








WitMotion HWT601-AGV-485 IMU RS485 Modbus, IP67, 200 Hz – 6-एक्सिस एक्सेलेरोमीटर, जायरोस्कोप, इनक्लिनोमीटर, ROS/Matlab
WitMotion HWT601-AGV-485 IMU RS485 Modbus, IP67, 200 Hz – 6-एक्सिस एक्सेलेरोमीटर, जायरोस्कोप, इनक्लिनोमीटर, ROS/Matlab
WitMotion
पिकअप उपलब्धता लोड नहीं की जा सकी
Overview
WitMotion HWT601-AGV-485 एक 6-धुरी स्थिति/हेडिंग सेंसर है जिसे AGV रोबोट, ड्रोन और स्वायत्त प्लेटफार्मों के लिए डिज़ाइन किया गया है। यह 3-धुरी त्वरण + 3-धुरी कोणीय वेग को जोड़ता है और 3-धुरी कोण &और क्वाटरनियन को RS485 (Modbus) के माध्यम से 200 Hz तक आउटपुट करता है। इस मॉड्यूल में काल्मन डायनामिक फ़िल्टरिंग, उच्च-सटीक टर्नटेबल कैलिब्रेशन, स्वचालित/हाथ से पूर्वाग्रह अधिग्रहण, पावर-ऑफ पर हेडिंग सहेजने के लिए बैकअप पावर, और एक IP67 जलरोधक/धूलरोधक आवास है। यह समन्वित स्थिति माप के लिए बहु-स्तरीय कैस्केडिंग (32 इकाइयों तक) का समर्थन भी करता है।
मुख्य विशेषताएँ
