SU17 अनुसंधान ड्रोन - PX4 ओपन सोर्स औद्योगिक ड्रोन विकास MID-360 LiDAR, क्वाड-कैमरा SLAM, EGO-झुंड के साथ
SU17 अनुसंधान ड्रोन - PX4 ओपन सोर्स औद्योगिक ड्रोन विकास MID-360 LiDAR, क्वाड-कैमरा SLAM, EGO-झुंड के साथ
RCDrone
पिकअप उपलब्धता लोड नहीं की जा सकी
अवलोकन
एसयू17 रिसर्च ड्रोन एक उच्च प्रदर्शन वाला क्वाडकॉप्टर है, जिसमें 6000mAh बैटरी, MID-360 लाइडार 3डी मानचित्रण के लिए, क्वाड-कैमरा SLAM सिस्टम सटीक स्थानीयकरण और एकीकृत के लिए जीपीएस+ग्लोनास पोजिशनिंग. टेकऑफ़ वजन के साथ 2.3 किग्रा और एक पेलोड क्षमता 200 ग्राम, यह ऑफर उड़ान का समय 21 मिनट विज़ुअल पोजिशनिंग मोड में। प्रोमेथियस सॉफ़्टवेयर द्वारा संचालित, यह लक्ष्य पहचान, पथ नियोजन और स्वायत्त नेविगेशन का समर्थन करता है, जिससे यह एक बेहतरीन विकल्प बन जाता है। उद्योग ग्रेड अनुसंधान और नवाचार के लिए समाधान।
हार्डवेयर पैरामीटर
विमान
| पैरामीटर | विवरण |
|---|---|
| विमान का प्रकार | quadcopter |
| टेकऑफ़ वजन (लगभग) | 2.3 किग्रा (सुरक्षा कवर और बैटरी के साथ) |
| विकर्ण दूरी | 320 मिमी |
| DIMENSIONS | लंबाई: 442 मिमी, चौड़ाई: 388 मिमी, ऊंचाई: 174 मिमी (सुरक्षा कवर को छोड़कर) |
| अधिकतम पेलोड | 200 ग्राम |
| होवरिंग उड़ान समय | लगभग 13 मिनट (100% पर होवर के साथ, 0% से कम नहीं), दृश्य स्थिति: 21 मिनट |
| होवरिंग सटीकता | जीपीएस: ऊर्ध्वाधर ±1.5 मीटर, क्षैतिज ±2.0 मीटर |
| 3D LiDAR SLAM: ऊर्ध्वाधर ±0.08 मीटर, क्षैतिज ±0.08 मीटर | |
| 4-कैमरा विज़ुअल SLAM: ऊर्ध्वाधर ±0.05 मीटर, क्षैतिज ±0.05 मीटर | |
| पवन प्रतिरोध स्तर | स्तर 4 |
| परिचालन तापमान | -10°C से 40°C |
| मुख्य MCU चिप | एसटीएम32एच743 |
| आईएमयू | आईसीएम42688/बीएमआई088 |
| बैरोमीटर | एमएस5611 |
| कम्पास | क्यूएमसी5883एल |
| इंटरफ़ेस | यूएसबी टाइप-सी |
ऑनबोर्ड कंप्यूटर
| पैरामीटर | विवरण |
|---|---|
