CUAV उच्च सटीकता RM3100 C-कम्पास बाहरी कम्पास मैग्नेटोमीटर Pixhawk PX4 ArduPilot DroneCAN/UAVCAN के लिए
CUAV उच्च सटीकता RM3100 C-कम्पास बाहरी कम्पास मैग्नेटोमीटर Pixhawk PX4 ArduPilot DroneCAN/UAVCAN के लिए
CUAV
नियमित रूप से मूल्य
$203.00 USD
नियमित रूप से मूल्य
विक्रय कीमत
$203.00 USD
यूनिट मूल्य
प्रति
Taxes included.
शिपिंग की गणना चेकआउट के समय की जाती है।
पिकअप उपलब्धता लोड नहीं की जा सकी
अवलोकन
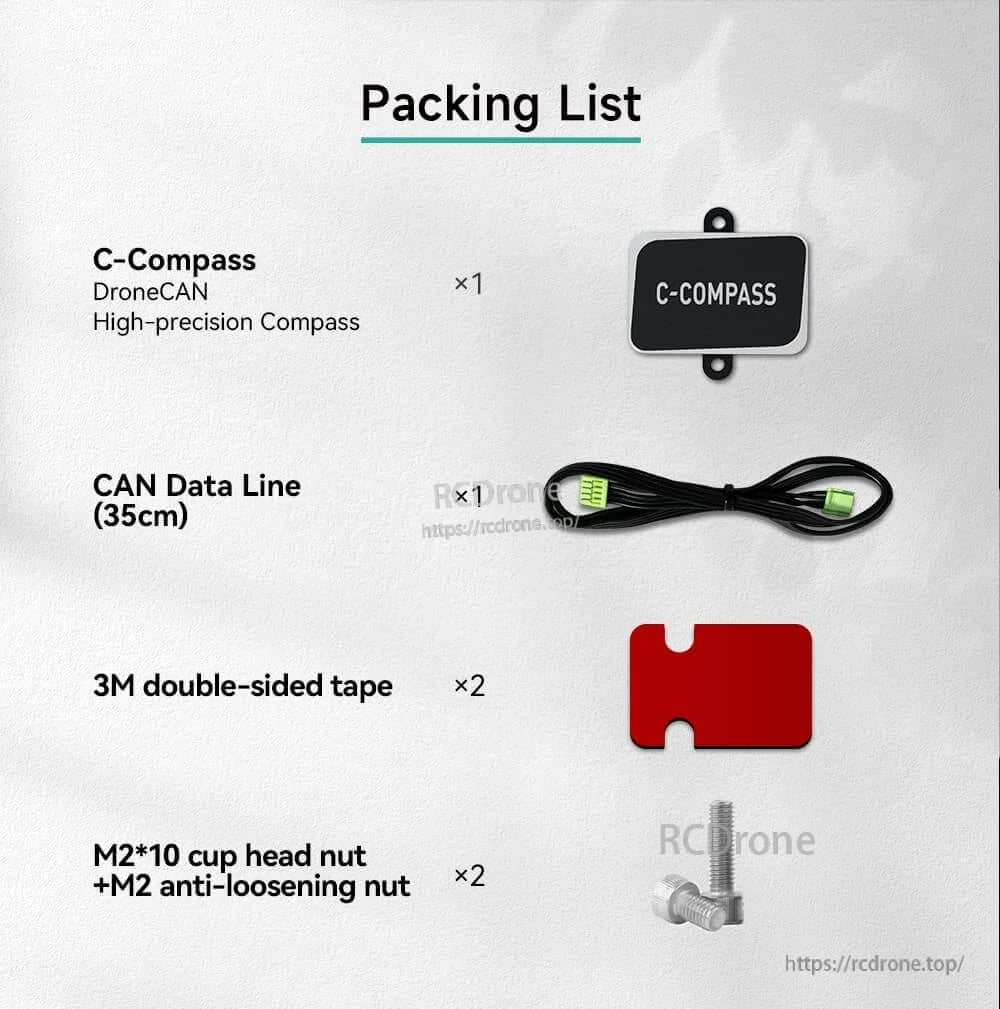
CUAV C-Compass एक बाहरी कंपास (उच्च-सटीकता मैग्नेटोमीटर) है जो RM3100 मैग्नेटिक सेंसर के चारों ओर बनाया गया है, जो Pixhawk और PX4 नियंत्रक पारिस्थितिकी तंत्र के लिए है। यह DroneCAN/UAVCAN बस संचार का उपयोग करता है और ArduPilot और PX4 प्लेटफार्मों के साथ संगत है, जिसमें CUAV M4C सॉफ़्टवेयर आर्किटेक्चर चलाने वाला एक अंतर्निहित STM32F4 प्रोसेसर है, जो विद्युत रूप से शोर वाले एयरफ्रेम में स्थिर दिशा माप के लिए है।
मुख्य विशेषताएँ
- RM3100 मैग्नेटिक सेंसर
- बिल्ट-इन STM32F4 प्रोसेसर
- CUAV द्वारा स्व-विकसित M4C सॉफ़्टवेयर आर्किटेक्चर
- APM/PX4 उड़ान सॉफ़्टवेयर प्लेटफ़ॉर्म के साथ संगत
- DroneCAN/UAVCAN प्रोटोकॉल समर्थन
- बाहरी कंपास के रूप में उपयोग करते समय कम शोर और एंटी-इंटरफेरेंस प्रदर्शन के लिए डिज़ाइन किया गया
विशेषताएँ