-
उच्च-सटीक कोण: XY सटीकता 0.1°; Z सटीकता 0.1° (HWT601-AGV-485) / 0.15° (WT601-AGV-485).
-
स्थिर जिरोस्कोप पूर्वाग्रह: XY 5°/घंटा; Z 2°/घंटा (HWT601-AGV-485) / 5°/घंटा (WT601-AGV-485).
-
व्यापक इनपुट 9–36 V, संचालन वर्तमान ≈ 8 mA @12 V.
-
RS485 Modbus, बौड 4,800–230,400 bps.
-
नमूना: अनुरोध–प्रतिक्रिया पढ़ाई तक 200 Hz.
-
एल्गोरिदम: काल्मन फ़िल्टर फ्यूजन और समर्पित AGV दिशा एल्गोरिदम.
-
सॉफ़्टवेयर: लाइव डैशबोर्ड, वक्र प्लॉट, 3D दृश्य (कार/गेंद/घन/विमान), कॉन्फ़िगरेशन (पूर्वाग्रह, कोण संदर्भ, त्वरण कैलिब्रेशन, स्केल फैक्टर), डेटा रिकॉर्डिंग &और सीधे सहेजना, और Matlab आयात.
-
डेवलपर-फ्रेंडली: उदाहरण कार्यक्रम और कोड समर्थन ROS, Linux, C/C#, Python के लिए।
-
पर्यावरणीय: IP67, -40~80 °C (-40~85 °C तालिका संस्करण दिखाया गया)।
-
कैस्केडिंग: RS485 पर एक साथ स्थिति मापने के लिए 32 सेंसर तक।
स्थापना दिशानिर्देश
-