| प्रोसेसर | इंटेल कोर i5-8365U |
| मेमोरी क्षमता | 8जीबी |
| स्मृति आवृत्ति | LPDDR3@2133MHz |
| भंडारण | 256जीबी एनवीएमई एसएसडी |
| नेटवर्क पोर्ट | बायडू अपोलो ईथरनेट X2, 12V@3A poweआर आपूर्ति, IEEE 1588-2008 (PTP v2) का समर्थन करता है |
| आनुक्रमिक द्वार | टीटीएल सीरियल पोर्ट X2, 5V/3.3V@500mA poweआर आपूर्ति |
| USB | टाइप-सी X2 (1x USB2.0, 1x USB3.0) |
| HDMI | एचडीएमआई 1.4 |
पावर बैटरी
| पैरामीटर | विवरण |
|---|---|
| नमूना | एसयू17-एल |
| बैटरी प्रकार | उच्च दबाव लिथियम पॉलिमर बैटरी |
| रेटेड वोल्टेज | 26.4V (अधिकतम), 21V (न्यूनतम) |
| भंडारण वोल्टेज | 22.8V (सामान्य) |
| निर्धारित क्षमता | 6000एमएएच |
| वज़न | 680 ग्राम |
| DIMENSIONS | लंबाई: 85.2 मिमी, चौड़ाई: 86.5 मिमी, ऊंचाई: 135 मिमी |
दूरवर्ती के नियंत्रक
| पैरामीटर | विवरण |
|---|---|
| नमूना | क्यूई-2 |
| चैनल | 8 |
| ट्रांसमिशन पावर | 18~20 डीबीएम |
| वज़न | 294.1 ग्राम |
गिम्बल
| पैरामीटर | विवरण |
|---|---|
| नियंत्रण योग्य कोण | -90° ~ 30° (झुकाव अक्ष) |
| स्ट्रीमिंग प्रोटोकॉल | आरटीएसपी (मानक) |
| एनकोडिंग प्रारूप | 264 |
| संकल्प | 1080पी @ 25fps |
| विकर्ण FOV (डी) | 120° |
| ऊर्ध्वाधर FOV (V) | 54° |
| क्षैतिज FOV (एच) | 95° |
छवि संचरण
| पैरामीटर | विवरण |
|---|---|
| परिचालन आवृत्ति | 2.4 गीगाहर्ट्ज |
| ट्रांसमिशन पावर | 18डीबीएम |
| संचार रेंज | 3 किमी (कोई व्यवधान नहीं, कोई बाधा नहीं) |
| छवि रेंज | 1 किमी (न्यूनतम हस्तक्षेप, कोई बाधा नहीं) |
| अधिकतम बैंडविड्थ | 40एमबीपीएस |
चौगुनी गहराई वाला कैमरा
| पैरामीटर | विवरण |
|---|---|
| विज़न एक्सेलेरेटर | इंटेल मोविडियस मायरीड एक्स वीपीयू |
| अधिकतम रिज़ॉल्यूशन | 1296x816 |
| अधिकतम फ़्रेम दर | 1280x800 @ 120fps |
| शटर प्रकार | ग्लोबल शटर |
| एनकोडिंग प्रारूप | 8/10-बिट सिंगल स्ट्रीम |
