

MUWEIDU L6020 मोटर 24V 200rpm सर्वो मोटर 18-बिट एन्कोडर के साथ, RS485/CAN, 0.58N.m रेटेड टॉर्क
MUWEIDU L6020 मोटर 24V 200rpm सर्वो मोटर 18-बिट एन्कोडर के साथ, RS485/CAN, 0.58N.m रेटेड टॉर्क
MUWEIDU
पिकअप उपलब्धता लोड नहीं की जा सकी
अवलोकन
MUWEIDU L6020 मोटर एक कम गति, उच्च सटीकता वाली ब्रशलेस DC सर्वो मोटर है जिसे गति/स्थिति नियंत्रण के लिए डिज़ाइन किया गया है। इसमें 18-बिट एकल-टर्न एब्सोल्यूट एन्कोडर एकीकृत है और यह स्थिर, सुचारू संचालन की आवश्यकता वाले रोबोटिक्स और स्वचालन प्रणालियों के लिए CAN या RS485 संचार का समर्थन करता है। उत्पाद चयन या तकनीकी सहायता के लिए, संपर्क करें [email protected] or देखें https://rcdrone.top/.
मुख्य विशेषताएँ
- कम गति & उच्च-परिशुद्धता ब्रशलेस डीसी मोटर श्रृंखला
- हॉलो-शाफ्ट डिज़ाइन
- स्थिर & चिकनी संचालन
- एकीकृत उच्च परिशुद्धता; हल्का निर्माण; उच्च टॉर्क प्रदर्शन
- कम गति और उच्च-परिशुद्धता स्थिति नियंत्रण की आवश्यकताओं को पूरा करता है