सेंसर को एक सख्त, सपाट, स्थिर सतह पर स्थापित करें; असमान आधार कोण त्रुटि का कारण बनते हैं (देखें FIG.1–2)।
-
सेंसर धुरी को मापी गई धुरी के समानांतर रखें; इंटर-धुरी कोणों से बचें (देखें FIG.3–4)।
-
यह मॉडल केवल क्षैतिज स्थापना का समर्थन करता है।
सॉफ़्टवेयर &और दृश्यता
-
शक्तिशाली डेटा डैशबोर्ड (कोण, दर, त्वरण, चुम्बकीय, क्वाटरनियन, पोर्ट, तापमान, वोल्टेज, आदि)।
-
कॉन्फ़िगरेशन पैनल: बौड दर, डिवाइस पता, स्वचालित पूर्वाग्रह अधिग्रहण, Z-धुरी रीसेट, त्वरण कैलिब्रेशन, कोण संदर्भ, मैनुअल सकारात्मक/नकारात्मक कैलिब्रेशन और स्केल फैक्टर।
-
3D मॉडल सहज गति निगरानी के लिए और वास्तविक समय वक्र के साथ गतिशील अपडेट।
-
कच्चे डेटा दृश्य और आसान संग्रह के लिए फ़ाइल सहेजना; Matlab विश्लेषण आयात समर्थित।
-
ROS IMU INS डेमो: स्थिति ट्रैकिंग दृश्यता और स्थिति डेटा प्रदर्शन (यॉ, रोल, पिच, कोणीय वेग, रैखिक त्वरण)।
html
विशेषताएँ
इंटरफेस &और प्रदर्शन
| आइटम | HWT601-AGV-485 | WT601-AGV-485 |
|---|---|---|
