


















Yahboom ROSMASTER M3 ROS2 एआई बड़ा मॉडल रोबोट कार मेकेनम व्हील्स के साथ Orin Nano/NX SUPER, RDK X5, Pi 5 के लिए
Yahboom ROSMASTER M3 ROS2 एआई बड़ा मॉडल रोबोट कार मेकेनम व्हील्स के साथ Orin Nano/NX SUPER, RDK X5, Pi 5 के लिए
Yahboom
पिकअप उपलब्धता लोड नहीं की जा सकी
ओवरव्यू
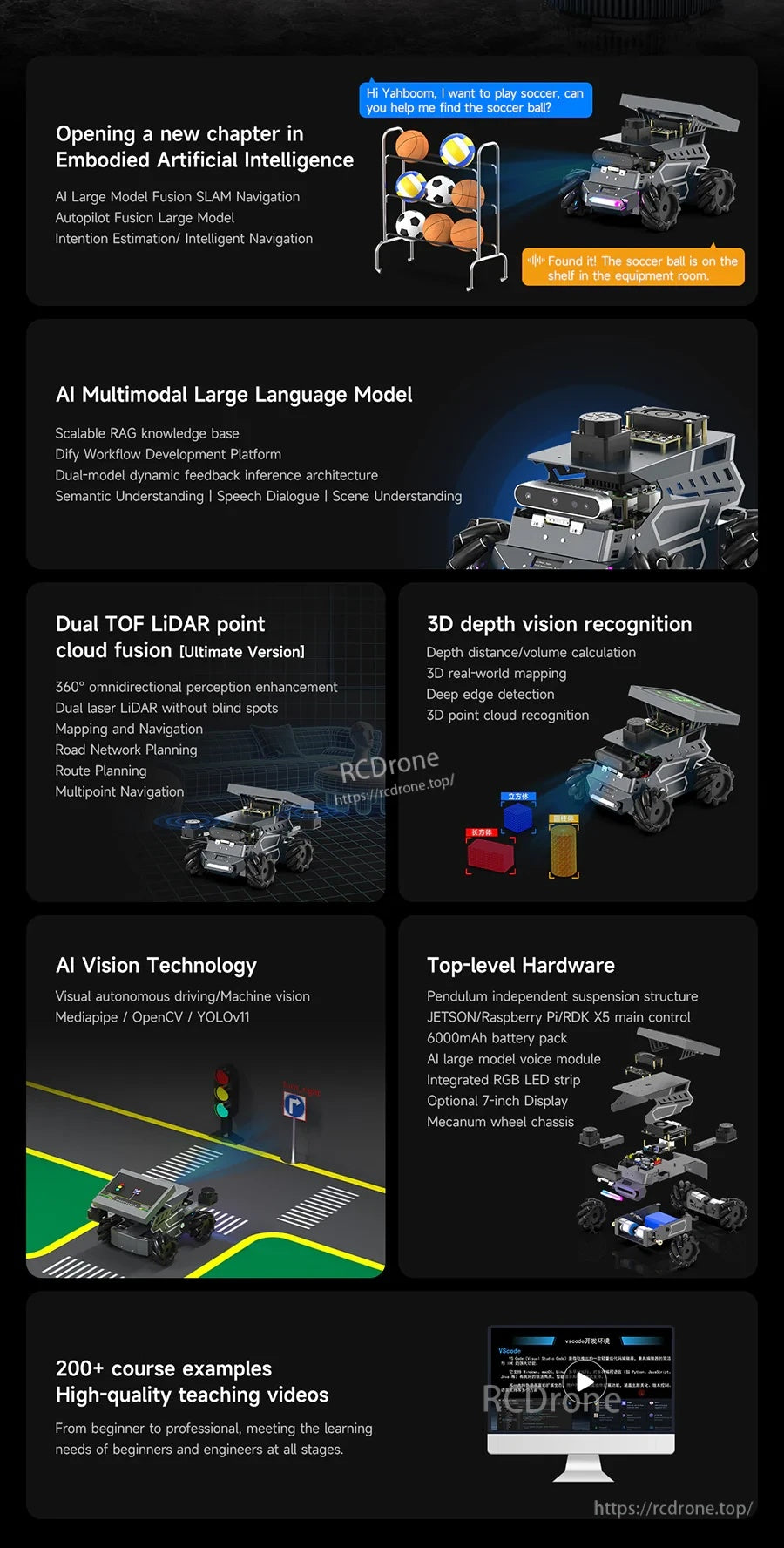
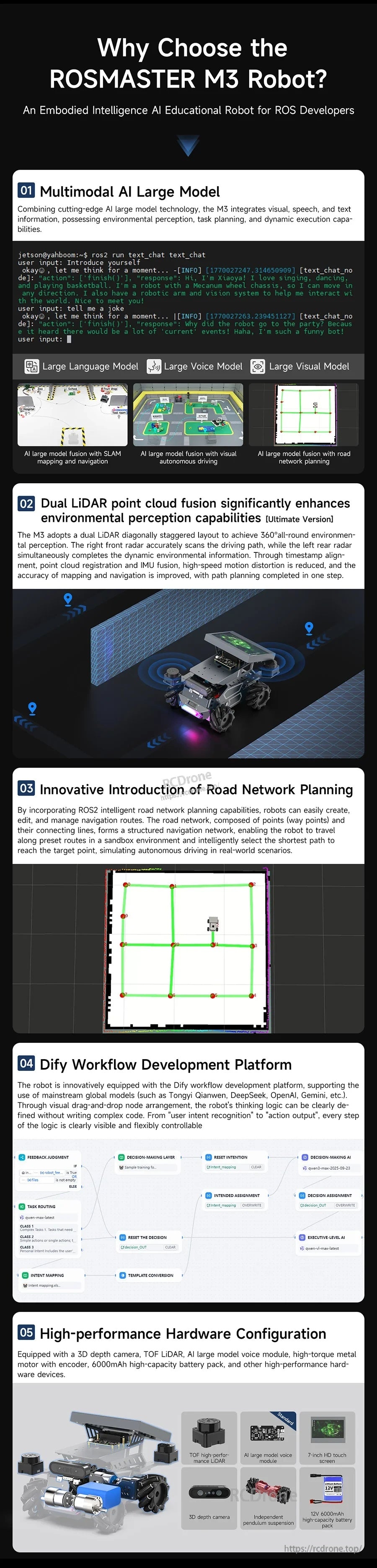
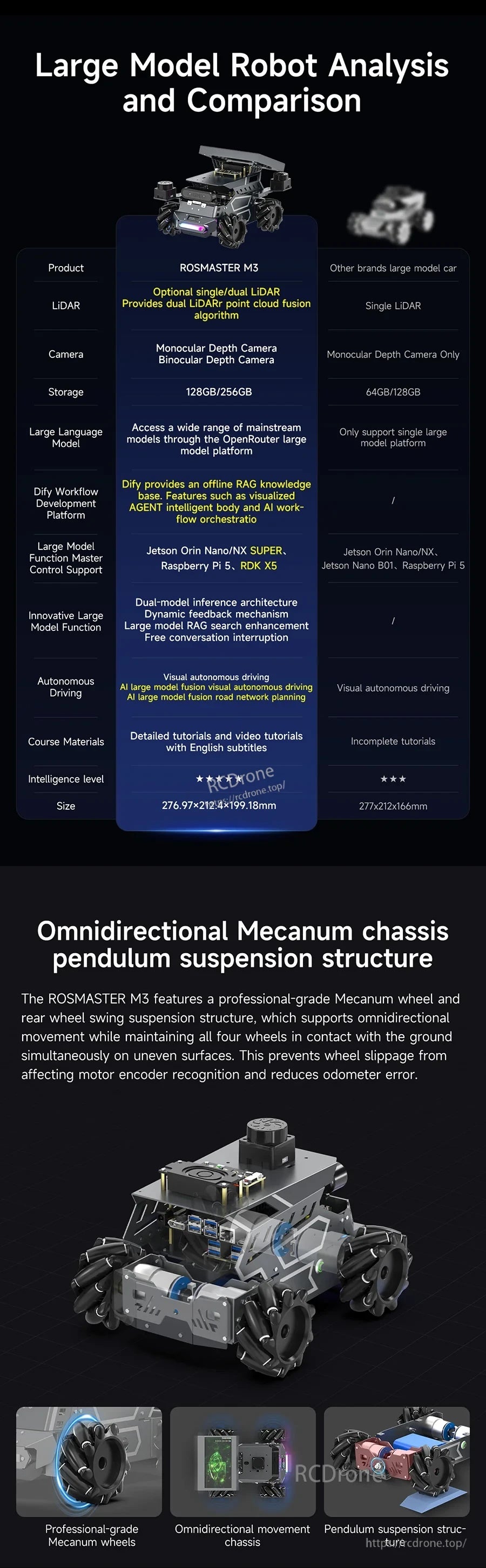
Yahboom ROSMASTER M3 एक ROS2 रोबोट कार प्लेटफॉर्म है जो Jetson Orin Nano/Orin NX SUPER, Raspberry Pi 5, और RDK X5 के लिए डिज़ाइन किया गया है। यह मल्टीमॉडल AI (टेक्स्ट/विज़न/वॉइस) को SLAM नेविगेशन के साथ एकीकृत करता है, और इसमें 360° सर्वदिशात्मक गति के लिए एक मेकानम व्हील चेसिस के साथ एक पेंडुलम-शैली स्वतंत्र सस्पेंशन संरचना है। कॉन्फ़िगरेशन के आधार पर, यह वैकल्पिक सिंगल/डुअल TOF LiDAR का समर्थन करता है और 3D विज़न अनुप्रयोगों के लिए DaBai DCW2 गहराई कैमरा का उपयोग करता है।
मुख्य विशेषताएँ
- एआई मल्टीमॉडल बड़े भाषा मॉडल अनुप्रयोग: अर्थपूर्ण समझ, भाषण संवाद, और दृश्य समझ
- बड़े-मॉडल वर्कफ़्लो विकसित और तैनात करने के लिए डिफ़ी वर्कफ़्लो विकास प्लेटफ़ॉर्म समर्थन
- डुअल-मॉडल इंफरेंस आर्किटेक्चर के साथ डायनामिक फीडबैक इंफरेंस और वार्तालाप रुकावट समर्थन
- LiDAR + एन्कोडर + IMU (जाइरोस्कोप) फ्यूजन मैपिंग और नेविगेशन के लिए; कई मैपिंग एल्गोरिदम का समर्थन करता है
- DaBai DCW2 गहराई कैमरा: गहराई छवि + पॉइंट क्लाउड 3D दृष्टि मैपिंग, माप, और पहचान के लिए
- प्रोफेशनल-ग्रेड मेकानम व्हील्स + पेंडुलम सस्पेंशन एन्कोडर पहचान पर पहिया फिसलने के प्रभाव को कम करने और ओडोमीटर त्रुटि को कम करने के लिए
- एकीकृत RGB हेडलाइट्स/LED स्ट्रिप के साथ फ्लोइंग, ब्रीदिंग, और मार्की लाइटिंग इफेक्ट्स; अनुकूलन योग्य रंग/चमक
- AI vision stack support: OpenCV / MediaPipe / YOLOv11; इसमें इशारा पहचान, QR कोड पहचान, मुद्रा अनुमान, छवि विभाजन, और वस्तु पहचान जैसी कार्यक्षमताएँ शामिल हैं
- मल्टी-रोबोट संरचना और इंटरकनेक्शन नियंत्रण: एक ही नक्शे पर मल्टी-रोबोट नेविगेशन और गतिशील बाधा से बचाव; एक होस्ट द्वारा नियंत्रित कई रोबोट
विशेष विवरण
| रोबोट का आकार | 276.97 x 212.4 x 199.18 मिमी |
| चेसिस | मेकानम व्हील चेसिस (सर्वदिशीय गति) |
| सस्पेंशन | पेंडुलम स्वतंत्र सस्पेंशन संरचना |
| गहराई कैमरा | DaBai DCW2 गहराई कैमरा |
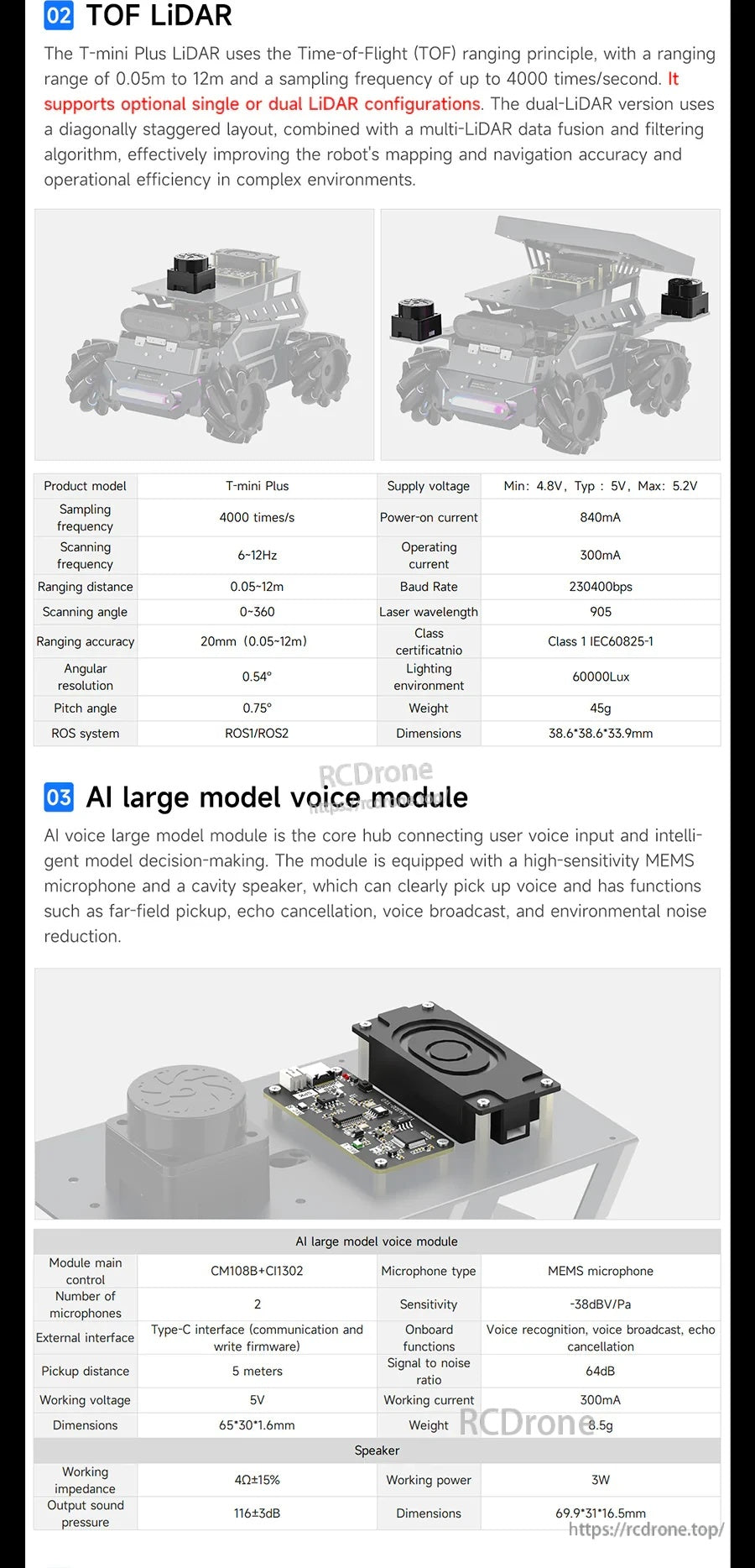
| LiDAR | T-MINI PLUS LiDAR (वैकल्पिक एकल/दोहरी TOF LiDAR; दोहरी पॉइंट क्लाउड फ्यूजन अल्टीमेट संस्करण के लिए है) |
| लाइटिंग | एकीकृत RGB हेडलाइट्स/LED स्ट्रिप |
| बैटरी | 6000mAh बैटरी पैक |
