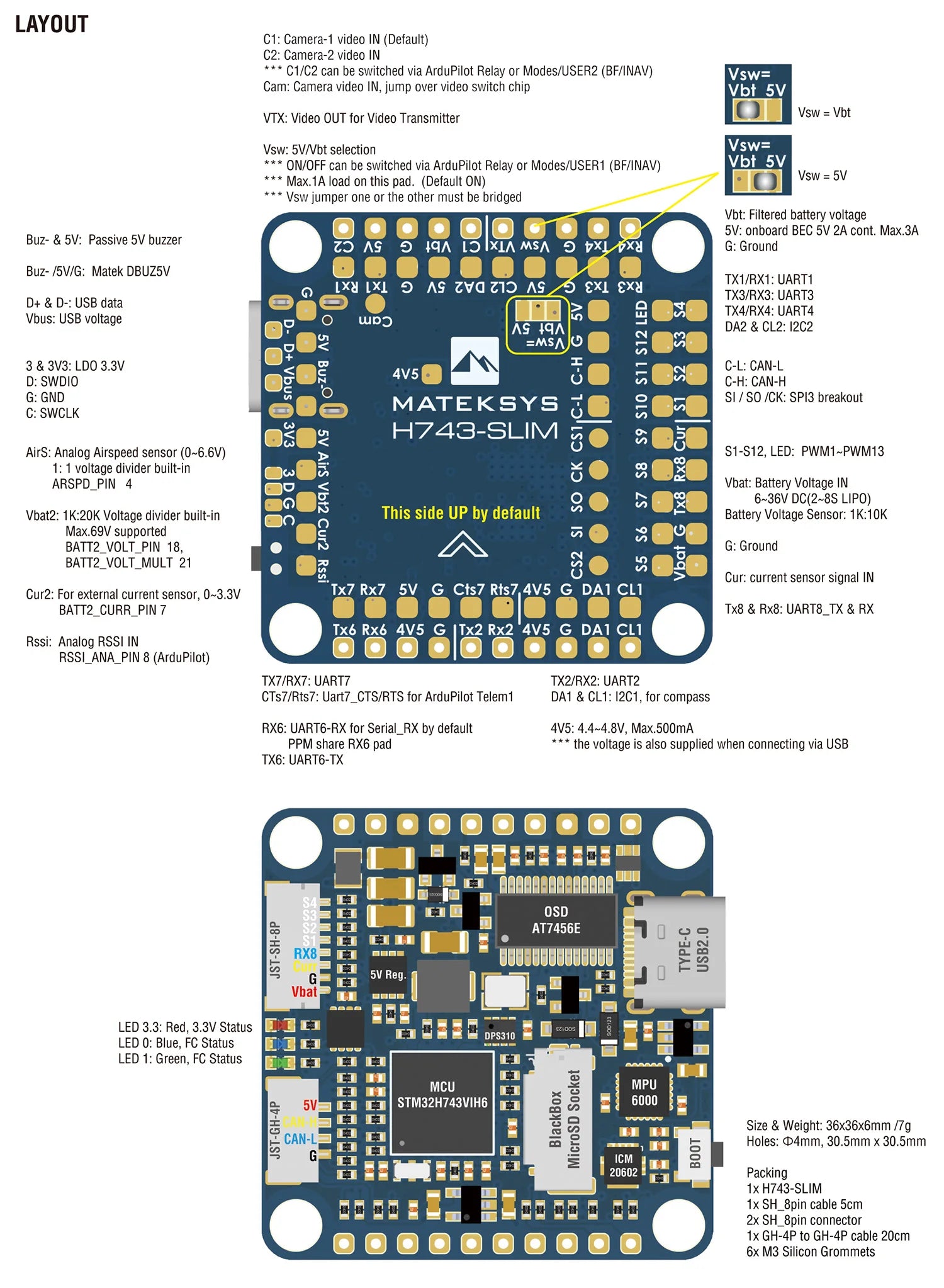
STM32H743VI, ICM20602 और MPU6000, DPS310, OSD, 7x UARTs, 2x I2C, 1xCAN, 13x PWM आउटपुट, BEC5V,
एफसी विशिष्टताएं
-
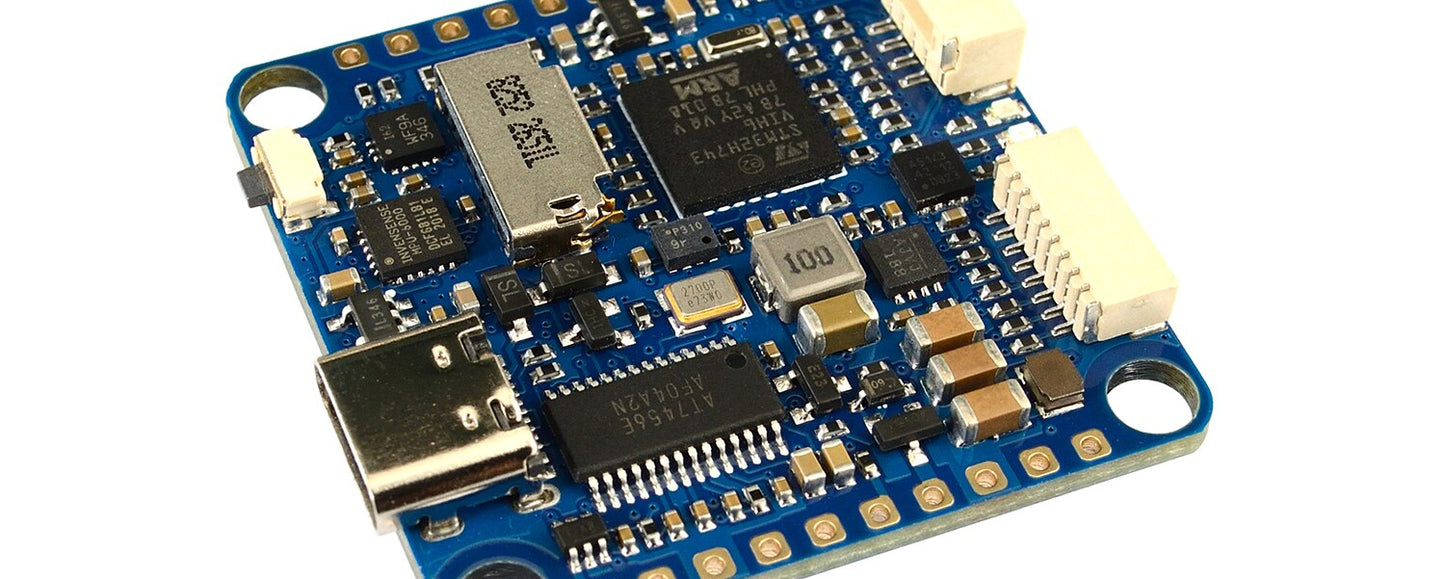
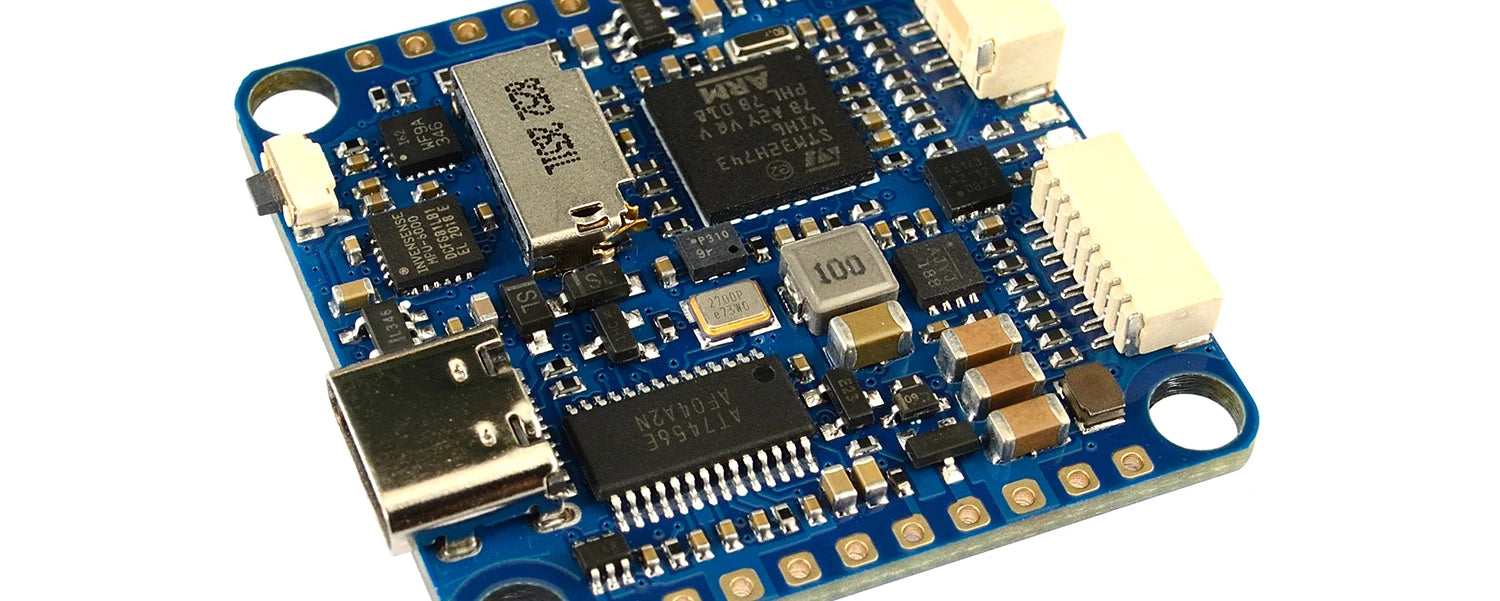
MCU: STM32H743VIH6, 480MHz, 1MB रैम, 2MB फ्लैश
-
बोर्ड V1.0 IMU: MPU6000 (SPI1) और ICM20602 (SPI4)
-
बोर्ड V1.5 IMU: MPU6000 (SPI1) और ICM42605 (SPI4)
-
बारो: इन्फिनियॉन DPS310 (I2C2)
