SLAMTEC ऑरोरा S एआई स्पेशियल परसेप्शन सिस्टम ROS1/ROS2 मैपिंग, नेविगेशन & 3D रिकंस्ट्रक्शन के लिए
SLAMTEC ऑरोरा S एआई स्पेशियल परसेप्शन सिस्टम ROS1/ROS2 मैपिंग, नेविगेशन & 3D रिकंस्ट्रक्शन के लिए
Slamtec
पिकअप उपलब्धता लोड नहीं की जा सकी
अवलोकन
SLAMTEC Aurora S एक एकीकृत AI स्थानिक धारणा प्रणाली है जिसे अवतारित बुद्धिमत्ता के लिए डिज़ाइन किया गया है, जो रोबोटिक्स और बुद्धिमान एजेंटों के लिए बॉक्स से बाहर 3D धारणा, मानचित्रण और अर्थपूर्ण समझ प्रदान करता है। दृष्टि, जड़त्वीय नेविगेशन, और SLAMTEC की स्व-विकसित AI-VSLAM तकनीकों को एकीकृत करके, यह सीधे मानचित्रण और स्थिति निर्धारण परिणामों को आउटपुट करता है और मानचित्रण और नेविगेशन कार्यप्रवाहों के लिए ROS1 और ROS2 का समर्थन करता है।
Aurora S SLAMTEC की Insight Series का हिस्सा है। इसे एकीकृत करने और विकास की बाधाओं को कम करने और बुद्धिमान अनुप्रयोगों की तैनाती को तेज़ करने के लिए स्थिति में रखा गया है।
मुख्य विशेषताएँ
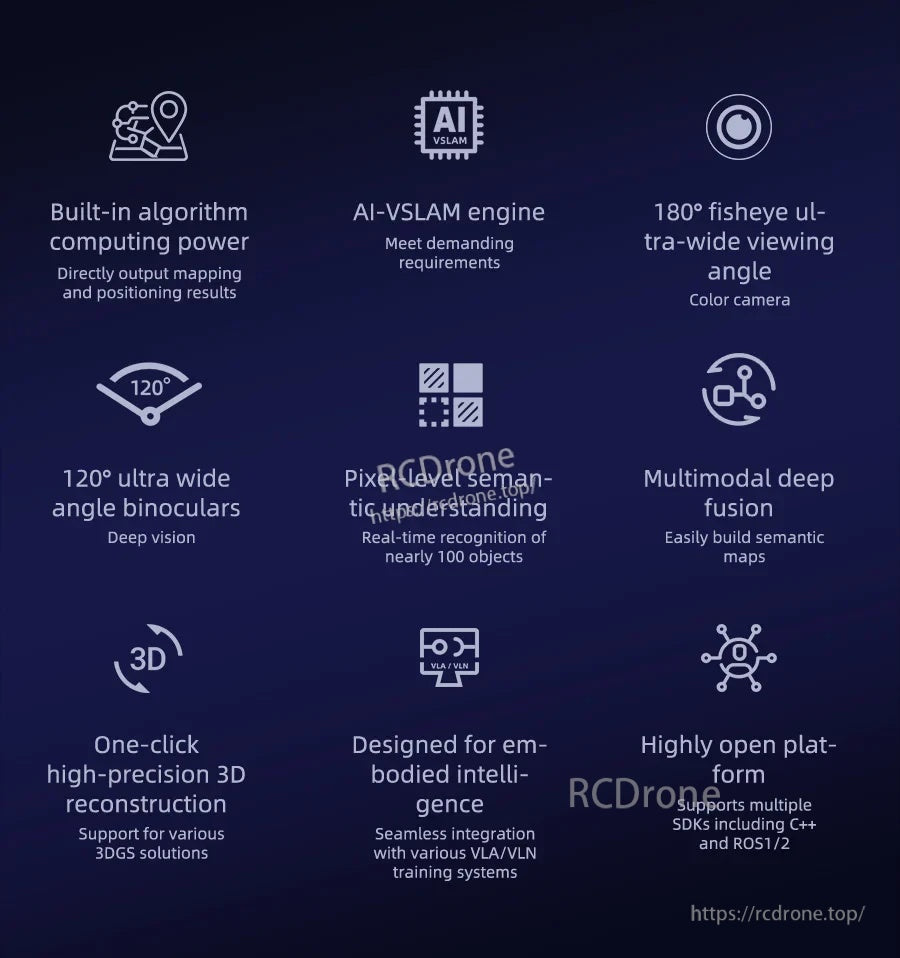
- निर्मित एल्गोरिदम गणना शक्ति सीधे मानचित्रण और स्थिति निर्धारण परिणामों को आउटपुट करने के लिए
- AI-VSLAM इंजन मांगलिक आवश्यकताओं को पूरा करने के लिए
- 180° फिशआई अल्ट्रा-वाइड व्यूइंग एंगल रंग कैमरा
- 120° अल्ट्रा-वाइड एंगल बाइनोकुलर डीप विजन
- पिक्सेल-स्तरीय सेमांटिक समझ लगभग 100 वस्तुओं की वास्तविक समय पहचान के लिए
- मल्टीमोडल डीप फ्यूजन सेमांटिक मानचित्रों को आसानी से बनाने के लिए
- एक-क्लिक उच्च-सटीकता 3D पुनर्निर्माण, विभिन्न 3DGS समाधानों के लिए समर्थन के साथ
- शारीरिक बुद्धिमत्ता के लिए डिज़ाइन किया गया; विभिन्न VLA/VLN प्रशिक्षण प्रणालियों के साथ निर्बाध एकीकरण
- अत्यधिक ओपन प्लेटफ़ॉर्म; कई SDKs का समर्थन करता है जिसमें C++ और ROS1/ROS2
- रीयल-टाइम लूप क्लोजर सुधार और सटीक, विश्वसनीय पुनः-स्थानिकरण; बिल्ट-इन ऑनलाइन मानचित्र लूप क्लोजर पहचान और पुनः-स्थानिकरण क्षमताएँ, किसी बाहरी कंप्यूटिंग शक्ति की आवश्यकता नहीं; स्वचालित रूप से मानचित्रण त्रुटियों को सुधारता है
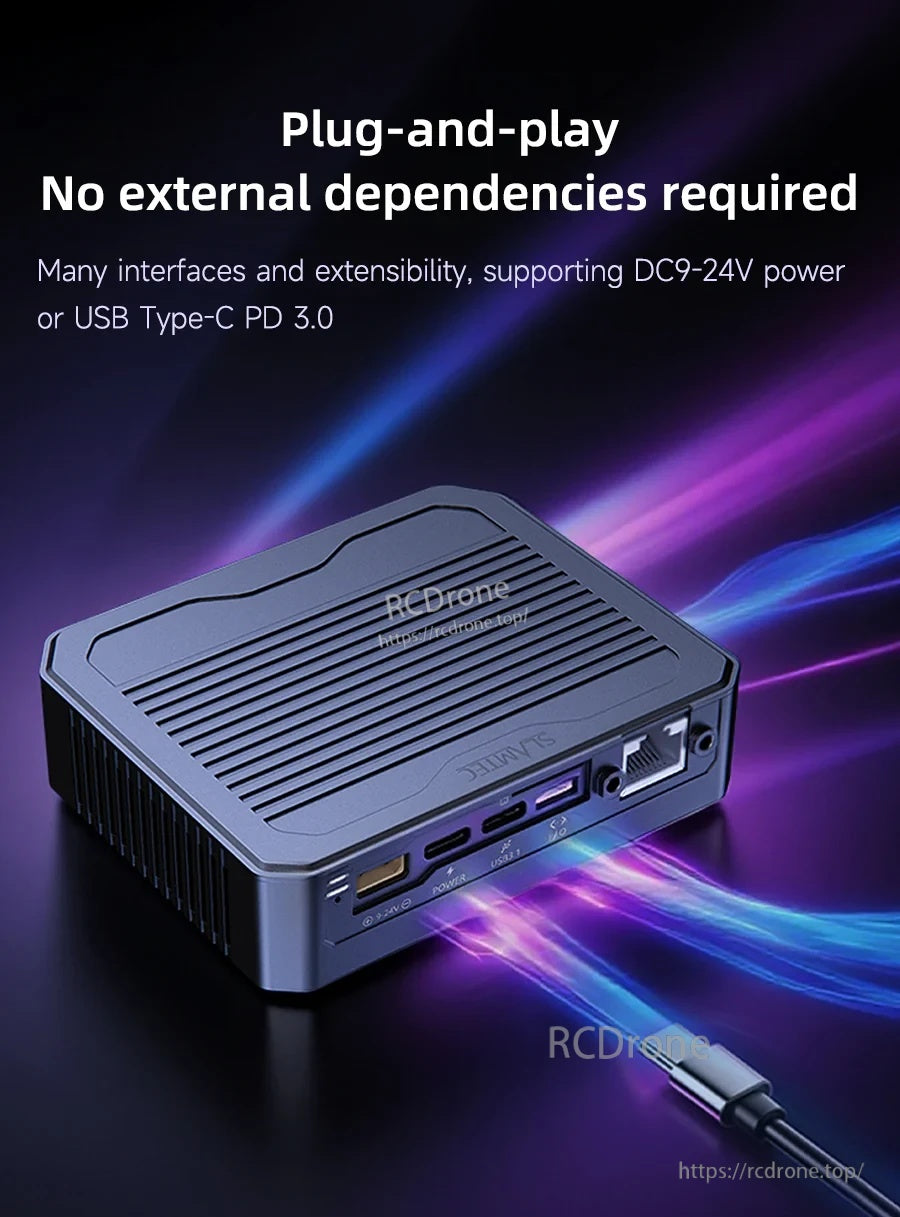
- प्लग-एंड-प्ले; कोई बाहरी निर्भरताएँ आवश्यक नहीं
आउटपुट और मानचित्रण क्षमताएँ
- 3D पॉइंट क्लाउड मानचित्र
- 6DoF स्थानिक स्थिति
- घनी गहराई मानचित्र
- वस्तु विभाजन मानचित्र
- सेमांटिक मानचित्र निर्माण
- प्रत्यक्ष रूप से एक 3D शेडेड पॉइंट क्लाउडआउटपुट करता है
- फोटो रियल मानचित्र (ऑरोरा-निर्मित घने बनावट मानचित्र)
- रीयल-टाइम एआई वस्तु पहचान और सेमांटिक विभाजन
विशेषताएँ
| उत्पाद | SLAMTEC ऑरोरा S (एकीकृत एआई स्थानिक धारणा प्रणाली) |
| रंगीन कैमरा देखने का कोण | 180° (फिशआई, अल्ट्रा-वाइड देखने का कोण) |
| दूरबीन गहरी दृष्टि | 120° (अल्ट्रा-वाइड कोण) |
| दृश्य क्षेत्र | 120° अल्ट्रा-वाइड दृश्य क्षेत्र; HFOV 120° |
| फ्रेम दर | 15FPS |
| सेमांटिक पहचान | लगभग 100 वस्तुओं की वास्तविक समय पहचान |
| पावर विकल्प | DC9-24V पावर या USB टाइप-C PD 3.0 |
| वायर्ड इंटरफेस (दिखाया गया) | ईथरनेट |
| SDK / सॉफ़्टवेयर समर्थन (दिखाया गया) | C++, ROS1, ROS2 |
दस्तावेज़
ट्यूटोरियल:SLAMTEC AuroraS
एकीकरण सहायता या प्री-सेल्स प्रश्नों के लिए, संपर्क करें [email protected] या जाएं https://rcdrone.top/ .
