




ROBOTERA XHAND 1 रोबोट हाथ - 12 डिग्री फ्रीडम, 270° टैक्टाइल फिंगरटिप्स, 80N ग्रिप, 25 किग्रा लिफ्ट, EtherCAT/RS485, ROS-रेडी
ROBOTERA XHAND 1 रोबोट हाथ - 12 डिग्री फ्रीडम, 270° टैक्टाइल फिंगरटिप्स, 80N ग्रिप, 25 किग्रा लिफ्ट, EtherCAT/RS485, ROS-रेडी
ROBOTERA
पिकअप उपलब्धता लोड नहीं की जा सकी
Overview
ROBOTERA XHAND 1 एक पांच-उंगली वाला रोबोट हाथ है जिसमें पूर्ण प्रत्यक्ष-ड्राइव जॉइंट मॉड्यूल और 12 सक्रिय डिग्री ऑफ फ्रीडम (DoF) हैं। यह हाथ मानव हाथ के आकार का है (191 मिमी x 94 मिमी x 47 मिमी) और उच्च-रिज़ॉल्यूशन टैक्टाइल सेंसिंग, मजबूत ग्रिप स्ट्रेंथ, और रोबोटिक्स अनुसंधान और एकीकरण के लिए डेवलपर-फ्रेंडली इंटरफेस के साथ कुशल हेरफेर के लिए डिज़ाइन किया गया है।
मुख्य विशेषताएँ
- पूर्ण प्रत्यक्ष-ड्राइव आर्किटेक्चर जिसमें एकीकृत गियर-चालित, बल-नियंत्रित जॉइंट मॉड्यूल (अंगूठे में 3; अन्य चार उंगलियों में 9)।
- 12 पूरी तरह से सक्रिय DoF; जटिल हाथ में हेरफेर के लिए इंडेक्स फिंगर का पार्श्व झूलना +/-15°।
