Pixhawk PX4 ऑटोपायलट PIX 2.4.8 32 बिट फ्लाइट कंट्रोल - DIY RC ड्रोन मल्टीरोटर के लिए PX4FMU PX4IO सुरक्षा स्विच बजर 4G SD के साथ
Pixhawk PX4 ऑटोपायलट PIX 2.4.8 32 बिट फ्लाइट कंट्रोल - DIY RC ड्रोन मल्टीरोटर के लिए PX4FMU PX4IO सुरक्षा स्विच बजर 4G SD के साथ
RCDrone
पिकअप उपलब्धता लोड नहीं की जा सकी
Pixhawk PX4 ऑटोपायलट PIX 2.4.8 32 बिट उड़ान नियंत्रण विनिर्देश
वायरलेस संचार: वायर नियंत्रण
उपयोग: यूनिवर्सल
उत्पत्ति: मुख्यभूमि चीन

- बोर्ड PX4FMU+PX4IO के साथ एकीकृत है
- पिक्सहॉक नई 32 बिट चिप और सेंसर तकनीक के साथ है
विशेषताएं:
- उन्नत 32 बिट CortexM4 ARM उच्च प्रदर्शन प्रोसेसर, RTOS NuttX चला सकता है वास्तविक समय ऑपरेटिंग सिस्टम;
- 14* PWM/ एक्चुएटर आउटपुट;
- बस इंटरफ़ेस (UART, I2C, SPI, CAN);
- एकीकृत बैकअप बिजली आपूर्ति और विफलता बैकअप नियंत्रक, मुख्य नियंत्रक हो सकता है बैकअप नियंत्रण पर सुरक्षित रूप से स्विच किया गया;
-स्वचालित और मैनुअल मोड प्रदान करें;
-अनावश्यक पावर इनपुट और फॉल्ट ट्रांसफर फ़ंक्शन प्रदान करें;
-रंगीन एलईडी लैंप;
-मल्टी टोन बजर इंटरफ़ेस;
- उड़ान डेटा रिकॉर्ड करने के लिए माइक्रो एसडी;
प्रोसेसर:
- 32 बिट 2M फ्लैश मेमोरी STM32F427 कॉर्टेक्स M4, हार्डवेयर फ्लोटिंग पॉइंट प्रोसेसिंग यूनिट के साथ
- मुख्य आवृत्ति: 256K, 168MHZ RAM
- 32 बिट STM32F103 बैकअप सह प्रोसेसर
सेंसर:
- L3GD20 3 अक्ष डिजिटल 16 बिट जायरोस्कोप
- LSM303D 3 अक्ष 14 बिट एक्सेलेरोमीटर /मैग्नेटोमीटर
- MPU6000 6 अक्ष एक्सेलेरोमीटर / मैग्नेटोमीटर
- MS5611 उच्च परिशुद्धता बैरोमीटर
इंटरफ़ेस:
- 5* UART, 1*संगत उच्च वोल्टेज, 2*हार्डवेयर प्रवाह नियंत्रण
- 2* CAN
- DSM/DSM2/DSM-X उपग्रह रिसीवर संगत इनपुट
- Futaba SBUS संगत इनपुट और आउटपुट
- PPM सिग्नल इनपुट
- RSSI (PWM या वोल्टेज) इनपुट
- I2C
- SPI
- 3.3 और 6.6VADC इनपुट
- बाहरी USB माइक्रो इंटरफ़ेस
पैकेज में शामिल:
1 x 2.4.8 पिक्सहॉक मुख्य नियंत्रण
1 x उड़ान नियंत्रण शेल
1 x सुरक्षा स्विच
1 x बजर
1 x 6पिन से 6पिन लाइन
1 x 4पिन से 4पिन लाइन
1 x 3पिन ड्यूपॉन्ट लाइन
1 x 4G SD कार्ड