| वैकल्पिक डिस्प्ले | 7-इंच डिस्प्ले (वैकल्पिक; संस्करण पर निर्भर करता है) |
| OS / ROS (नियंत्रक द्वारा) | Raspberry Pi OS + Docker + ROS2 Humble; Ubuntu 22.04 + ROS2 Humble; Ubuntu 22.04 LTS + ROS2 Humble |
| स्टोरेज (कॉन्फ़िगरेशन द्वारा) | 128GB / 256GB (e.g. , 128GB TF कार्ड; 256GB SSD) |
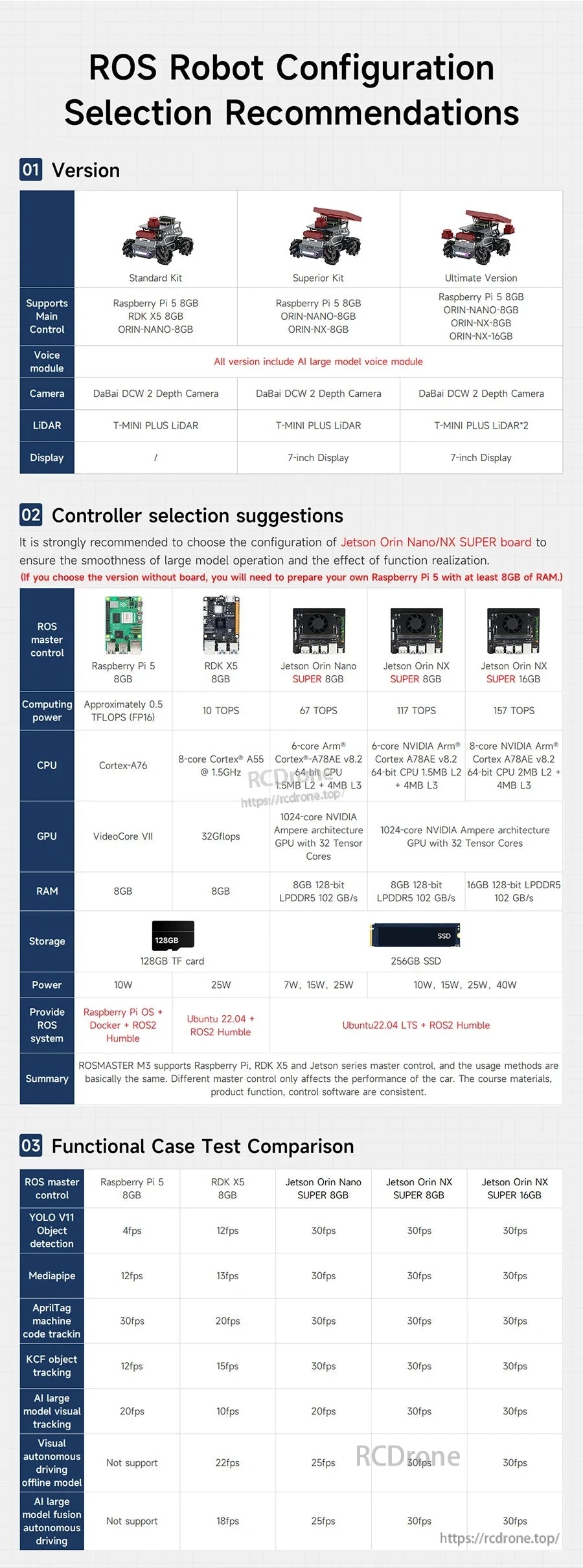
संस्करण विकल्प (कॉन्फ़िगरेशन चयन)
| आइटम | स्टैंडर्ड किट | सुपीरियर किट | अल्टीमेट संस्करण |
|---|---|---|---|
| समर्थित मुख्य नियंत्रण | रास्पबेरी पाई 5 8GB; RDK X5 8GB; ORIN-NANO-8GB | रास्पबेरी पाई 5 8GB; ORIN-NANO-8GB; ORIN-NX-8GB | रास्पबेरी पाई 5 8GB; ORIN-NANO-8GB; ORIN-NX-8GB; ORIN-NX-16GB |
| वॉयस मॉड्यूल | सभी संस्करणों में AI बड़ा मॉडल वॉयस मॉड्यूल शामिल है | ||
| कैमरा | DaBai DCW2 डेप्थ कैमरा | DaBai DCW2 डेप्थ कैमरा | DaBai DCW2 डेप्थ कैमरा |
| LiDAR | T-MINI PLUS LiDAR | T-MINI PLUS LiDAR | T-MINI PLUS LiDAR *2 |
| डिस्प्ले | / | 7-इंच डिस्प्ले | 7-इंच डिस्प्ले |
नोट: केवल अल्टीमेट संस्करण ही डुअल T-mini प्लस LiDARs के साथ कॉन्फ़िगर किया गया है।
कंट्रोलर चयन सुझाव (संदर्भ)
बड़े-मॉडल संचालन की सुगमता और कार्यात्मक परिणामों को सुधारने के लिए, Jetson Orin Nano/NX SUPER का चयन करने की सिफारिश की जाती है। यदि बोर्ड के बिना संस्करण चुनते हैं, तो कम से कम 8GB RAM के साथ Raspberry Pi 5 तैयार करें।
| कंट्रोलर | कंप्यूटिंग पावर | CPU | GPU | RAM | स्टोरेज | पावर | प्रदान किया गया ROS सिस्टम |
|---|---|---|---|---|---|---|---|
| Raspberry Pi 5 8GB | लगभग 0.5 TFLOPS (FP16) | Cortex-A76 | VideoCore VII | 8GB | 128GB TF कार्ड | 10W | Raspberry Pi OS + Docker + ROS2 Humble |
| RDK X5 8GB | 10 TOPS | 8-कोर Cortex-A55 @ 1.5GHz | 32Gflops | 8GB | / | 25W | Ubuntu 22.2 64-bit CPU |
2MB L2 + 4MB L3
प्रदर्शन संदर्भ (कार्यात्मक केस परीक्षण तुलना)
| परीक्षण आइटम | रास्पबेरी पाई 5 8GB | RDK X5 8GB | Orin Nano SUPER 8GB | Orin NX SUPER 8GB | Orin NX SUPER 16GB |
|---|---|---|---|---|---|
| YOLO V11 ऑब्जेक्ट डिटेक्शन | 4fps | 12fps | 30fps | 30fps | 30fps |
| मीडियापाइप | 12fps | 13fps | 30fps | 30fps | 30fps |
| एप्रिलटैग मशीन कोड ट्रैकिंग | 30fps | 20fps | 30fps | 30fps | 30fps |
| KCF ऑब्जेक्ट ट्रैकिंग | 12fps | 15fps | 30fps | 30fps | 30fps |
| AI large model visual tracking | 20fps | 10fps | 20fps | 30fps | 30fps |
| दृश्य स्वायत्त ड्राइविंग (ऑफलाइन मॉडल) | समर्थित नहीं | 22fps | 25fps | 30fps | 30fps |
| AI large model fusion autonomous driving | समर्थित नहीं | 18fps | 25fps | 30fps | 30fps |