- उच्च ग्रिप प्रदर्शन: fingertip बल 15N; अधिकतम ग्रिप स्ट्रेंथ 80N; अधिकतम ग्रास्प वजन 25 किलोग्राम (हाथ ऊपर) और 16 किलोग्राम (हाथ बाईं ओर)।
- उच्च गति सक्रियण जो >2Hz ओपन/क्लोज़ पुनरावृत्ति का समर्थन करता है; 10 CPS (क्लिक्स प्रति सेकंड) तक की उंगली क्लिकिंग प्रदर्शित की गई।
- 270° फिंगरटिप टैक्टाइल कवरेज पांच तीन-आयामी टैक्टाइल एरे सेंसर के साथ; पूरे हाथ का रिज़ॉल्यूशन 12x10 प्रति फिंगरटिप x 5।
- तीन-आयामी बल संवेदन जिसमें तिर्यक बल (X और Y); फिंगरटिप पुनरावृत्ति स्थिति सटीकता +/-0.20 मिमी।
- डंपिंग के साथ बैक-ड्राइव करने योग्य <= 0.1 Nm; वर्तमान-लूप बल नियंत्रण और बल-स्थिति नियंत्रण के लिए सहायक इंटरैक्शन।
- डेवलपर-फ्रेंडली कनेक्टिविटी: EtherCAT और RS485 (USB); ROS1/ROS2, Ubuntu (Linux), x86 और ARM आर्किटेक्चर, TwinCAT, और सामान्य रोबोटिक आर्म्स (जिसमें xARM, Realman, UR शामिल हैं) के साथ संगत।
- 1,000,000 बिना-लोड ग्रास्प चक्रों के लिए स्थायित्व रेटेड; संचालन तापमान -20°C ~ 60°C।
