






MyActuator RMD-X4-10 प्लैनेटरी एक्चुएटर 10N·m ड्यूल एन्कोडर EtherCAT+CAN रोबोट जॉइंट ड्राइव
MyActuator RMD-X4-10 प्लैनेटरी एक्चुएटर 10N·m ड्यूल एन्कोडर EtherCAT+CAN रोबोट जॉइंट ड्राइव
MyActuator
पिकअप उपलब्धता लोड नहीं की जा सकी
Overview
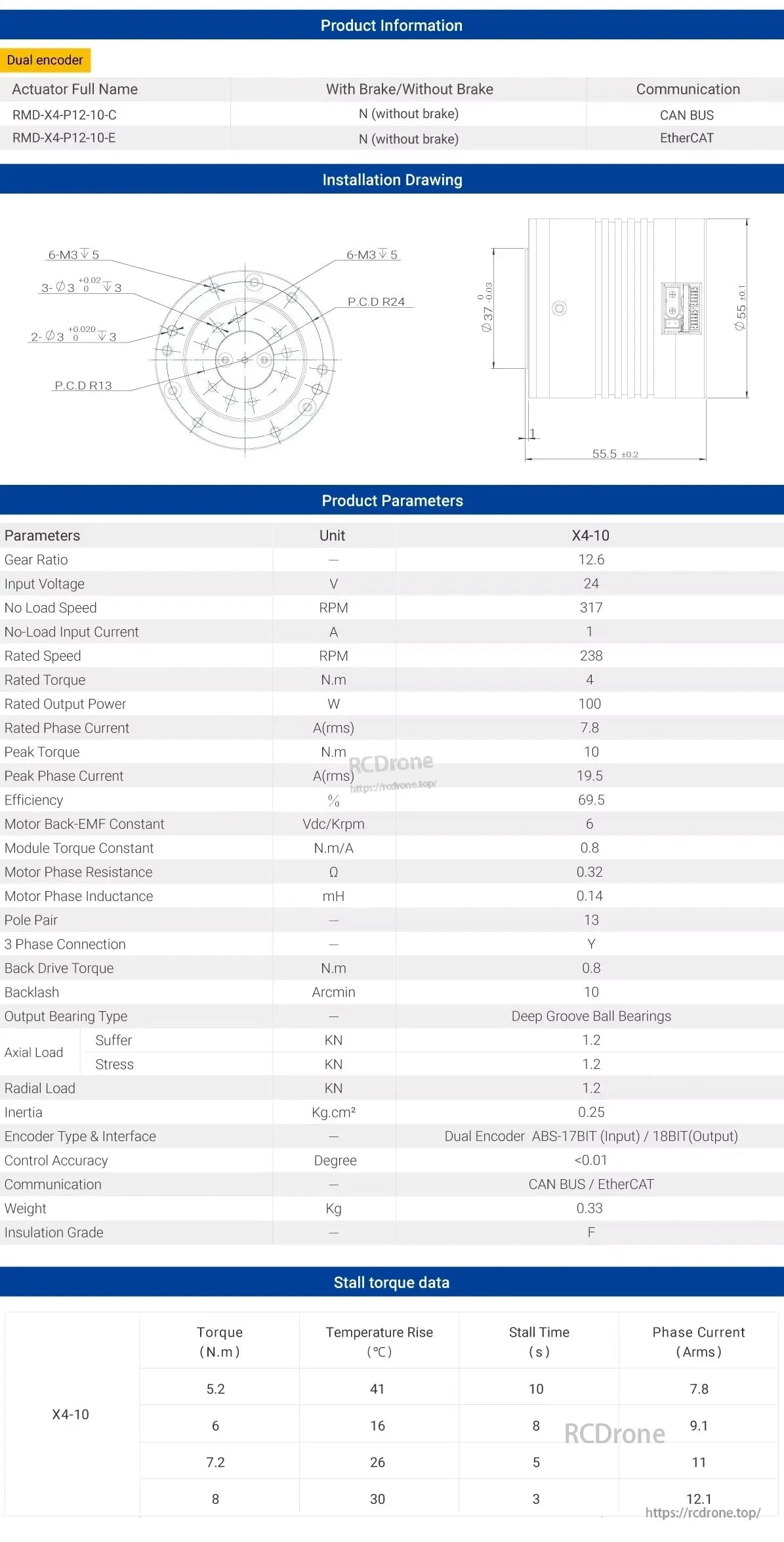
MyActuator RMD-X4-10 ग्रहणीय एक्ट्यूएटर एक उच्च-प्रदर्शन DC मोटर संयुक्त मॉड्यूल है जिसे उन्नत रोबोटिक अनुप्रयोगों के लिए डिज़ाइन किया गया है। इसमें 12.6:1 ग्रहणीय गियर अनुपात, 10N·m पीक टॉर्क, और 100W रेटेड आउटपुट पावर शामिल है, जो एक डुअल एन्कोडर सिस्टम (17-बिट इनपुट / 18-बिट आउटपुट) को एकीकृत करता है जो 0.01° सटीकता नियंत्रण प्रदान करता है। इसकी विशाल खोखली संरचना मल्टी-सेंसर एकीकरण का समर्थन करती है, जिससे मानवाकार रोबोट में पूर्ण-शरीर मुद्रा नियंत्रण के लिए एक केंद्रीय हब सक्षम होता है। EtherCAT और CAN डुअल-प्रोटोकॉल संचार के साथ, एक्ट्यूएटर 250μs अल्ट्रा-फास्ट प्रतिक्रिया प्राप्त करता है, जो इसे मानवाकार रोबोट, बायोनिक पैर ड्राइव और औद्योगिक स्वचालन जैसे उच्च-गति, उच्च-विश्वसनीयता परिदृश्यों के लिए आदर्श बनाता है।
मुख्य विशेषताएँ
-
उच्च सटीकता डुअल एन्कोडर: 17-बिट इनपुट / 18-बिट आउटपुट के साथ 0.01° सटीकता
-
पीक टॉर्क 10N·m 12.6:1 ग्रह गियर अनुपात
-
क्रॉस्ड रोलर बेयरिंग: स्थिर रोबोटिक जोड़ों के लिए असाधारण एंटी-बेंडिंग मोमेंट क्षमता
-
ईथरकैट + कैन बस डुअल कम्युनिकेशन: मल्टी-मशीन लिंकज का समर्थन करता है, अल्ट्रा-फास्ट 250μs प्रतिक्रिया