- मोटर कोर सामग्री: प्रीमियम सिलिकॉन स्टील शीट और उच्च तापमान प्रतिरोधी उच्च-प्रदर्शन स्थायी मैग्नेट
- बाहरी रोटर मल्टी-स्टेज फ्लैटेन डिज़ाइन, स्थान-सीमित अनुप्रयोगों में उच्च टॉर्क के लिए
- ब्रशलेस संरचना उच्च-प्रदर्शन बेयरिंग के साथ मिलकर चिकनी घूर्णन और लंबे सेवा जीवन के लिए
- सटीक वर्तमान सैंपलिंग और नियंत्रण के लिए उच्च-परिशुद्धता, कम-तापमान-ड्रिफ्ट मिश्र धातु प्रतिरोधक
- पूर्ण एन-चैनल तीन-चरण पूर्ण-ब्रिज ड्राइव, कम आंतरिक प्रतिरोध और उच्च वर्तमान आउटपुट के साथ
- टॉर्क ओपन-लूप, स्पीड, और पोजीशन कंट्रोल मोड्स के बीच निर्बाध स्विचिंग का समर्थन करता है
- मुख्य नियंत्रण: 72 मेगाहर्ट्ज ऑपरेटिंग फ़्रीक्वेंसी के साथ 32-बिट MCU
- इनपुट वोल्टेज: 12~60 V (ड्राइव)
- एक बार कैलिब्रेशन, शून्य स्थिति कभी नहीं खोई
- CE प्रमाणित (जैसा कि कहा गया है)
विशेषताएँ
| मॉडल | L6020 |
| रेटेड वोल्टेज | 24V |
| रेटेड करंट | 1.4A |
| पीक पावर | 12.6W |
| रेटेड टॉर्क | 0.58N.m |
| पीक टॉर्क | 1.4N. |
| रेटेड स्पीड | 200rpm |
| एन्कोडर | 18बिट |
| रोटर जड़ता | 394gcm² |