पूछताछ, एकीकरण समर्थन, या थोक खरीद के लिए, संपर्क करें [email protected] or देखें https://rcdrone.top/।
विशेषताएँ
| पैरामीटर | मान |
|---|---|
| वजन | 1100 ग्राम |
| आकार (L x W x T) | 191 मिमी x 94 मिमी x 47 मिमी (एक वयस्क के हाथ का आकार) |
| सक्रिय DoF (कुल) | 12 |
| निष्क्रिय DOF (कुल) | 0 |
| DoF आवंटन | अंगूठा x 3; तर्जनी x 3; मध्य अंगुली x 2; अनामिका x 2; छोटी अंगुली x 2 |
| अंगूठा क्रियान्वयन/संक्रमण | 3 गियर-चालित बल-नियंत्रित संयुक्त मॉड्यूल |
| चार-अंगुली क्रियान्वयन/संक्रमण | 9 गियर-चालित बल-नियंत्रित संयुक्त मॉड्यूल |
| अंगुली के टिप की कॉन्फ़िगरेशन | गोल या गोलाकार अंगुली के टिप |
| पार्श्व स्विंग | -15°~+15° (तर्जनी) |
| फिंगरटिप रिपीट पोजिशनिंग एक्यूरेसी | +/− 0.20 मिमी |
| नियंत्रण मोड | स्थिति नियंत्रण (कम डैम्पिंग/उच्च डैम्पिंग), करंट-लूप बल नियंत्रण, बल-स्थिति नियंत्रण |
| उंगलियों का बल | 15N |
| अधिकतम पकड़ने की ताकत (पूरा हाथ) | 80N |
