












WitMotion WT901C-485 9-एक्सिस IMU एक्सेलेरोमीटर जायरोस्कोप डिजिटल कंपास (RS485/RS232/TTL), 0.05° कोण सटीकता, 0.2–200 Hz AHRS
WitMotion WT901C-485 9-एक्सिस IMU एक्सेलेरोमीटर जायरोस्कोप डिजिटल कंपास (RS485/RS232/TTL), 0.05° कोण सटीकता, 0.2–200 Hz AHRS
RCDrone
पिकअप उपलब्धता लोड नहीं की जा सकी
Overview
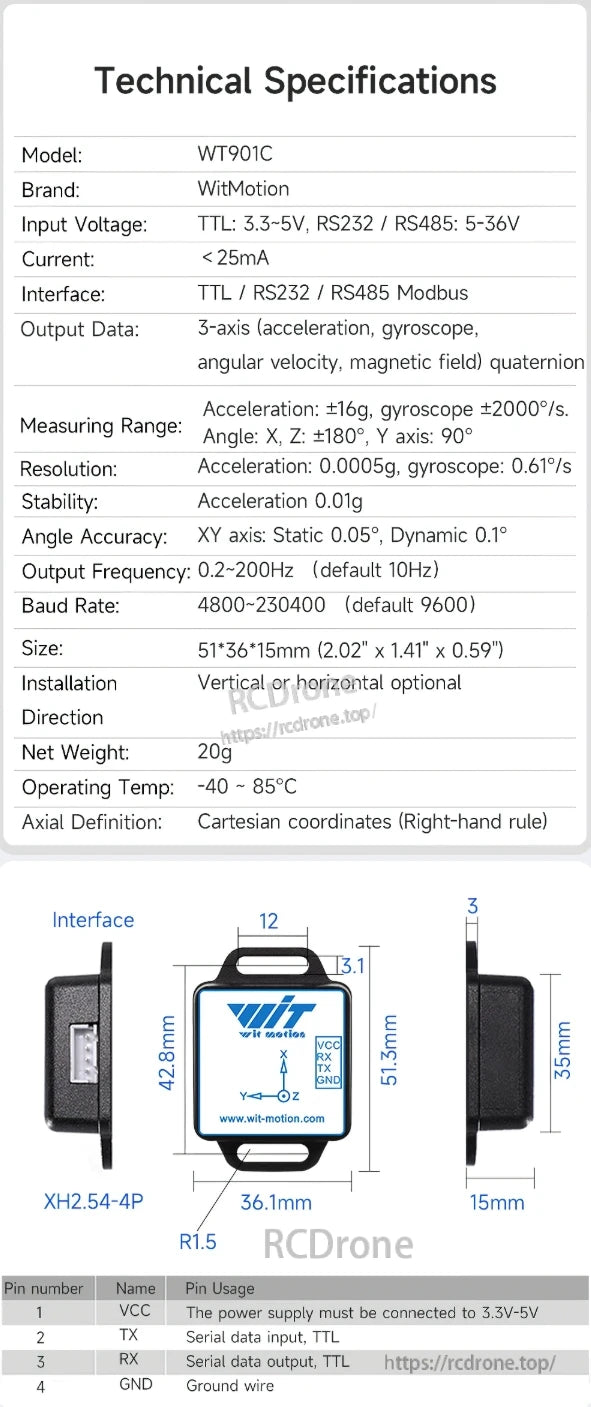
WitMotion WT901C-485 एक कॉम्पैक्ट 9-एक्सिस AHRS IMU है जो एक त्रिअक्षीय MPU9250-क्लास सेंसर सूट (एक्सेलेरोमीटर + जिरोस्कोप + मैग्नेटोमीटर) और WitMotion के फ्यूजन/काल्मन एल्गोरिदम पर आधारित है। यह कोण, त्वरण, कोणीय वेग, चुंबकीय क्षेत्र, और क्वाटरनियन आउटपुट प्रदान करता है जिसमें XY स्थैतिक सटीकता 0.05° (गतिशील 0.1°) और 0.2–200 Hz समायोज्य अपडेट दर है। कई भौतिक इंटरफेस (RS485/RS232 Modbus & TTL UART) और चौड़े इनपुट रेंज WT901C-485 को Arduino/STM32/MCUs, PCs, और औद्योगिक नियंत्रकों के साथ एकीकृत करना आसान बनाते हैं। आधिकारिक Windows सॉफ़्टवेयर (MiniIMU.exe) वास्तविक समय के ग्राफ़, 3D डेमो, डेटा लॉगिंग/निर्यात, और दृश्य चुंबकीय कैलिब्रेशन प्रदान करता है।
मुख्य विशेषताएँ
-
9-एक्सिस आउटपुट: कोण (रोल/पिच/यॉ), 3-एक्सिस acc/gyro/mag, क्वाटरनियन।
-
उच्च स्थिरता &और सटीकता: XY 0.05° स्थिर, 0.1° गतिशील; त्वरण स्थिरता 0.01 g.