| एफओवी | 150° विकर्ण FOV, 127.4° क्षैतिज FOV, 79.7° ऊर्ध्वाधर FOV |
| सेंसर की संख्या | 4 (2 आगे + 2 पीछे) |
| आईएमयू | बीएमआई270 |
जीएनएसएस
| पैरामीटर | विवरण |
|---|---|
| क्षैतिज सटीकता | 1.5 मीटर सीईपी (एसबीएएस के साथ) |
| वेग सटीकता | 0.05 मीटर/सेकेंड |
| संचालन विधा | जीपीएस + ग्लोनास + बीडीएस + गैलीलियो + एसबीएएस + क्यूजेडएसएस |
अभियोक्ता
| पैरामीटर | विवरण |
|---|---|
| नमूना | एलके150-2640500 |
| एसी इनपुट वोल्टेज | 100 वी ~ 240 वी |
| डीसी इनपुट वोल्टेज | 26.4वी |
| वज़न | 460 ग्राम |
| चार्जिंग करंट | 5ए |
3डी लिडार
| पैरामीटर | विवरण |
|---|---|
| नमूना | मध्य 360 |
| लेजर तरंगदैर्ध्य | 905 एनएम |
| माप श्रेणी | 40 मीटर @ 10% परावर्तकता |
| एफओवी | क्षैतिज 360°, ऊर्ध्वाधर -7° ~ 52° |
| न्यूनतम सीमा | 0.1 मी. |
| बिंदु आवृत्ति | 10 हर्ट्ज (विशिष्ट) |
| पॉइंट आउटपुट | 200,000 अंक/सेकंड |
| डेटा इंटरफ़ेस | 100 बेस-TX ईथरनेट |
| डेटा सिंक्रनाइज़ेशन | IEEE 1588-2008 (PTP v2), जीपीएस |
| अंतर्निहित IMU | आईसीएम40609 |
| बिजली आपूर्ति वोल्टेज | 7~27वी |
| DIMENSIONS | 65 मिमी (चौड़ाई) x 65 मिमी (गहराई) x 60 मिमी (ऊंचाई) |
| वज़न | 115 ग्राम |
| परिचालन तापमान | -20° सेल्सियस ~ 55° सेल्सियस |
सॉफ्टवेयर पैरामीटर
ऑनबोर्ड कंप्यूटर
| पैरामीटर | विवरण |
|---|---|
| नमूना | इंटेल कोर i5-8365U |
| प्रणाली | उबंटू 20.04 |
| उपयोगकर्ता नाम | अमोव |
| पासवर्ड | अमोव |
| कार्यालयों | मानसिक |
| ओपनसीवी | 4.7.0 |
| दृश्य स्थिति निर्धारण प्रणाली | बीएसए_स्लैम V1 |
प्रोमेथियस सॉफ्टवेयर
| पैरामीटर | विवरण |
|---|---|
| संस्करण | v2.0 |
| प्रोमेथियस ग्राउंडस्टेशन सिस्टम | v1.24.11.27 (विकी रिलीज़ रिकॉर्ड पर आधारित अंतिम संस्करण) |
विवरण
SU17 अनुसंधान संस्करण
उद्योग-स्तर की गुणवत्ता वाला अनुसंधान ड्रोन
- वैकल्पिक 3D LiDAR: मानचित्रण, स्थिति निर्धारण और नेविगेशन बाधा से बचाव को सक्षम बनाता है।