| अधिकतम पकड़ने का वजन (हाथ का बायां भाग) | 16 किलोग्राम |
| अधिकतम पकड़ने का वजन (हाथ का ऊपरी भाग) | 25 किलोग्राम |
| अंगूठे की सबसे दूर की स्थिति | छोटी पिंक |
| खोलने/बंद करने की पुनरावृत्ति गति | >2Hz |
| बैक-ड्राइव डैम्पिंग (बैकड्राइव करने योग्य) | <= 0.1 Nm |
| स्पर्शीय कवरेज | 270° पांच-उंगली की टिप का घेराव |
| स्पर्शीय सेंसर की संख्या | पांच उंगलियों पर 270° तीन-आयामी घेराव स्पर्शीय एरे सेंसर |
| स्पर्शीय संकल्प (पूरी हाथ) | 12x10 (270° घेराव प्रति उंगली) x 5 |
| स्पर्शीय संवेदन आयाम | तीन-आयामी बल संवेदन (समावेशी तिर्यक बल X और Y) |
| पूरे हाथ का नियंत्रण आवृत्ति | 83Hz |
| संवाद दर | EtherCAT: 100MHz; RS485: 3MHz |
| संवेदन पैरामीटर | उंगलियों के टिप: 120 तीन-आयामी प्रोफाइलिंग एरे बल; जोड़ों: स्थिति, गति, तापमान, वर्तमान (टॉर्क) |
| नियंत्रण पैरामीटर | जोड़ स्थिति; जोड़ टॉर्क; जोड़ कठोरता गुणांक; जोड़ डैम्पिंग गुणांक |
| नो-लोड ग्रास्प साइकिल | 1,000,000 साइकिल |
| ऑपरेटिंग तापमान रेंज | -20°C ~ 60°C |