-
ओएसडी: AT7456ई (एसपीआई2)
-
ब्लैकबॉक्स: माइक्रोएसडी कार्ड सॉकेट (एसडीआईओ)
-
7x Uarts (1,2,3,4,6,7,8) अंतर्निर्मित व्युत्क्रम के साथ।
-
13x PWM आउटपुट ("एलईडी" पैड सहित)
-
2x I2C
-
1x CAN
-
6x एडीसी (वीबीएटी, करंट, आरएसएसआई, एनालॉग एयरस्पीड, वीबीएटी2, क्यूर2)<टी6376>
-
एफसी स्टेटस के लिए 3x एलईडी (नीला, लाल) और 3.3V संकेतक (लाल)
-
1x SPI3 ब्रेकआउट
-
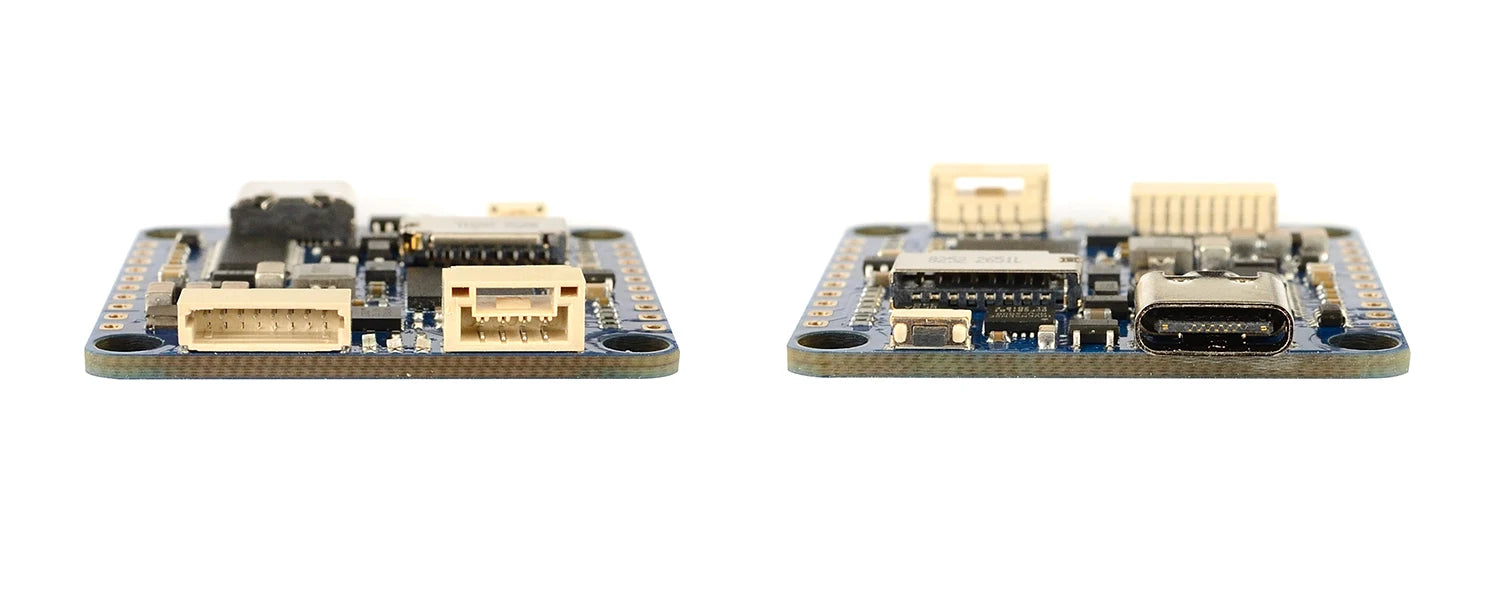
यूएसबी टाइप-सी(यूएसबी2.0)