विवरण

Aurora S सामान्य ROS रोबोट प्लेटफार्मों के लिए उपयुक्त है ताकि मानचित्रण और नेविगेशन परियोजनाओं में तेजी से लाया जा सके।

Aurora S संवेदन और ऑनबोर्ड कंप्यूटिंग को जोड़ता है ताकि रोबोटों और एजेंटों के लिए उपयोग के लिए तैयार स्थानिक धारणा प्रदान की जा सके।
मुख्य क्षमताओं में ऑनबोर्ड AI‑VSLAM, अल्ट्रा-चौड़ी दृष्टि, घनी गहराई, अर्थपूर्ण समझ, और ओपन SDK एक्सेस शामिल हैं।

एक कॉम्पैक्ट, स्व-निहित मॉड्यूल जिसे सीधे मानचित्रण और स्थिति परिणाम आउटपुट करने के लिए डिज़ाइन किया गया है।

ROS1 और ROS2 के लिए मूल समर्थन Aurora S को मौजूदा मानचित्रण और नेविगेशन स्टैक्स में समायोजित करने में मदद करता है।
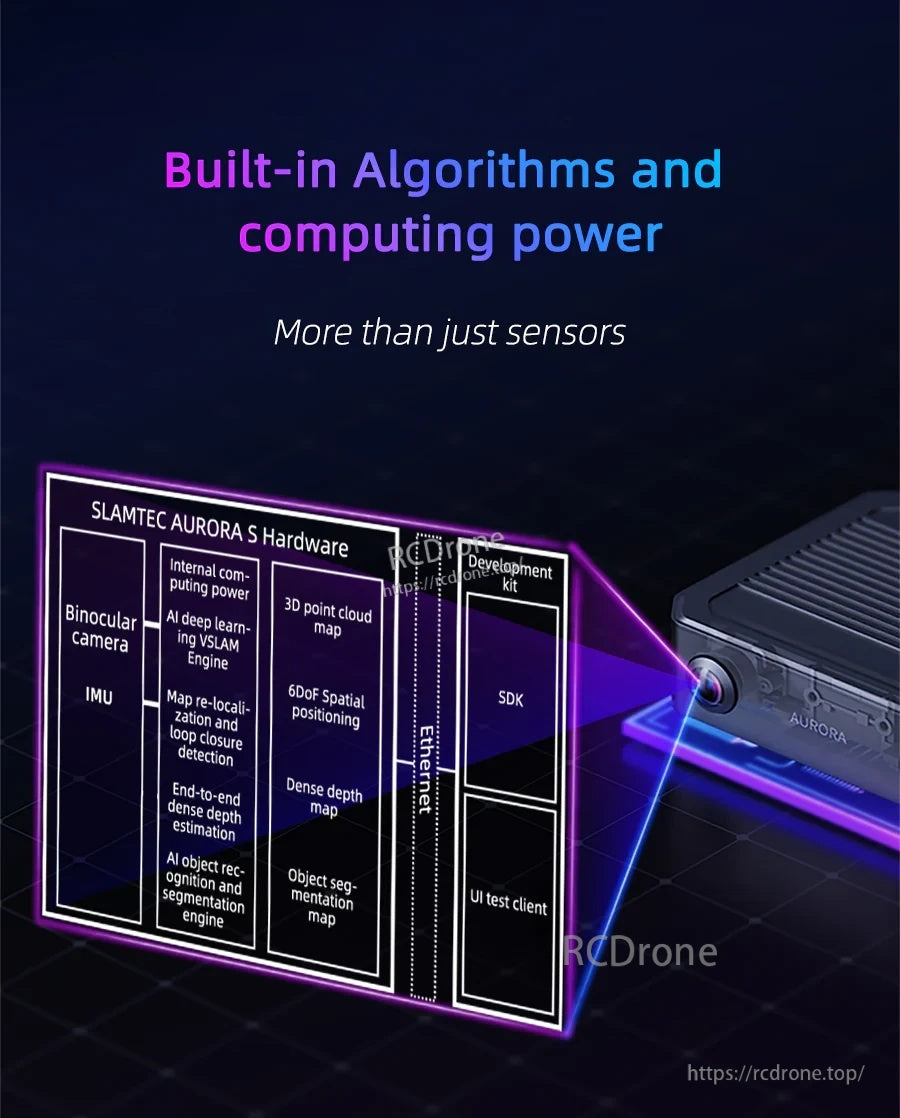
ऑनबोर्ड प्रोसेसिंग 6DoF पोज़, पॉइंट क्लाउड, गहराई मानचित्र, और विभाजन जैसे आउटपुट उत्पन्न करती है बिना अतिरिक्त कंप्यूट के।
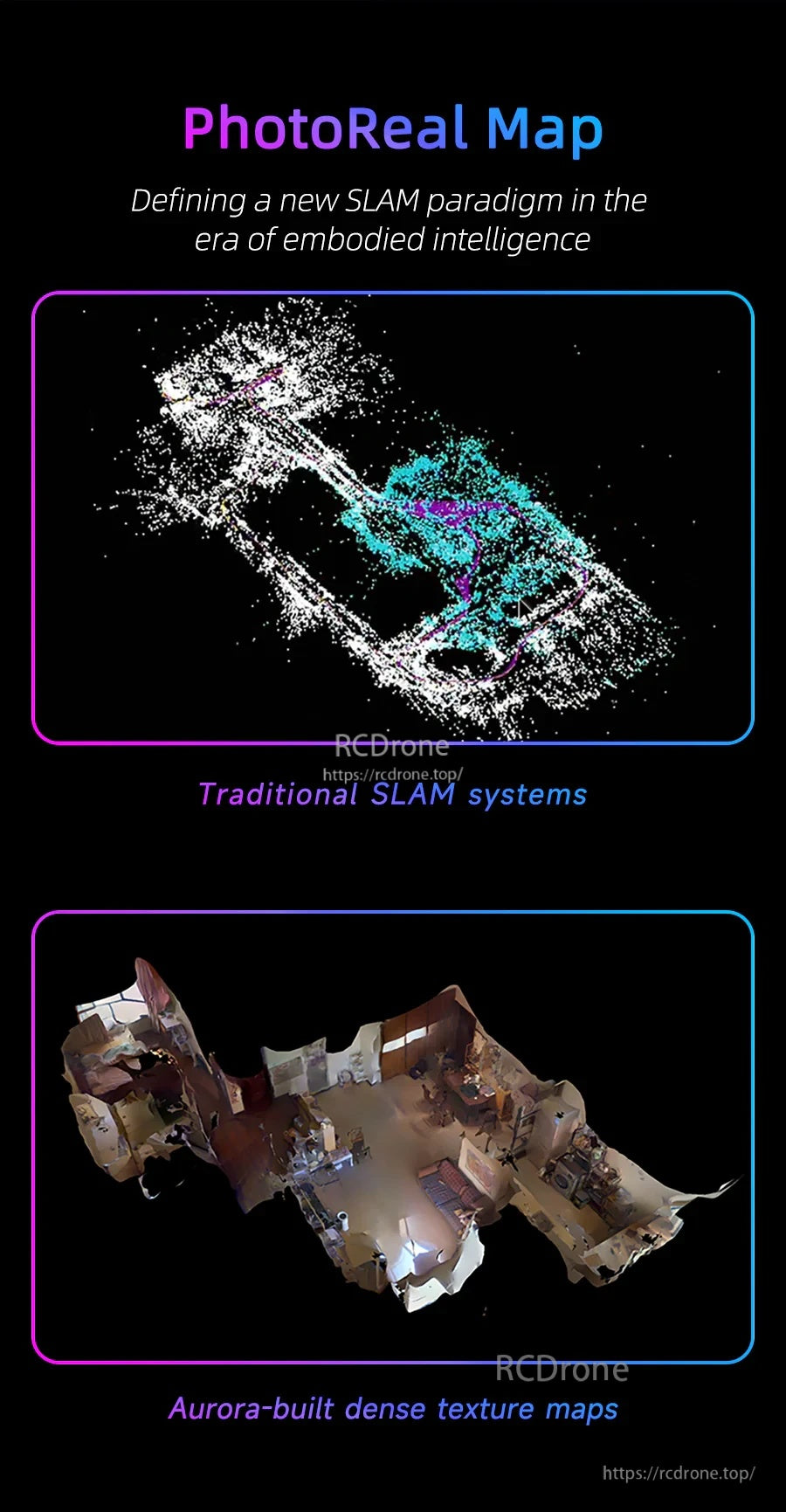
फोटो रियल मैप अधिक पठनीय, फोटो-यथार्थवादी दृश्य पुनर्निर्माण के लिए घने बनावट मानचित्रण जोड़ता है।
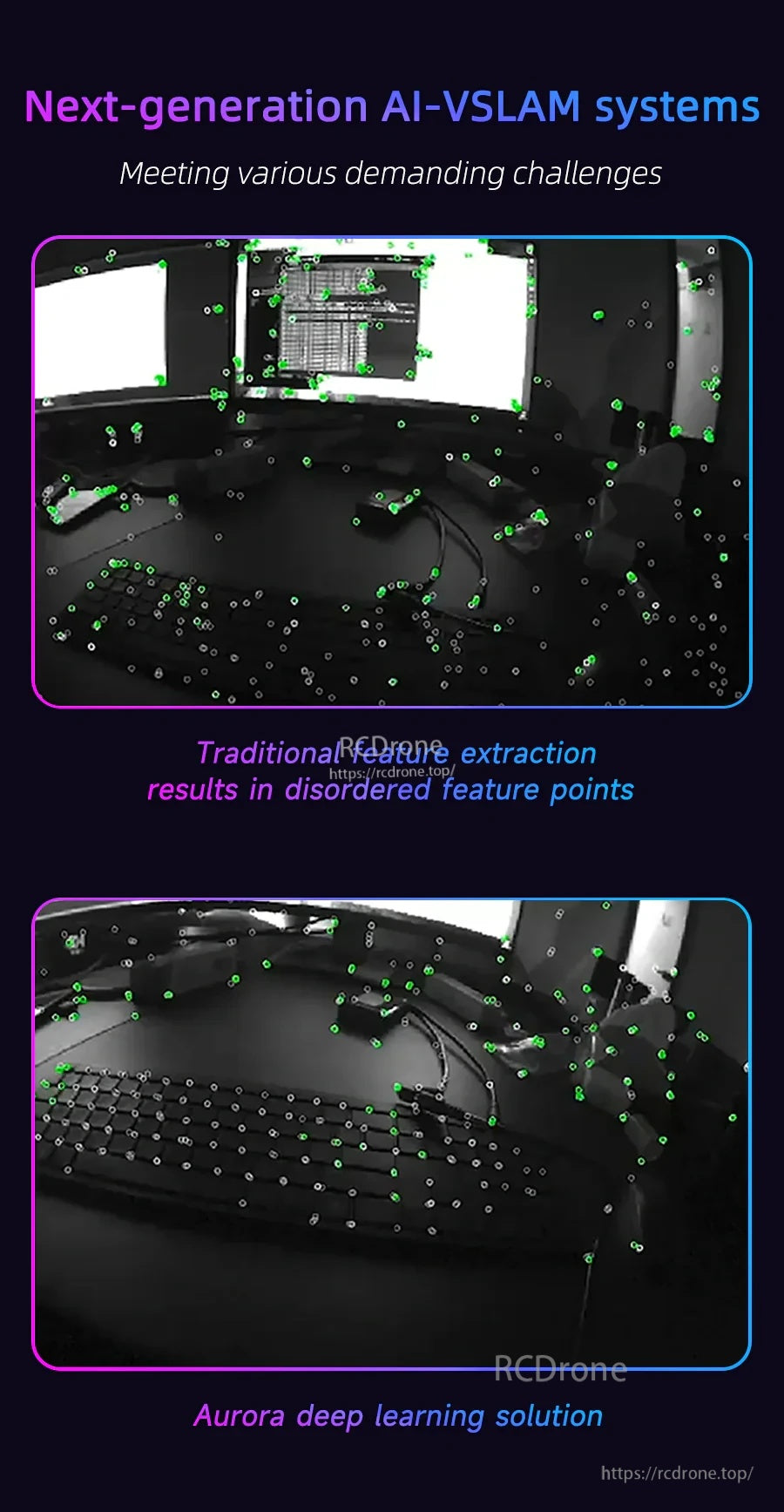
AI‑VSLAM को चुनौतीपूर्ण वातावरण में मजबूत रहने के लिए बनाया गया है जहाँ पारंपरिक फीचर निष्कर्षण संघर्ष कर सकता है।