- प्रोमेथियस स्वायत्त ड्रोन सॉफ्टवेयरड्रोन नियंत्रण में त्वरित महारत हासिल करने के लिए डेमो से भरपूर।
- उद्योग-स्तर उड़ान मंचस्थिर और खुला, अनुसंधान ड्रोन प्रदर्शन के लिए एक नया मानक स्थापित करना।

प्रमुख विशेषताऐं
SU17 अनुसंधान ड्रोन विकास मंच (जिसे SU17 कहा जाता है) एक एकीकृत डिज़ाइन को अपनाता है, जिसमें उच्च-स्तरीय एकीकरण के लिए फ़्लाइट कंट्रोलर, ऑनबोर्ड कंप्यूटर, क्वाड-कैमरा SLAM मॉड्यूल, क्लाउड कैमरा और इमेज ट्रांसमिशन मॉड्यूल शामिल हैं, जो हार्डवेयर स्थिरता और विश्वसनीयता को महत्वपूर्ण रूप से बढ़ाता है। प्रोमेथियस स्वायत्त ड्रोन सॉफ़्टवेयर से लैस, SU17 विभिन्न उड़ान नियंत्रण परिदृश्यों के लिए लक्ष्य पहचान, ट्रैकिंग और पथ नियोजन जैसी सुविधाओं का समर्थन करता है।
यह वैकल्पिक रूप से MID-360 3D LiDAR को एकीकृत करता है, जिसे 3D LiDAR SLAM प्राप्त करने के लिए FAST-LIO एल्गोरिदम के साथ जोड़ा जाता है, जो सटीक पर्यावरणीय संवेदन और स्थिति संबंधी जानकारी प्रदान करता है। EGO-Swarm पथ नियोजन एल्गोरिदम के साथ युग्मित, यह जटिल वातावरण में कुशल वास्तविक समय 3D मानचित्रण और बाधा से बचाव को सक्षम बनाता है।




प्रोमेथियस V2 सॉफ्टवेयर सिस्टम
विकास मंच ROS और प्रोमेथियस ओपन-सोर्स फ्रेमवर्क पर बनाया गया है, जो कुशल पुनर्प्रोग्रामिंग के लिए समृद्ध कार्यक्षमता और व्यापक माध्यमिक विकास API प्रदान करता है। यह स्थिति, वेग, त्वरण और दृष्टिकोण के लिए नियंत्रण इंटरफेस के साथ-साथ स्थिति की जानकारी, उड़ान मोड, बैटरी की स्थिति, IMU डेटा और अन्य ड्रोन स्थिति और सेंसर डेटा इंटरफेस तक पहुंच प्रदान करता है।
इसके अतिरिक्त, इसमें संबंधित API के उपयोग के उदाहरण भी शामिल हैं। इसके अलावा, ड्रोन में उड़ान संचालन (दुर्घटना-रोधी) के लिए सुरक्षा जांच फ़ंक्शन भी हैं, जो असामान्य परिस्थितियों में स्वचालित रूप से उतरने में सक्षम बनाता है, दुर्घटनाओं के जोखिम को कम करता है और एक सुरक्षित विकास प्रक्रिया सुनिश्चित करता है।