-
1x JST-SH1.0_8pin कनेक्टर (Vbat/G/Curr/Rx8/S1/S2/S3/S4)
-
1x JST-GH1.25_4पिन कनेक्टर (5V/CAN-H/CAN-L/G)
-
दोहरी कैमरा इनपुट स्विच
-
5V/Vbat फ़िल्टर्ड पावर चालू/बंद स्विच
-
डीजेआई एफपीवी ओएसडी किसी भी अतिरिक्त यूएआरटी द्वारा समर्थित है
शक्ति
-
Vbat इनपुट: 6~36V (2~8S LiPo)
-
बीईसी: 5वी 2ए जारी। (अधिकतम3ए)
-
एलडीओ 3.3V: अधिकतम 200mA
-
कोई करंट सेंसर बिल्ट-इन नहीं
-
ADC Vbat2 पैड मैक्स को सपोर्ट करता है। 69V (वोल्टेज विभक्त: 1K:20K)
-
स्थैतिक शक्ति: 200mA@5V with बीटाफ़्लाइट, 150mA@5V with ArduPilot
एफसी फ़र्मवेयर
-
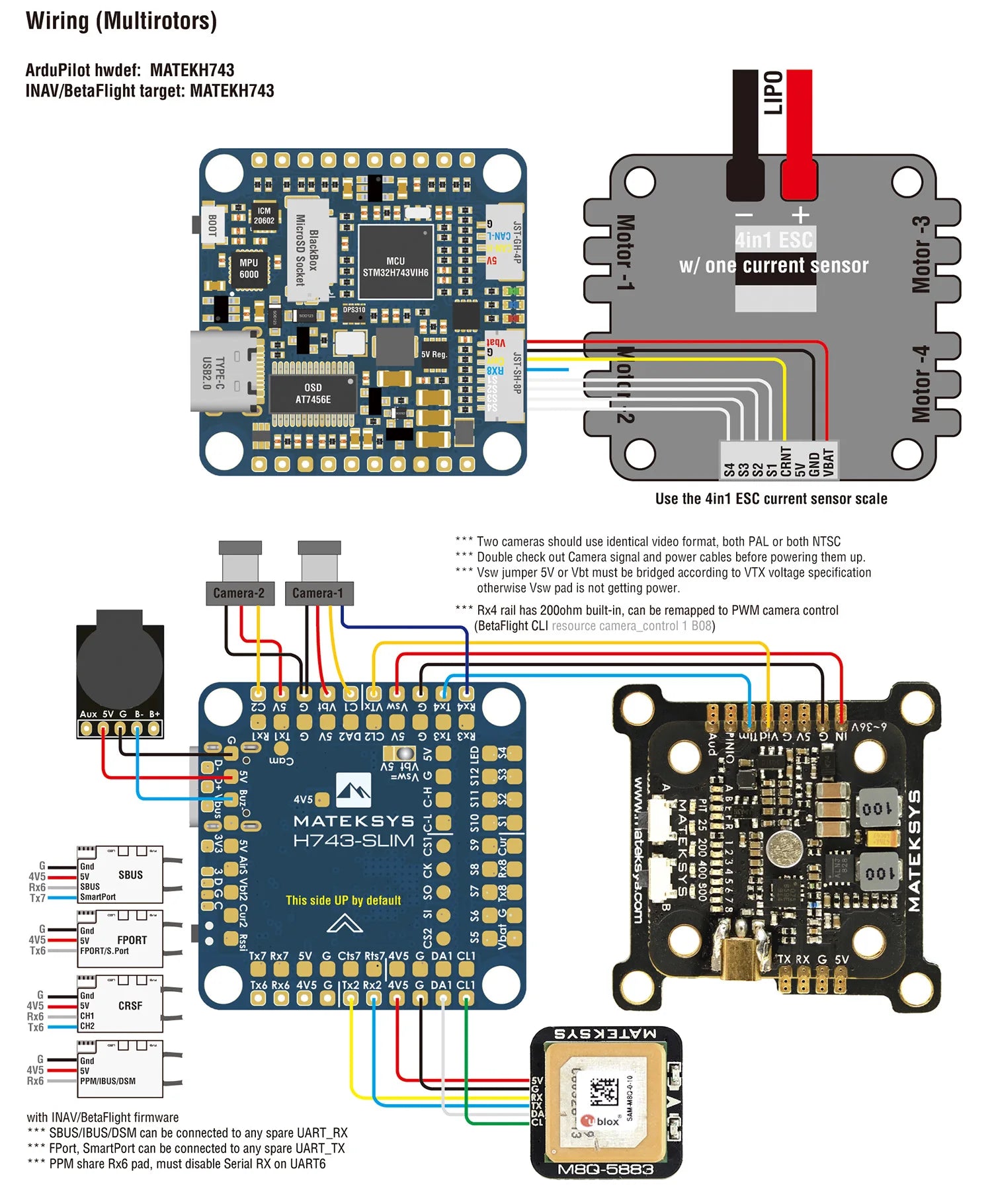
ArduPilot(ChiBiOS): MATEKH743
-
बीटाफ्लाइट: MATEKH743
-
INAV: MATEKH743
भौतिक
-
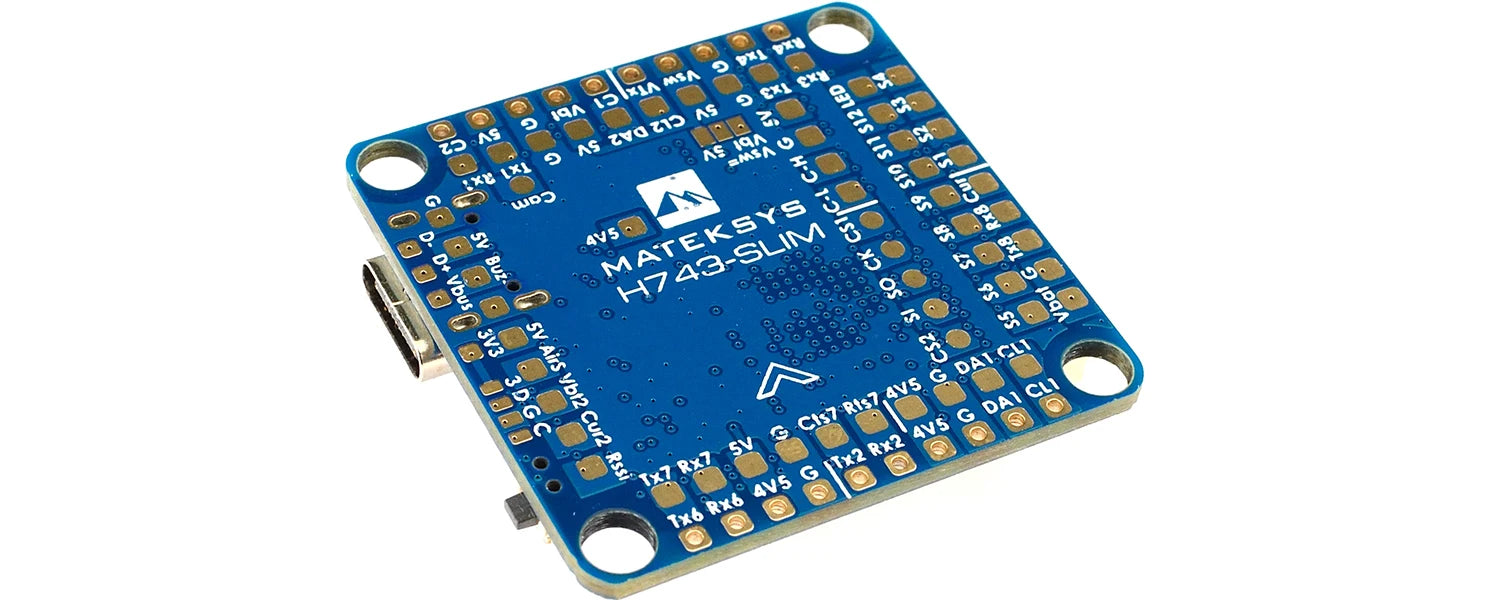
माउंटिंग: 30.5 x 30.5 मिमी, Φ4 मिमी ग्रोमेट्स के साथ Φ3 मिमी
-
आयाम: 36 x 36 x 5 मिमी
-
वजन: 7g
सहित
-
1x H743-स्लिम
-
6x सिलिकॉन ग्रोमेट्स M4 से M3
-