| इंटरफेस / प्रोटोकॉल | RS485 / Modbus | RS485 / Modbus |
| बॉड दर | 4,800–230,400 bps | 4,800–230,400 bps |
| आउटपुट डेटा | 3-धुरी त्वरण, कोणीय गति, कोण, क्वाटरनियन | समान |
| नमूना आवृत्ति | 200 Hz तक (अनुरोध–प्रतिक्रिया) | 200 Hz तक |
| XY कोण सटीकता | 0.1° | 0. 1° |
| Z कोण सटीकता (360° घुमाव त्रुटि) | 0.1° | 0.15° |
| त्वरण सीमा / संकल्प | ±4 g / 0.0001 g/LSB | समान |
| जाइरो सीमा / संकल्प | ±250 °/सेकंड / 0.0122 (°/सेकंड)/LSB | समान |
| कोण सीमा / संकल्प | XZ: ±180°; Y: ±90° / 0.0059° | समान |
| जाइरो पूर्वाग्रह अस्थिरता (XY / Z) | 5°/घंटा / 2°/घंटा | 5°/घंटा / 5°/घंटा |
| तापमान गुणांक (XYZ) | 0.002°/°C | 0.002°/°C |
इलेक्ट्रिकल, मैकेनिकल &और पर्यावरण
-
सप्लाई वोल्टेज: 9–36 V; ऑपरेटिंग करंट: ≈ 8 mA (12 V)
-
आयाम: 55 × 36.8 × 24 मिमी; केबल की लंबाई: 1 मी
-
सुरक्षा: IP67
-
संचालन तापमान: -40~80 °C (तालिका संस्करण में -40~85 °C भी दिखाता है)
-
स्थापना: केवल क्षैतिज माउंटिंग
