


MATEKSYS H7A3-SLIM फ्लाइट कंट्रोलर - ICM42688P - 30x30
MATEKSYS H7A3-SLIM फ्लाइट कंट्रोलर - ICM42688P - 30x30
MATEKSYS
पिकअप उपलब्धता लोड नहीं की जा सकी
MATEKSYS H7A3-SLIM फ्लाइट कंट्रोलर 30x30 मिमी के कॉम्पैक्ट डिज़ाइन में उच्च प्रदर्शन प्रदान करता है। इसमें STM32H7A3RIT6 MCU, 280MHz Cortex-M7 प्रोसेसर, 1.4MB RAM, और 2MB फ्लैश शामिल हैं। ICM42688P IMU, SPL06-001 बैरोमीटर, AT7456E OSD, और 128MB फ्लैश ब्लैकबॉक्स के साथ, यह सटीक डेटा और पर्याप्त लॉगिंग प्रदान करता है। कंट्रोलर में 6 UARTs, 11 PWM आउटपुट, 1 I2C, 1 CAN पोर्ट, और 4 ADC चैनल शामिल हैं। इसमें तीन स्थिति LEDs, एक USB टाइप-C पोर्ट, और एक स्विचेबल 9V आउटपुट भी है। 30.5 x 30.5 मिमी माउंटिंग पैटर्न, 4 मिमी छिद्र, 3 मिमी ग्रॉमेट्स के साथ, और केवल 7 ग्राम वजन के साथ, यह FPV रेसिंग और फ्रीस्टाइल उड़ान के लिए एकदम सही है। कस्टम इंटीग्रेशन के लिए एक 3D स्टेप फ़ाइल शामिल है।
विशेषताएँ
- ऑन-स्क्रीन डिस्प्ले
- 30x30 माउंटिंग
- संक्षिप्त डिज़ाइन
- कनेक्टिविटी
- हल्का वजन
विशिष्टताएँ
विशिष्टताएँ
- MCU: STM32H7A3RIT6, 280MHz Cortex-M7, 1.4MB RAM, 2MB फ्लैश
- IMU: ICM42688P
- बारो: SPL06-001
- OSD: AT7456E
- ब्लैकबॉक्स: 128MB फ्लैश (1G-बिट NAND)
- 6x Uarts (1,2,3,4, 5, 6) अंतर्निर्मित इनवर्जन के साथ।
- 11x PWM आउटपुट
- 1x I2C
- 1x CAN
- 4x ADC (VBAT, करंट, VB2, Cur2)
- FC STATUS के लिए 3x LEDs (नीला, लाल) और 3.3V संकेतक(लाल)
- USB टाइप-C(USB2.0)
- 2x 4in1 ESC के लिए 2x JST-SH1.0_8pin कनेक्टर पर 8x PWM आउटपुट
- 1x JST-GH1.25_4pin कनेक्टर (5V/CAN-H/CAN-L/G)
- 9V आउटपुट ON/OFF स्विचेबल
- डिजिटल वीडियो OSD किसी भी फ्री UART द्वारा समर्थित है
पावर
- Vbat इनपुट: 6~36V (2~8S LiPo)
- BEC: 5V 2A निरंतर (अधिकतम 3A)
- BEC: 9V 2A निरंतर (अधिकतम 3A)
- LDO 3.3V: अधिकतम 200mA
- कोई करंट सेंसर अंतर्निहित नहीं है
- ADC VB2 पैड अधिकतम 69V का समर्थन करता है (वोल्टेज डिवाइडर: 1K:20K)
FC फर्मवेयर
- ArduPilot: MATEKH7A3 (4.6 या नए)
- ArduPlane https://firmware.ardupilot.org/Plane/beta/MatekH7A3/
