








WitMotion WTRTK-M ZED-F9P RTK GNSS GPS मॉड्यूल, UAV/कार के लिए सेंटीमीटर-स्तरीय डिफरेंशियल पोजिशनिंग, GPS/GLONASS/Galileo/BeiDou, UART TTL, NMEA/UBX/RTCM
WitMotion WTRTK-M ZED-F9P RTK GNSS GPS मॉड्यूल, UAV/कार के लिए सेंटीमीटर-स्तरीय डिफरेंशियल पोजिशनिंग, GPS/GLONASS/Galileo/BeiDou, UART TTL, NMEA/UBX/RTCM
WitMotion
पिकअप उपलब्धता लोड नहीं की जा सकी
Overview
WTRTK-M एक उच्च-सटीक RTK विभेदक स्थिति मॉड्यूल है जो u-blox ZED-F9P GNSS इंजन पर आधारित है। यह GPS, GLONASS, गैलीलियो, BeiDou और QZSS को एक साथ ट्रैक करता है और RTK सुधार के बाद सेंटीमीटर-स्तरीय सटीकता प्रदान करता है। यह मॉड्यूल डुअल-फ्रीक्वेंसी रिसेप्शन, 5 Hz वास्तविक समय आउटपुट मानचित्रण/स्वायत्त अनुप्रयोगों के लिए, और मोबाइल/बेस स्टेशनों और मार्ग दृश्यांकन के लिए एक PC टूल प्रदान करता है। एंटी-इंटरफेरेंस और कैलिब्रेशन तकनीकें डेटा की स्थिरता और सुरक्षा को बढ़ाती हैं.
मुख्य विशेषताएँ
-
सेंटीमीटर-स्तरीय RTK: मोबाइल/बेस कार्यप्रवाह के साथ त्वरित समेकन.
-
मल्टी-कॉन्स्टेलेशन, डुअल-फ्रीक्वेंसी: GPS L1/L2; GLONASS G1/G2; BeiDou B1/B2; गैलीलियो E1/E5b; QZSS L1/L2.
-
उच्च संवेदनशीलता &और तेज़ प्रारंभ: 184 चैनल; ठंडा प्रारंभ 24 सेकंड, गर्म प्रारंभ 2 सेकंड, पुनः प्राप्ति 2 सेकंड; संकुचन ≤10 सेकंड।
-
समय/हेडिंग प्रदर्शन: 1PPS RMS 30 ns (99% 60 ns); हेडिंग सटीकता 0.4° (गतिशील 0.3°)।
-
समृद्ध प्रोटोकॉल: NMEA, UBX, RTCM 3.3; कैरियर-फेज (RAWX) समर्थित।
-
कॉन्फ़िगर करने योग्य दर &और 1 PPS: 0.25–20 Hz अपडेट (डिफ़ॉल्ट 1 Hz); दूसरा पल्स 0.25 Hz–10 MHz (डिफ़ॉल्ट अवधि 1 सेकंड, उच्च स्तर ~100 ns)।
-
डुअल UART (TTL) और SMA-K / IPEX एंटीना विकल्प; ट्रैक देखने और डिवाइस सेटअप के लिए पीसी सॉफ़्टवेयर।
-
अनुप्रयोग दृश्य: UAV सर्वेक्षण/मानचित्रण, स्वायत्त ट्रैक्टर/AGV, उच्च-सटीकता वाहन नेविगेशन, रोबोटिक्स।
आरटीके कैसे काम करता है (संक्षेप में)