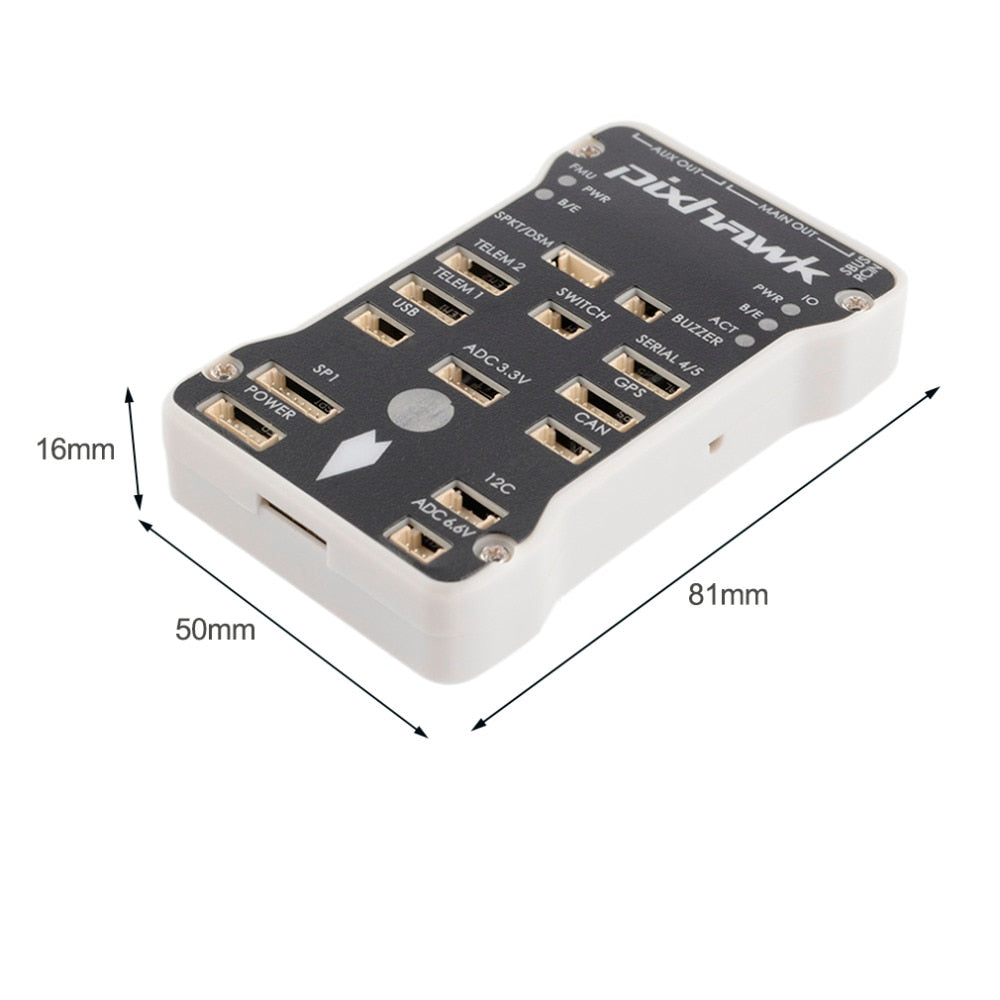
Gps CwN Mou AAut pidunwk a J SKd Jeltm > स्विच टेलू HTELLM Uso AdcJ Jv टावर मिगस Adgody एडाप्टर।


Pixhawk PX4 ऑटोपायलट सिस्टम 2.4GHz फ्लाइट कंट्रोल के साथ DIY RC ड्रोन मल्टीरोटर, 4G SD कार्ड के साथ संगत PX4FMU और PX4IO सुरक्षा स्विच बजर शामिल है। एसपीकेटी/डीएसएम बजर टेलीम 2 स्विच सीरियल 4/5टेलेम 1 जीपीएस यूएसबी एडीसी3.जेवी कैन 'एसडब्ल्यू एसपीआई 12सी पावर एडीसी 66वी केजी यूनिट टायर ओनऑफ कैपेसिटिट्सूओजीएक्सआई जी आईडीपीवी 4oo<टी3910>
Related Collections