- ArduCopter &https://firmware.ardupilot.org/Copter/beta/MatekH7A3/
- STM32CubeProgrammer के साथ फ्लैशिंग
भौतिक
- माउंटिंग: 30.5 x 30.5 मिमी, Φ4 मिमी गॉमेट्स के साथ Φ3 मिमी
- आयाम: 36 x 36 x 5 मिमी
- वजन: 7 ग्राम
- 3D स्टेप H7A3-SLIM_step.zip
शामिल
- 1x H7A3-SLIM
- 6x सिलिकॉन गॉमेट्स M4 से M3
- 2x JST-SH1.0_8पिन केबल, 5सेमी, & 8पिन कनेक्टर्स
- 1x JST-GH-4P से JST-GH-4P केबल CAN पोर्ट के लिए, 20सेमी
विवरण

MATEKSYS H7A3-SLIM उड़ान नियंत्रक STM32H7A3 MCU के साथ ICM42688P IMU और 30.5 मिमी माउंटिंग पैटर्न में USB-C पोर्ट का उपयोग करता है।

MATEKSYS H7A3-SLIM उड़ान नियंत्रक एक कॉम्पैक्ट 30x30 लेआउट का उपयोग करता है जिसमें USB-C पोर्ट और साफ-सुथरे वायरिंग के लिए स्पष्ट रूप से लेबल किए गए पैड हैं।

MATEKSYS H7A3-SLIM डुअल JST-SH 1.0 8-पिन कनेक्टर्स के साथ-साथ एक JST-GH 4-पिन पोर्ट और साफ-सुथरी वायरिंग और आसान सेटअप के लिए USB टाइप-C का उपयोग करता है।

MATEKSYS H7A3-SLIM कैमरा/VTx वीडियो, UARTs, CAN, और पावर कनेक्शनों के लिए स्पष्ट रूप से लेबल किए गए सोल्डर पैड और पोर्ट का उपयोग करता है।
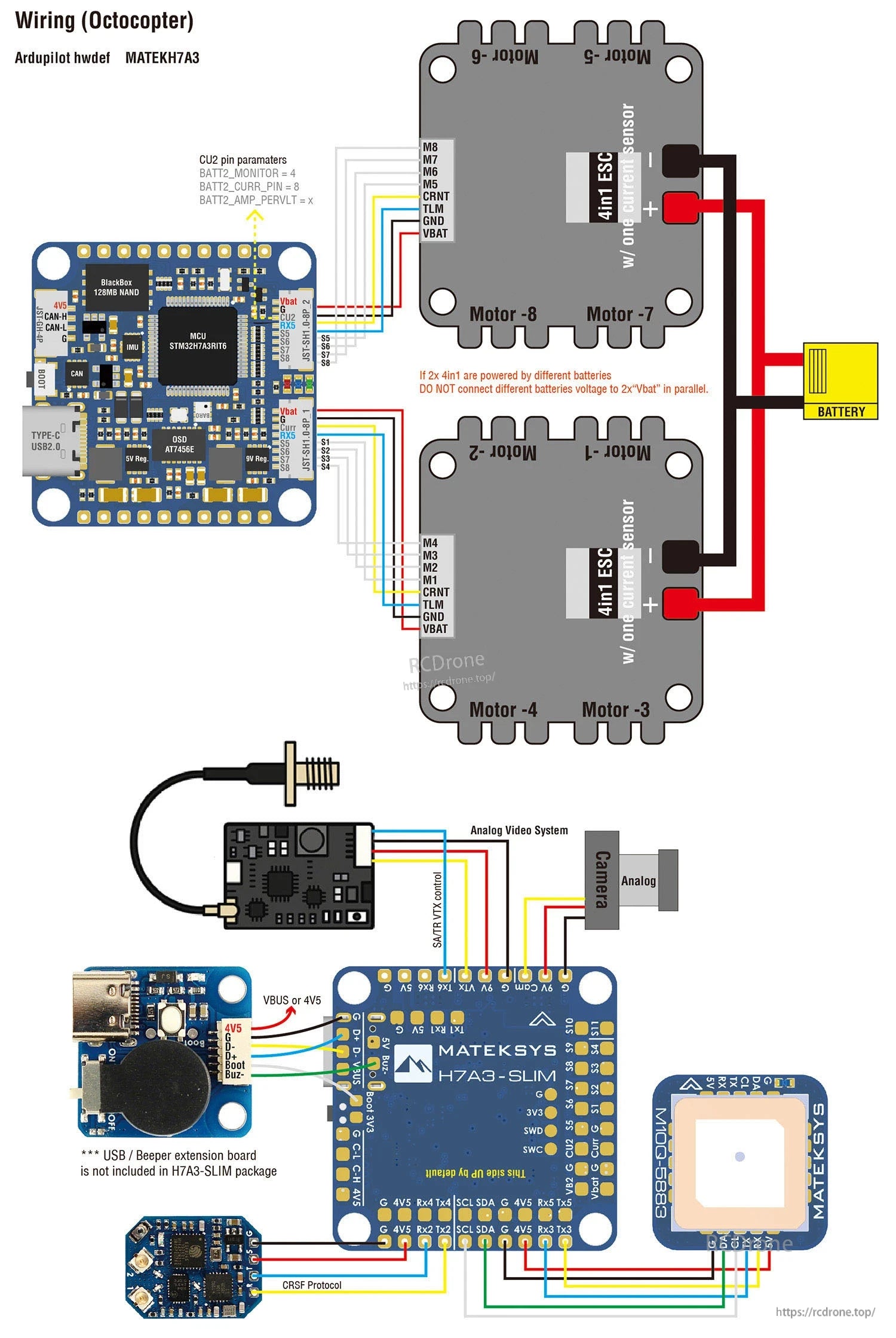
MATEKSYS H7A3-SLIM स्पष्ट रूप से लेबल किए गए पैड का उपयोग करता है जो डुअल 4-इन-1 ESCs, VBAT पावर, GPS, रिसीवर, और एनालॉग वीडियो घटकों को जोड़ने के लिए हैं।

ArduPilot मानचित्रण
| ArduPilot | ||||||
| PWM | S1 | PWM1 GPIO50 | 5 V सहिष्णु I/O | TIM1_CH2 | DMA/Bi-DShot | Group1 |
| S2 | PWM2 GPIO51 | 5 V सहिष्णु I/O | TIM1_CH3 | DMA/Bi-DShot | ||
| S3 | PWM3 GPIO52 | 5 V सहिष्णु I/O | TIM2_CH1 | DMA/Bi-DShot | Group2 | |
| S4 | PWM4 GPIO53 | 5 V सहिष्णु I/O | TIM2_CH2 | DMA/Bi-DShot | ||
| S5 | PWM5 GPIO54 | 5 V सहिष्णु I/O | TIM3_CH3 | DMA/Bi-DShot | गौरप3 | |
| S6 | PWM6 GPIO55 | 5 V सहिष्णु I/O | TIM3_CH4 | DMA/Bi-DShot | ||
| S7 | PWM7 GPIO56 | 5 V सहिष्णु I/O | TIM3_CH1 | DMA/Bi-DShot | ||
| S8 | PWM8 GPIO57 | 5 V सहिष्णु I/O | TIM3_CH2 | DMA/Bi-DShot | ||