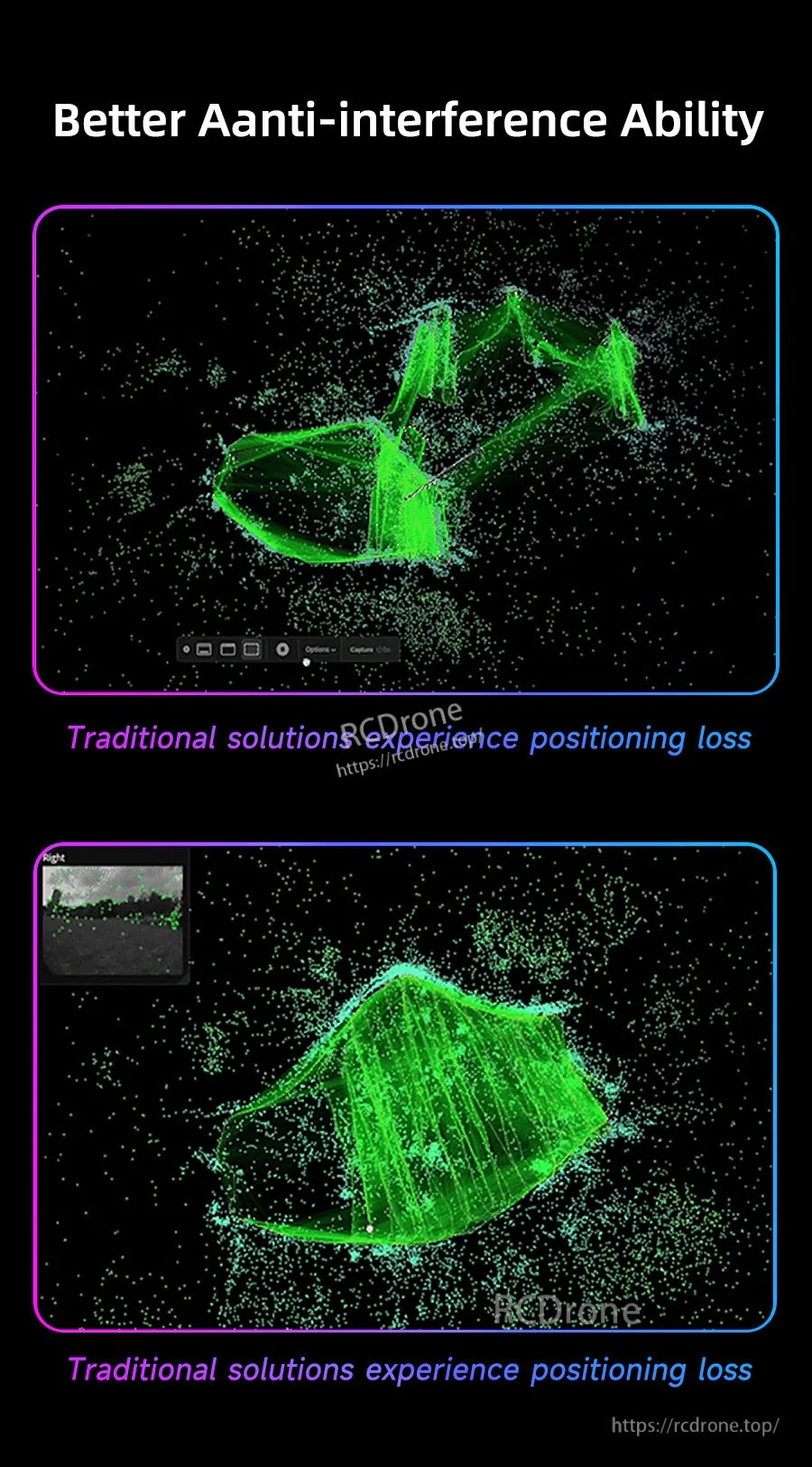
सुधरी हुई एंटी-इंटरफेरेंस प्रदर्शन जटिल परिस्थितियों में अधिक स्थिर ट्रैकिंग और मानचित्रण का समर्थन करता है।
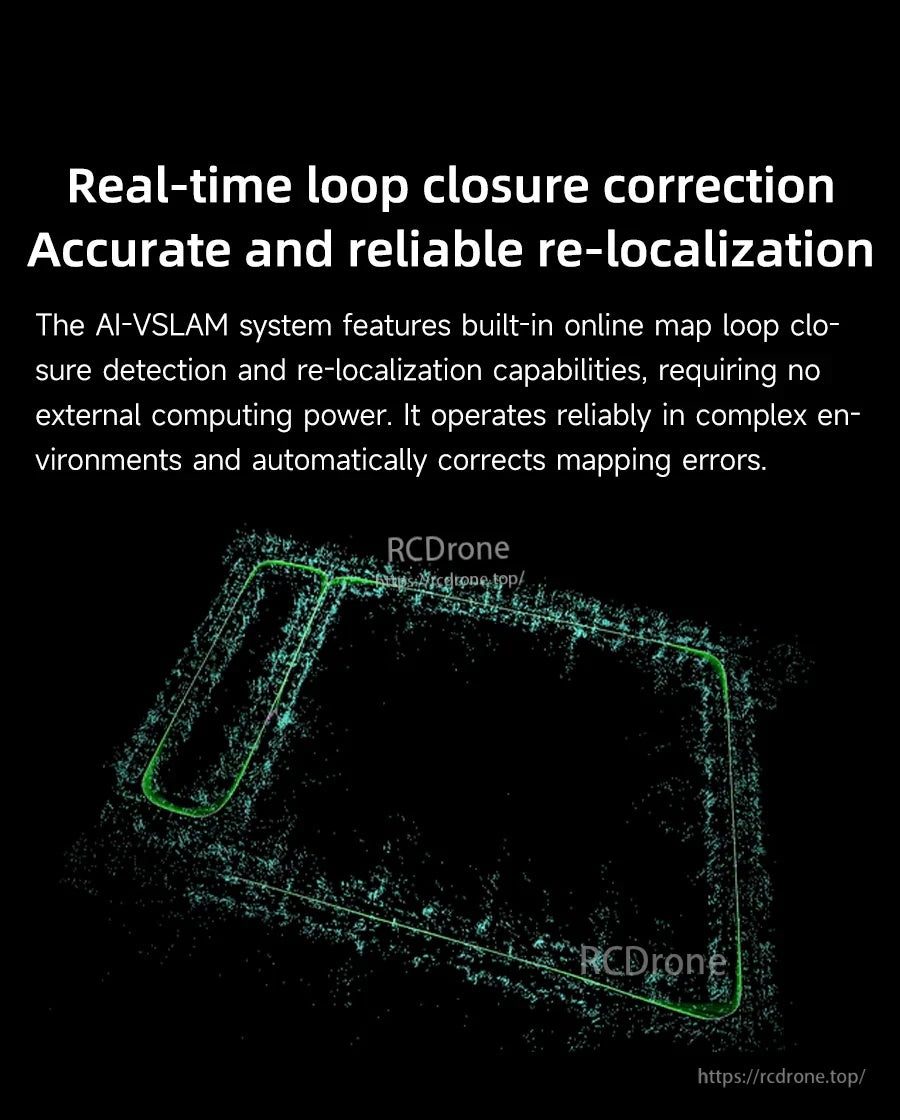
वास्तविक समय लूप क्लोजर और पुनः-स्थानीयकरण स्वचालित रूप से ड्रिफ्ट को सही करता है ताकि मानचित्र सुसंगत रहें।
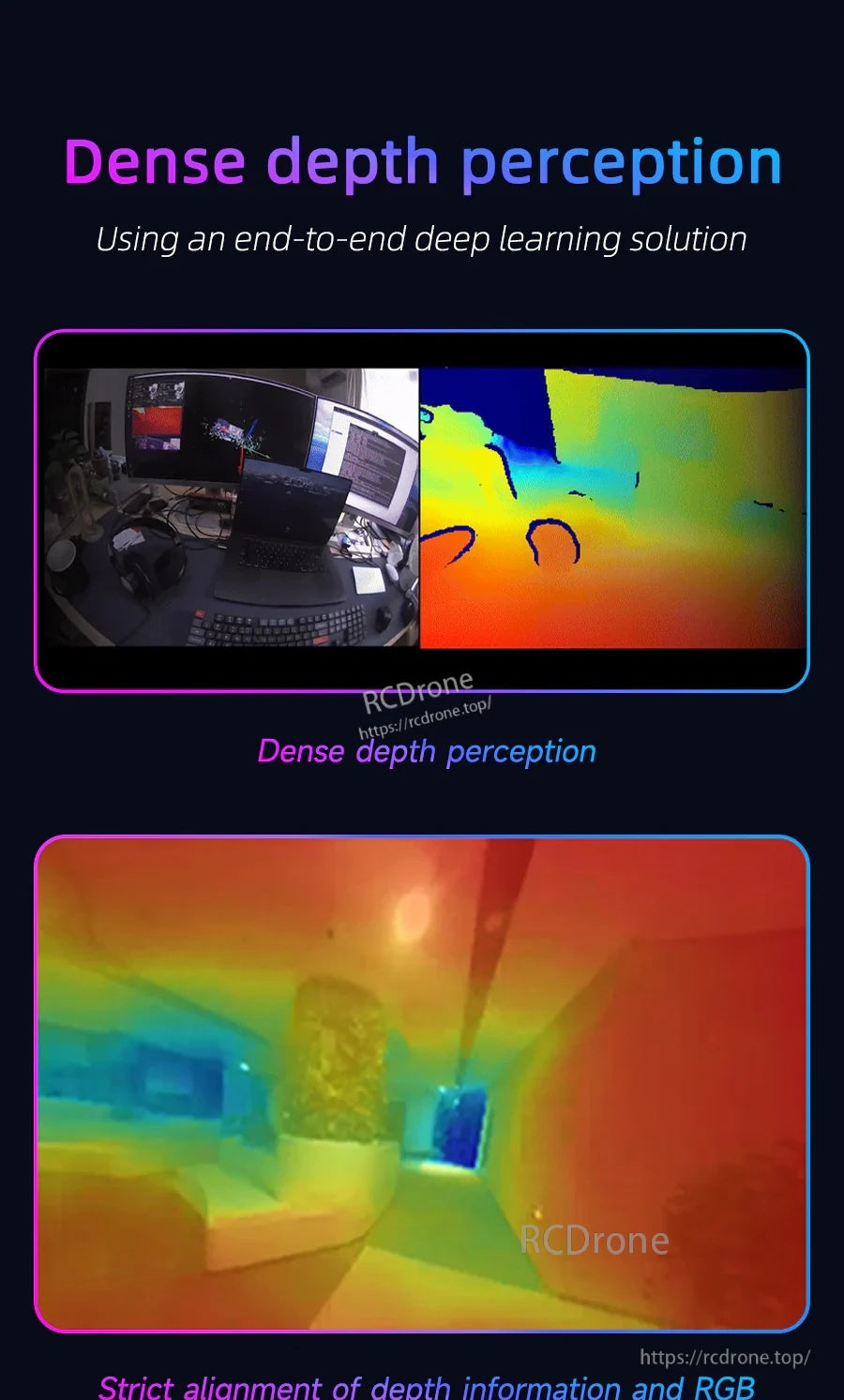
घना गहराई आउटपुट RGB डेटा के साथ संरेखित होता है ताकि विश्वसनीय बाधा समझ और 3D पुनर्निर्माण का समर्थन किया जा सके।
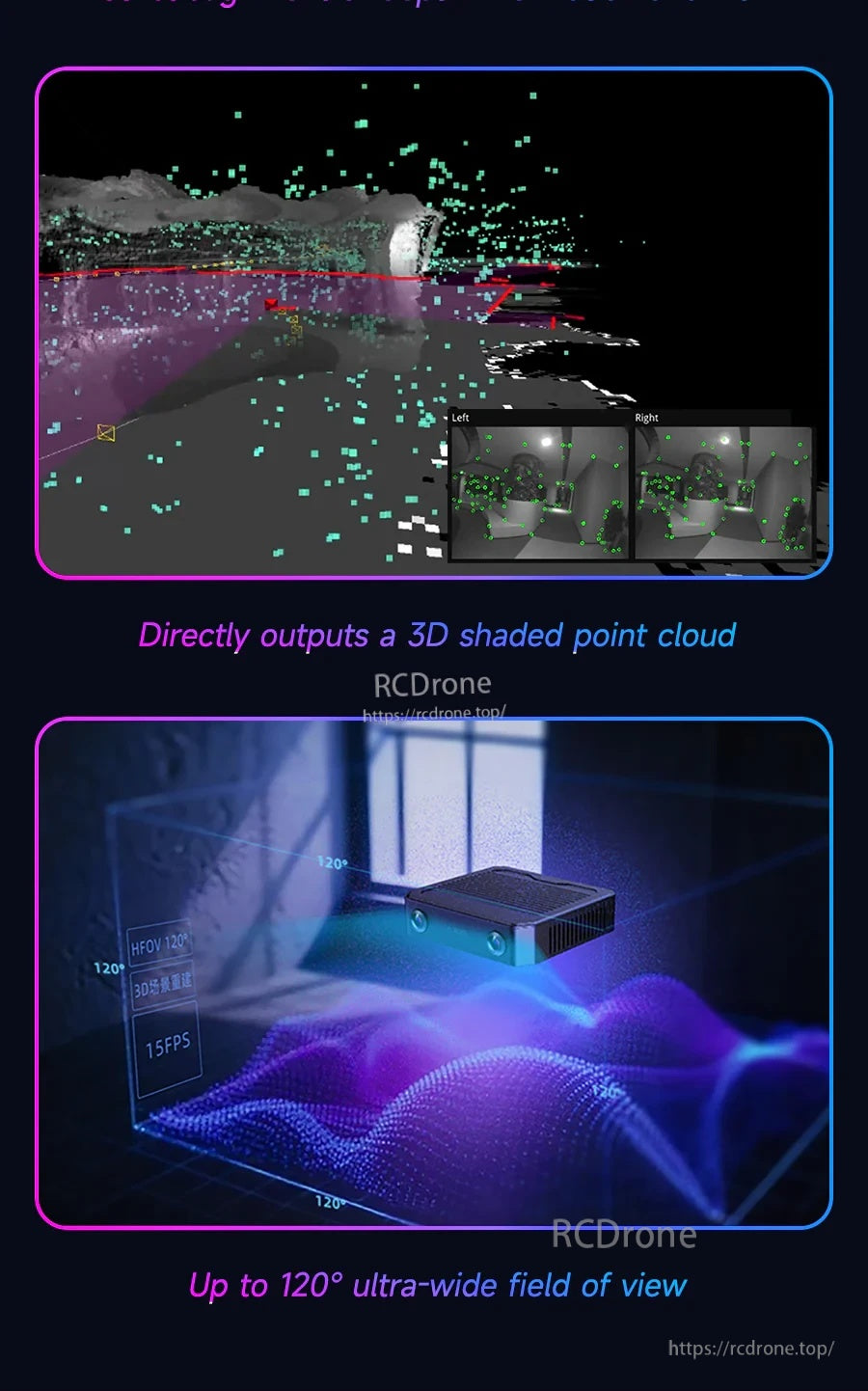
