







MyActuator RH-17 खोखला हार्मोनिक रोबोट जॉइंट मोटर – 54N·m पीक टॉर्क, 100:1 गियर अनुपात, EtherCAT और CAN BUS, ड्यूल ABS-17BIT एन्कोडर
MyActuator RH-17 खोखला हार्मोनिक रोबोट जॉइंट मोटर – 54N·m पीक टॉर्क, 100:1 गियर अनुपात, EtherCAT और CAN BUS, ड्यूल ABS-17BIT एन्कोडर
MyActuator
पिकअप उपलब्धता लोड नहीं की जा सकी
Overview
MyActuator RH-17 Hollow Harmonic Robot Joint Motor एक उच्च प्रदर्शन वाला एक्ट्यूएटर है जिसे उन्नत रोबोटिक अनुप्रयोगों के लिए डिज़ाइन किया गया है। इसके साथ 100:1 गियर अनुपात, 54 N·m पीक टॉर्क, और 35 N·m रेटेड टॉर्क है, जो सटीक, स्थिर और शक्तिशाली संचालन सुनिश्चित करता है। इसमें EtherCAT और CAN BUS संचार, एक डुअल ABS-17BIT एन्कोडर प्रणाली, और क्रॉस्ड रोलर बेयरिंग शामिल हैं, जो इस मोटर को असाधारण नियंत्रण सटीकता और स्थायित्व प्रदान करता है। इसका संक्षिप्त खोखला डिज़ाइन (Ø80 मिमी × 90.2 मिमी) और 1.11 किलोग्राम वजन इसे रोबोटिक हाथों, सहयोगी रोबोटों, और स्वचालन प्रणालियों के लिए आदर्श बनाता है, जिन्हें उच्च टॉर्क घनत्व और सटीक गति नियंत्रण की आवश्यकता होती है।
मुख्य विशेषताएँ
-
उच्च टॉर्क और शक्ति: मांग वाले अनुप्रयोगों के लिए 35 N·m का रेटेड टॉर्क और 54 N·m का पीक टॉर्क।
-
डुअल संचार: EtherCAT और CAN BUS प्रोटोकॉल का समर्थन करता है, जिससे निर्बाध एकीकरण और तेज प्रतिक्रिया मिलती है।
-
सटीक नियंत्रण: डुअल ABS-17BIT एन्कोडर्स इनपुट और आउटपुट के लिए सटीक स्थिति प्रदान करते हैं, जिसमें <0.01° पुनरावृत्ति है।
-
संक्षिप्त और हल्का: खोखले शाफ्ट डिज़ाइन केवल 1.11 किलोग्राम वजन के साथ, उच्च टॉर्क घनत्व के लिए अनुकूलित।