-
बड़ा खोखला ढांचा: जटिल रोबोटिक सिस्टम के लिए सेंसर, केबल और स्लिप-रिंग्स का एकीकरण सक्षम करता है
-
उच्च विश्वसनीयता: मानवाकार गेट नियंत्रण के लिए डिज़ाइन किया गया, दौड़ने, कूदने और जटिल गति के लिए सुचारू संक्रमण
-
संक्षिप्त और हल्का: Φ55mm × 55.5mm, वजन 0.33kg
विशेषताएँ
| पैरामीटर | मान |
|---|---|
| मॉडल | RMD-X4-10 |
| गियर अनुपात | 12.6:1 |
| इनपुट वोल्टेज | 24V DC |
| रेटेड स्पीड | 238 RPM |
| नो-लोड स्पीड | 317 RPM |
| रेटेड आउटपुट पावर | 100W |
| रेटेड टॉर्क | 4N·m |
| पीक टॉर्क | 10N·m |
| रेटेड करंट | 7.84A |
| नो-लोड करंट | 1A |
| एन्कोडर प्रकार | डुअल एन्कोडर (ABS-17bit / 18bit) |
| संचार | EtherCAT + CAN बस |
| वजन | 0.33kg |
| आकार | Ø55mm × 55.5mm |
अनुप्रयोग
-
मानवाकार रोबोट – हाथों, पैरों और धड़ के लिए संयुक्त ड्राइव
-
बायोनिक लेग ड्राइव – दौड़ने और कूदने के लिए उच्च-टॉर्क के साथ एंटी-बेंडिंग डिज़ाइन
-
सहयोगात्मक रोबोट – औद्योगिक स्वचालन के लिए चिकनी गति नियंत्रण
-
एक्सोस्केलेटन – मानव-सहायक उपकरणों के लिए हल्के, उच्च-गति वाले एक्ट्यूएटर्स
-
लचीली उत्पादन लाइन – ईथरकैट उच्च-गति संचार के माध्यम से मल्टी-एक्सिस समन्वय
पैकेजिंग और सहायक उपकरण
-
पावर सप्लाई + CAN बस संचार केबल ×1
-
120Ω टर्मिनल प्रतिरोध ×1
ईथरकैट संचार केबल ×2
-
सीएएन बस संचार मॉड्यूल ×1 (USB-CAN एडेप्टर प्रत्येक आदेश के साथ शामिल)
पैकेजिंग आयाम: 100 मिमी × 100 मिमी × 70 मिमी
विवरण