-
कैस्केडिंग: 32 इकाइयों तक RS485 पर
अनुप्रयोग क्षेत्र
AGV/AMR और मोबाइल रोबोट, ड्रोन/UAVs, बिना चालक लॉजिस्टिक्स वाहन, और स्वायत्त ड्राइविंग संवेदन मॉड्यूल।
मॉडल नामकरण &और चयन
-
HWT601-AGV-485 – उच्च Z-धुरी सटीकता (0.1°) और कम Z-पूर्वाग्रह अस्थिरता (2°/घंटा)।
-
WT601-AGV-485 – मानक Z-धुरी विनिर्देश (0.15°, 5°/घंटा).
जब Z-हेडिंग सटीकता महत्वपूर्ण हो, तो HWT601 चुनें।
विवरण

उच्च-सटीकता 6-धुरी स्थिति संवेदक जिसमें 3-धुरी त्वरण, कोणीय वेग, कोण, और क्वाटरनियन शामिल हैं। AGV हेडिंग एल्गोरिदम, IP67 सुरक्षा, काल्मन फ़िल्टरिंग, स्वचालित पूर्वाग्रह अधिग्रहण, और पीसी सॉफ़्टवेयर समर्थन की विशेषताएँ।
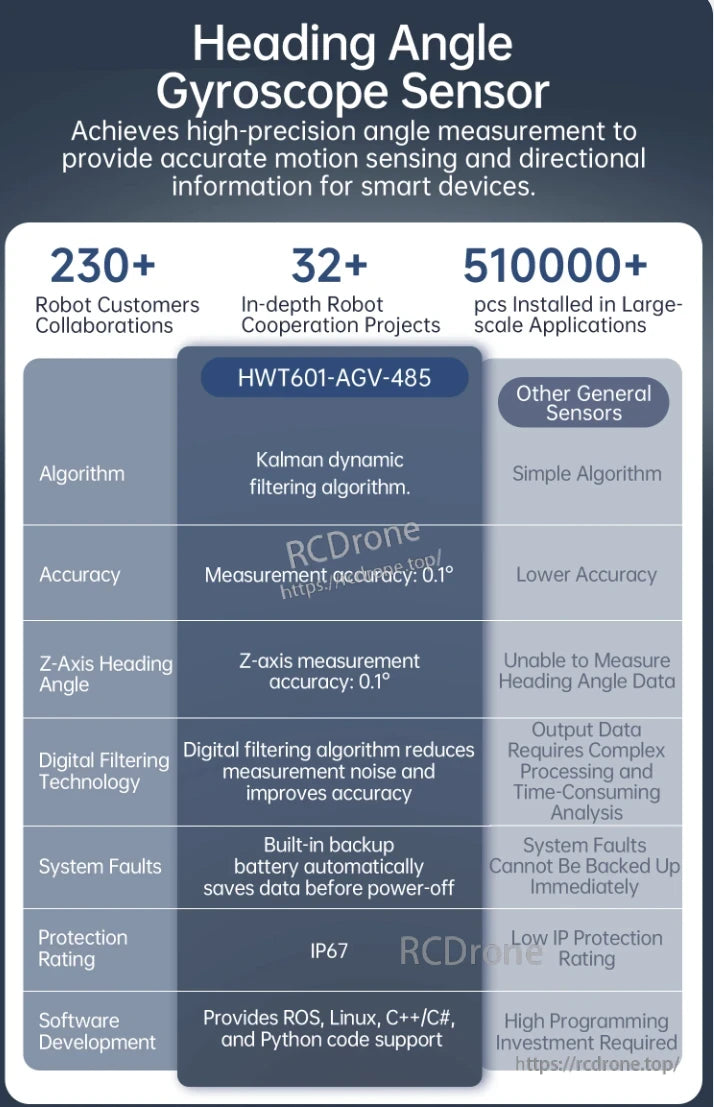
हेडिंग एंगल जिरोस्कोप सेंसर HWT601-AGV-485 उच्च-सटीकता कोण माप प्रदान करता है जिसमें काल्मन फ़िल्टरिंग, 0.1° सटीकता, डिजिटल शोर में कमी, IP67 सुरक्षा, और ROS, Linux, C++, और Python का समर्थन शामिल है। 230 से अधिक रोबोट सहयोग और 510,000+ स्थापना।