-
मजबूत निर्माण: बढ़ी हुई लोड क्षमता और स्थायित्व के लिए क्रॉस्ड रोलर बेयरिंग से सुसज्जित।
-
औद्योगिक-ग्रेड विश्वसनीयता: इंसुलेशन ग्रेड F, उच्च गति MCU, और स्थिर दीर्घकालिक प्रदर्शन के लिए अनुकूलित गर्मी अपव्यय।
उत्पाद पैरामीटर
| पैरामीटर | मान |
|---|---|
| गियर अनुपात | 100:1 |
| इनपुट वोल्टेज | 48 V |
| नो लोड स्पीड | 30 RPM |
| नो लोड करंट | 0.6 A |
| रेटेड स्पीड | 25 RPM |
| रेटेड टॉर्क | 35 N·m |
| रेटेड पावर | 91 W |
| रेटेड करंट | 4.7 A (rms) |
| पीक टॉर्क | 54 N·m |
| पीक करंट | 7.4 A (rms) |
| बैक-ईएमएफ स्थिरांक | 19.2 Vdc/Krpm |
| मॉड्यूल टॉर्क स्थिरांक | 7.4 N·m/A |
| मोटर फेज प्रतिरोध | 0.70 Ω |
| मोटर फेज इंडक्टेंस | 0.47 mH |
| पोल जोड़े | 10 |
| बैकलैश | <40 आर्कसेक |
| रेडियल लोड | स्थैतिक: 16.3 kN / गतिशील: 10.4 kN |
| एक्सियल लोड | स्थैतिक: 78.2 kN / गतिशील: 20.8 kN |
| जड़ता | N: 0.52 kg·m² / B: 0.56 kg·m² |
| पुनरावृत्ति स्थिति सटीकता | <0.01° |
| संचार | CAN BUS & EtherCAT |
| वजन | नेट: 1.11 किलोग्राम / पैक्ड: 1.28 किलोग्राम |
| इंसुलेशन ग्रेड | F |
एन्कोडर प्रकार
-
इनपुट एन्कोडर: ABS-17BIT
-
आउटपुट एन्कोडर: ABS-17BIT
-
सटीक गति फीडबैक प्रदान करता है जिससे नियंत्रण सटीकता में सुधार होता है।
स्थापना & आयाम
-
आकार: Ø80 मिमी × 90.2 मिमी
-
माउंटिंग: सुरक्षित स्थापना के लिए कई थ्रू-होल और थ्रेडेड इंटरफेस।
-
हॉलो शाफ्ट: रोबोटिक आर्म और ऑटोमेशन सिस्टम में केबल रूटिंग के लिए अनुकूलित।
इंटरफेस और वायरिंग
-