इनडोर नेविगेशन और स्कैनिंग के लिए चौड़े दृश्य क्षेत्र को बनाए रखते हुए छायांकित 3D पॉइंट क्लाउड उत्पन्न करें।
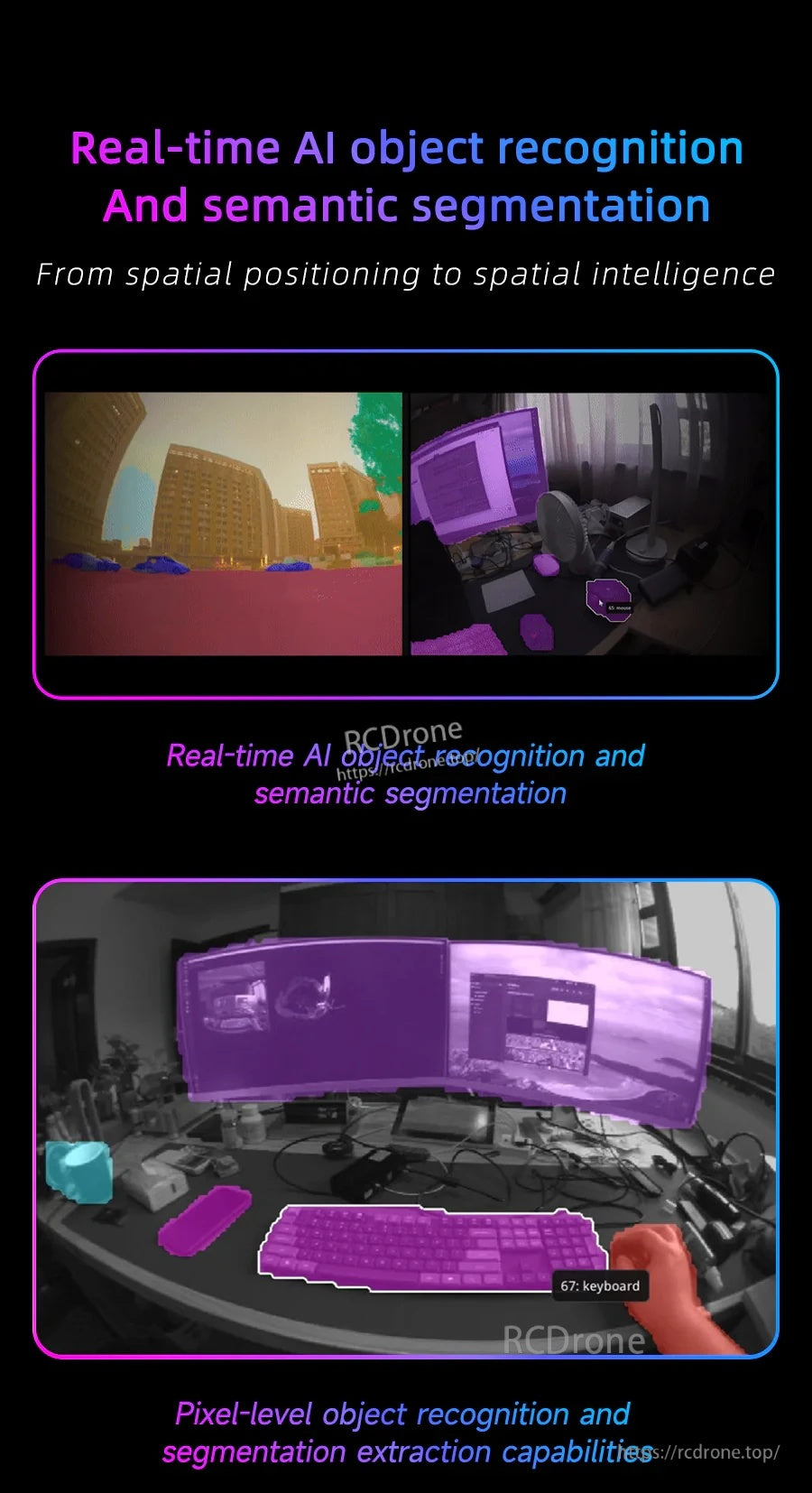
पिक्सेल-स्तरीय सेमांटिक विभाजन उच्च-स्तरीय सेमांटिक मानचित्र बनाने के लिए वास्तविक समय में पहचान सक्षम बनाता है।
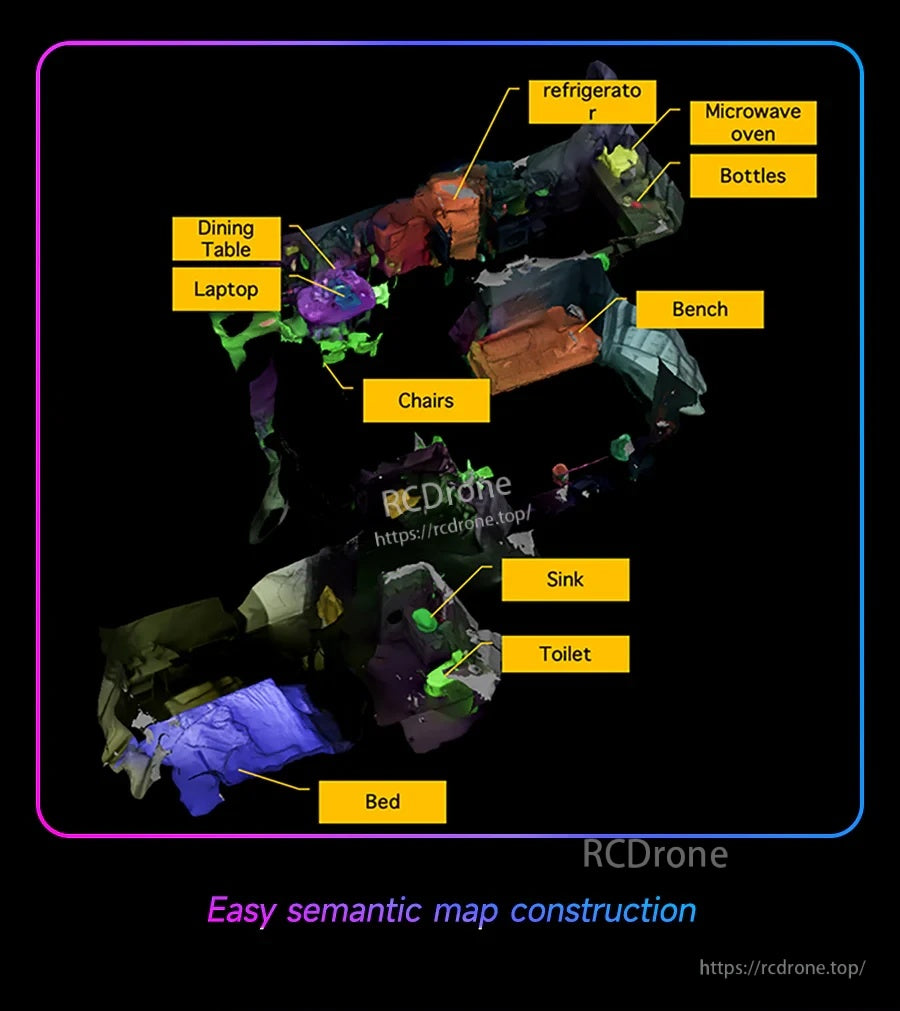
सेमांटिक मानचित्र निर्माण पर्यावरण में वस्तुओं को लेबल करता है ताकि स्मार्ट योजना और इंटरैक्शन का समर्थन किया जा सके।
सरल वायरिंग और लचीले पावर विकल्प प्रोटोटाइप और फील्ड रोबोट के लिए तैनाती को आसान बनाते हैं।