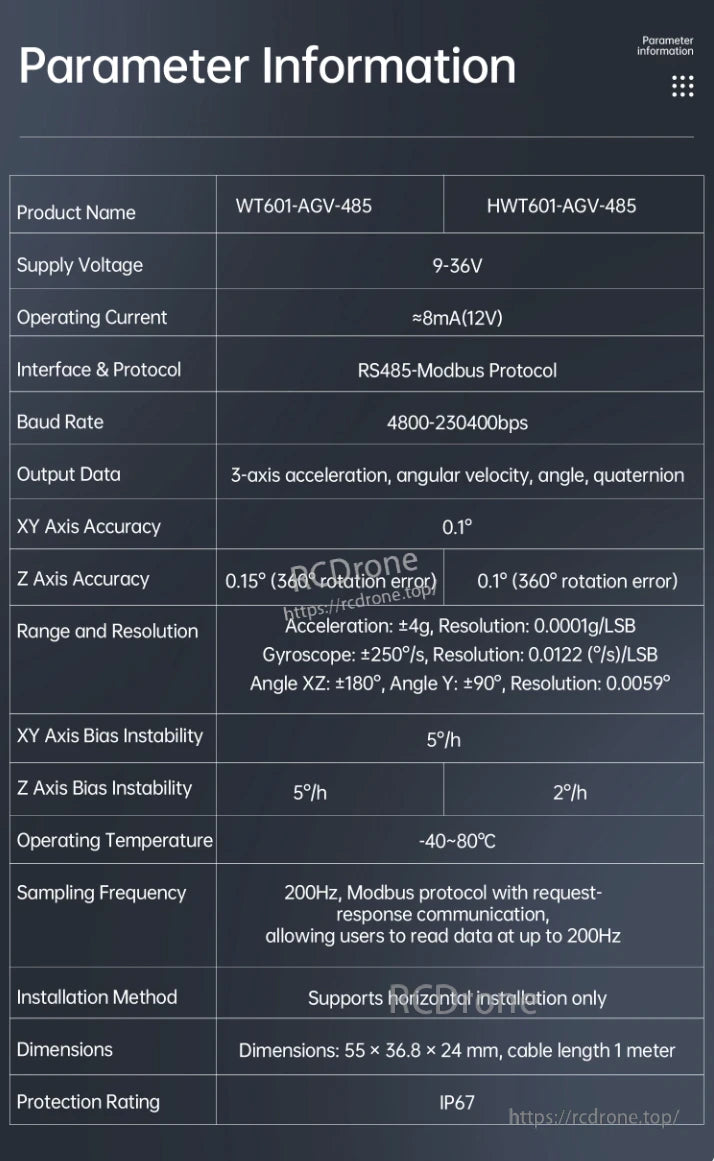
HWT601-AGV-485 IMU 9-36V आपूर्ति, RS485-Modbus, 200Hz सैंपलिंग, ±4g त्वरण, ±250°/सेकंड जिरोस्कोप, IP67 रेटिंग, -40~80°C संचालन प्रदान करता है। यह सटीक, उच्च-रिज़ॉल्यूशन 3-धुरी डेटा प्रदान करता है।
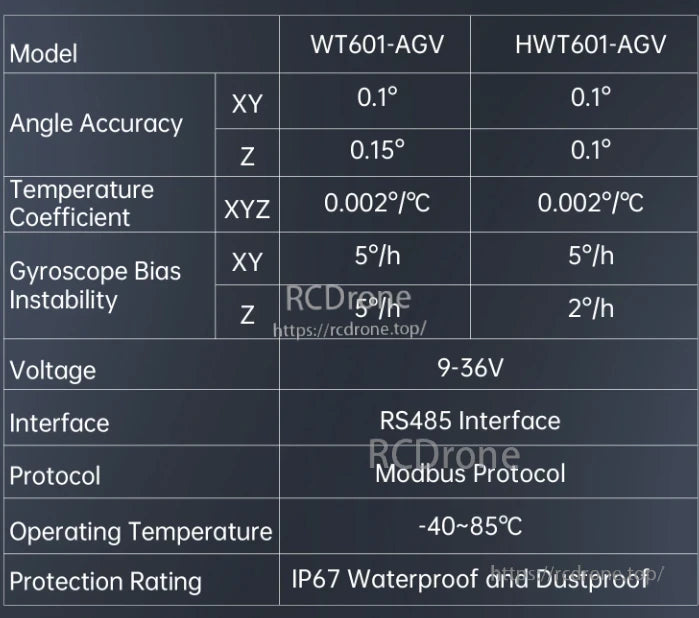
HWT601-AGV IMU XY और Z धुरी में 0.1° कोण सटीकता प्रदान करता है, जिसमें XYZ के लिए 0.002°/°C तापमान गुणांक है। जिरोस्कोप बायस अस्थिरता 5°/घंटा (XY) और 2°/घंटा (Z) है। यह 9–36V पर कार्य करता है, RS485 का उपयोग करता है जिसमें Modbus है, और -40 से 85°C तक कार्य करता है। IP67 रेटेड, यह जलरोधक और धूलरोधक सुरक्षा प्रदान करता है। WT601-AGV संस्करण में समान स्पेक्स हैं लेकिन 0.15° Z-धुरी सटीकता और 5°/घंटा Z-धुरी बायस अस्थिरता है। दोनों मॉडल मांग वाले वातावरण में विश्वसनीय प्रदर्शन सुनिश्चित करते हैं।
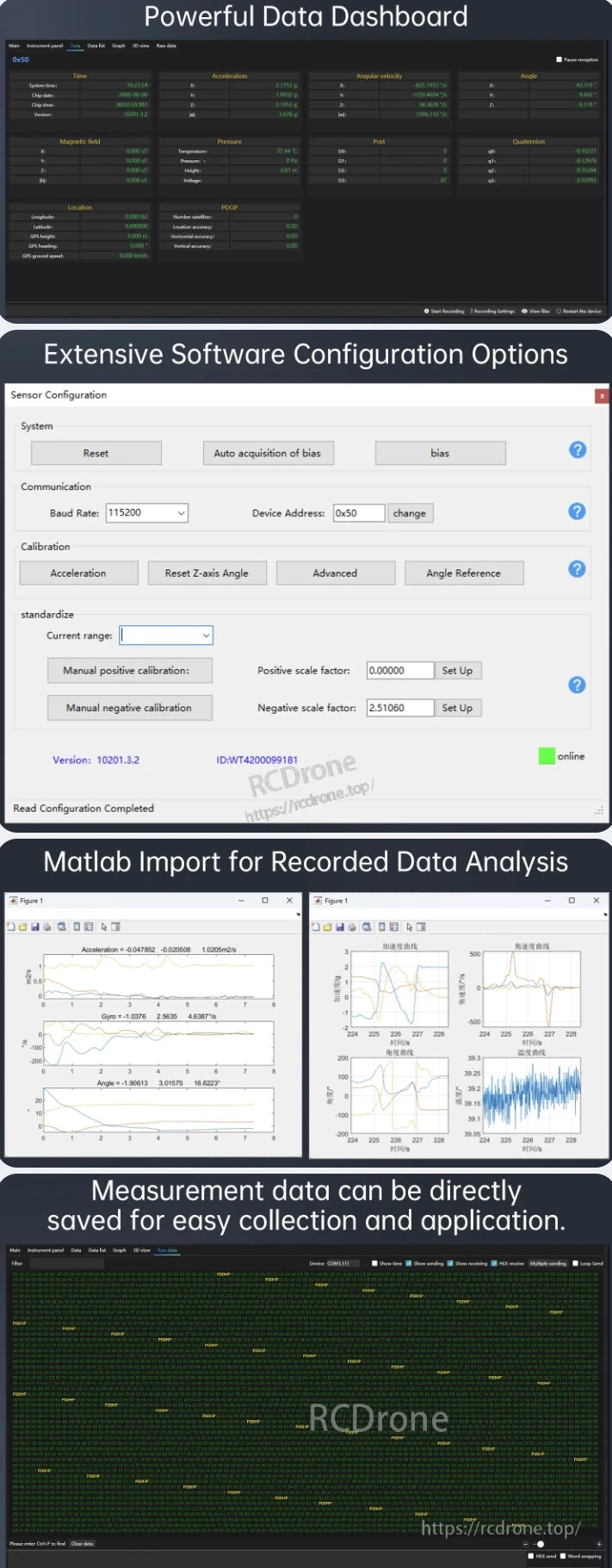