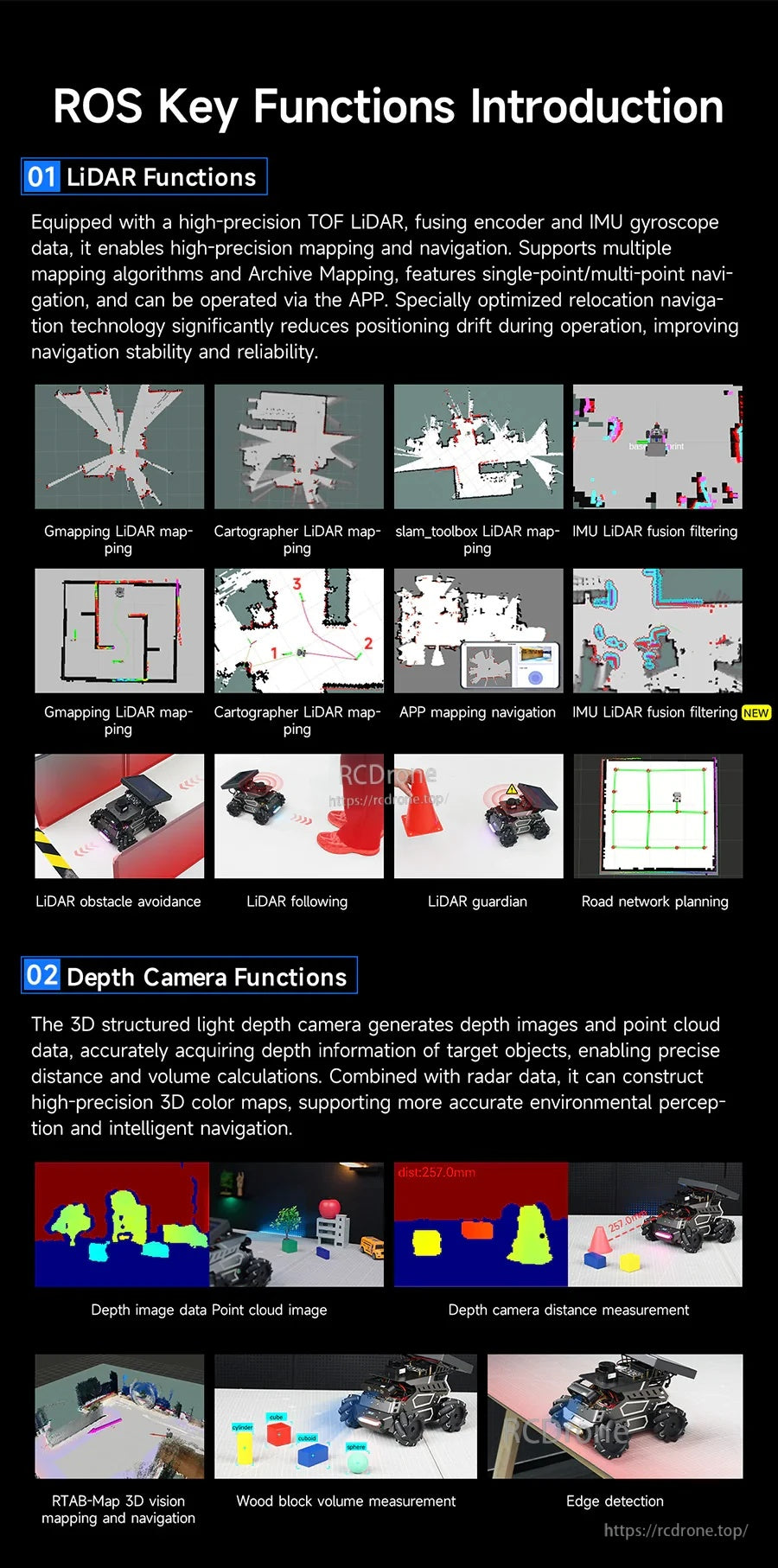
कार्य (LiDAR / गहराई कैमरा / दृष्टि)
LiDAR कार्य
- उच्च-सटीकता TOF LiDAR एन्कोडर और IMU (जाइरोस्कोप) फ्यूजन डेटा के साथ उच्च-सटीकता मानचित्रण और नेविगेशन के लिए
- कई मानचित्रण एल्गोरिदम और आर्काइव मैपिंग का समर्थन करता है
- एकल-बिंदु और बहु-बिंदु नेविगेशन का समर्थन करता है; एक ऐप के माध्यम से संचालित किया जा सकता है
- स्थानांतरण नेविगेशन प्रौद्योगिकी स्थिति बहाव को कम करती है, नेविगेशन स्थिरता और विश्वसनीयता में सुधार करती है
- मानचित्रण और नेविगेशन मोड दिखाए गए: Gmapping LiDAR मैपिंग, Cartographer LiDAR मैपिंग, slam_toolbox LiDAR मैपिंग, IMU LiDAR फ्यूजन फ़िल्टरिंग, APP मैपिंग नेविगेशन
- उदाहरण व्यवहार दिखाए गए: LiDAR बाधा परिहार, LiDAR फॉलोइंग, LiDAR गार्जियन, सड़क नेटवर्क योजना
गहराई कैमरा कार्य
- 3D संरचित प्रकाश गहराई कैमरा गहराई छवियाँ और बिंदु बादल डेटा उत्पन्न करता है
- गहराई दूरी और मात्रा की गणना; रडार डेटा के साथ संयोजन में उच्च-सटीकता 3D रंग मानचित्र बनाता है
- उदाहरण अनुप्रयोग दिखाए गए: RTAB-Map 3D दृष्टि मानचित्रण और नेविगेशन, लकड़ी के ब्लॉक की मात्रा माप, किनारा पहचान, गहराई कैमरा दूरी माप
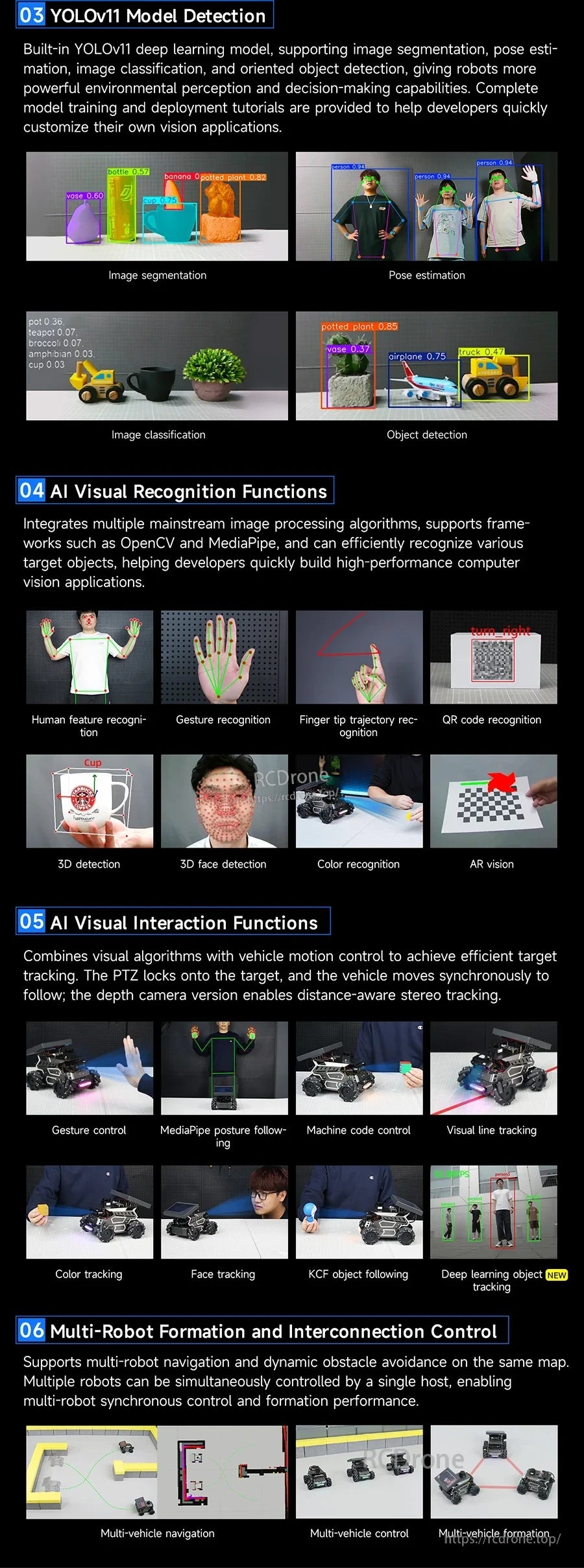
YOLOv11 मॉडल डिटेक्शन
- छवि विभाजन, मुद्रा अनुमान, छवि वर्गीकरण, और उन्मुख वस्तु पहचान का समर्थन करता है
एआई दृश्य पहचान / इंटरैक्शन
- OpenCV और MediaPipe जैसे फ्रेमवर्क का समर्थन करता है
- पहचान के उदाहरण दिखाए गए: मानव विशेषता पहचान, इशारा पहचान, उंगली की नोक की गति पहचान, क्यूआर कोड पहचान, 3D डिटेक्शन, 3D चेहरा पहचान, रंग पहचान, एआर दृष्टि
- इंटरैक्शन के उदाहरण दिखाए गए: इशारा नियंत्रण, MediaPipe मुद्रा अनुसरण, मशीन कोड नियंत्रण, दृश्य रेखा ट्रैकिंग, रंग ट्रैकिंग, चेहरा ट्रैकिंग, KCF वस्तु अनुसरण, गहन शिक्षण वस्तु ट्रैकिंग
स्वायत्त ड्राइविंग (सैंडबॉक्स) नोट्स
स्वायत्त ड्राइविंग सैंडबॉक्स परीक्षण को समर्थित दिखाया गया है: RDK X5, Orin Nano, और Orin NX पर।रास्पबेरी पाई बोर्ड इस फ़ंक्शन का समर्थन नहीं करते हुए दिखाए गए हैं। प्रदर्शित कार्यों में सड़क संकेत पहचान, लेन कीपिंग, स्वायत्त पार्किंग, और स्टीयरिंग निर्णय शामिल हैं।
एप्लिकेशन
- एसएलएएम मैपिंग और नेविगेशन
- सड़क नेटवर्क योजना, मार्ग योजना, और बहु-बिंदु नेविगेशन
- दृश्य समझ, दृश्य अनुसरण, गहरी दूरी Q&A, और स्वायत्त क्रूज़ प्रदर्शन
- मल्टी-रोबोट समकालिक गति नियंत्रण और गठन नियंत्रण
ट्यूटोरियल्स
खरीद से पहले कॉन्फ़िगरेशन सहायता के लिए (संस्करण, नियंत्रक चयन, और सहायक उपकरण), संपर्क करें https://rcdrone.top/ या ईमेल [email protected].