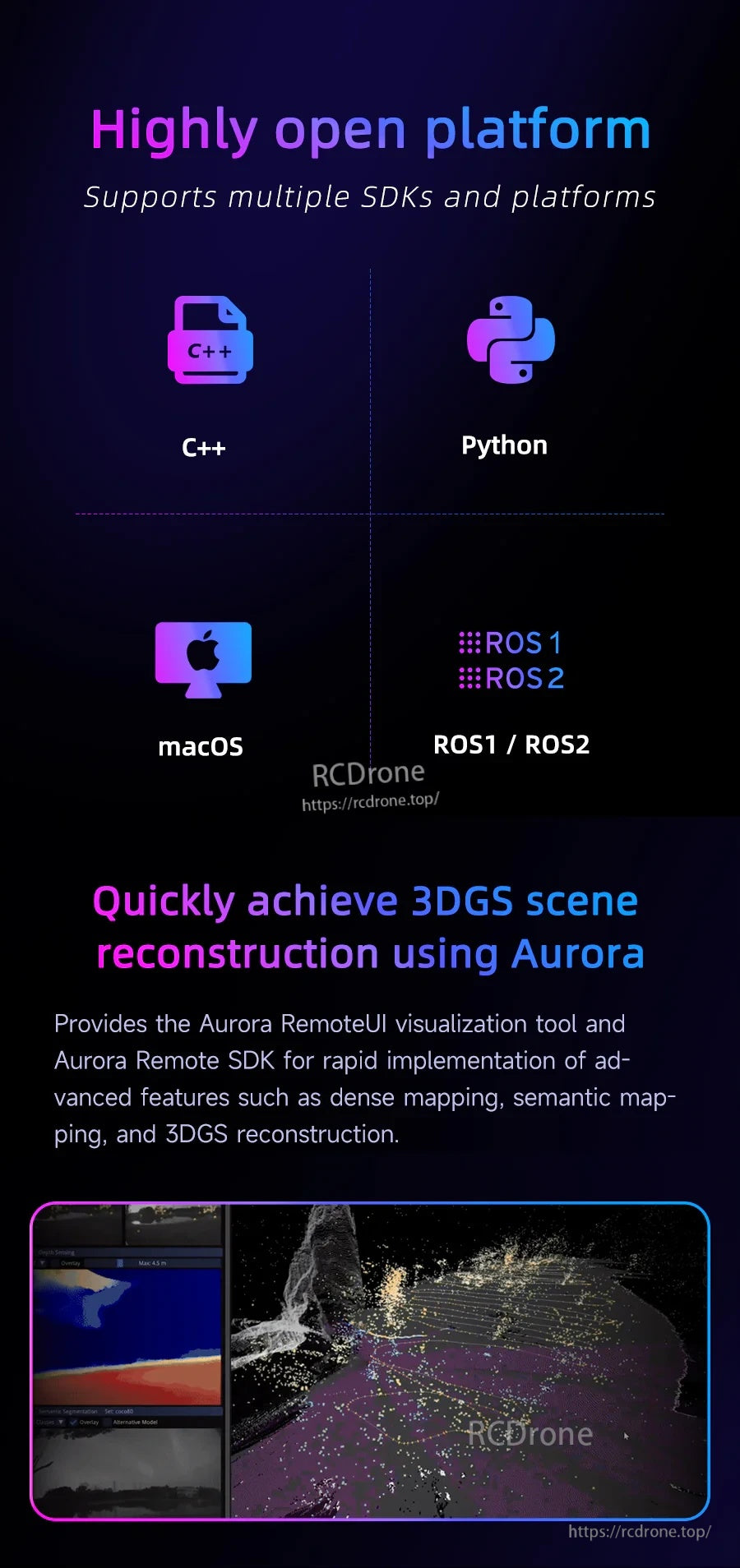
ROS और SDK विकल्पों के साथ एक अत्यधिक ओपन प्लेटफॉर्म Aurora S को मौजूदा उपकरणों और पाइपलाइनों से जोड़ने में मदद करता है।
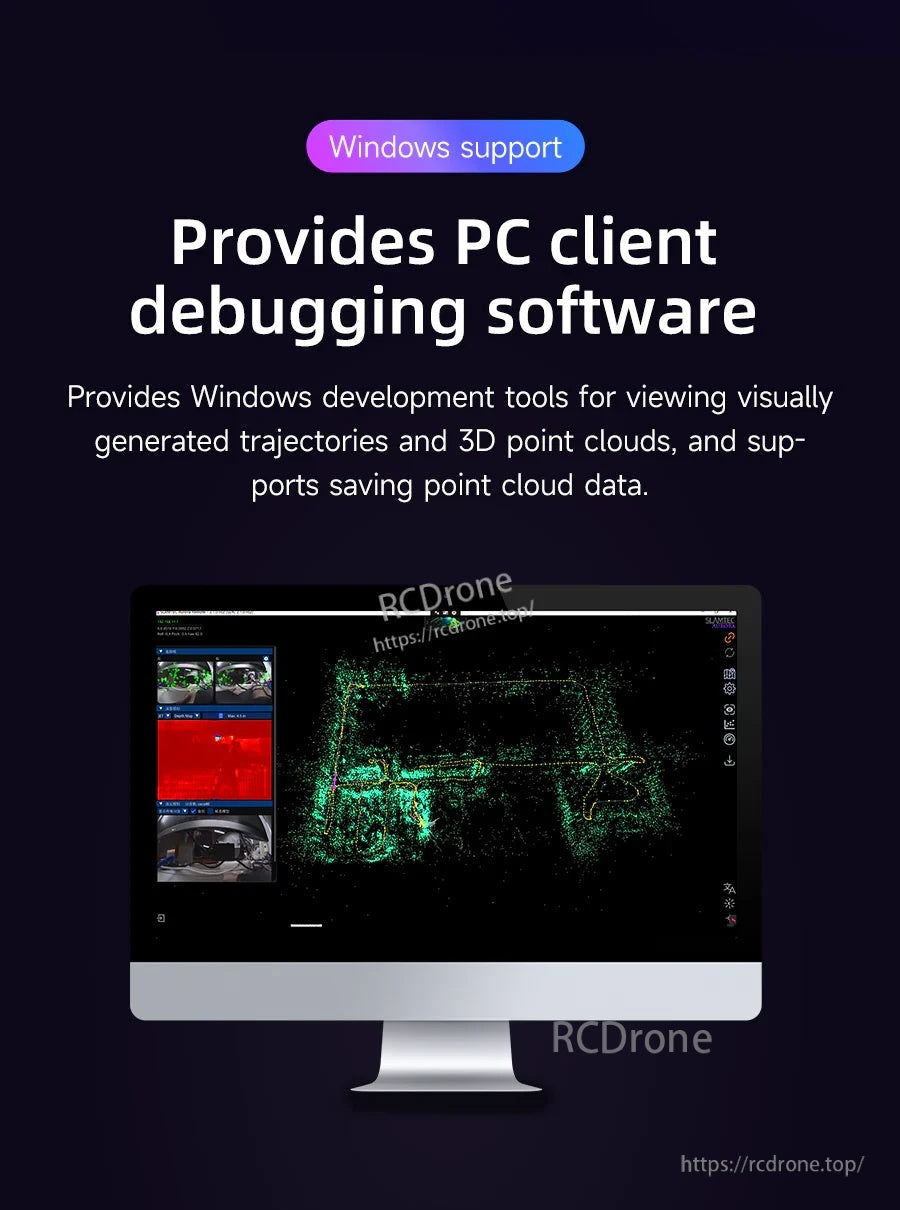
एक Windows क्लाइंट विकास के दौरान पथों और पॉइंट-क्लाउड परिणामों के दृश्यांकन और डिबगिंग का समर्थन करता है।
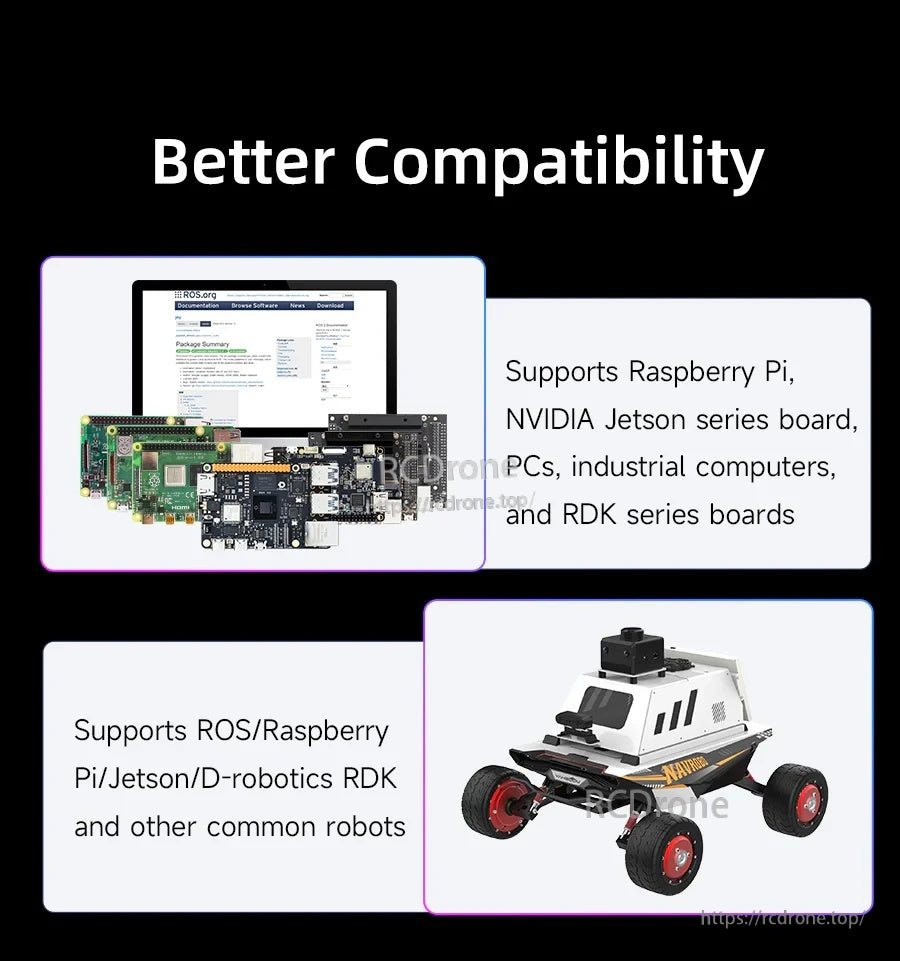
व्यापक हार्डवेयर संगतता SBCs, एज AI बोर्डों और औद्योगिक कंप्यूटरों के बीच तैनाती का समर्थन करती है।
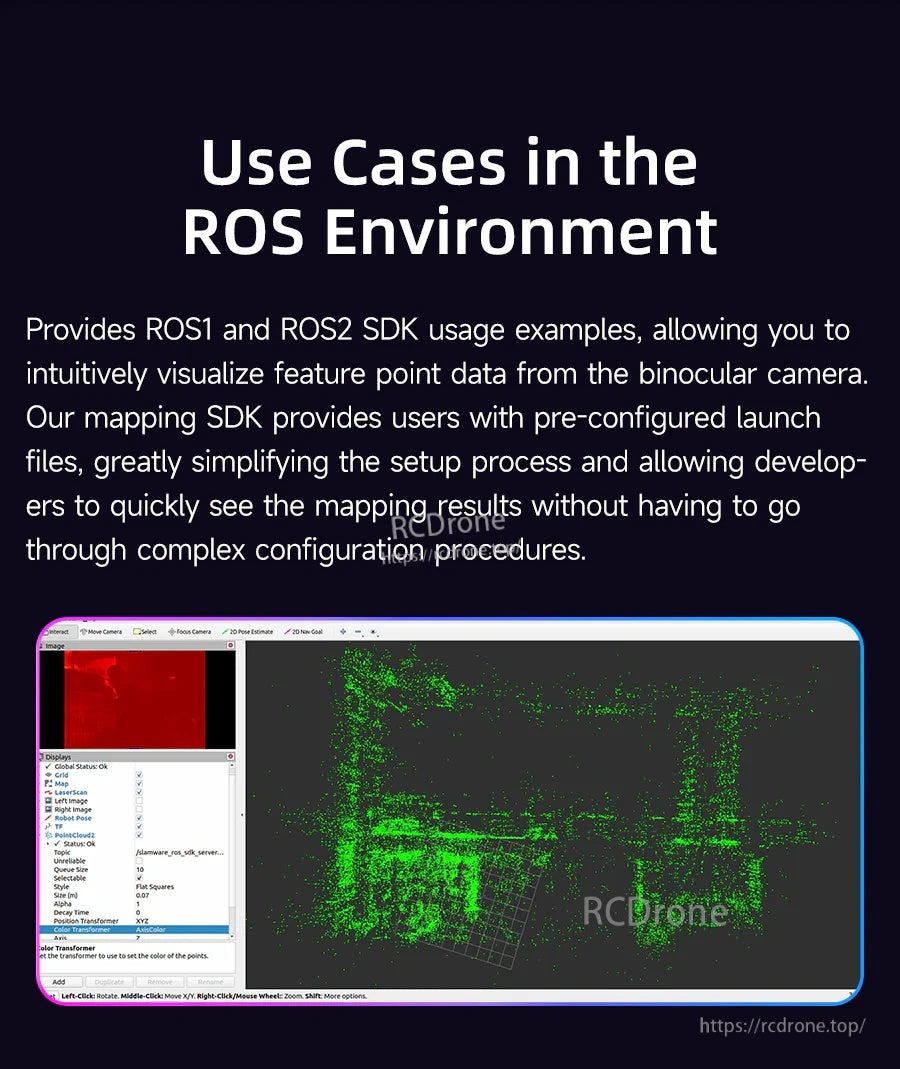