| मोटर तापमान निगरानी | हाँ |
| नियंत्रण मोड | स्पीड/पोजीशन |
| संचार प्रोटोकॉल | RS485 या CAN |
| कुल आयाम | Φ58mm×21mm |
| वजन | 185g |
इंटरफेस परिभाषा
- ID स्विच
- CAN/RS485
- B/L: RS485-B या CAN-L
- A/H: RS485-A या CAN-H
- V-: नकारात्मक पावर सप्लाई
- V+: सकारात्मक पावर सप्लाई
- T: UART ट्रांसमीटर
- R: UART रिसीवर
- G: सिग्नल GND
अनुप्रयोग परिदृश्य
- ह्यूमनॉइड रोबोट
- रोबोटिक आर्म्स
- एक्सोस्केलेटन
- क्वाड्रुपेड रोबोट
- एजीवी वाहन
- एआरयू रोबोट
- 360° कैमरा
- हैंडहेल्ड कैमरा
- लिडार
- गिम्बल
पीसी सॉफ़्टवेयर / नियंत्रण मोड (जैसा कि उल्लेखित है)
पीसी-आधारित पैरामीटर ट्यूनिंग / परीक्षण / फर्मवेयर अपग्रेड उपलब्ध है।ओपन-सोर्स विकास प्लेटफार्मों के साथ संगत, जिसमें पीसी, एमसीयू, पीएलसी, औद्योगिक कंप्यूटर और रास्पबेरी पाई शामिल हैं।
- टॉर्क मोड
- स्पीड मोड
- मल्टी-टर्न कंट्रोल मोड
- सिंगल-टर्न पोजीशन + डायरेक्शन मोड
- इंक्रीमेंटल पोजीशन मोड
- मल्टी-टर्न कंट्रोल मोड (स्पीड लिमिट के साथ)