विवरण

मिलिए ROSMASTER M3 से: एक ROS2-तैयार रोबोट कार प्लेटफॉर्म जो लोकप्रिय एज नियंत्रकों पर मल्टीमॉडल एआई और एसएलएएम नेविगेशन के लिए बनाया गया है।
मल्टीमॉडल इंटरैक्शन, 3D धारणा, और सर्वदिशात्मक गतिशीलता एक एकीकृत प्लेटफॉर्म में एक साथ आते हैं।
डिफाई वर्कफ़्लो समर्थन और कई मैपिंग विकल्प डेमो से तैनात करने योग्य रोबोटिक्स अनुप्रयोगों तक जाने में मदद करते हैं।
धारणा सेंसर, नियंत्रक संगतता, और चेसिस प्रदर्शन की तुलना करके सही किट स्तर चुनें।

वैकल्पिक सिंगल/डुअल TOF LiDAR और प्रोग्रामेबल RGB लाइटिंग नेविगेशन और प्रस्तुति उपयोग मामलों का विस्तार करते हैं।
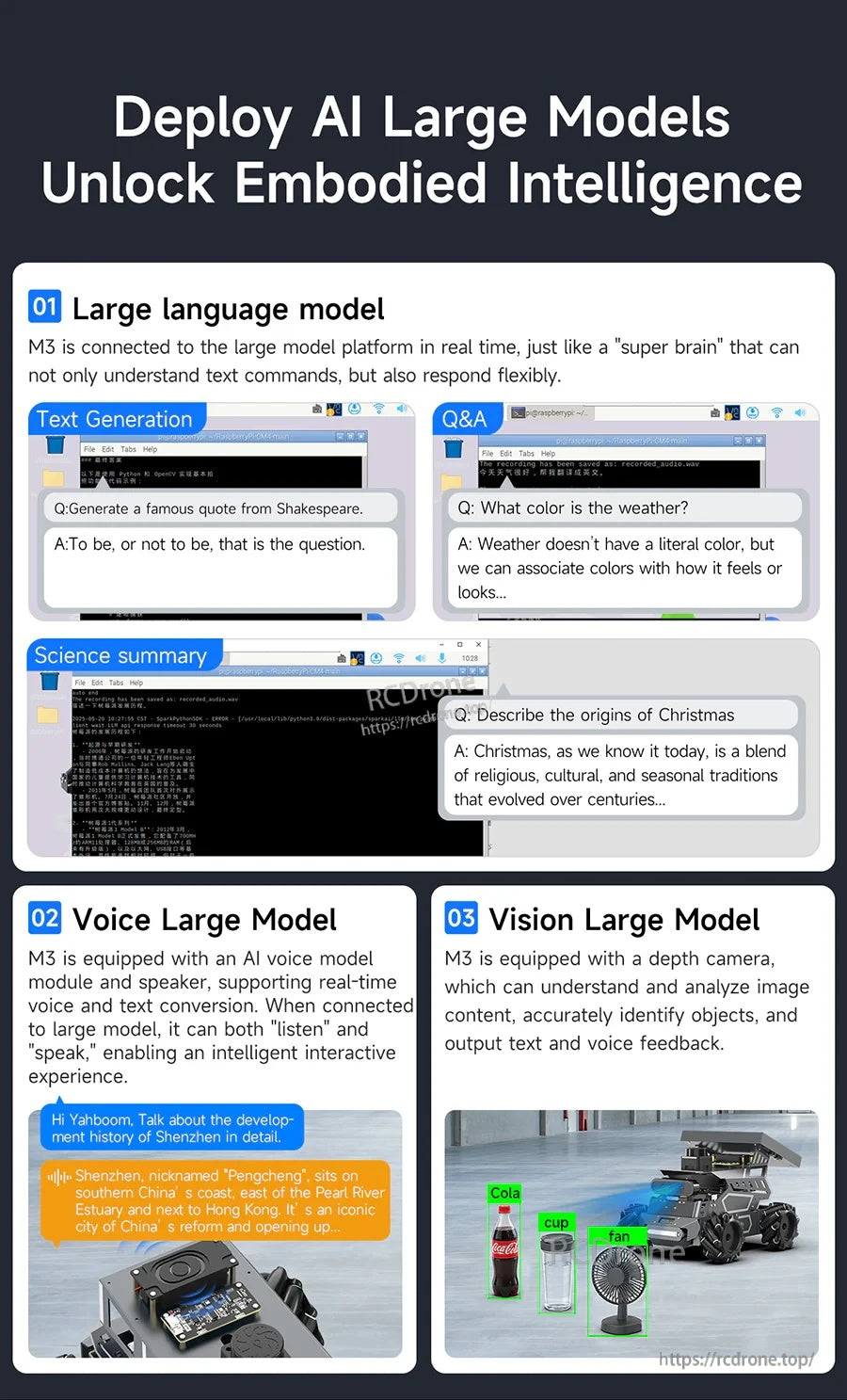
समृद्ध अर्थपूर्ण समझ और इंटरैक्टिव रोबोटिक्स के लिए टेक्स्ट, वॉयस, और विज़न मॉडल को एक साथ चलाएं।
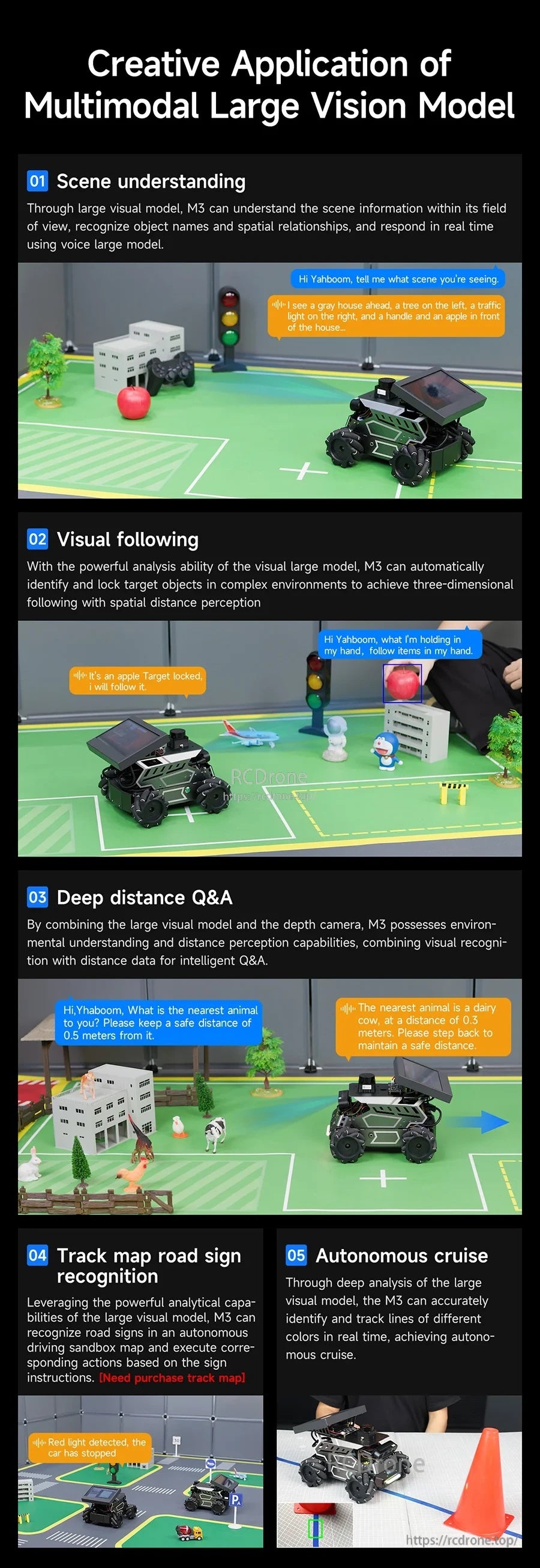
एक व्यावहारिक विज़न स्टैक ट्रैकिंग, पहचान, और वास्तविक दुनिया के परिदृश्यों के लिए इंटरैक्टिव Q&A का समर्थन करता है।