ROS1 और ROS2 SDK उदाहरण आपको बाइनोकुलर-कैमरा फीचर पॉइंट्स को देखने और पूर्व-निर्धारित लॉन्च फ़ाइलों के साथ मैपिंग परिणामों की समीक्षा करने में मदद करते हैं।
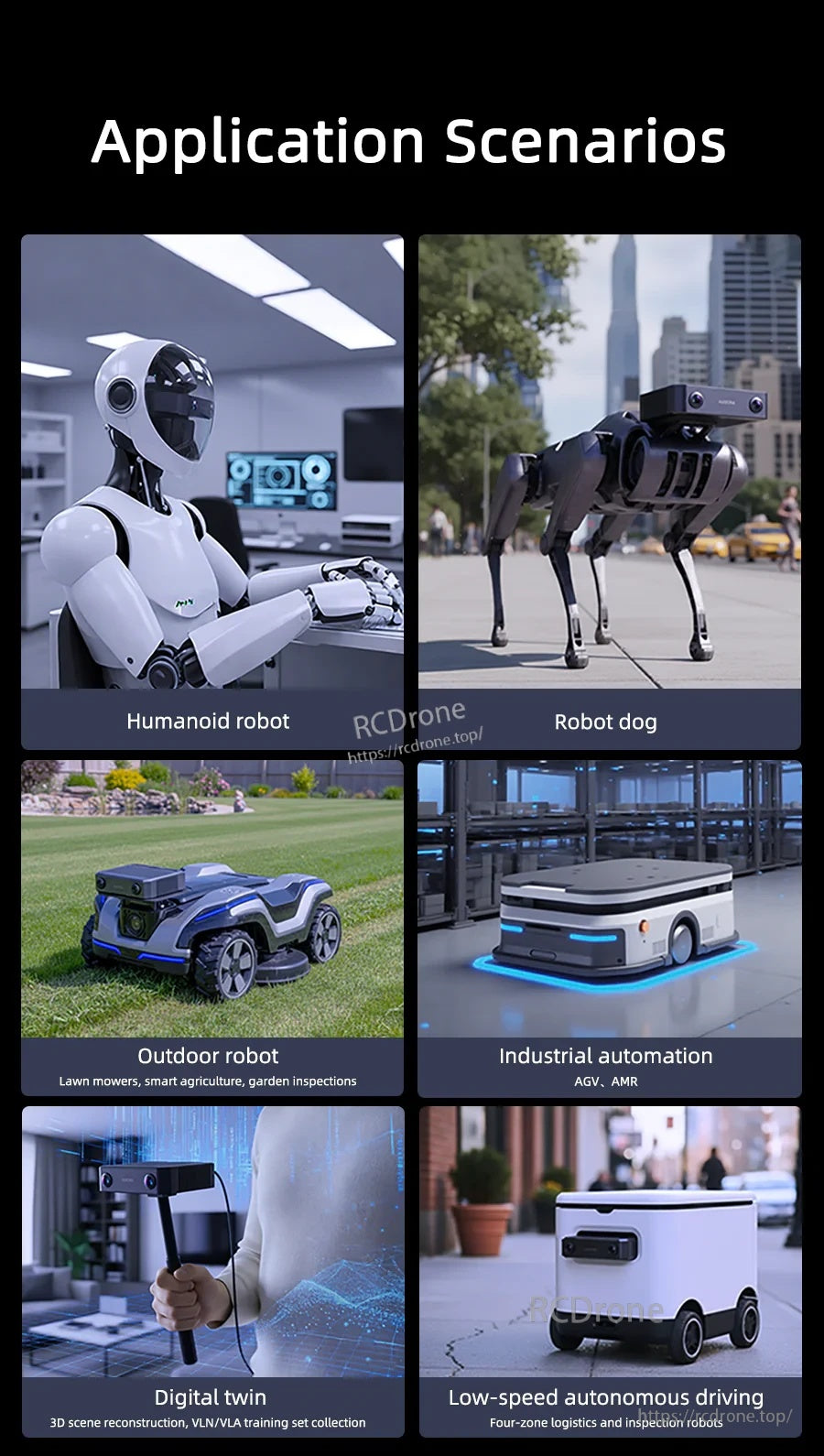
SLAMTEC Aurora S स्थानिक धारणा प्रणाली मानवाकार रोबोट, रोबोट कुत्तों, बाहरी रोबोट, AGV/AMR औद्योगिक स्वचालन, डिजिटल ट्विन्स, और कम गति वाली स्वायत्त ड्राइविंग जैसे प्लेटफार्मों के लिए उपयुक्त है।

SLAMTEC Aurora S एक ट्यूटोरियल लिंक के साथ आता है, साथ ही संगठित बुनियादी पाठ्यक्रम, ROS पाठ्यक्रम, और सेटअप और सीखने के लिए दस्तावेज़ फ़ाइलें।