-
लचीला I/O: TTL / RS232 / RS485 (Modbus); baud 4,800–230,400 (डिफ़ॉल्ट 9,600).
-
समायोज्य दर: 0.2–200 Hz (डिफ़ॉल्ट 10 Hz).
-
व्यापक आपूर्ति: TTL 3.3–5 V, RS232/RS485 5–36 V; <25 mA सामान्य.
-
उपकरण &और SDKs: Windows ऐप, Android ऐप, CH340/CP2102 ड्राइवर, C/C++/STM32/Arduino/Matlab के लिए नमूना कोड.
-
चुंबकीय कैलिब्रेशन &और 3D डेमो पहली बार सेटअप के लिए; लाइव प्लॉट और TXT निर्यात।
-
औद्योगिक डिज़ाइन: –40~85 °C, 51×36×15 मिमी, ऊर्ध्वाधर या क्षैतिज माउंटिंग।
तकनीकी विशिष्टताएँ
| आइटम | विशिष्टता |
|---|---|
| मॉडल | WT901C (WT901C-485 संस्करण) |
| इंटरफेस | TTL / RS232 / RS485 (Modbus) |
| इनपुट वोल्टेज | TTL: 3.3–5 V; RS232/RS485: 5–36 V |
| वर्तमान | < 25 mA |
| आउटपुट डेटा | त्वरण, कोणीय वेग, चुंबकीय क्षेत्र, कोण, क्वाटरनियन |
| मापने की रेंज | Acc ±16 g, Gyro ±2000 °/s; कोण: X,Z ±180°, Y 90° |
| रिज़ॉल्यूशन | Acc 0.0005 g, Gyro 0.61 °/s |
| स्थिरता | त्वरण 0.01 g |
| कोण सटीकता | XY स्थिर 0.05°, गतिशील 0.1° |
| आउटपुट आवृत्ति | 0.2–200 Hz (डिफ़ॉल्ट 10 Hz) |
| बॉड दर | 4,800–230,400 (डिफ़ॉल्ट 9,600) |
| आकार / वजन | 51×36×15 मिमी, 20 ग्राम |
| संचालनात्मक तापमान | –40 ~ 85 °C |
| ध्रुव | कार्टेशियन, दाहिने हाथ का नियम |
| स्थापना | ऊर्ध्वाधर या क्षैतिज |
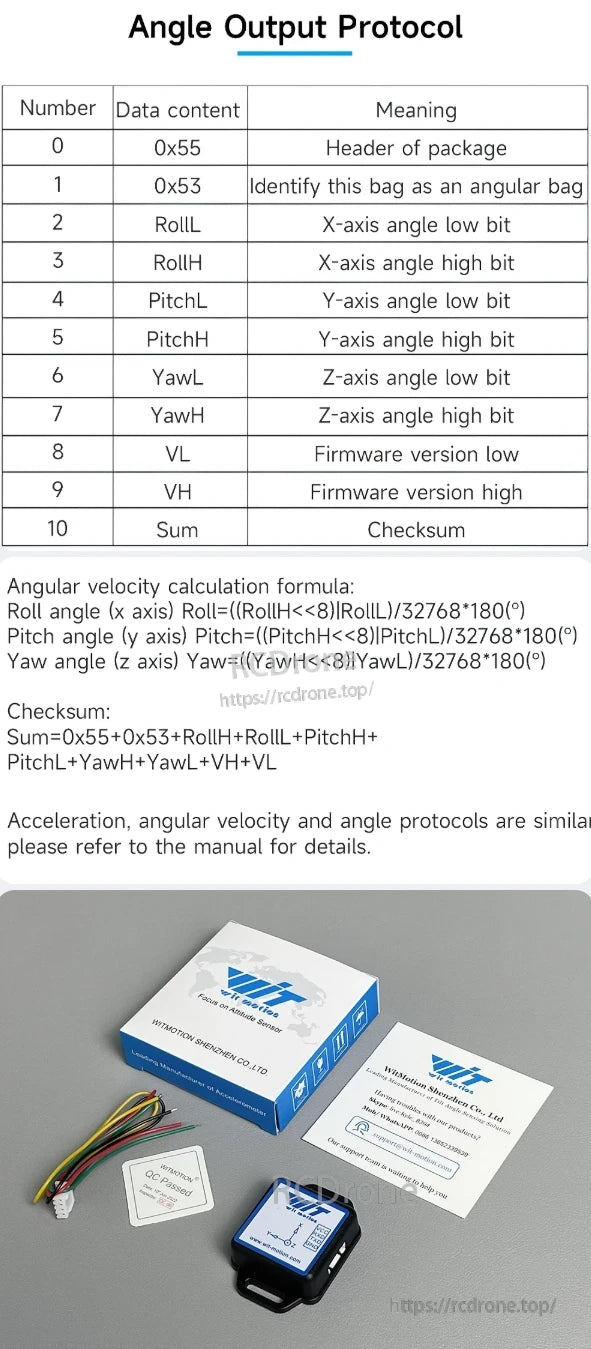
कोण फ्रेम (0x55 0x53) – आउटपुट प्रोटोकॉल
| बाइट अनुक्रमांक | सामग्री | अर्थ |