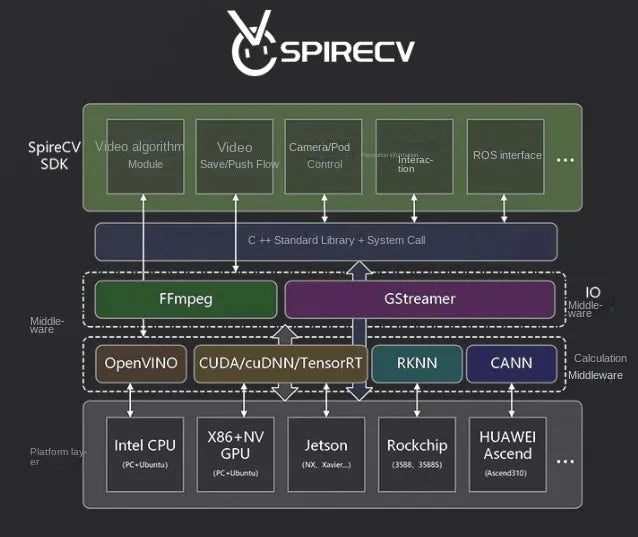
स्पायरसीवी विज़न लाइब्रेरी
स्पायरसीवी विज़न लाइब्रेरी एक वास्तविक समय छवि प्रसंस्करण एसडीके है जिसे विशेष रूप से बुद्धिमान यूएवी सिस्टम के लिए डिज़ाइन किया गया है। यह जिम्बल और कैमरा नियंत्रण, वीडियो भंडारण और स्ट्रीमिंग, लक्ष्य का पता लगाने, पहचान और ट्रैकिंग जैसी कार्यक्षमताएं प्रदान करता है।
इस SDK का उद्देश्य बुद्धिमान UAV सिस्टम के डेवलपर्स के लिए उच्च प्रदर्शन, विश्वसनीयता और एक सुव्यवस्थित इंटरफ़ेस प्रदान करना है। एक सुविधा संपन्न विज़ुअल प्रोसेसिंग समाधान के साथ, यह डेवलपर्स को विभिन्न जटिल विज़न-आधारित अनुप्रयोगों को कुशलतापूर्वक लागू करने में सक्षम बनाता है।
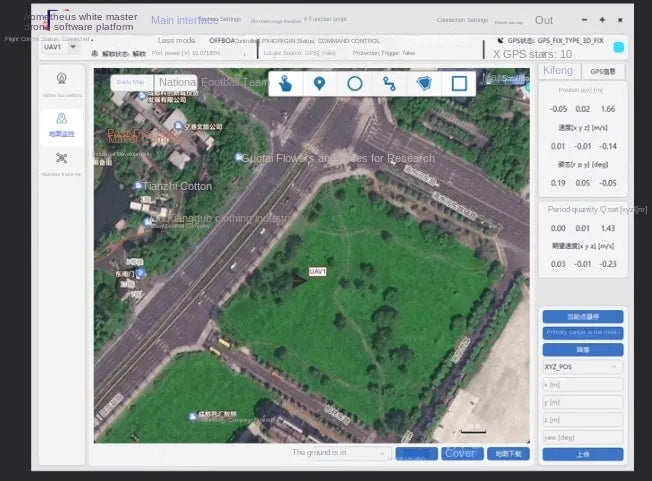
प्रोमेथियस ग्राउंड स्टेशन
प्रोमेथियस ग्राउंड स्टेशन एक मानव-ड्रोन इंटरैक्शन इंटरफ़ेस है जिसे प्रोमेथियस सिस्टम के आधार पर विकसित किया गया है, जिसे Qt तकनीक का उपयोग करके बनाया गया है। यह प्रोमेथियस सिस्टम की कार्यक्षमताओं की तेज़ी से प्रतिकृति बनाने में सक्षम बनाता है, ड्रोन की स्थिति और नियंत्रण डेटा की वास्तविक समय की निगरानी और 3D विज़ुअलाइज़ेशन प्रदान करता है।
ग्राउंड स्टेशन के माध्यम से, उपयोगकर्ता एक-क्लिक टेकऑफ़, वर्तमान स्थिति पर होवर, लैंडिंग और स्थिति नियंत्रण जैसे कमांड निष्पादित कर सकते हैं। इसके अतिरिक्त, सिस्टम उपयोगकर्ता-परिभाषित स्क्रिप्ट आरंभ करने या कस्टम संदेश भेजने के लिए कस्टम फ़ंक्शन बटन का समर्थन करता है, जो उपयोगकर्ता संचालन की सुविधा, दक्षता और मापनीयता में उल्लेखनीय रूप से सुधार करता है।
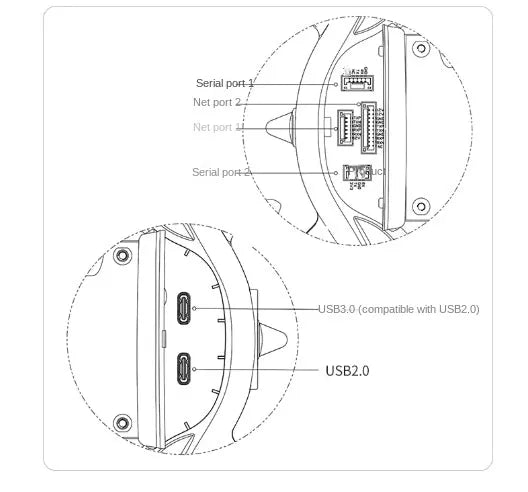
शक्तिशाली विस्तार
हार्डवेयर विस्तार पोर्ट
-
सीरियल पोर्ट 1
-
सीरियल पोर्ट 2
-
नेटवर्क पोर्ट 1
-
नेटवर्क पोर्ट 2
-