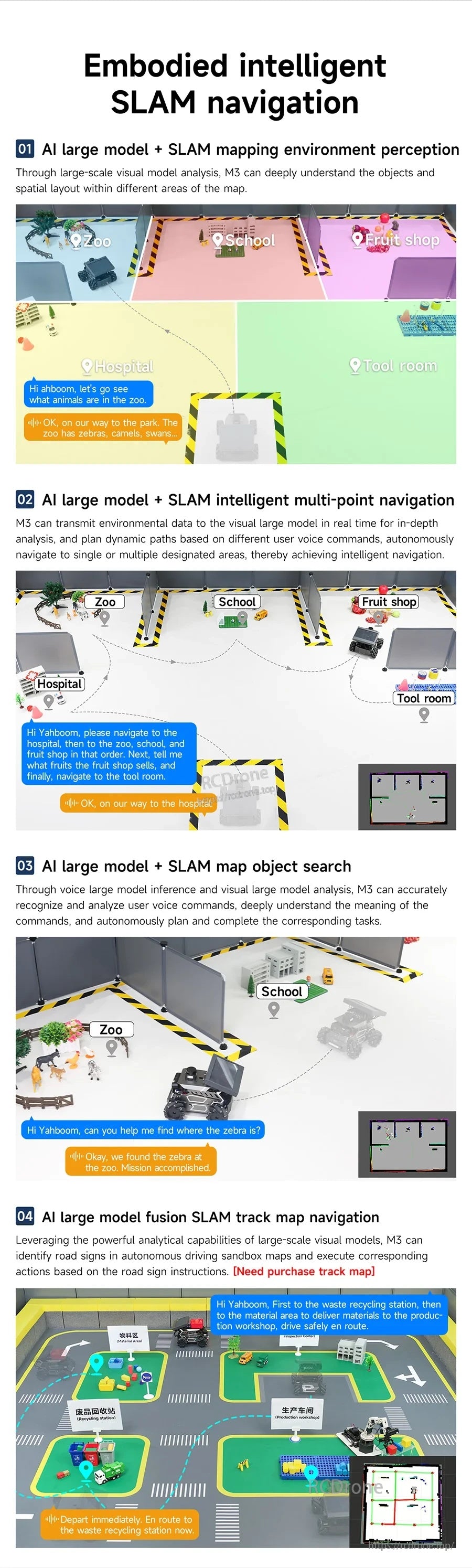
SLAM वर्कफ़्लो मैपिंग, पॉइंट-टू-पॉइंट नेविगेशन, और कार्य-उन्मुख अन्वेषण को कवर करते हैं।
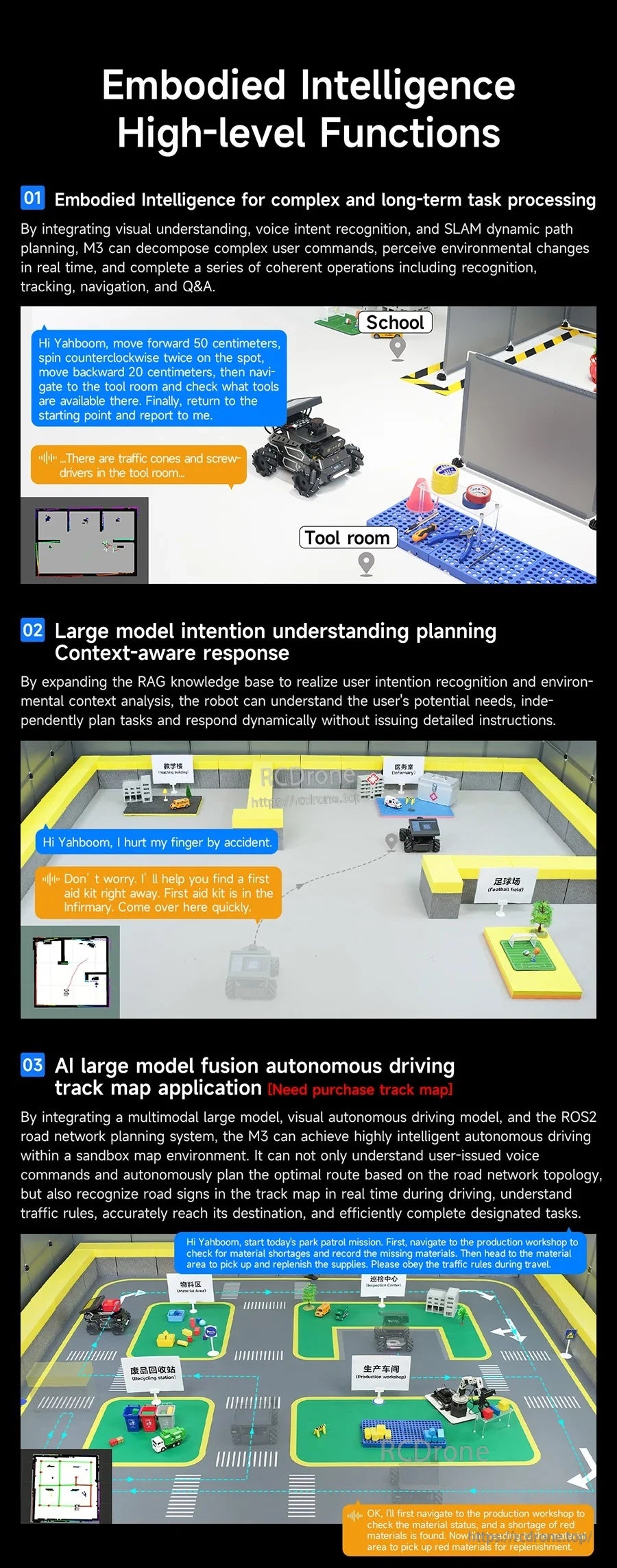
उच्च-स्तरीय योजना धारणा और मानचित्रण को जोड़ती है ताकि चरण-दर-चरण कार्यों को अधिक विश्वसनीयता से निष्पादित किया जा सके।
अपने नियंत्रक और सेंसर की आवश्यकताओं को मानक, श्रेष्ठ और अंतिम विकल्पों के साथ मिलाने के लिए चयन गाइड का उपयोग करें।
सेंसर फ्यूजन और ROS टूलिंग मानचित्रण, बाधा से बचाव, और गहराई-आधारित माप का समर्थन करते हैं।
विजन विशेषताओं में पहचान, ट्रैकिंग, इशारा पहचान, और बहु-रोबोट गठन नियंत्रण शामिल हैं।
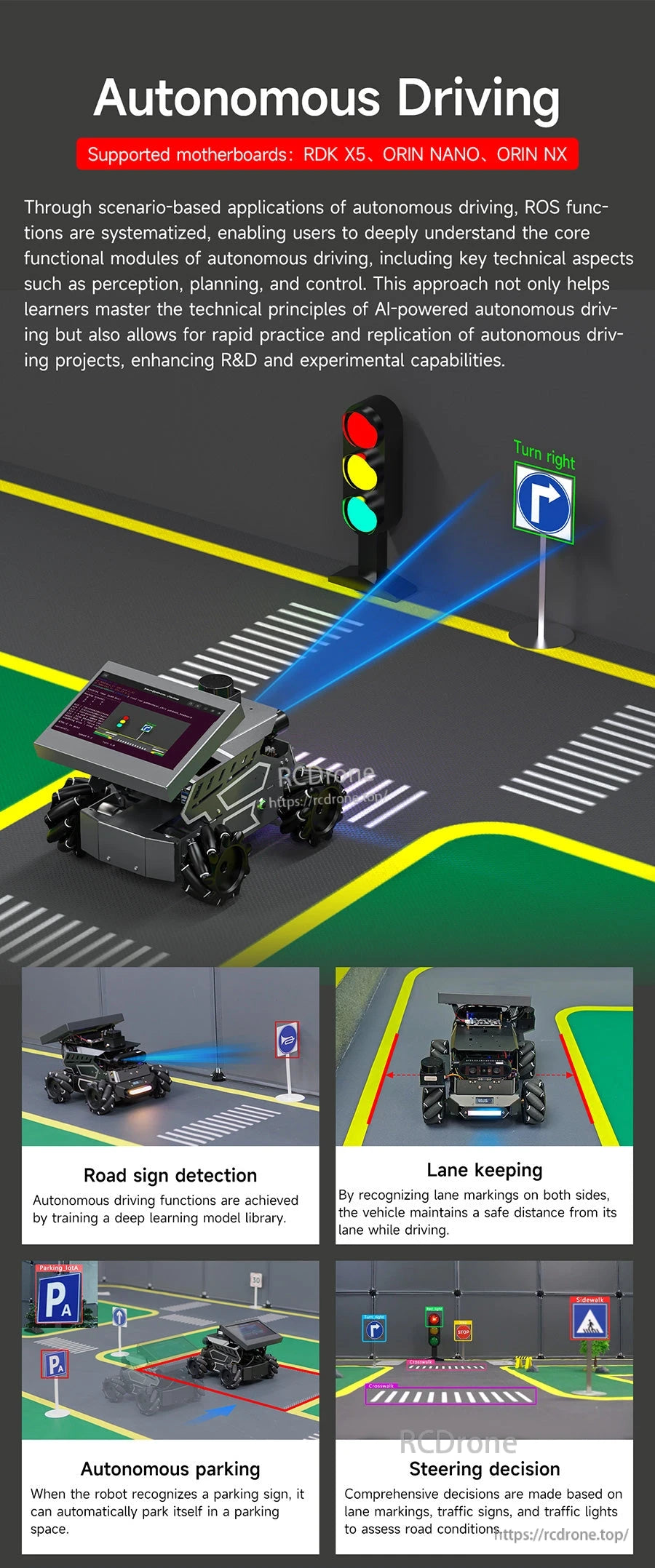
स्वायत्त ड्राइविंग व्यवहारों में लेन कीपिंग, संकेत पहचान, पार्किंग रूटीन, और स्टीयरिंग निर्णय शामिल हैं।

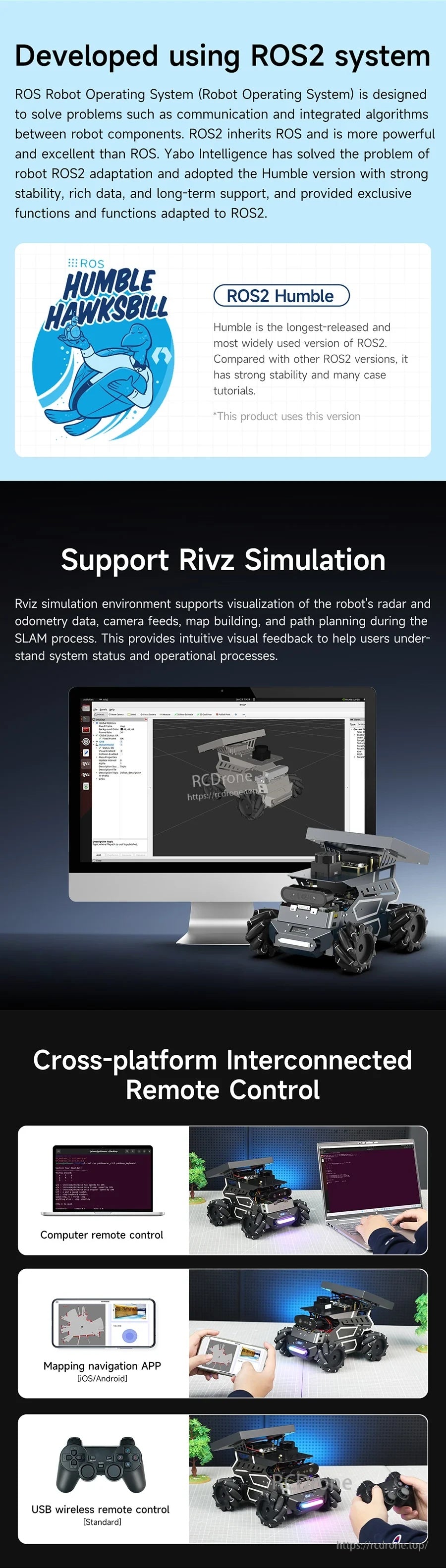