एक स्थिर बेस स्टेशन उपग्रह-आधारित माप त्रुटि की गणना करता है और इसके ज्ञात स्थान की तुलना करता है और आरटीसीएम विभेदक डेटा प्रसारित करता है। मोबाइल स्टेशन इन सुधारों को लागू करता है ताकि वास्तविक समय में, सेंटीमीटर-स्तरीय स्थिति प्राप्त की जा सके।
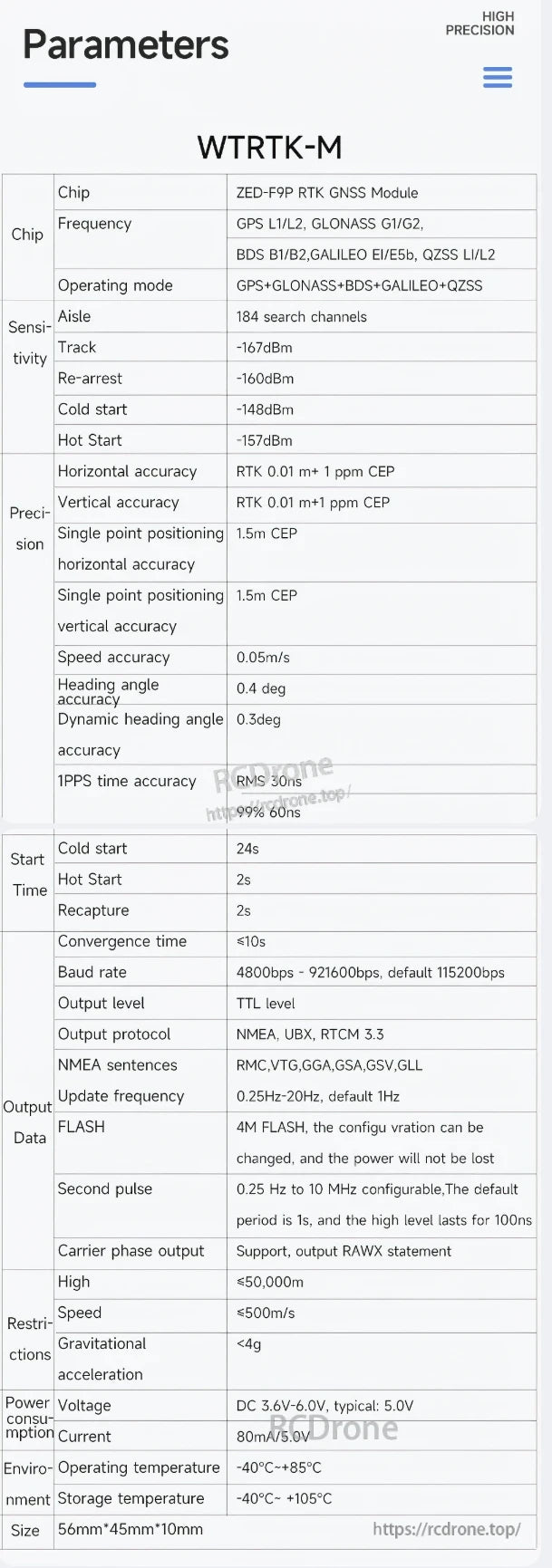
htmlमुख्य विनिर्देश
| आइटम | विशेषता |
|---|---|
| GNSS चिप | ZED-F9P RTK GNSS मॉड्यूल |
| नक्षत्र/बैंड | GPS L1/L2, GLONASS G1/G2, BeiDou B1/B2, Galileo E1/E5b, QZSS L1/L2 |
| चैनल | 184 खोज चैनल |
| संवेदनशीलता | ट्रैकिंग -167 dBm; पुनः अधिग्रहण -160 dBm; ठंडा प्रारंभ -148 dBm; गर्म प्रारंभ -157 dBm |
| RTK सटीकता (CEP) | क्षैतिज/ऊर्ध्वाधर: 0.01 मीटर + 1 ppm CEP |
| एकल-बिंदु सटीकता (CEP) | क्षैतिज 1.5 मीटर, ऊर्ध्वाधर 1. 5 मीटर |
| गति सटीकता | 0.05 मीटर/सेकंड |
| हेडिंग सटीकता | 0.4° (गतिशील 0.3°) |
| 1PPS समय सटीकता | RMS 30 ns, 99% 60 ns |
| शुरू/पुनः प्राप्ति | ठंडा 24 सेकंड, गर्म 2 सेकंड, पुनः प्राप्ति 2 सेकंड; संकुचन ≤10 सेकंड |
| बॉड दर | 4 800–921 600 bps (डिफ़ॉल्ट 115 200 bps) |
| इलेक्ट्रिकल स्तर | TTL |
| प्रोटोकॉल | NMEA, UBX, RTCM 3.3; NMEA वाक्य: RMC/VTG/GGA/GSA/GSV/GLL |
| अपडेट दर | 0.25–20 Hz (डिफ़ॉल्ट 1 Hz); नोट: बहुत उच्च दरें अनुक्रमिक लोड बढ़ाती हैं—विश्वसनीयता के लिए ≤ 5 Hz रखें |
| ऑनबोर्ड फ्लैश | 4 MB, पावर-ऑफ के बाद कॉन्फ़िगरेशन बनाए रखता है |
| कैरियर फ़ेज | RAWX आउटपुट समर्थित |
| प्रतिबंध | ऊँचाई ≤ 50 000 मीटर; गति ≤ 500 मीटर/सेकंड; त्वरण < 4 g |
| सप्लाई | DC 3.6–6.0 V (प्रकारिक 5.0 V), ≈ 80 mA @ 5 V |
| ऑपरेटिंग / भंडारण | -40 °C से +85 °C / -40 °C से +105 °C |
| आयाम | 56 × 45 × 10 मिमी (फ्रंट डायग्राम मार्क्स ~46 मिमी ऊँचाई) |
इंटरफेस &और संकेतक
एंटीना: SMA-K (IPEX विकल्प के साथ)।
UART पोर्ट (TTL, प्रत्येक 4-पिन):
-
P1 (दाएं) – VI (3.6–6.0 V, 5 V रेक.), G (GND), T1 (TX), R1 (RX).