यूएसबी पोर्ट:
- यूएसबी 3.0 (यूएसबी 2.0 के साथ संगत)
- यूएसबी 2.0
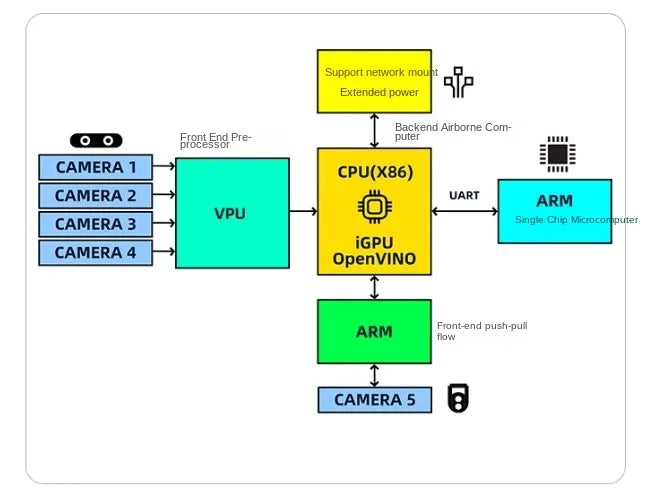
हार्डवेयर फ्रेमवर्क
यह चित्र SU17 ड्रोन की हार्डवेयर वास्तुकला को दर्शाता है, जो उन्नत डेटा प्रोसेसिंग और सिस्टम नियंत्रण के लिए विभिन्न घटकों के एकीकरण पर प्रकाश डालता है:
-
कैमरा (कैमरा 1-4):
एक से जुड़ा वीपीयू (विज़न प्रोसेसिंग यूनिट) फ्रंट-एंड प्रीप्रोसेसिंग के लिए। -
वीपीयू:
एकाधिक कैमरों से दृश्य डेटा को संभालता है और उसे प्रसंस्करण इकाइयों को अग्रेषित करता है। -
सीपीयू (X86) साथ iGPU और OpenVINO:
बैकएंड प्रोसेसिंग के लिए प्राथमिक कम्प्यूटेशनल इकाई के रूप में कार्य करता है, तथा संवर्धित कम्प्यूटेशनल शक्ति के लिए नेटवर्क से जुड़ी विस्तार क्षमताओं को समर्थन प्रदान करता है। -
ARM सिंगल-चिप माइक्रोकंट्रोलर:
अतिरिक्त नियंत्रण कार्यात्मकता के लिए UART इंटरफ़ेस के माध्यम से CPU के साथ इंटरैक्ट करता है। -
फ्रंट-एंड पाइपलाइनिंग और कैमरा 5:
डेटा को और अधिक सुव्यवस्थित करने के लिए एक समर्पित ARM प्रोसेसर द्वारा प्रबंधित किया जाता है।
यह फ्रेमवर्क कई प्रोसेसिंग यूनिट्स को एकीकृत करता है, जो वास्तविक समय छवि विश्लेषण, उन्नत कम्प्यूटेशनल कार्यों और हार्डवेयर घटकों के बीच निर्बाध संचार का समर्थन करता है। यह अनुसंधान और विकास अनुप्रयोगों में जटिल संचालन के कुशल संचालन को सुनिश्चित करता है।
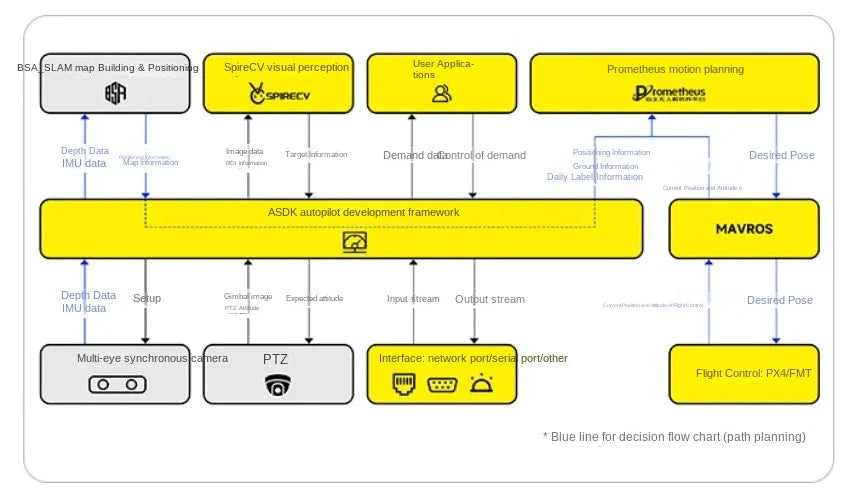
सॉफ्टवेयर फ्रेमवर्क
चित्र में SU17 ड्रोन की सॉफ्टवेयर वास्तुकला को दर्शाया गया है, जो स्वायत्त कार्यक्षमता के लिए विभिन्न प्रणालियों के एकीकरण पर प्रकाश डालता है:
-
BSA_SLAM (मानचित्रण और स्थानीयकरण):
- स्थानिक मानचित्रण और स्थिति निर्धारण डेटा प्रदान करता है।
- सटीक पर्यावरण बोध के लिए गहराई और IMU सेंसर इनपुट को एकीकृत करता है।
-
स्पायरसीवी विजन परसेप्शन:
- वस्तु पहचान, ROI सूचना और लक्ष्य ट्रैकिंग सहित दृश्य डेटा को संसाधित करता है।