1x JST-SH1.0_8pin केबल, 5cm
-
2x JST-SH1.0_8पिन कनेक्टर
-
CAN पोर्ट के लिए 1x JST-GH-4P से JST-GH-4P केबल, 20cm

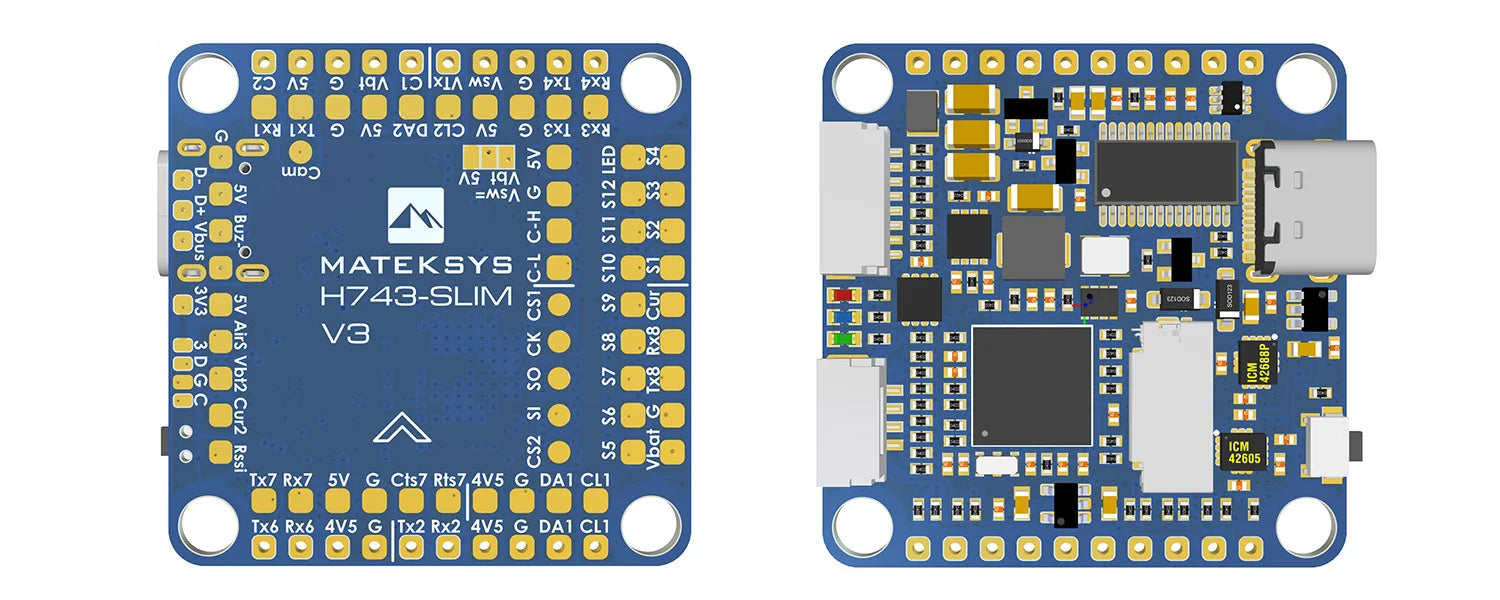
H743-स्लिम V3 में नया क्या है
-
MPU6000+ICM42605 के बजाय ICM42688-P+ICM42605
-
अन्य फ़ंक्शन, लेआउट और घटक पिछले बोर्ड संस्करण के समान हैं।
-
H743-स्लिम V3 में betaflight_4.3 है।QC
के लिए 0 प्रीलोडेड
ArduPilot
-
ICM42688-P के साथ H743-मिनी-V3 ArduPilot 4.2 या उच्चतर द्वारा समर्थित है,