| कार्यशील वोल्टेज | 24V ~ 72V |
| स्थैतिक करंट | 0.15A @48V, 7W |
| अधिकतम धारा | 2.5A @48V, 120W |
| संचार इंटरफेस | RS485 (USB), EtherCAT |
अनुप्रयोग
- टेलीऑपरेशन: MR और ग्लव टेलीऑपरेशन का समर्थन करता है; विज़न प्रो टेलीऑपरेशन; मैनस ग्लव्स; पिको/मेटा क्वेस्ट।
- रोबोटिक आर्म और मानवाकार एकीकरण: xARM, Realman, UR, और अन्य रोबोटिक आर्म के साथ संगत।
- अनुसंधान और सिमुलेशन: सटीक URDF, स्पर्श संवेदन सिमुलेशन; इसाक जिम और म्यूजोक के साथ सुदृढीकरण सीखने के लिए उपयुक्त।
- मानव-यंत्र इंटरैक्शन और मानव उपकरणों का संचालन सहिष्णु बल नियंत्रण के साथ।
हस्तनिर्देश
Xhand_adapter.stp
MH2.25_right_stp.zip
MH2.25_left_stp.zip
XHand_Control_ROS_Documentation.pdf
X-Hand_1_Product_Manual_1.0.pdf
X-Hand_1_User_Quick_Start_Instructions_1.0.pdf
विवरण

ROBOTERA XHAND1 रोबोटिक हाथ है जिसमें पूर्ण प्रत्यक्ष ड्राइव है, जो सच्ची स्वतंत्रता और उन्नत चतुराई प्रदान करता है।