शक्तिशाली डेटा डैशबोर्ड जिसमें वास्तविक समय के सेंसर रीडिंग, व्यापक सॉफ़्टवेयर कॉन्फ़िगरेशन, विश्लेषण के लिए MATLAB आयात, और आसान संग्रहण और अनुप्रयोग के लिए सीधे डेटा सहेजने की सुविधा है।
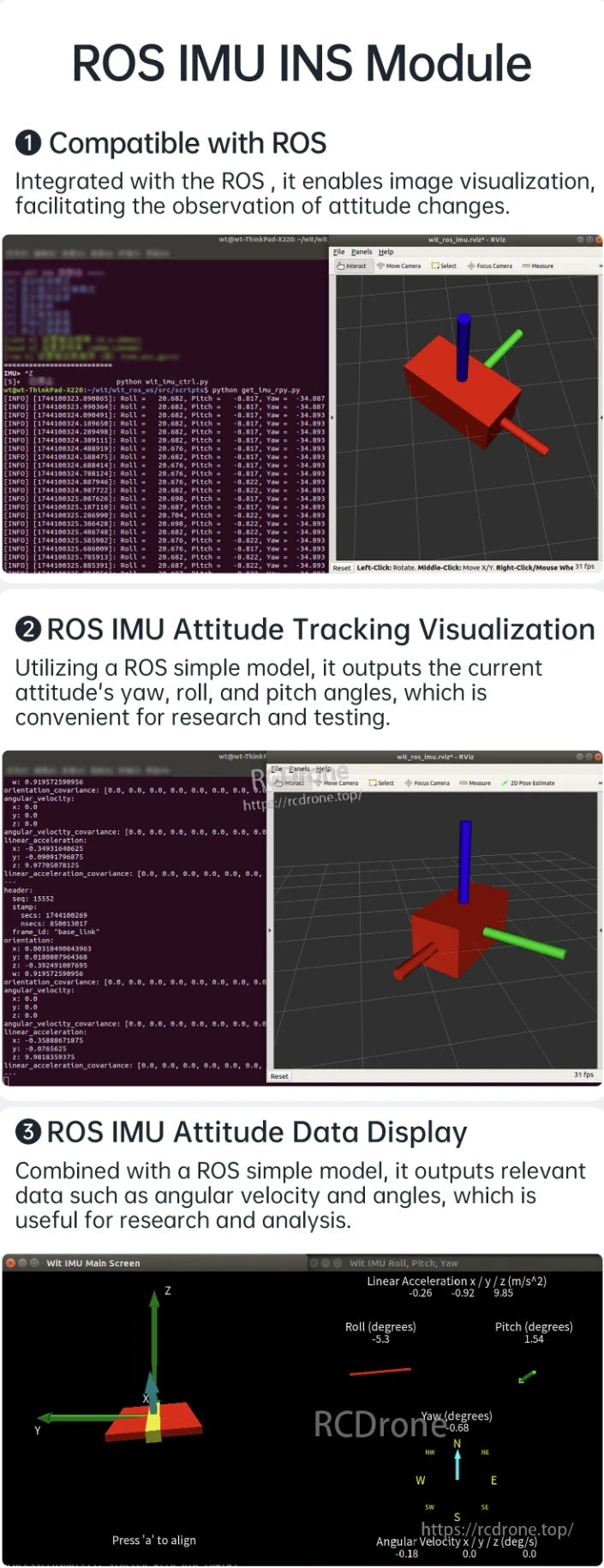
ROS IMU INS मॉड्यूल ROS संगतता प्रदान करता है, स्थिति ट्रैकिंग का दृश्य प्रस्तुत करता है, और अनुसंधान और विश्लेषण के लिए वास्तविक समय में रोल, पिच, यॉ, कोणीय वेग, और रैखिक त्वरण प्रदर्शित करता है।
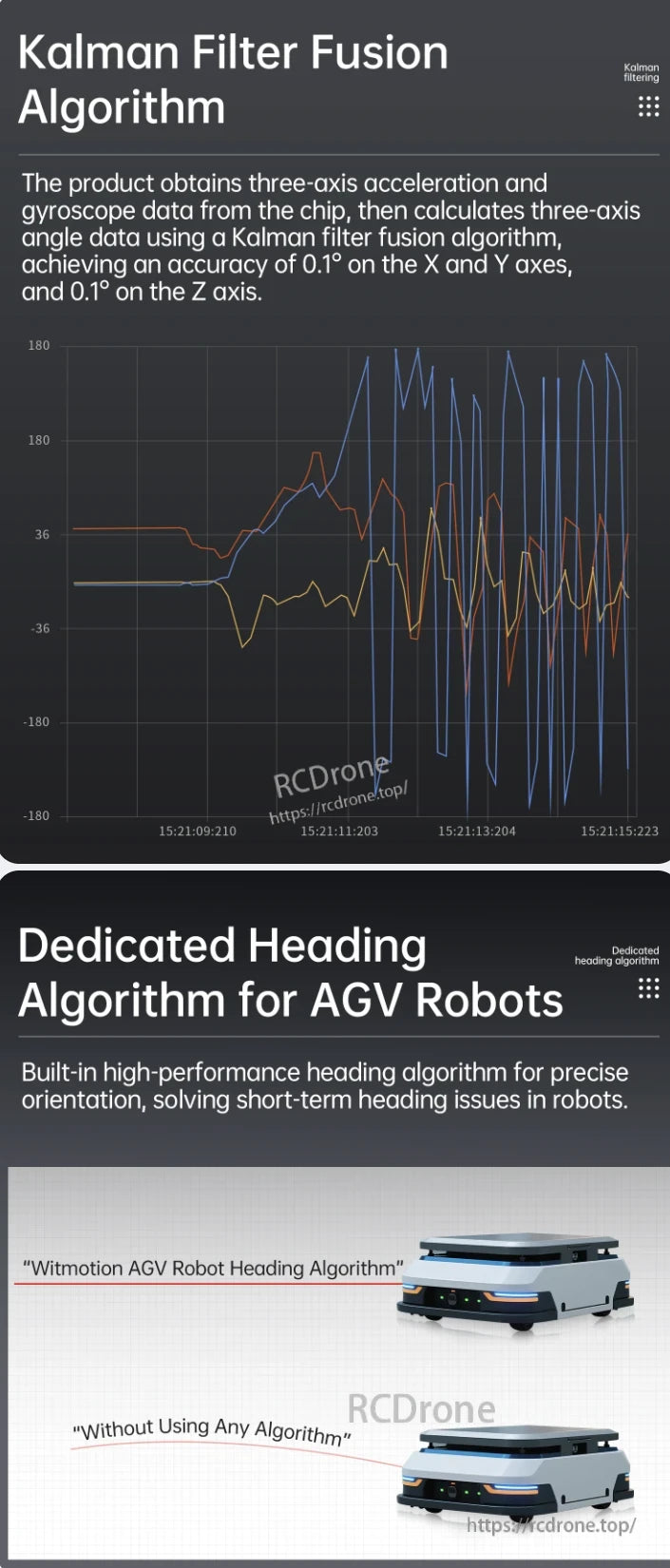
WitMotion HWT601 AGV IMU 0.1° सटीकता के साथ 3-धुरी कोण डेटा प्रदान करता है, जो काल्मन फ़िल्टर फ्यूजन का उपयोग करता है। इसका समर्पित हेडिंग एल्गोरिदम स्थिर रोबोट अभिविन्यास सुनिश्चित करता है, जो बिना ऐसे एल्गोरिदम वाले सिस्टम की तुलना में प्रदर्शन को महत्वपूर्ण रूप से बढ़ाता है।
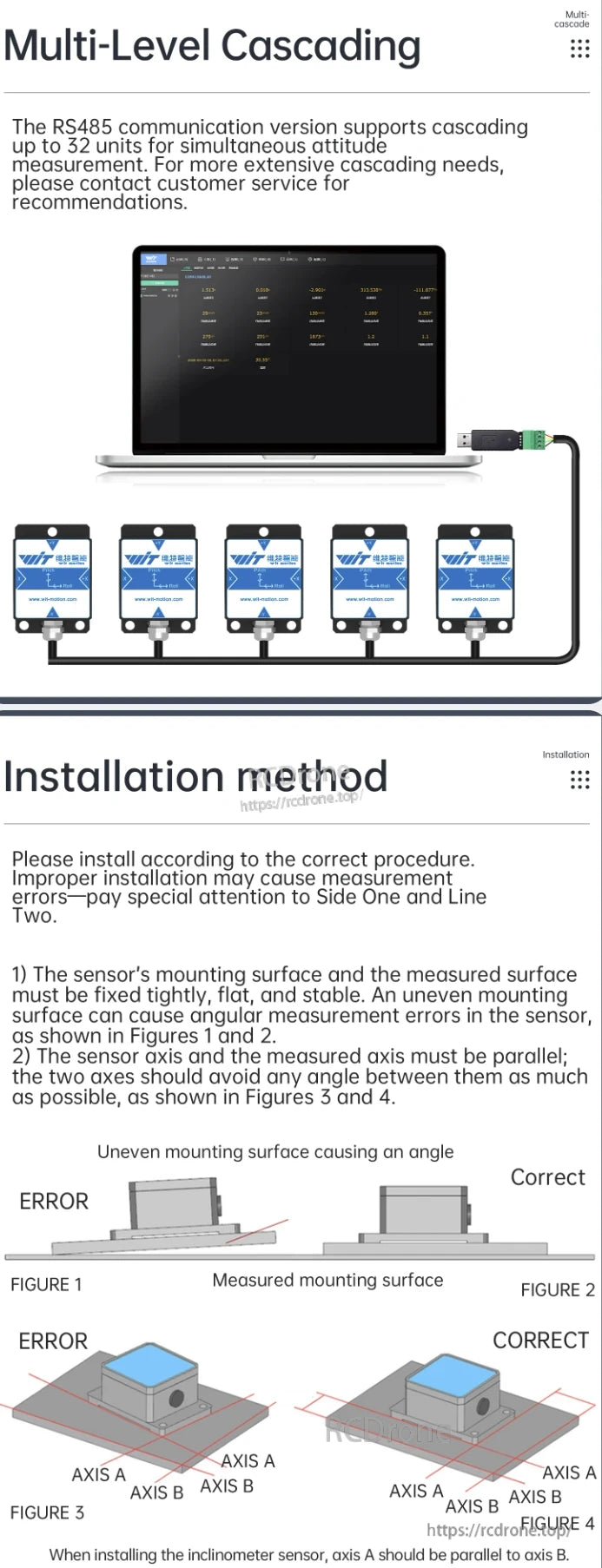