|---|---|---|
| 0 | 0x55 | पैकेट हेडर |
| 1 | 0x53 | “कोण” फ्रेम ID |
| 2–3 | RollL/RollH | X-axis angle (low/high) |
| 4–5 | PitchL/PitchH | Y-axis angle (low/high) |
| 6–7 | YawL/YawH | Z-axis angle (low/high) |
| 8 | VL | Firmware version low |
| 9 | VH | Firmware version high |
| 10 | Sum | Checksum |
Angle decoding
Roll (°) = ((RollH << 8) | RollL) / 32768 × 180
Pitch (°) = ((PitchH << 8) | PitchL) / 32768 × 180
Yaw (°) = ((YawH << 8) | YawL) / 32768 × 180
चेकसम
योग = 0x55 + 0x53 + रोलएल + रोलएच + पिचएल + पिचएच + यॉएल + यॉएच + वीएल + वीएच।
(त्वरण और कोणीय-गति फ्रेम समान लेआउट शैली का पालन करते हैं—हैंडबुक देखें।)
आयाम &और कनेक्टर
एनक्लोजर का आकार: 51 × 36 × 15 मिमी (H × W × D), माउंटिंग कान के साथ; वजन ≈ 20 ग्राम।
कनेक्टर: XH2.54-4P (सेंसर पर बोर्ड हेडर)।
पिनआउट (TTL संस्करण)
| पिन | नाम | विवरण |
|---|---|---|
| 1 | VCC | पावर इनपुट 3.3–5 V |
| 2 | TX | सीरियल डेटा इनपुट, TTL स्तर |
| 3 | RX | सीरियल डेटा आउटपुट, TTL स्तर |
| 4 | GND | ग्राउंड |
नोट्स: MCU एकीकरण के लिए TTL स्तरों का उपयोग करें। RS232/RS485 प्रकार अपने संबंधित वोल्टेज स्तरों और वायरिंग मानकों का उपयोग करते हैं।
सॉफ़्टवेयर &और उपकरण
-
MiniIMU.exe (Windows): कॉन्फ़िगरेशन (एल्गोरिदम, इंस्टॉलेशन दिशा, रेंज, बैंडविड्थ), वास्तविक समय ग्राफ़, कच्चा/हैक्स दृश्य, डेटा रिकॉर्डिंग और TXT निर्यात.