| S9 | PWM9 GPIO58 | 5 V सहिष्णु I/O | TIM4_CH1 | DMA/DShot | गौरप4 | |
| S10 | PWM10 GPIO59 | 5 V सहिष्णु I/O | TIM4_CH2 | DMA/DShot | ||
| S11 | PWM11 GPIO60 | 5 V सहिष्णु I/O | TIM16_CH1 | DMA/DShot | Group5 | |
| PWM1~PWM11 Dshot और PWM सक्षम हैं।हालांकि, आउटपुट के लिए Dshot और सामान्य PWM संचालन को समूहों में मिलाना प्रतिबंधित है, अर्थात्, एक समूह में किसी आउटपुट के लिए Dshot सक्षम करने के लिए आवश्यक है कि उस समूह में सभी आउटपुट को Dshot के रूप में कॉन्फ़िगर और उपयोग किया जाए, न कि PWM आउटपुट के रूप में। यदि सर्वो और मोटर को एक ही समूह में मिलाया गया है, तो सुनिश्चित करें कि यह समूह सर्वो विनिर्देशन के अनुसार सबसे कम PWM आवृत्ति पर चल रहा है। यानी, यदि सर्वो अधिकतम 50Hz का समर्थन करता है, तो ESC को इस समूह में 50Hz पर चलाना चाहिए। |
||||||
| PINIO | 9V स्विच | GPIO81 | RELAY1_PIN | 81 | ||
| ADC | Vbat पैड | BATT_VOLTAGE_SENS | 6~36V | BATT_VOLT_PIN BATT_VOLT_MULT |
10 21.0 |
|
| करेंट पैड | BATT_CURRENT_SENS | 0~3.3V | बैटरी_करंट_पिन बैटरी_एम्पीयर_प्रति_वोल्ट |
11 X |
||
| VB2 पैड | बैटरी2_वोल्टेज_सेंस | 0~69V | बैटरी2_वोल्ट_पिन बैटरी2_वोल्ट_गुणांक |
18 21.0 |
||
| CU2 पैड | बैटरी2_करंट_सेंस | 0~3.3V | BATT2_CURR_PIN BATT2_AMP_PERVLT |
8 X |
||
| I2C | SCL/SDA | I2C3 | 5V सहिष्णु I/O | बोर्ड पर Baro SPL06-001 | पता | 0x76 |
| डिजिटल एयरस्पीड I2C MS4525 DLVR-L10D |
ARSPD_BUS ARSPD_TYPE ARSPD_TYPE |
0 1 9 |
||||
| मैग्नेटोमीटर | COMPASS_AUTODEC | 1 | ||||
| CAN | C-H/C-L | CAN2 | 5V सहिष्णु I/O | CAN | CAN_D1_PROTOCOL CAN_P1_DRIVER |
1 1 |
जीपीएस कंपास हवा की गति सेंसर |
GPS_TYPE COMPASS_TYPEMASK ARSPD_TYPE |
9 0 8 |
| UART | USB | USB | कंसोल | SERIAL0_PROTOCOL | 2 | |
| TX1 RX1 | USART1 w/DMA | 5 V सहिष्णु I/O | टेलीमेट्री | SERIAL1_PROTOCOL | 2 | |
| TX2 RX2 | USART2 w/DMA | 5 V सहिष्णु I/O | RC इनपुट/रिसीवर | SERIAL2_PROTOCOL | 23 | |
| TX3 RX3 | USART3 w/DMA | 5 V सहिष्णु I/O | जीपीएस | सीरियल3_प्रोटोकॉल | 5 | |