ईथरकैट पोर्ट: नेटवर्क श्रृंखला के लिए IN और OUT टर्मिनल।
-
CAN BUS पोर्ट: संचार के लिए CAN_H और CAN_L।
-
पावर टर्मिनल: विश्वसनीय पावर डिलीवरी के लिए XT30 कनेक्टर्स।
-
सहायक कनेक्शन: उन्नत नियंत्रण सेटअप के लिए मेमोरी बैटरी और ब्लीडर रेसिस्टर इंटरफेस।
पैकेज सामग्री
-
एक्चुएटर: MyActuator RH-17 हॉलो हार्मोनिक जॉइंट मोटर ×1
-
A. पावर सप्लाई केबल ×2
-
B. CAN BUS संचार केबल ×4
-
C. 120Ω टर्मिनल प्रतिरोध ×1
-
D. ईथरकैट संचार केबल ×2
-
E. CAN BUS संचार मॉड्यूल ×1 (प्रत्येक आदेश पर मुफ्त USB-CAN एडाप्टर शामिल)
अनुप्रयोग
-
सहयोगात्मक रोबोटिक हाथ
-
औद्योगिक स्वचालन प्रणाली
-
मानवाकार और चौपायें रोबोट
-
सटीक गति प्लेटफार्म
-
अनुसंधान और विकास के लिए स्वायत्त रोबोटिक जोड़ों
विवरण

रोबोट मोटर RH-17 डुअल एन्कोडर, CAN BUS & ईथरकैट, 100:1 गियर अनुपात, 48V, 35 N.m टॉर्क, 91W पावर प्रदान करता है। ब्रेक के साथ/बिना उपलब्ध है। इसमें चित्र और पैरामीटर शामिल हैं।
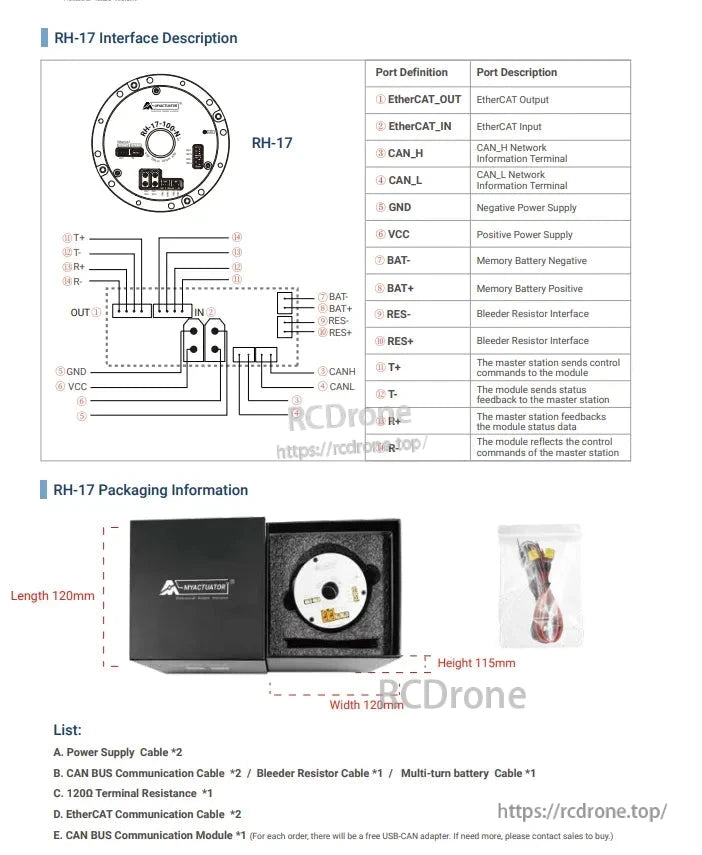
RH-17 इंटरफेस में EtherCAT, CAN बस, पावर, और बैटरी कनेक्शन शामिल हैं। पैकेजिंग में केबल, प्रतिरोधक, और एक मॉड्यूल शामिल हैं। आयाम: 120×120×115 मिमी। सूची में पावर, CAN, EtherCAT केबल, प्रतिरोध, और संचार मॉड्यूल शामिल हैं।
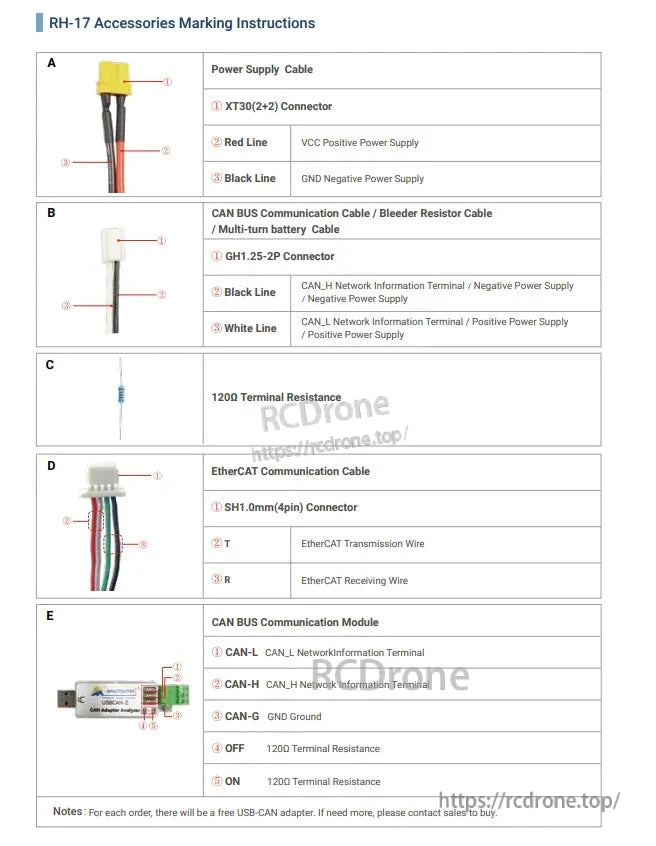
RH-17 सहायक उपकरण में पावर, CAN BUS, EtherCAT केबल, 120Ω प्रतिरोध, और संचार मॉड्यूल शामिल हैं। विवरण में प्रत्येक घटक के लिए कनेक्टर्स, तारों के रंग, कार्य, और टर्मिनल प्रतिरोध शामिल हैं। ऑर्डर के साथ USB-CAN एडेप्टर शामिल है।
Related Collections