आरएमडी-एक्स4-पीटी2.5-10-C डुअल एन्कोडर रोबोट जॉइंट ड्राइव 24V इनपुट, 12.6 गियर अनुपात, 4N·m टॉर्क, और 100W आउटपुट के साथ। इसमें CAN BUS/EtherCAT इंटरफेस, 317RPM नो-लोड स्पीड, और 0.28kg वजन की विशेषताएँ हैं। इसमें स्थापना आयाम और तकनीकी विनिर्देश शामिल हैं।

10N.m पीक टॉर्क, 12.6:1 गियर अनुपात, 0.33kg वजन के साथ ग्रहणीय एक्ट्यूएटर। आकार: Ø55mm×55.5mm। इसमें EtherCAT/CANBUS संचार, डुअल एन्कोडर, उच्च गति MCU, CAN चिप्स, और गहरे खांचे वाली बॉल बेयरिंग की विशेषताएँ हैं।

डुअल एन्कोडर ABS-17BIT इनपुट / 18BIT आउटपुट, X4-10, SN:40225621, MYACTUATOR

MYACTUATOR का RMD-X4-10 ग्रहणीय एक्ट्यूएटर 100W पावर, 46Nm टॉर्क, डुअल एन्कोडर, 238rpm स्पीड प्रदान करता है। इसमें पावर + CAN BUS केबल, 120Ω रेजिस्टर, EtherCAT केबल, CAN BUS मॉड्यूल, और मुफ्त USB-CAN एडाप्टर शामिल हैं।
RMD-X4-10 रोबोटिक ग्रहणीय एक्ट्यूएटर में डुअल एन्कोडर है, 12।6 गियर अनुपात, 24V इनपुट, 100W आउटपुट, और CAN BUS/EtherCAT। यह 4N.m टॉर्क, 238 RPM गति, 0.33kg वजन प्रदान करता है, और उच्च दक्षता के लिए डीप ग्रूव बॉल बेयरिंग का उपयोग करता है।

X4-10 इंटरफेस में पावर, CAN, और EtherCAT पोर्ट शामिल हैं। पैकेजिंग में पावर सप्लाई, केबल, रेजिस्टर्स, और मॉड्यूल शामिल हैं। आयाम: 100x100x70mm। प्रत्येक ऑर्डर के साथ USB-CAN एडाप्टर शामिल है।

X4-10 एक्सेसरीज़ में पावर सप्लाई, CAN BUS और EtherCAT केबल, टर्मिनल रेजिस्टेंस, और एक CAN BUS मॉड्यूल शामिल हैं। विवरण में कनेक्टर्स, वायर फ़ंक्शंस, सिग्नल लाइन्स, और USB-CAN एडाप्टर नोट्स शामिल हैं।
Related Collections