| TX4 RX4 | UART4 बिना DMA | 5 V सहिष्णु I/O | स्पेयर | सीरियल4_प्रोटोकॉल | -1 | |
| TX5 RX5 | UART5 बिना DMA | 5 V सहिष्णु I/O | स्पेयर | सीरियल5_प्रोटोकॉल | -1 | |
| TX6 RX6 | USART6 बिना DMA | 5 V सहिष्णु I/O | स्पेयर | सीरियल6_प्रोटोकॉल | -1 | |
RC इनपुट
RC इनपुट USART2(सीरियल2) पर कॉन्फ़िगर किया गया है।यह सभी अनुक्रमिक RC प्रोटोकॉल का समर्थन करता है। SERIAL2_PROTOCOL=23 डिफ़ॉल्ट रूप से।
- PPM का समर्थन नहीं किया गया है।
- CRSF को Tx2 & Rx2 कनेक्शन की आवश्यकता होती है, और SERIAL2_OPTIONS को "0" (डिफ़ॉल्ट) पर सेट करें।
- SBUS/DSM/SRXL Rx2 पिन से जुड़ता है, लेकिन SBUS के लिए SERIAL2_OPTIONS को "3" पर सेट करना आवश्यक है।
- FPort को Tx2 से कनेक्शन की आवश्यकता होती है, और SERIAL2_OPTIONS को "7" पर सेट करें। यदि टेलीमेट्री काम नहीं करती है, तो सेट करने का प्रयास करें SERIAL7_OPTIONS = 135।
- SRXL2 को Tx2 से कनेक्शन की आवश्यकता होती है, और स्वचालित रूप से टेलीमेट्री प्रदान करता है। SERIAL2_OPTIONS को "4" पर सेट करें।
- ArduPilot में RC सिस्टम कनेक्शनों के लिए कोई भी UART का उपयोग किया जा सकता है, और यह PPM को छोड़कर सभी प्रोटोकॉल के साथ संगत है। विवरण के लिए देखें रेडियो नियंत्रण प्रणाली ।
ArduPilot Relay(PINIO)
- डिफ़ॉल्ट रूप से 9V आउटपुट चालू
- PC13 PINIO1 OUTPUT GPIO(81) //9V पावर switche.g.
- RELAY1_FUNCTION 1
- RELAY1_PIN 81 // PINIO1 GPIO
- RC7_OPTION 28 //Relay चालू/बंद, 9V ON/OFF सेट करने के लिए ट्रांसमीटर के CH7 का उपयोग करें
कॉन्फ़िगर की गई सुविधा तब सक्रिय होगी जब सहायक स्विच का pwm मान 1800 से अधिक हो जाएगा। जब मान 1200 से नीचे गिर जाएगा, तो इसे निष्क्रिय कर दिया जाएगा।
स्विच के उच्च और निम्न होने पर ट्रांसमीटर से भेजे गए pwm मान की जांच करें, मिशन प्लानर के प्रारंभिक सेटअप >> अनिवार्य हार्डवेयर >> रेडियो कैलिब्रेशन स्क्रीन का उपयोग करके।यदि यह 1800 से अधिक या 1200 से कम नहीं चढ़ता है, तो ट्रांसमीटर में सर्वो एंड पॉइंट्स को समायोजित करना सबसे अच्छा है।
Related Collections