WitMotion HWT601 AGV IMU स्थिति माप के लिए RS485 के माध्यम से 32 कैस्केडिंग यूनिट तक का समर्थन करता है। सटीकता के लिए सुनिश्चित करें कि माउंटिंग सपाट, स्थिर हो और अक्ष संरेखित हों।
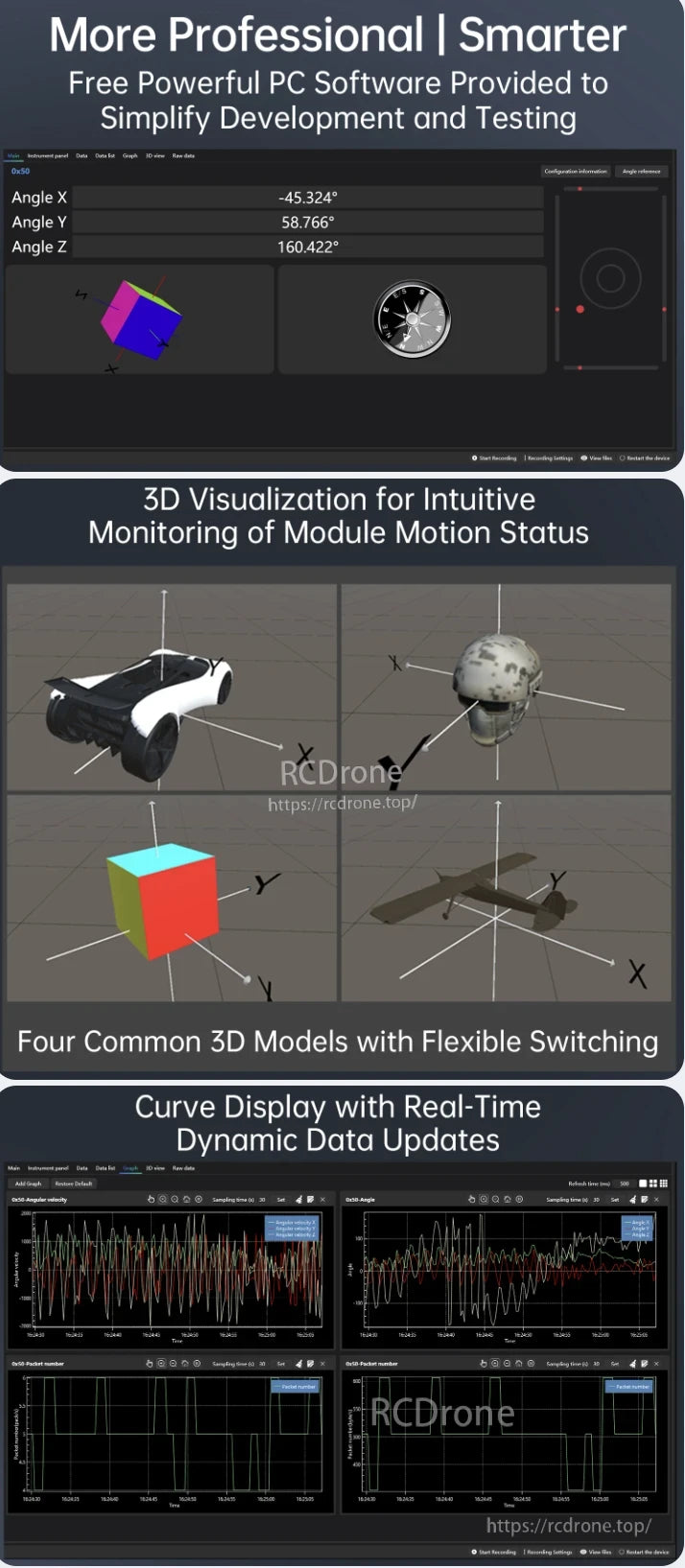
WitMotion HWT601 AGV IMU के लिए पेशेवर पीसी सॉफ़्टवेयर वास्तविक समय में 3D दृश्य, कोण निगरानी, और गतिशील वक्र प्रदर्शन प्रदान करता है।विशेषताएँ सहज गति ट्रैकिंग, लचीला मॉडल स्विचिंग, और कुशल विकास और परीक्षण के लिए लाइव डेटा अपडेट शामिल हैं।
समर्थन दस्तावेज़ों में STM32, Arduino, 51 UART, Windows C++, और Matlab के लिए उदाहरण कार्यक्रम शामिल हैं ताकि डेवलपर्स ट्यूटोरियल और कोड नमूनों का उपयोग करके उत्पाद को लागू कर सकें।
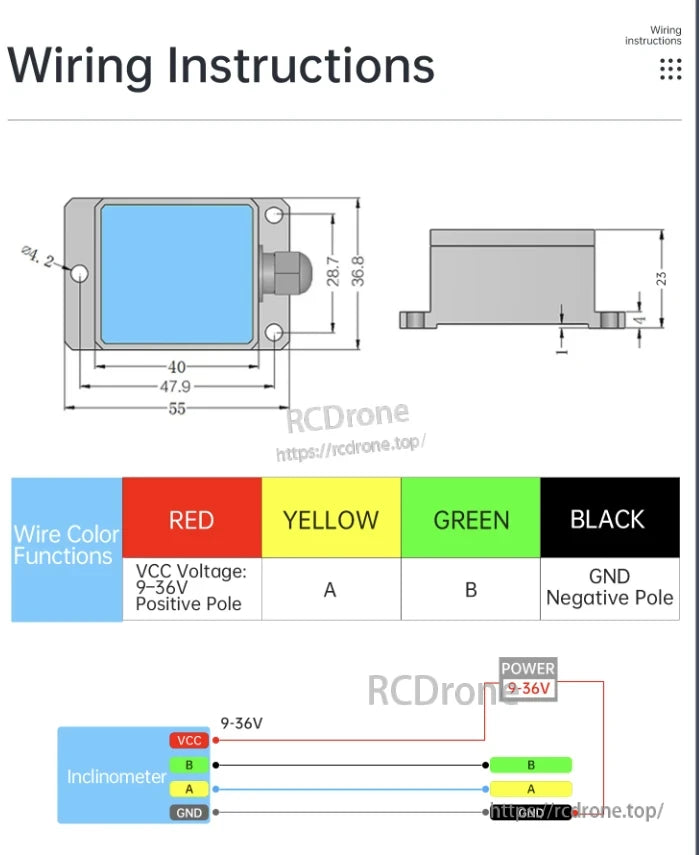
WitMotion HWT601 AGV IMU वायरिंग गाइड: लाल (9-36V), पीला (A), हरा (B), काला (GND)। आयाम और कनेक्शन आरेख प्रदान किया गया है।

WitMotion HWT601 AGV IMU ड्रोन, स्वायत्त ड्राइविंग, मोबाइल रोबोट, और बिना चालक लॉजिस्टिक्स वाहनों के लिए।
Related Collections