-
ICM42688-P को पहले IMU (IMU0) के रूप में परिभाषित किया गया है, ICM42605 को दूसरा (IMU1) है।
-
ArduPilot 4.2 के साथ, INS_ENABLE_MASK को 7 या डिफ़ॉल्ट 127 पर सेट करें।
-
एमसीयू को मिटाने और फर्मवेयर अपलोड करने के लिए STM32CubeProgrammer का उपयोग करने की अनुशंसा की जाती है। इस ब्लॉग को जांचें http://www.mateksys.com/?p=6905
INAV
-
H743-स्लिम-V3 कॉन्फिगरेटर से डाउनलोड किए गए INAV4.1 द्वारा समर्थित नहीं है। कृपया हमारी वेबसाइट से inav_4.1.0_MATEKH743_42688 डाउनलोड करें।
-
INAV5.0 से प्रारंभ करते हुए, V1/V1.5/V3 समान फर्मवेयर साझा करेगा।
बीटाफ्लाइट
-
IMU ICM42688-p BetaFlight 4.3 या उच्चतर द्वारा समर्थित है।
-
icm42688-p पहला IMU (डिफ़ॉल्ट) है, ICM42605 दूसरा IMU है।
-
BetaFlight 4.2.x सूची में लक्ष्य MATEKH743 ICM426XX श्रृंखला का समर्थन नहीं करता है, आपको इसे BF4.3_RC या नवीनतम के साथ फ्लैश करना होगा
Related Collections