ROS2 Humble विकास RViz सिमुलेशन और परीक्षण और डेमो के लिए लचीले रिमोट-कंट्रोल विकल्पों के साथ जोड़ा जाता है।

एक विस्फोटित दृश्य गहराई कैमरा, LiDAR, वैकल्पिक डिस्प्ले, और ऑनबोर्ड लाइटिंग जैसे मॉड्यूलर ऐड-ऑन को उजागर करता है।
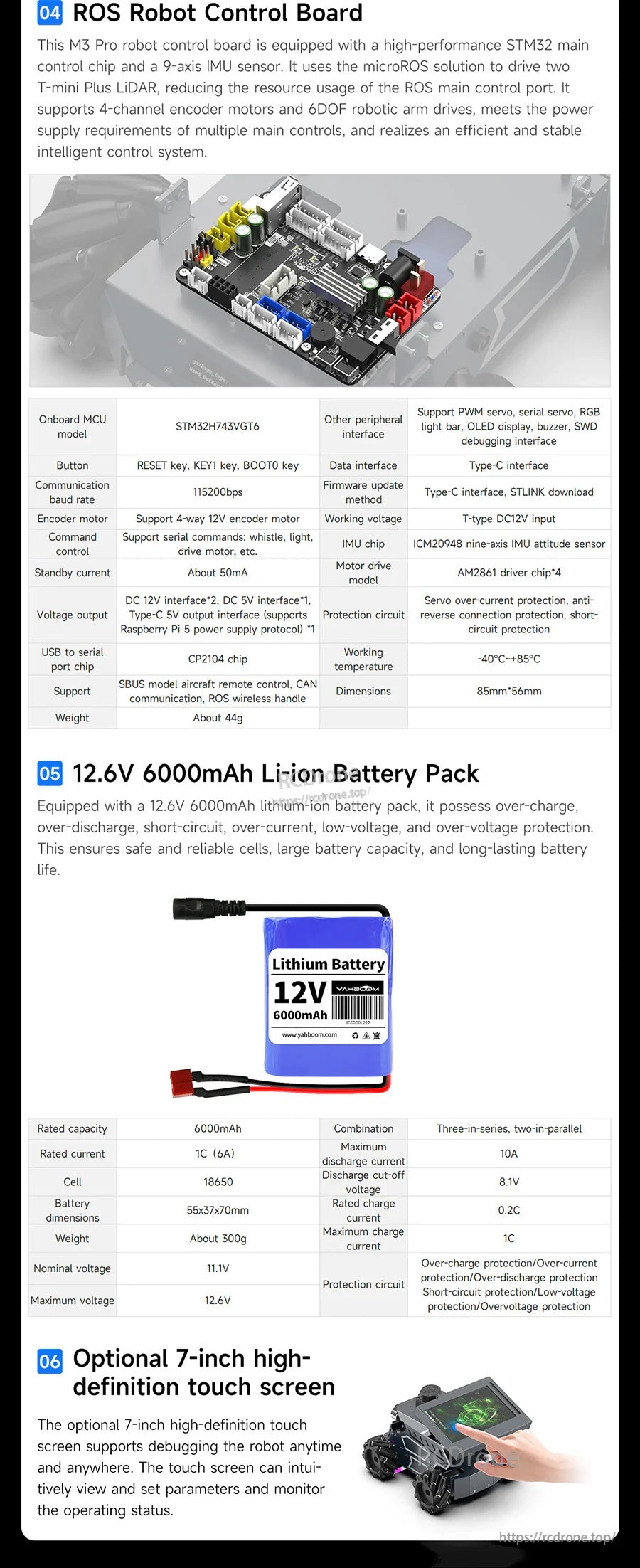
ROS रोबोट नियंत्रण बोर्ड बंडल में 12V 6000mAh ली-आयन बैटरी पैक शामिल है और इंटरैक्टिव नियंत्रण के लिए एक वैकल्पिक 7-इंच एचडी टचस्क्रीन का समर्थन करता है।
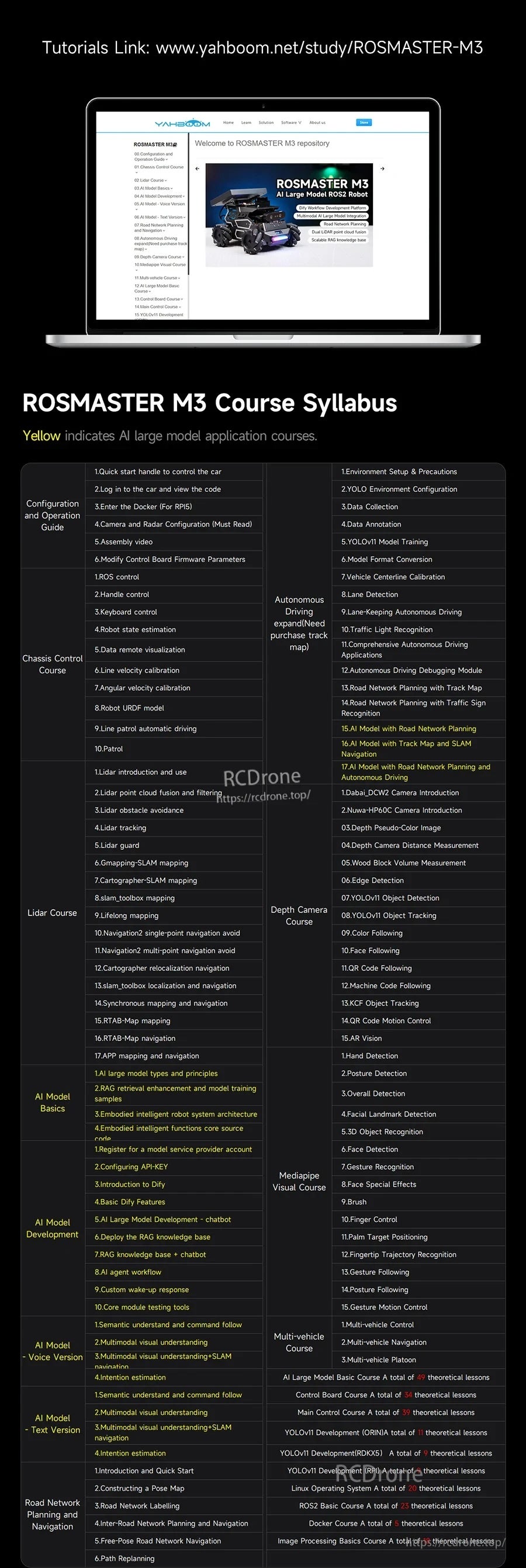
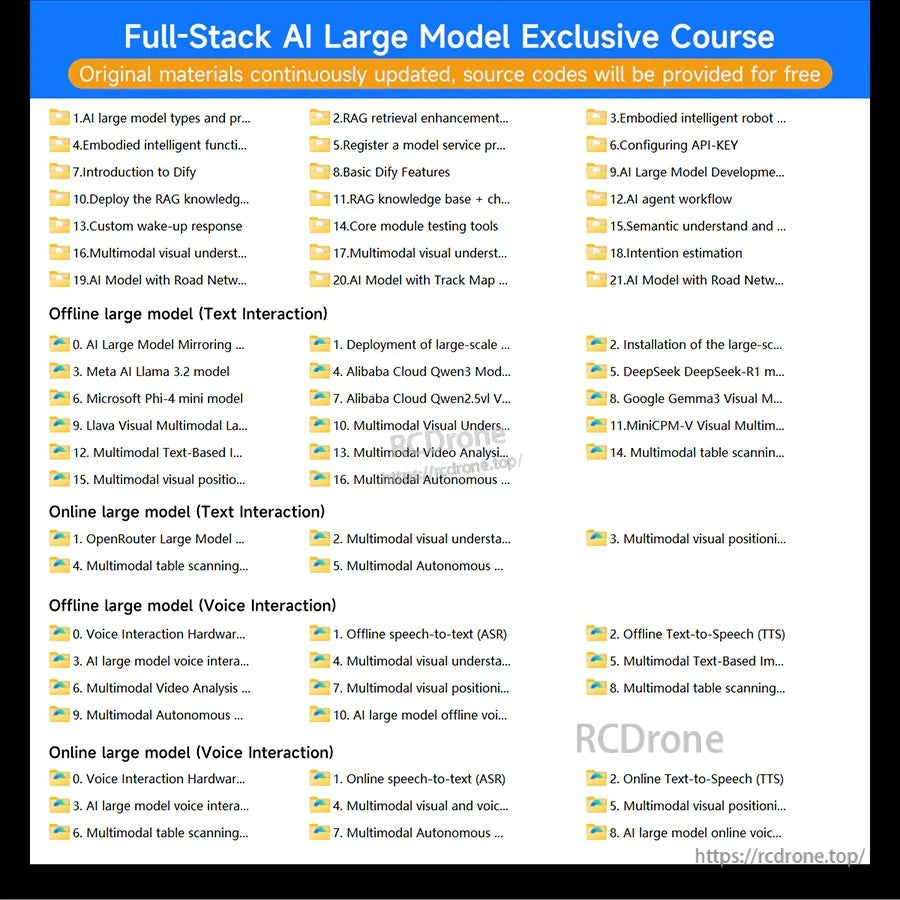
ROSMASTER M3 पाठ्यक्रम पाठ्यक्रम में ROS2 AI रोबोट परियोजनाओं के लिए वीडियो पाठ मॉड्यूल और सीखने का रोडमैप शामिल है।
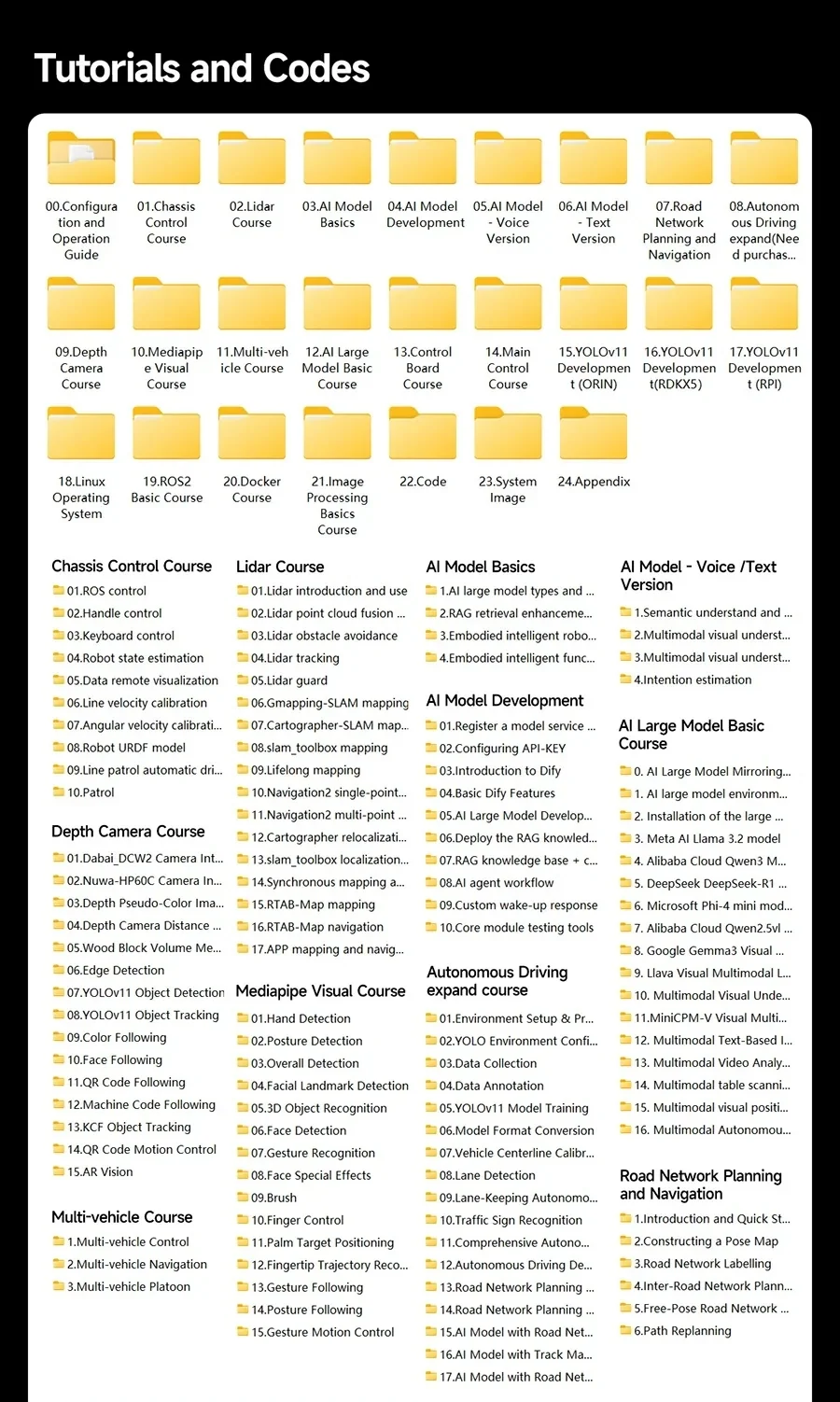
ROSMASTER M3 पैकेज में चेसिस नियंत्रण, LiDAR सेटअप, और AI मॉडल विकास विषयों को कवर करने वाले संगठित ट्यूटोरियल और कोड फ़ोल्डर शामिल हैं।
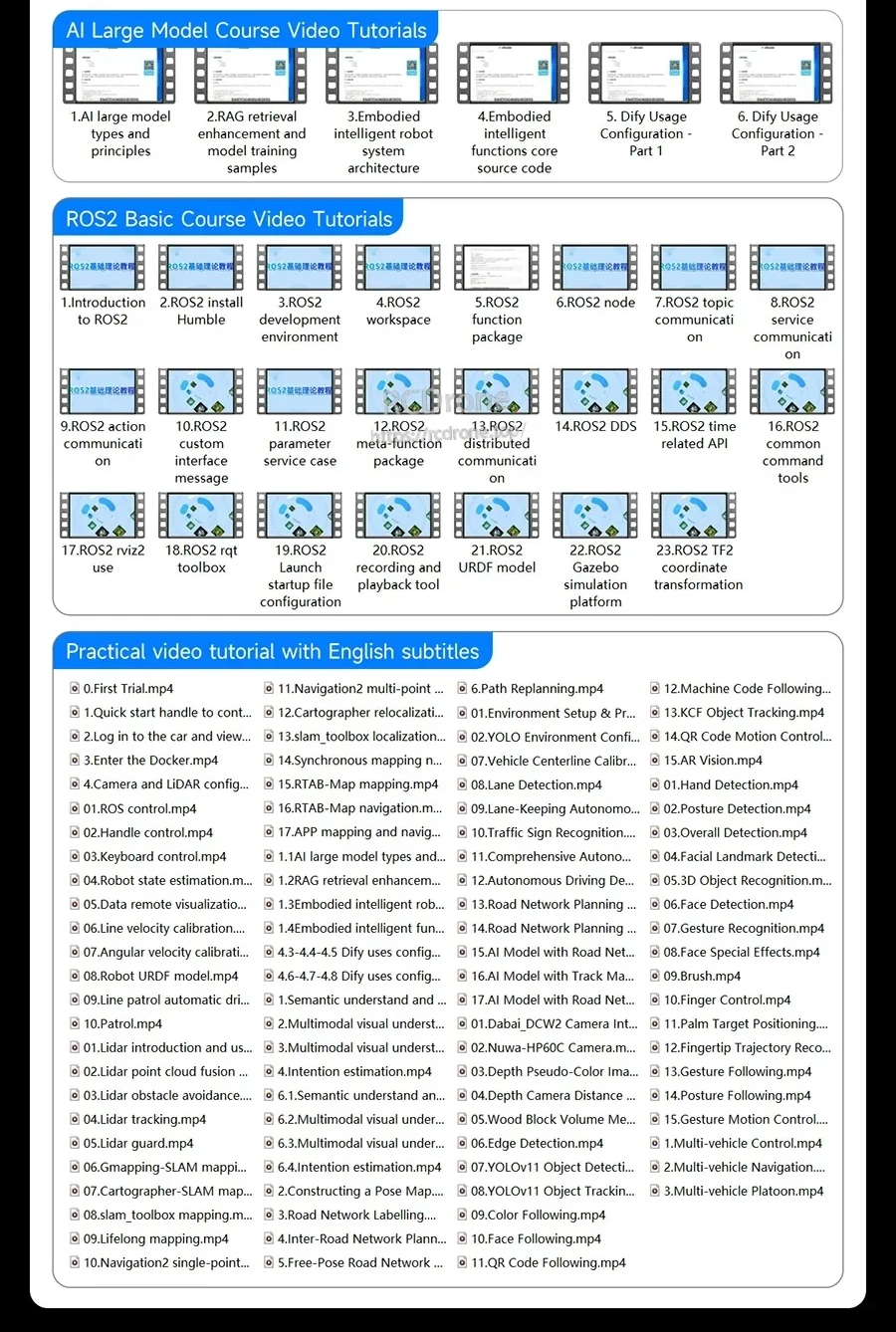