| MCU | STM32F412 (32 बिट आर्म कॉर्टेक्स-M4, 100MHz, 512KB फ्लैश, 256KB RAM) |
| सेंसर | RM3100 |
| सॉफ़्टवेयर आर्किटेक्चर | CUAV M4C |
| प्रोटोकॉल | DroneCAN/UAVCAN |
| संचार दर | 2Mb |
| रीफ्रेश दर | 80Hz |
| शोर | 15nT |
| सटीकता | 0.25° (प्रभावी मान) |
| दोहराव सटीकता | 0.05° |
| रिज़ॉल्यूशन | 0.01° |
| संवेदनशीलता | 13nT |
| रेंज | -800 μT से +800 μT |
| नियंत्रक प्रकार | PX4/ArduPilot (CUAV/Pixhawk आदि) |
| इंटरफेस | GHR-04V-S |
| संचालन वोल्टेज | 4.75-5.3V |
| संचालन तापमान | -20 से 80°C |
| संचालन आर्द्रता | 5% से 95% (गंदगी रहित) |
| केसिंग सामग्री | एल्यूमिनियम मिश्र धातु |
| आकार | 31.5 x 31.0 x 14.0mm |
| वजन | 13g |
| सूचीबद्ध वजन | 0.5 किलोग्राम |
| सूचीबद्ध आयाम | 20 x 10 x 10 सेमी |
विकल्प
- C-Compass * 3 पीस
- C-Compass & NEO 3 GPS / सेट
- C-Compass & NEO 3 Pro GPS / सेट
- C-Compass & NEO 3X GPS / सेट
अनुप्रयोग
- Pixhawk और CUAV ऑटोपायलट निर्माण के लिए बाहरी कंपास/हेडिंग संवेदन जो PX4 या ArduPilot चला रहे हैं
- हस्तक्षेप स्रोतों (केबल, बैटरी, मोटर्स) से दूर माउंट करके चुंबकीय माप स्थिरता में सुधार करना
एकीकरण और संगतता प्रश्नों के लिए (DroneCAN/UAVCAN सेटअप, ArduPilot/PX4 पैरामीटर, वायरिंग), संपर्क करें [email protected] or देखें https://rcdrone.top/.
Related Collections