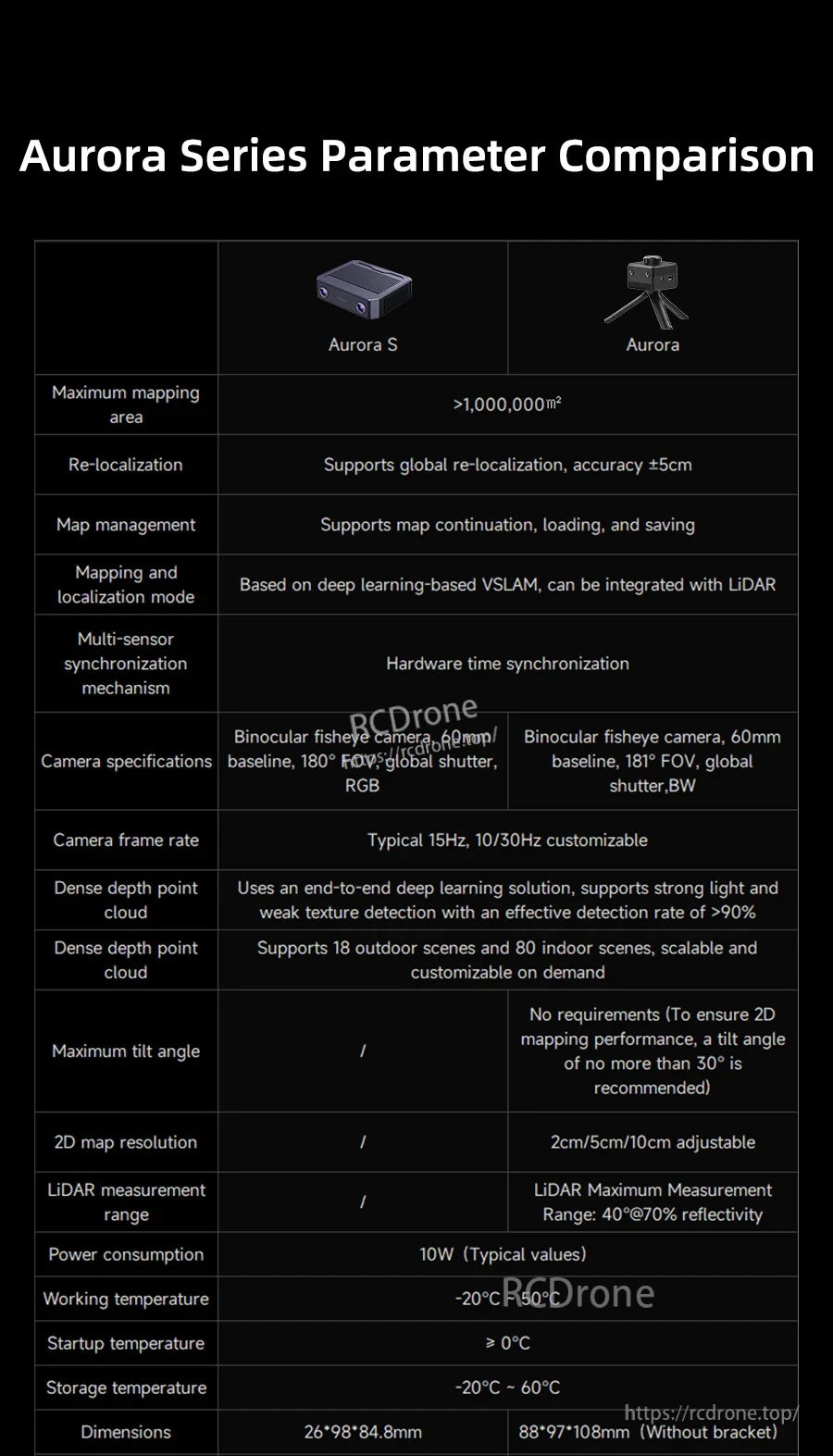
ऑरोरा श्रृंखला की विशिष्टताएँ अधिकतम मैपिंग क्षेत्र, वैश्विक पुनःस्थापन सटीकता, बहु-संवेदक समय समन्वय, और रोबोटिक्स मैपिंग और नेविगेशन के लिए कैमरा/LiDAR विकल्पों को कवर करती हैं।
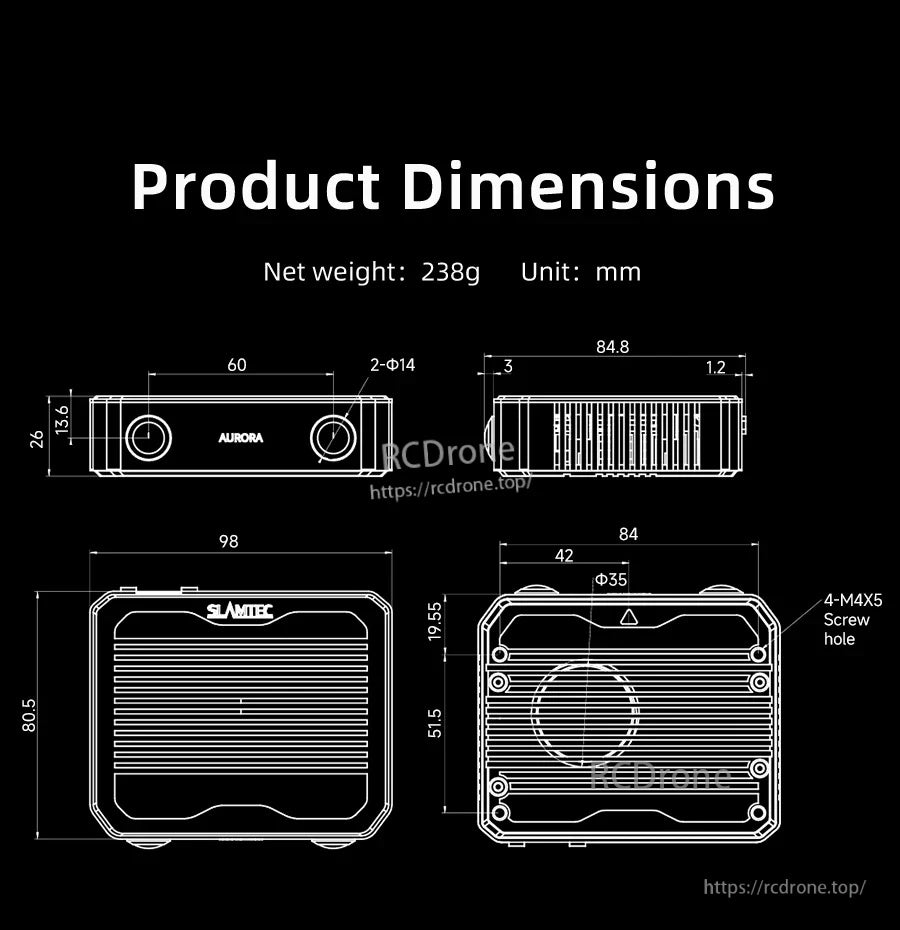
SLAMTEC Aurora S का आवास 98 × 80.5 मिमी मापता है, जिसका शुद्ध वजन 238 ग्राम है और इसमें एकीकरण के लिए MAX5 स्क्रू माउंटिंग होल शामिल हैं।

पैकेज में ऑरोरा एस A2M2 यूनिट और सेटअप के दौरान त्वरित पावर-अप के लिए एक पावर एडाप्टर शामिल है।
Related Collections