XHAND1 द्वारा ROBOTERA: मानवाकार पांच-उंगली वाला हाथ जिसमें 12 स्वतंत्रता के डिग्री, प्रत्येक fingertip पर 270° स्पर्श संवेदक, 80N पकड़ बल, 25kg लोड क्षमता है। जटिल कार्यों और उपकरणों को संभालने के लिए डिज़ाइन किया गया है।

XHAND 1: प्रत्येक जोड़ के लिए प्रत्यक्ष-ड्राइव मॉड्यूल के साथ पहला चतुर हाथ। इसमें उच्च-शक्ति वाले बिना तार के मोटर्स, कम-डैम्पिंग रिड्यूसर्स, सटीक एनकोडर, और उन्नत रोबोटिक संचालन के लिए स्व-विकसित एकीकृत जोड़ मॉड्यूल शामिल हैं।
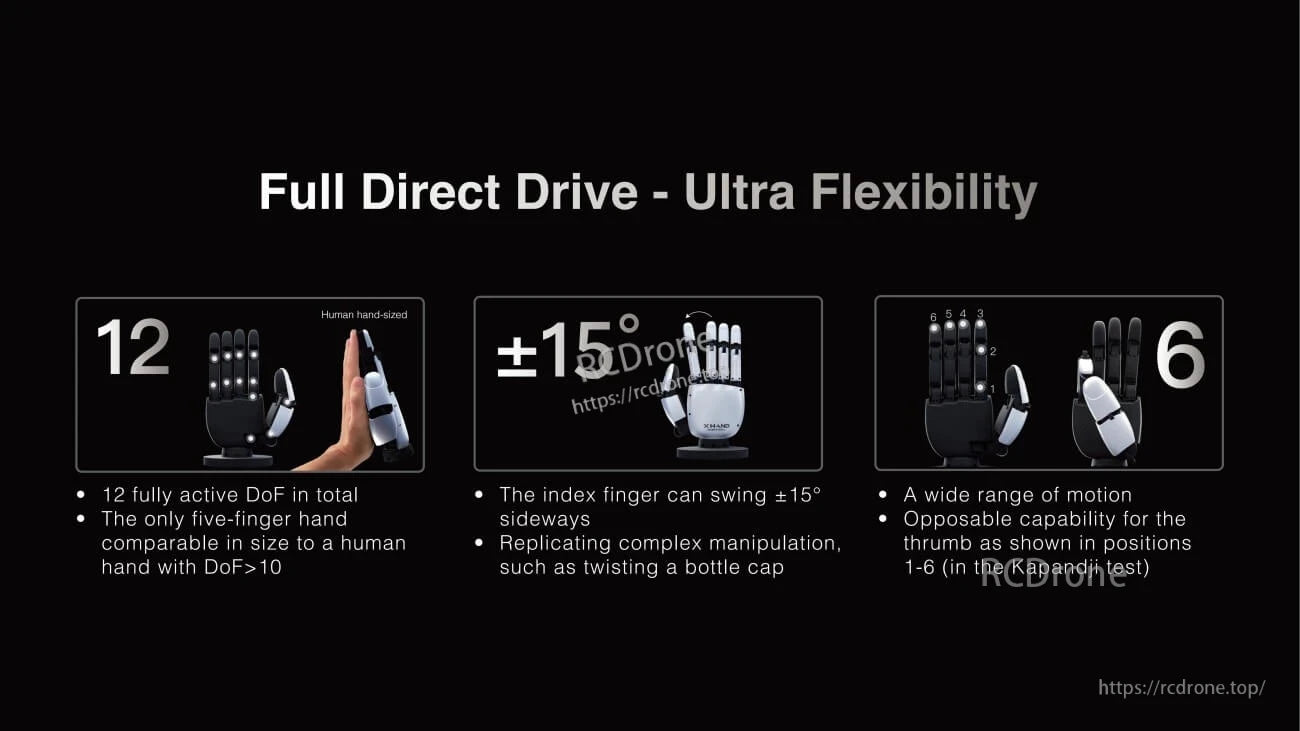
ROBOTERA XHAND 1 एक अत्यधिक लचीला, मानव-आकार का रोबोटिक हाथ है जिसमें 12 सक्रिय DoF हैं। इसकी तर्जनी ±15° साइडवेज में झूलती है जटिल कार्यों के लिए, और अंगूठा बहुपरकारी संचालन के लिए छह विपरीत स्थितियाँ प्रदान करता है।

ROBOTERA XHAND 1: 25kg लोड, 80N ग्रिप ताकत, पूर्ण डायरेक्ट ड्राइव, समान लिंक/टेंडन-चालित समाधानों को पार करता है।

पूर्ण डायरेक्ट ड्राइव रोबोट हाथ गियर-चालित गति के साथ 10 CPS प्राप्त करता है, 1 Nm से अधिक टॉर्क, लिंक और टेंडन सिस्टम को बेहतर गेमिंग प्रदर्शन के लिए पीछे छोड़ता है।