-
3D डेमो: वास्तविक समय में ओरिएंटेशन का दृश्य (स्रोत उपलब्ध)।
-
दृश्य चुंबकीय कैलिब्रेशन: पूर्वाग्रह को हटाने के लिए अंडाकार-फिट विज़ार्ड (पहली बार उपयोग के लिए अनुशंसित)।
-
ड्राइवर &और कोड: CH340/CP2102 ड्राइवर; STM32, Arduino, C/C++, Matlab के लिए उदाहरण; Android ऐप; PC/फोन डेमो वीडियो।
विशिष्ट अनुप्रयोग
स्वचालन और रोबोटिक्स, समतल प्लेटफार्म, झुकाव-कोण निगरानी, कंपन निगरानी, उपभोक्ता इलेक्ट्रॉनिक्स, IoT सिस्टम एकीकरण, औद्योगिक परीक्षण, VR/AR हेडसेट।
विवरण

लागत-कुशल AHRS IMU जिसमें X Y अक्षों में 0.05° सटीकता है। इसमें झुकाव, कंपन, स्थिति संवेदन शामिल हैं जो WitMotion फ्यूजन एल्गोरिदम का उपयोग करते हैं। इसमें त्वरण, जिरोस्कोप, कोण, चुंबकीय, काल्मन फ़िल्टरिंग, और क्वाटरनियन फ़ंक्शन शामिल हैं।
WitMotion WT901C IMU सेंसर 3-धुरी त्वरण, जिरोस्कोप, कोणीय वेग, और चुंबकीय क्षेत्र संवेदन प्रदान करता है। यह TTL/RS232/RS485 इंटरफेस का समर्थन करता है, इसमें ±16g त्वरण सीमा, ±2000°/s जिरो, 0.05° स्थिर कोण सटीकता है, और यह -40°C से 85°C के बीच कार्य करता है।

WitMotion WT901C IMU सेंसर स्वचालन, VR हेडसेट, स्तर निर्धारण, और कंपन निगरानी प्रदान करता है। अनुप्रयोगों में उपभोक्ता इलेक्ट्रॉनिक्स, IoT एकीकरण, औद्योगिक परीक्षण, और AR/VR शामिल हैं। मुफ्त सॉफ़्टवेयर उपयोगकर्ता के अनुकूल स्थिति माप प्रदान करता है जिसमें वास्तविक समय का कोण डेटा होता है।