-
उपयोगकर्ता अनुप्रयोग:
- डेटा विज़ुअलाइज़ेशन और कमांड इनपुट जैसे उपयोगकर्ता-संचालित कार्यों के लिए इंटरफेस।
-
प्रोमेथियस मोशन प्लानिंग:
- स्थिति, वेग और लक्ष्य डेटा का उपयोग करके प्रक्षेप पथ योजना का प्रबंधन करता है।
-
ASDK स्वायत्त ड्राइविंग फ्रेमवर्क:
- यह केंद्रीय प्रसंस्करण परत के रूप में कार्य करता है, तथा सेंसर, कैमरा, क्लाउड मॉड्यूल और बाहरी इंटरफेस के बीच डेटा प्रवाह का प्रबंधन करता है।
- एकाधिक इनपुट/आउटपुट चैनलों (जैसे, नेटवर्क पोर्ट, सीरियल पोर्ट) का समर्थन करता है।
-
मावरोस:
- उड़ान की स्थिति और स्थिति नियंत्रण के लिए उड़ान नियंत्रण प्रणालियों (PX4/FMT) के साथ संचार करता है।
-
क्लाउड मॉड्यूल और मल्टी-सिंक कैमरे:
- उन्नत प्रसंस्करण के लिए क्लाउड-आधारित डेटा को एकीकृत करता है।
- उच्च परिशुद्धता संचालन के लिए दृश्य इनपुट को सिंक्रनाइज़ करता है।
नीली रेखाएँप्रक्षेप पथ नियोजन के लिए निर्णय लेने के मार्गों का प्रतिनिधित्व करना।
यह आर्किटेक्चर एक मॉड्यूलर, एक्सटेंसिबल डिजाइन को प्रदर्शित करता है, जो मजबूत ड्रोन संचालन के लिए विभिन्न हार्डवेयर और सॉफ्टवेयर घटकों के बीच निर्बाध संचार को सक्षम बनाता है।
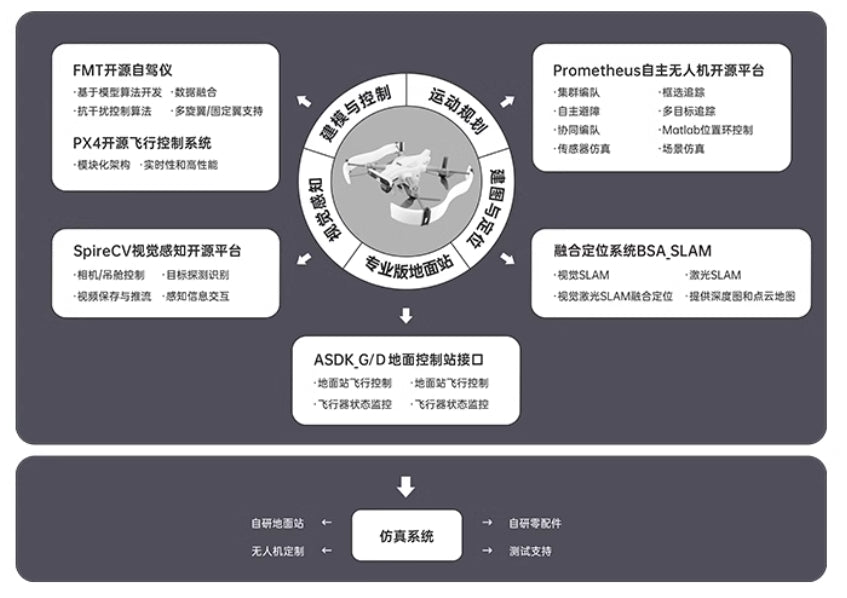
बुद्धिमान खुलापन: एकीकृत यूएवी प्रणाली समाधान
यह आरेख ड्रोन प्रणालियों के लिए एक व्यापक और खुली वास्तुकला प्रस्तुत करता है, जो विभिन्न घटकों में मॉड्यूलरिटी और एकीकरण पर जोर देता है:
-
मुख्य घटक:
- एफएमटी ओपन-सोर्स ऑटोपायलट: मॉड्यूलर विकास के आधार पर विश्वसनीय उड़ान नियंत्रण प्रदान करता है, विविध वातावरण और डेटा एकीकरण का समर्थन करता है।
- पीएक्स4 उड़ान नियंत्रण प्रणाली: स्थिरता सुनिश्चित करता है और उन्नत मॉड्यूलर अनुकूलन का समर्थन करता है।
- स्पायरसीवी विजन परसेप्शन प्लेटफॉर्म: ऑब्जेक्ट डिटेक्शन, ट्रैकिंग और वास्तविक समय वीडियो स्ट्रीमिंग सहित छवि प्रसंस्करण पर ध्यान केंद्रित करता है।