ROBOTERA XHAND 1 में 270° फिंगरटिप सेंसर हैं जिनमें >100 पॉइंट्स और 0.05 N सटीकता है 3D बल, स्पर्श, और तापमान संवेदन के लिए, जो बेहतर ग्रिप प्रदर्शन सुनिश्चित करता है।
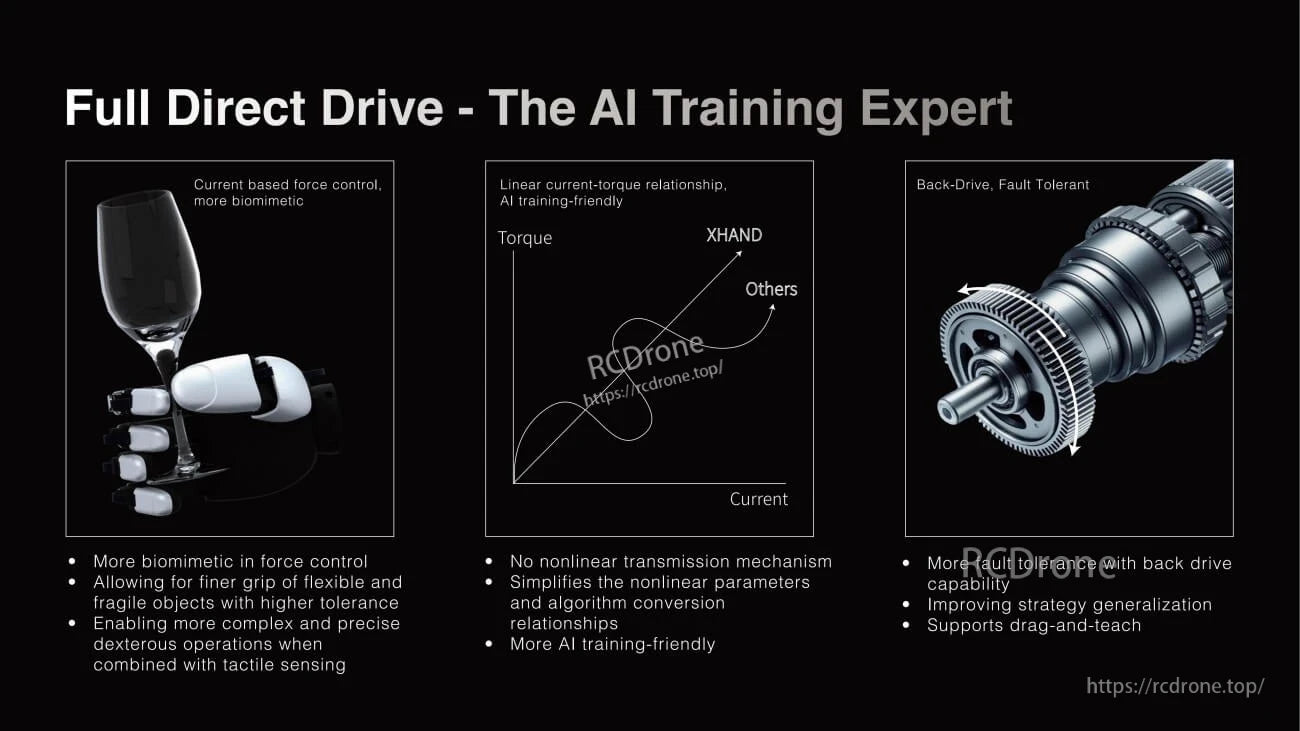
ROBOTERA XHAND 1 जैव-नकल बल नियंत्रण, एआई प्रशिक्षण के लिए रैखिक टॉर्क-करंट प्रतिक्रिया, और बैक-ड्राइव दोष सहिष्णुता प्रदान करता है—सटीक हैंडलिंग, सरल एल्गोरिदम, ड्रैग-एंड-टीच समर्थन, और बेहतर रणनीति सामान्यीकरण को सक्षम बनाता है।
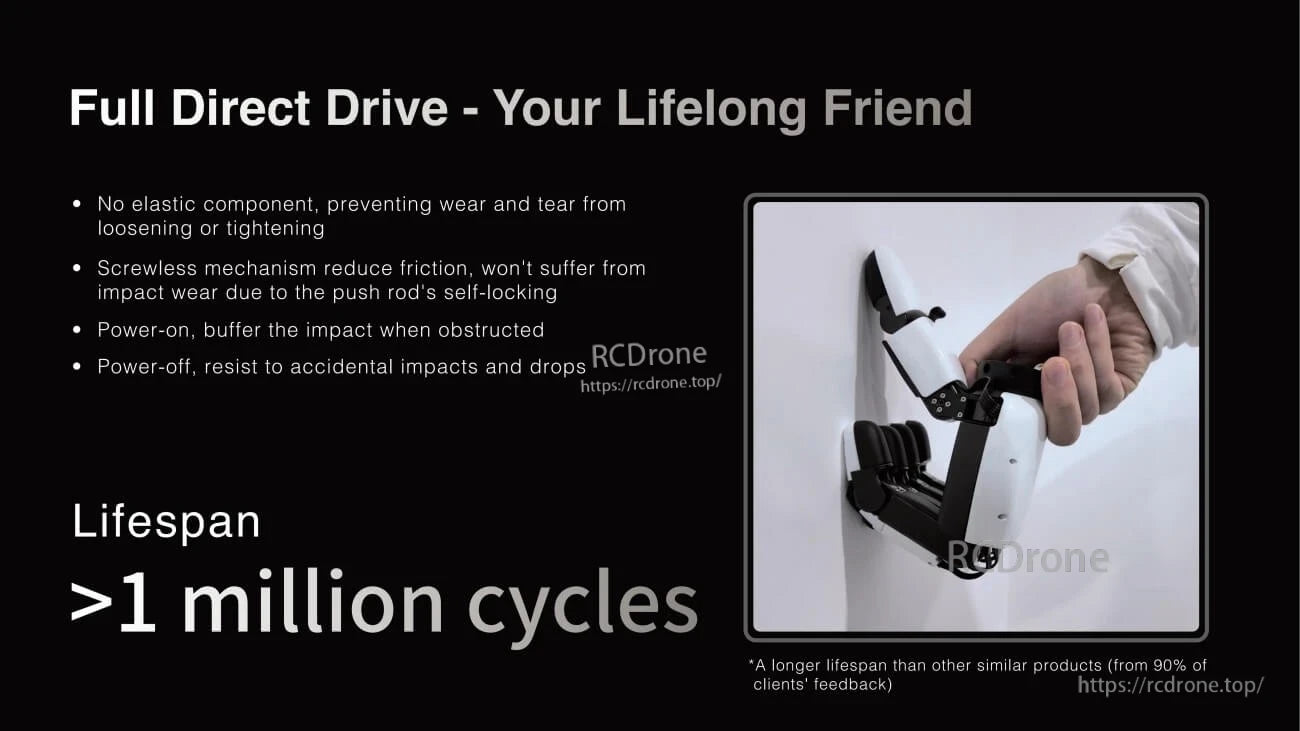
पूर्ण डायरेक्ट ड्राइव रोबोट हाथ बिना किसी इलास्टिक भागों या स्क्रू के साथ स्थायित्व प्रदान करता है, चालू होने पर प्रभाव बफरिंग, बंद होने पर गिरने के प्रतिरोध, और एक मिलियन से अधिक चक्रों की आयु—ग्राहक की प्रतिक्रिया के अनुसार समान उत्पादों को पीछे छोड़ता है।