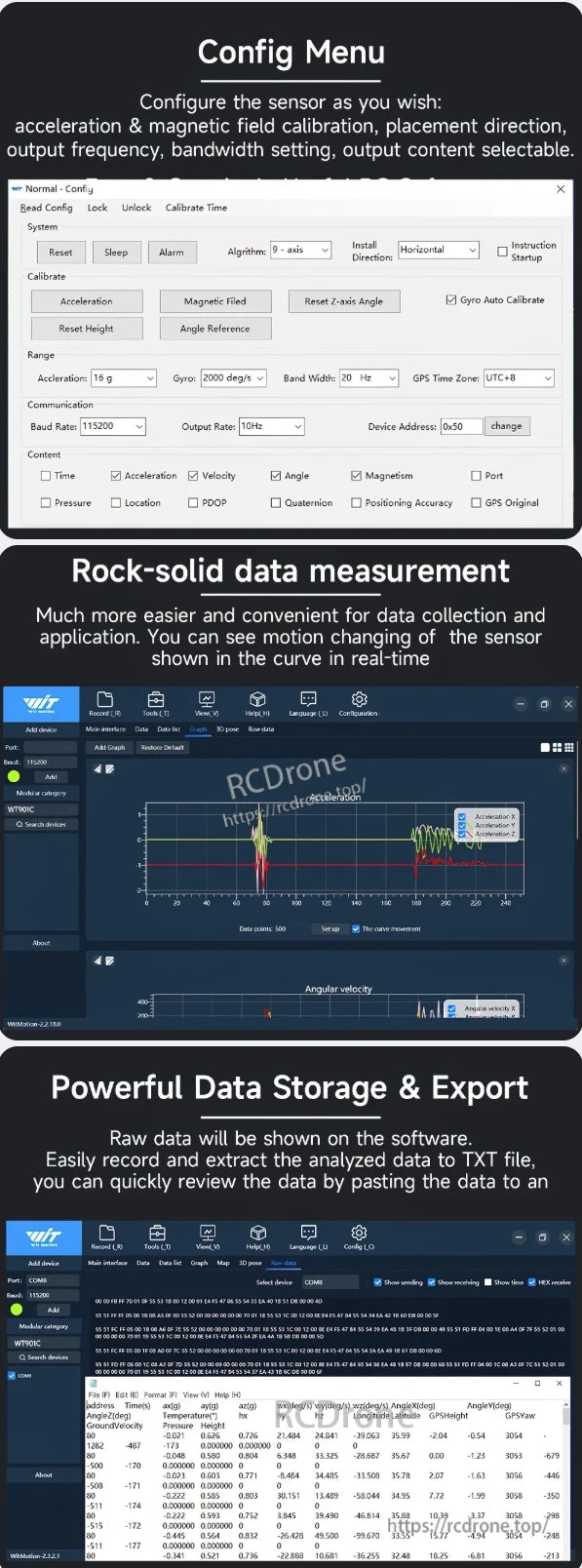
WitMotion WT901C IMU सेंसर त्वरण, चुंबकीय क्षेत्र, और अभिविन्यास के लिए कॉन्फ़िगर करने योग्य सेटिंग्स प्रदान करता है। यह वास्तविक समय डेटा दृश्यता, मजबूत माप प्रदान करता है, और विश्लेषण के लिए TXT प्रारूप में डेटा संग्रहण/निर्यात का समर्थन करता है।
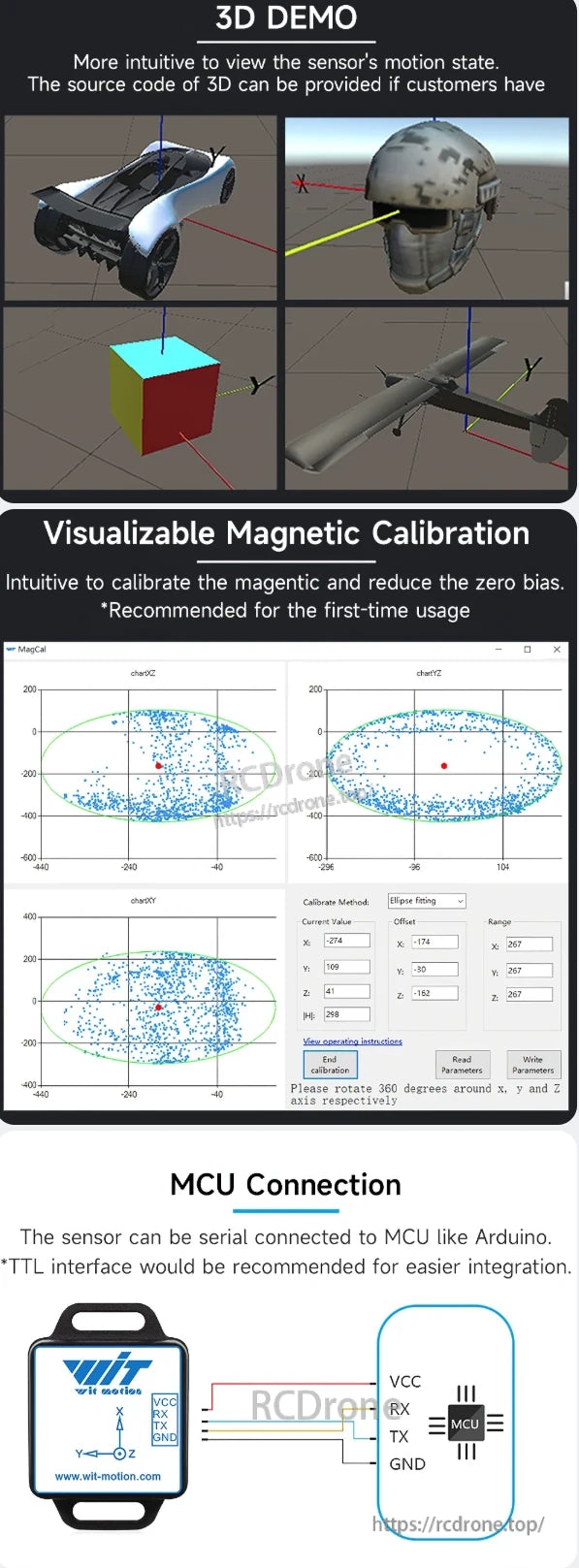
3D डेमो सेंसर गति को कार, हेलमेट, घन, और ड्रोन मॉडलों के साथ दर्शाता है। मैग्नेटिक कैलिब्रेशन इंटरफेस सहज समायोजन की अनुमति देता है। MCU कनेक्शन विवरण TTL इंटरफेस के लिए Arduino के लिए हैं, जिसमें लेबल किए गए VCC, RX, TX, GND पिन शामिल हैं।

डेवलपमेंट किट में मुफ्त Windows सॉफ़्टवेयर, ड्राइवर, मैनुअल, और STM32, Arduino, C++, MATLAB के लिए नमूना कोड शामिल हैं। इसमें WT901C IMU सेंसर के लिए PDF, डेमो वीडियो, और Android ऐप समर्थन शामिल हैं।
IMU सेंसर WT901C कोण आउटपुट प्रोटोकॉल विवरण: डेटा संरचना, कोणीय गणनाएँ, चेकसम फॉर्मूला, पैकेजिंग। इसमें रोल, पिच, यॉ कोण, फर्मवेयर संस्करण, और चेकसम शामिल हैं।
Related Collections