- सिंगल-टर्न पोजीशन + डायरेक्शन मोड (स्पीड लिमिट के साथ)
- इंक्रीमेंटल पोजीशन मोड (स्पीड लिमिट के साथ)
हस्तनिर्देश / फ़ाइलें
विवरण

कम गति, उच्च सटीकता गति नियंत्रण के लिए डिज़ाइन किया गया है, जिसमें एक कॉम्पैक्ट होलो-शाफ्ट फॉर्म फैक्टर है।

मुख्य निर्माण पर चिकनी घूर्णन और स्थिर स्थिति प्रदर्शन के लिए सटीक वर्तमान नियंत्रण पर ध्यान केंद्रित किया गया है।
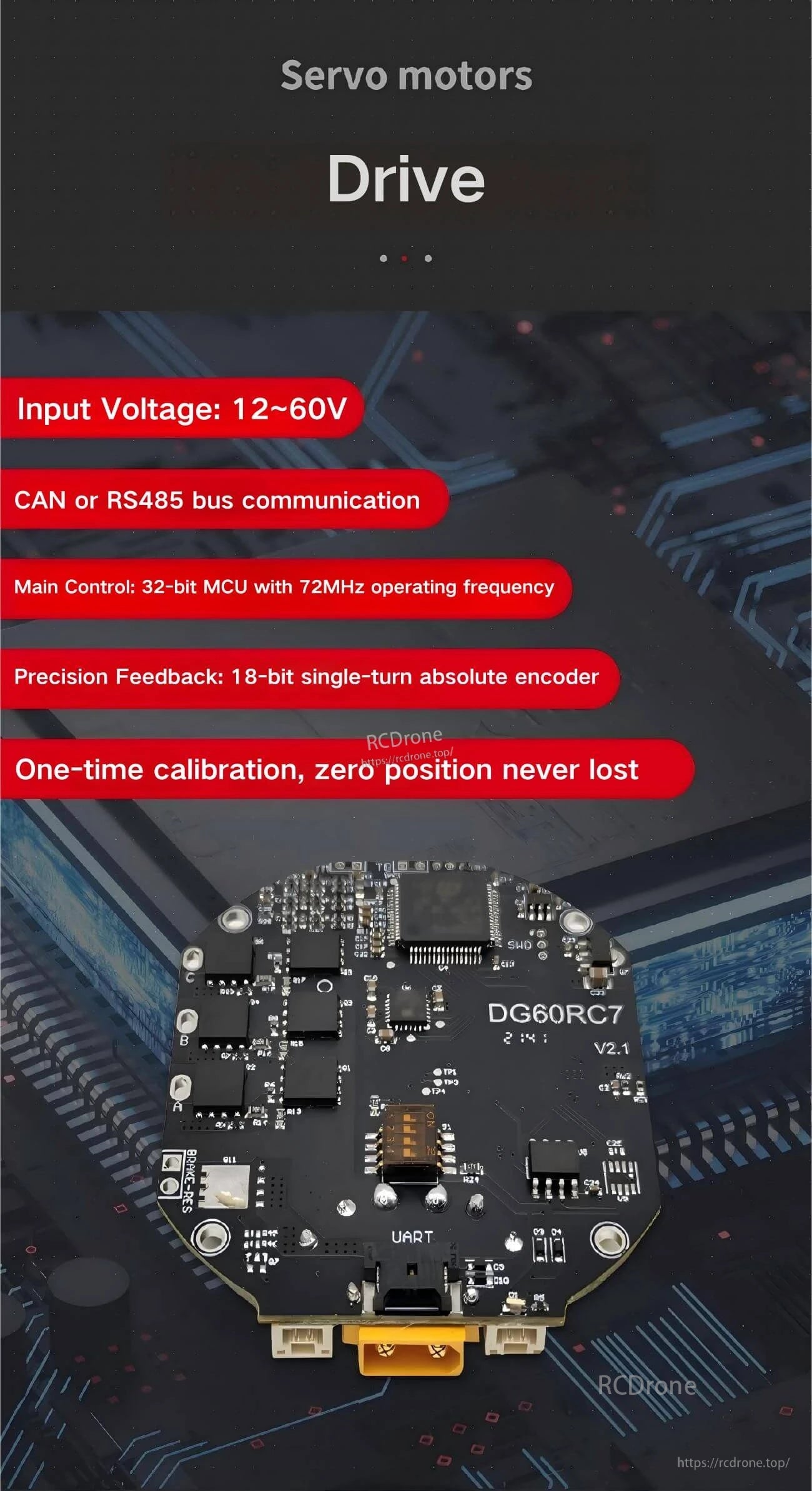
बिल्ट-इन ड्राइव इलेक्ट्रॉनिक्स CAN या RS485 बस नियंत्रण का समर्थन करते हैं जिसमें 18-बिट एब्सोल्यूट एन्कोडर फीडबैक होता है।

स्पष्ट इंटरफेस लेबलिंग पावर, UART, और CAN/RS485 कनेक्शनों को सही तरीके से वायर करने में मदद करती है।
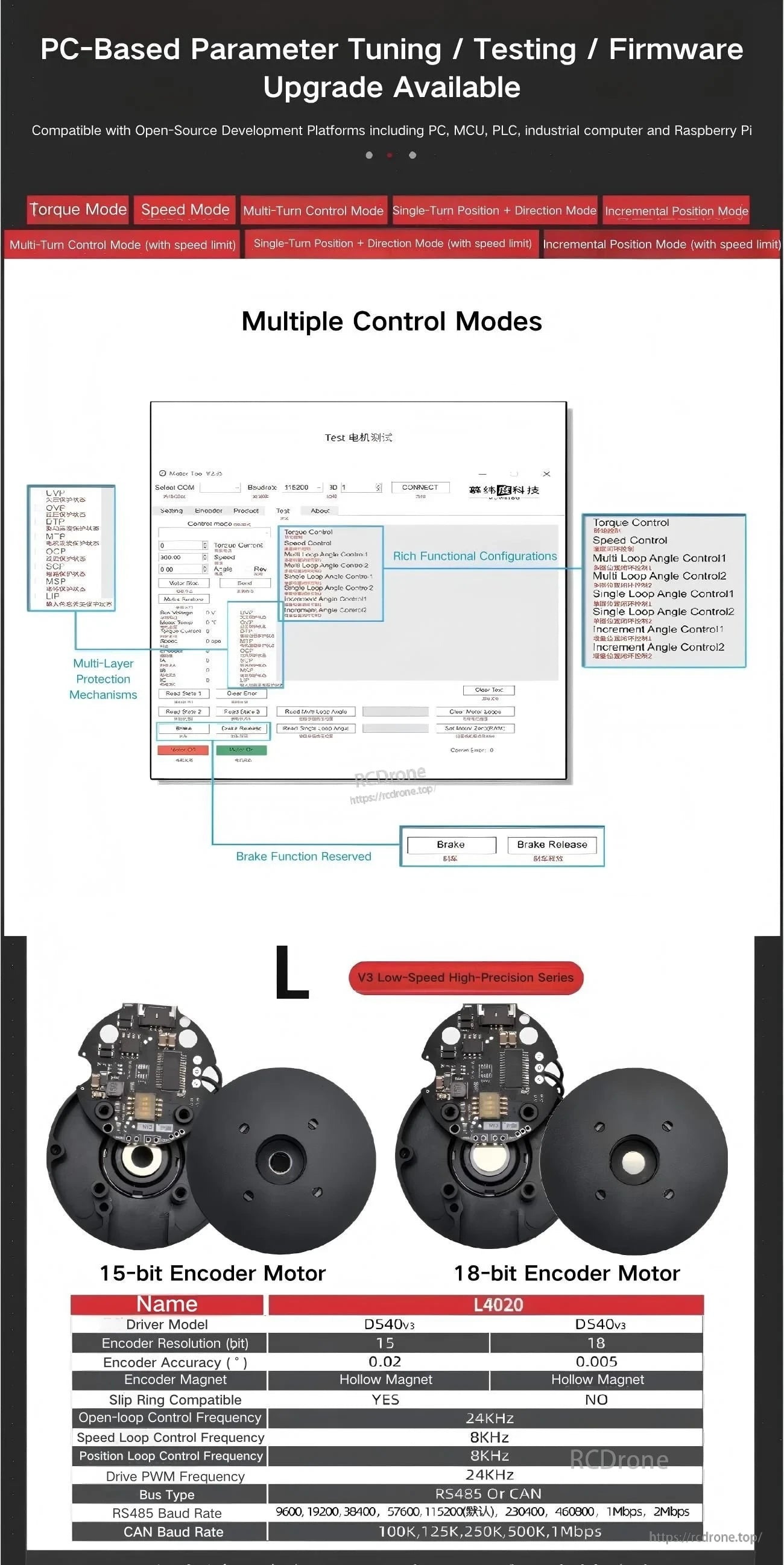
पीसी सॉफ़्टवेयर टॉर्क, गति, और स्थिति नियंत्रण मोड में पैरामीटर ट्यूनिंग, परीक्षण, और फर्मवेयर अपग्रेड की अनुमति देता है।
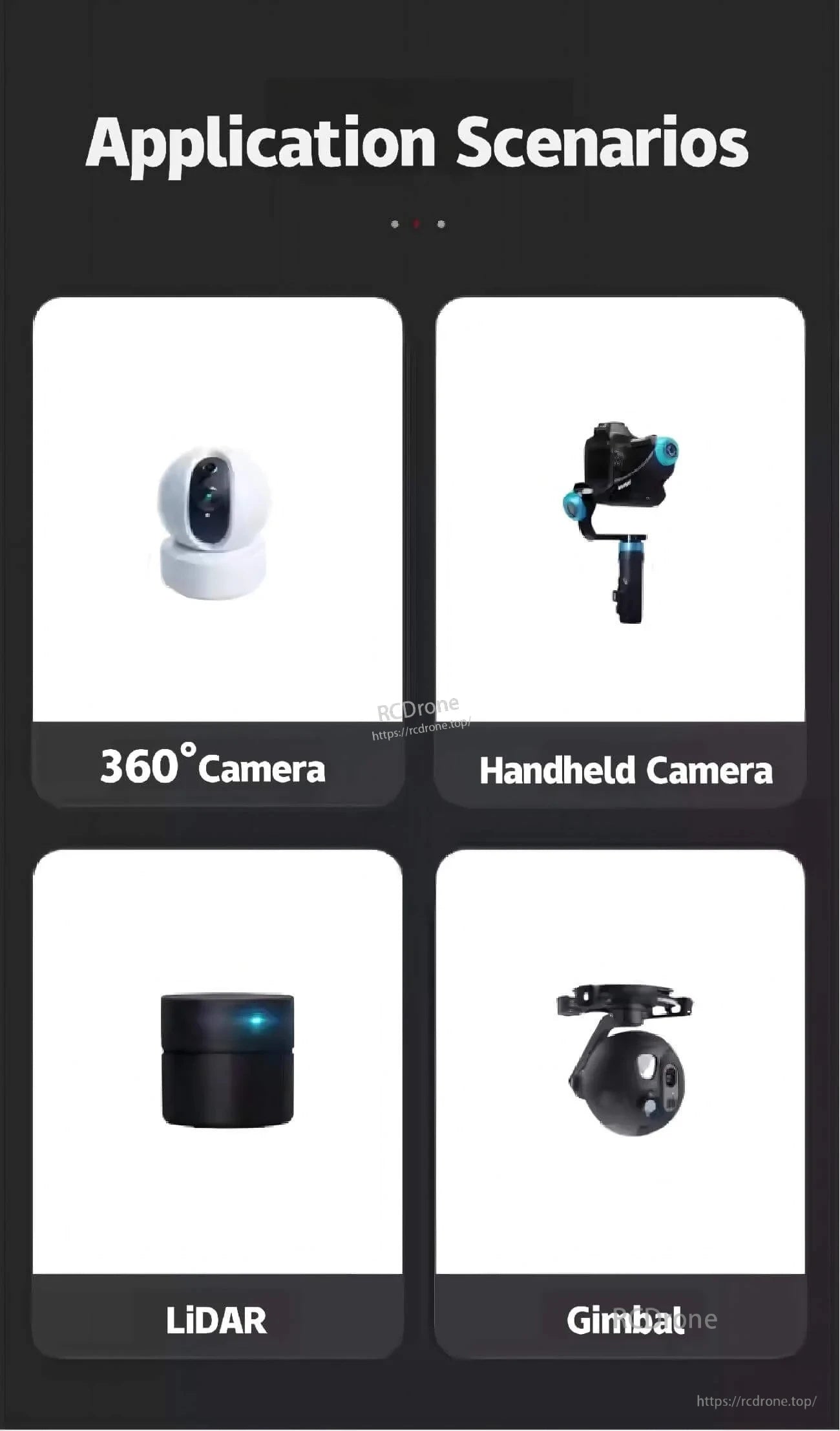
गिम्बल, 360° कैमरे, और LiDAR मॉड्यूल जैसे कॉम्पैक्ट मेकाट्रॉनिक्स निर्माण के लिए एक व्यावहारिक फिट।
Related Collections