ROBOTERA XHAND 1 MR और ग्लव टेलीऑपरेशन का समर्थन करता है, ROS1/ROS2 और x64/ARM पर उबंटू के साथ संगत है। xARM, Realman, UR रोबोटिक आर्म्स के साथ एकीकरण के लिए EtherCAT/TwinCAT/RS485 की विशेषताएँ हैं। सटीक URDF मॉडलिंग और स्पर्श संवेदन सिमुलेशन प्रदान करता है। डेवलपर-फ्रेंडली रोबोटिक्स अनुप्रयोगों के लिए क्रॉस-प्लेटफ़ॉर्म लचीलापन और उन्नत नियंत्रण प्रोटोकॉल के साथ डिज़ाइन किया गया है।
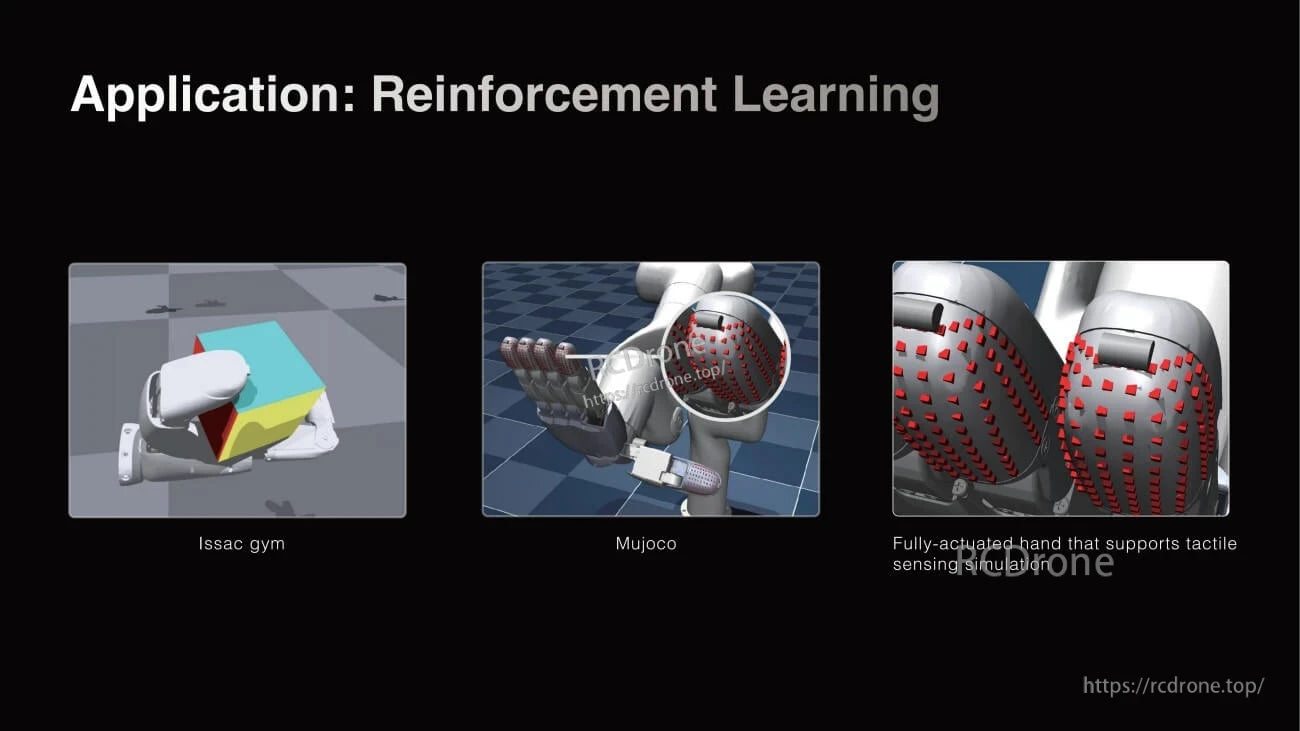
सुदृढीकरण शिक्षण अनुप्रयोग: Issac जिम, Mujoco, और उन्नत रोबोटिक नियंत्रण और प्रशिक्षण वातावरण के लिए स्पर्श संवेदन सिमुलेशन के साथ पूर्ण-क्रियाशील हाथ।
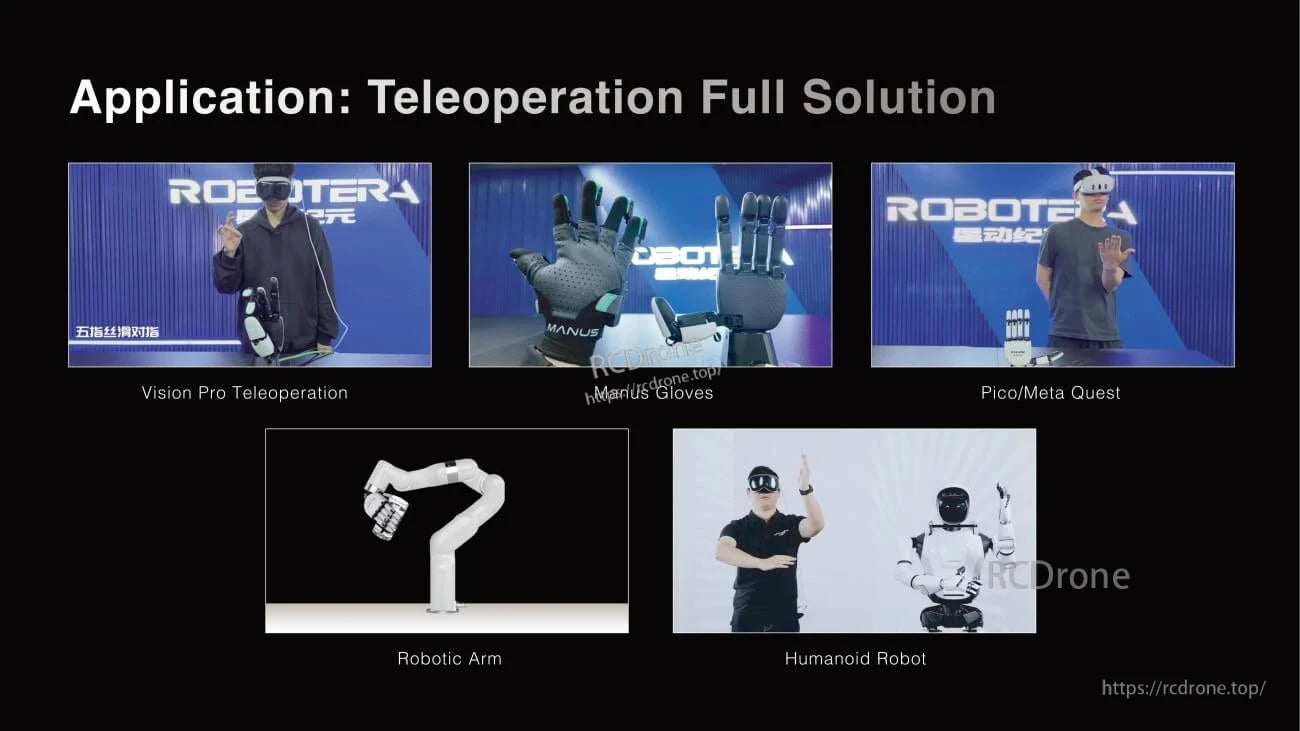
दूरसंचालन के लिए पूर्ण समाधान जिसमें Vision Pro, Manus Gloves, Pico/Meta Quest, रोबोटिक हाथ, और मानवाकार रोबोट शामिल हैं, जो उन्नत दूरस्थ नियंत्रण के लिए है।
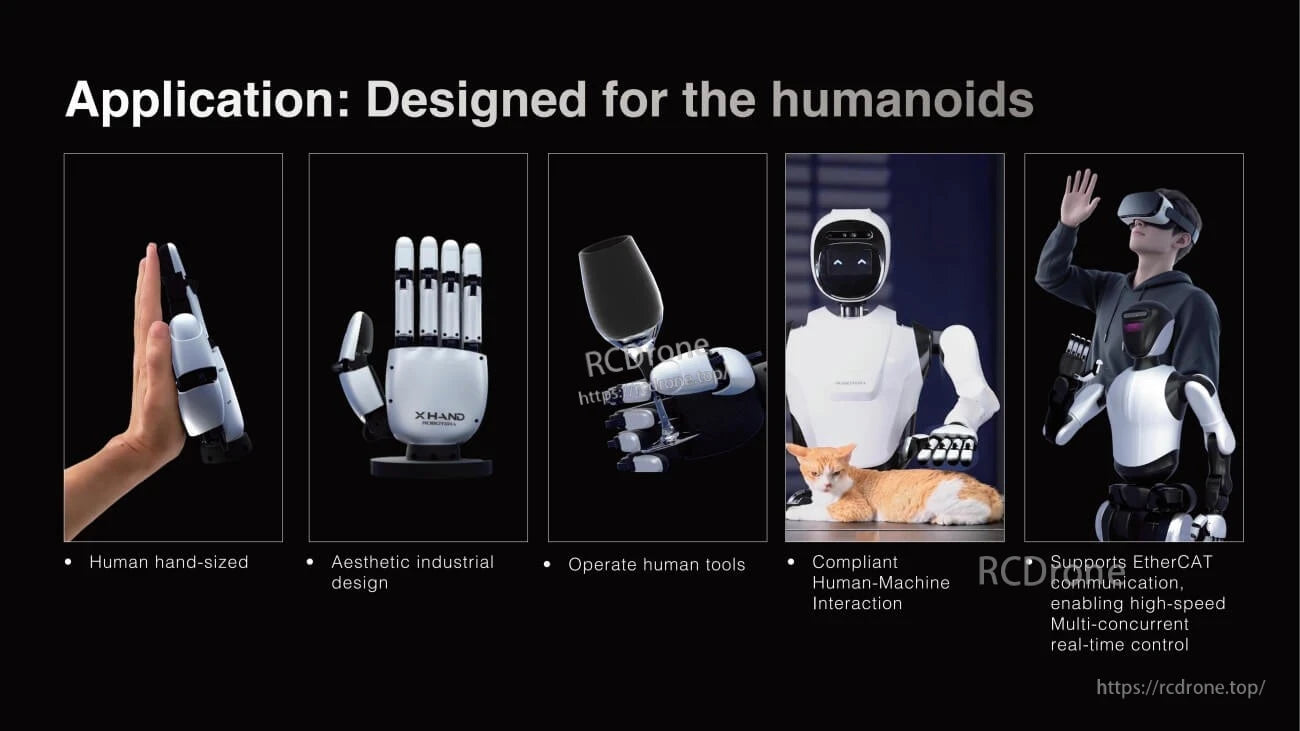
मानव आकार का रोबोट हाथ, सौंदर्यपूर्ण डिज़ाइन के साथ, उपकरणों का संचालन करता है, सहायक इंटरैक्शन को सक्षम बनाता है, वास्तविक समय नियंत्रण के लिए EtherCAT का समर्थन करता है।
Related Collections