ROSMASTER M3 सीखने के संसाधन AI बड़े मॉडल ट्यूटोरियल, ROS2 बुनियादी पाठ्यक्रम वीडियो, और सेटअप और विकास के लिए मार्गदर्शन करने वाली व्यावहारिक सामग्री को रेखांकित करते हैं।
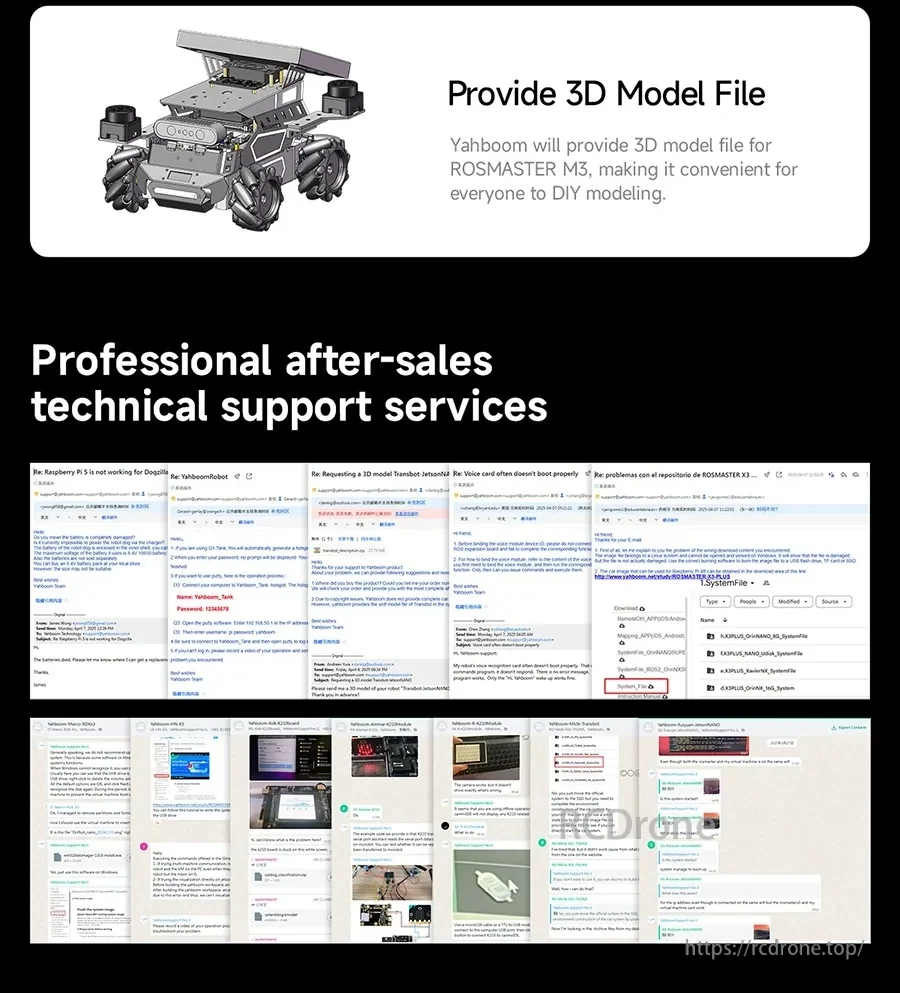
Yahboom DIY मॉडलिंग और सेटअप में मदद करने के लिए ROSMASTER M3 3D मॉडल फाइलें और बिक्री के बाद तकनीकी समर्थन प्रदान करता है।

ROSMASTER M3 प्लेटफ़ॉर्म विकल्पों में एकरमैन स्टीयरिंग, RGBD/USB कैमरा विकल्प, 0.91-इंच OLED डिस्प्ले, और कई नियंत्रण बोर्ड चयन शामिल हैं।
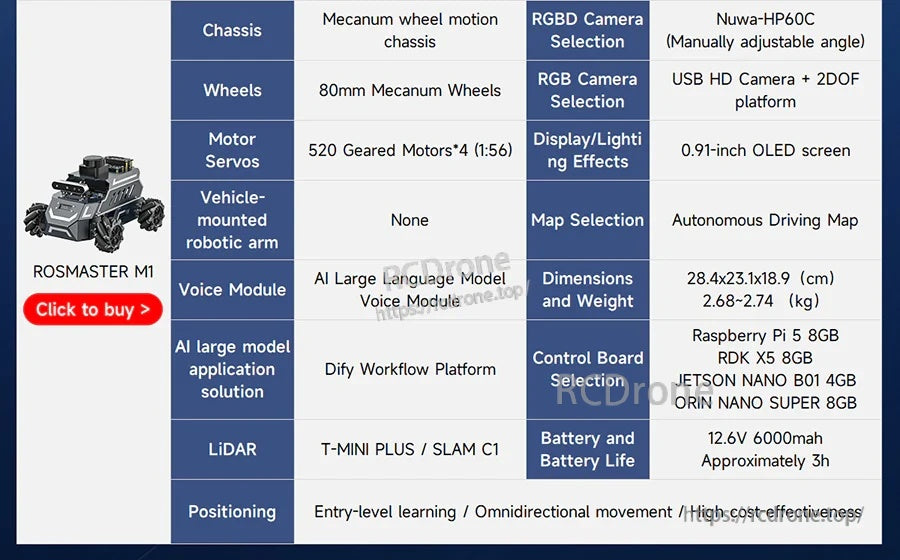
ROSMASTER M3 एक मेकानम-व्हील चेसिस का उपयोग करता है जिसमें 80 मिमी के पहिये होते हैं और AI वॉयस मॉड्यूल, कई कंट्रोलर बोर्ड, और 12.6V 6000mAh बैटरी जैसे विकल्प सूचीबद्ध हैं।
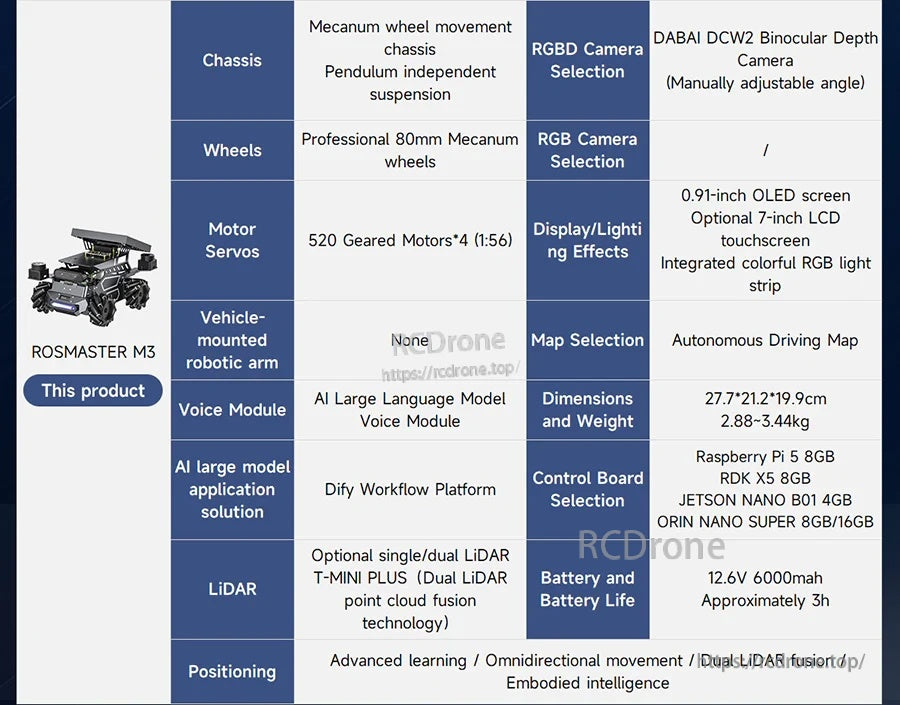
ROSmaster M3 एक मेकानम-व्हील चेसिस का उपयोग करता है जिसमें कई कैमरा और कंट्रोल बोर्ड विकल्प होते हैं, साथ ही मोबाइल निर्माण के लिए 12.6V 6000mAh बैटरी पैक होता है।