-
प्रमुख रूपरेखाएँ:
- प्रोमेथियस स्वायत्त यूएवी प्लेटफ़ॉर्मइसमें बहु-ड्रोन नियंत्रण, गति योजना, सहयोगात्मक नेविगेशन और वास्तविक दुनिया सिमुलेशन शामिल हैं।
- BSA_SLAM प्रणाली: सटीक स्थिति निर्धारण और मानचित्रण के लिए दृष्टि-आधारित SLAM और LiDAR-आधारित SLAM को संयोजित करता है।
- एएसडीके जी/डी ग्राउंड स्टेशन नियंत्रण इंटरफ़ेस: निगरानी और वास्तविक समय समायोजन के लिए ग्राउंड स्टेशनों और यूएवी के बीच निर्बाध संचार को सक्षम बनाता है।
-
वर्कफ़्लो एकीकरण:
- गति नियोजन, पर्यावरण मानचित्रण और स्वायत्त नेविगेशन जैसी प्रक्रियाओं पर प्रकाश डाला गया।
- प्रक्षेप पथ नियंत्रण, बाधा निवारण और वास्तविक समय डेटा प्रबंधन के लिए पेशेवर ग्राउंड स्टेशनों के साथ एकीकरण।
-
सिमुलेशन समर्थन:
- इसमें स्वायत्त मिशन परीक्षण, यूएवी नियंत्रण और घटक सत्यापन के लिए सिमुलेशन प्रणाली शामिल है।
यह प्रणाली स्वायत्त यूएवी विकास के लिए अत्याधुनिक समाधान प्रस्तुत करती है, जिसमें विविध परिदृश्यों में अनुसंधान, अनुप्रयोग और परीक्षण के लिए मापनीय क्षमताएं हैं।
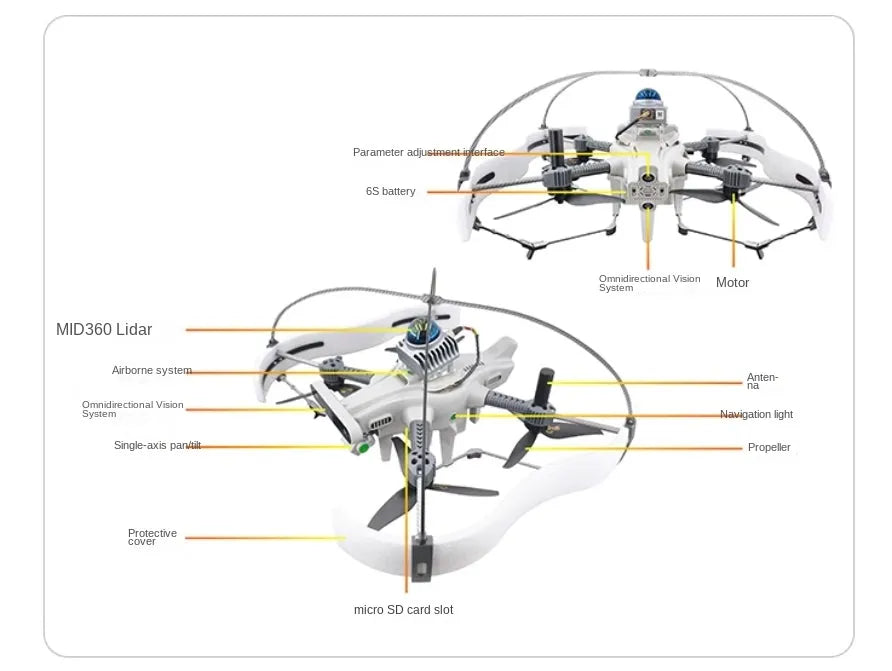
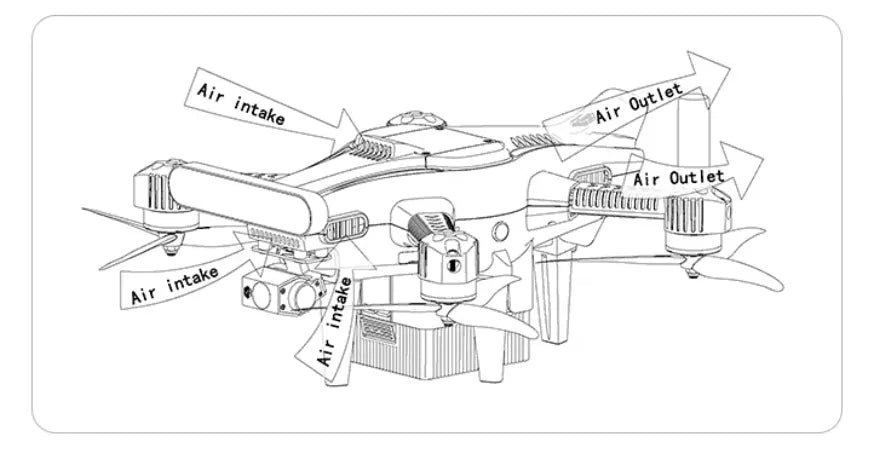
SU17 अनुसंधान ड्रोन के संरचनात्मक घटकों की जानकारी, इसकी स्थिरता और उन्नत डिजाइन पर जोर देती है। प्रमुख विशेषताओं में शामिल हैं MID360 लाइडार सटीक मानचित्रण के लिए, सर्वदिशात्मक दृष्टि प्रणाली व्यापक पर्यावरणीय धारणा के लिए, एकल-अक्षीय गिम्बल स्थिर इमेजिंग के लिए, और एक मजबूत 6एस बैटरी विस्तारित शक्ति के लिए। अन्य आवश्यक घटकों में शामिल हैं प्रोपेलर प्रणाली, एंटीना, नेविगेशन लाइट, और एक माइक्रो एसडी कार्ड स्लॉट डेटा भंडारण के लिए। डिजाइन अत्याधुनिक हार्डवेयर को एकीकृत करता है, जो विभिन्न शोध अनुप्रयोगों के लिए विश्वसनीयता और उच्च प्रदर्शन सुनिश्चित करता है।
Related Collections