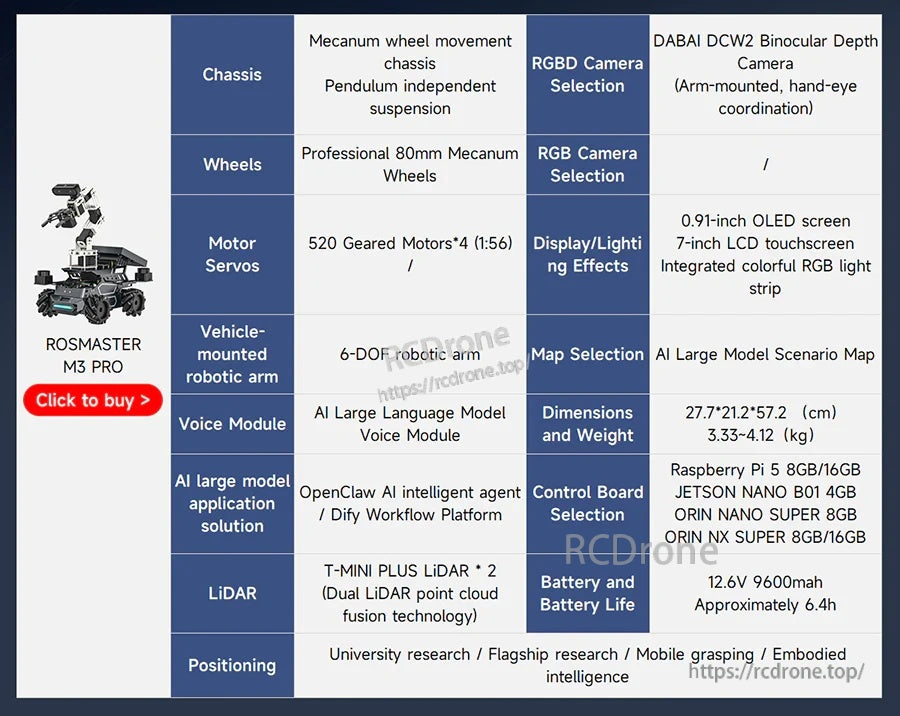
ROSMaster M3 PRO एक मेकानम-व्हील चेसिस को 6‑DOF रोबोटिक आर्म के साथ जोड़ता है और LiDAR, डेप्थ कैमरा, और Raspberry Pi या Jetson कंट्रोल बोर्ड का समर्थन करता है।
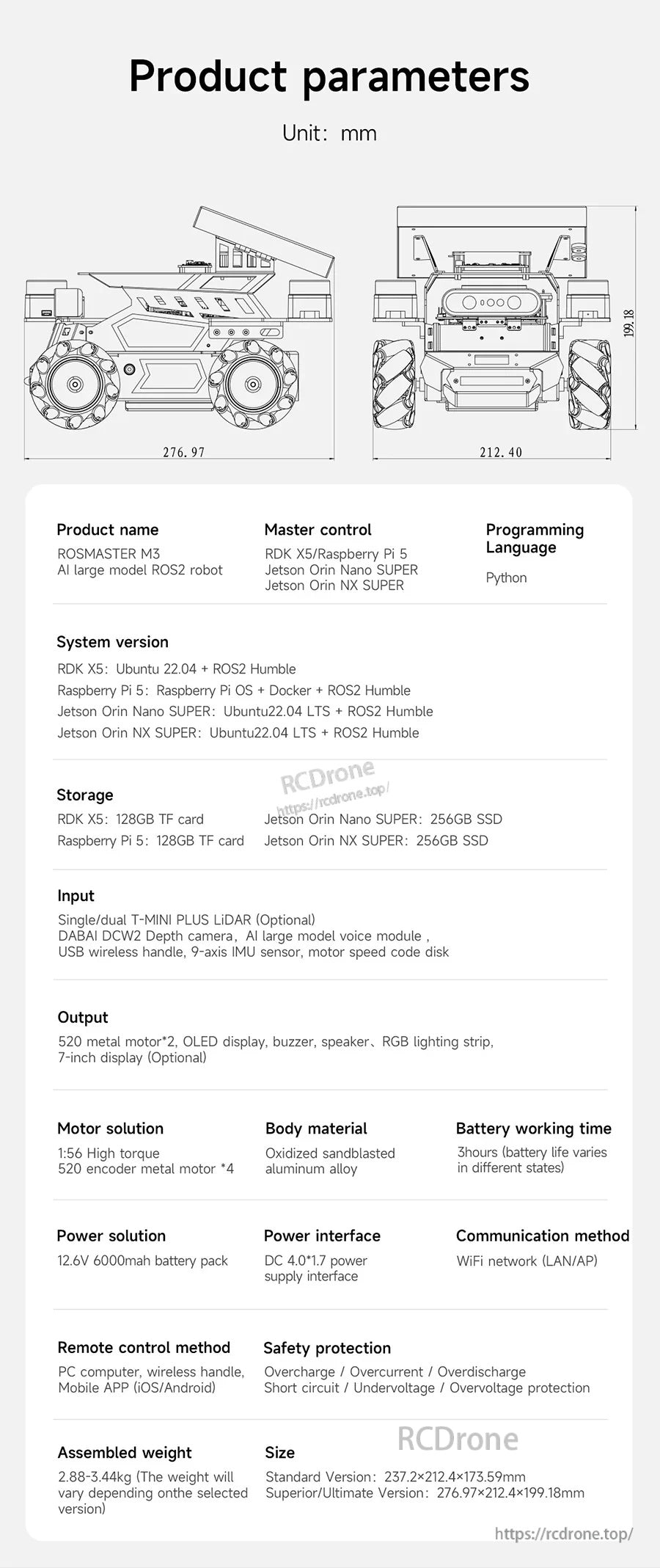
ROSMASTER M3 विनिर्देश पत्र में आयाम चित्र और प्रमुख विवरण शामिल हैं जैसे कि ROS2 समर्थन और Python प्रोग्रामिंग।
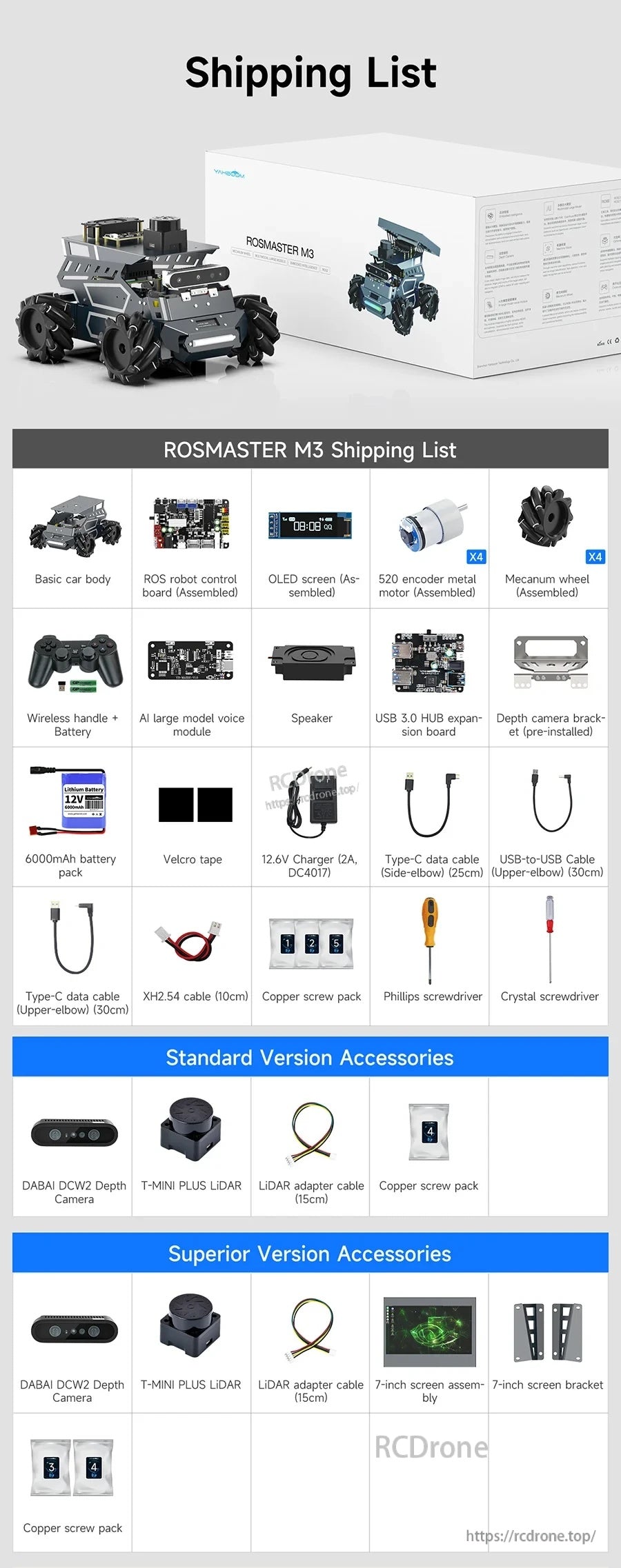
ROSMASTER M3 किट में रोबोट चेसिस के साथ मुख्य इलेक्ट्रॉनिक्स, सेंसर, और असेंबली के लिए आवश्यक केबल और सहायक उपकरण शामिल हैं।
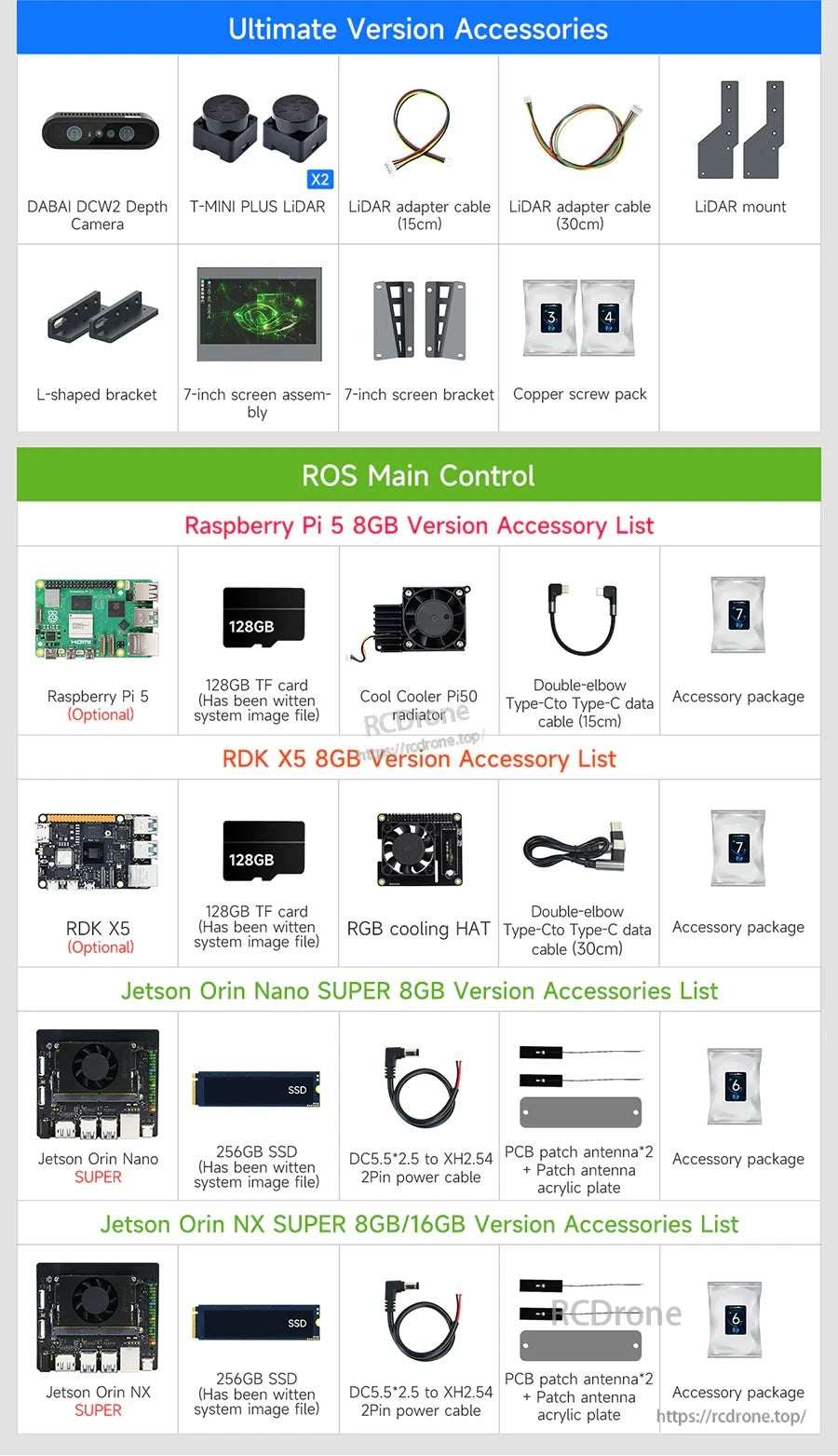
ROSMASTER M3 एक्सेसरी लाइनअप में LiDAR और गहराई कैमरा मॉड्यूल, 7-इंच स्क्रीन ब्रैकेट्स के साथ, माउंट्स, और विभिन्न मुख्य नियंत्रण बोर्ड बंडल शामिल हैं।
Related Collections






