-
P2 (बाएं) – VO (3.6–6.0 V, 5 V रेक.), G (GND), T2 (TX), R2 (RX).
P2 का उपयोग RTC इनपुट/आउटपुट के लिए किया जाता है; P1 NMEA डेटा आउटपुट करता है। P1/P2 VCC आंतरिक रूप से जुड़े हुए हैं—किसी एक से पावर।
LEDs
-
PWR: लाल ON = पावर लागू है।
-
TX1/TX2: हरा झपकता है = पोर्ट में डेटा आउटपुट है।
-
PPS: फिक्स से पहले बंद; नीला झपकता है 3D स्थिति निर्धारण के बाद।
-
RTK: RTK में न होने पर बंद; नीला झपकता है RTK Float में; RTK Fixed में चालू।
कनेक्शन &और सॉफ़्टवेयर
-
वायर सेटअप: एंटीना को SMA से कनेक्ट करें; UART1 को PC से कनेक्ट करें ताकि स्थान डेटा देखा जा सके।
-
बेस/मोबाइल: एक मॉड्यूल को बेस के रूप में सेट करें (आउटपुट RTCM); मोबाइल RTCM का उपभोग करता है ताकि RTK प्राप्त किया जा सके—मोबाइल को सुधार प्राप्त करने के बाद सीधे RTK रोवर के रूप में उपयोग किया जा सकता है।
-
पीसी सॉफ़्टवेयर: ट्रैक दृश्य, डेटा दृश्य, और एक-क्लिक बेस/रोवर कॉन्फ़िगरेशन।
नोट्स
-
डिफ़ॉल्ट बौड 115 200 bps है। यदि आप आउटपुट फ़्रीक्वेंसी बढ़ाते हैं, तो ओवरफ़्लो से बचने के लिए बौड को तदनुसार बढ़ाएं (व्यावहारिक ऊपरी दर ≤ 5 Hz मानक लिंक पर)।
-
कस्टम विकास समर्थित है।
विवरण
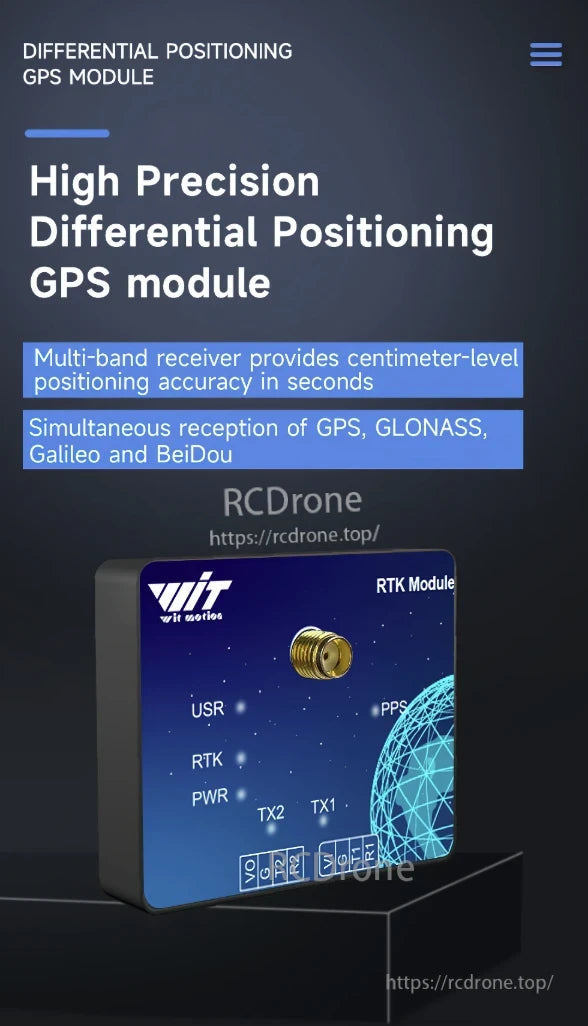
सेंटीमीटर स्तर की सटीकता के साथ उच्च सटीकता वाला डिफरेंशियल पोजिशनिंग GPS मॉड्यूल। GPS, GLONASS, गैलीलियो, BeiDou का समर्थन करता है।मल्टी-बैंड रिसीवर, RTK तकनीक, PPS, TX1, TX2, USR, RTK, PWR संकेतक।
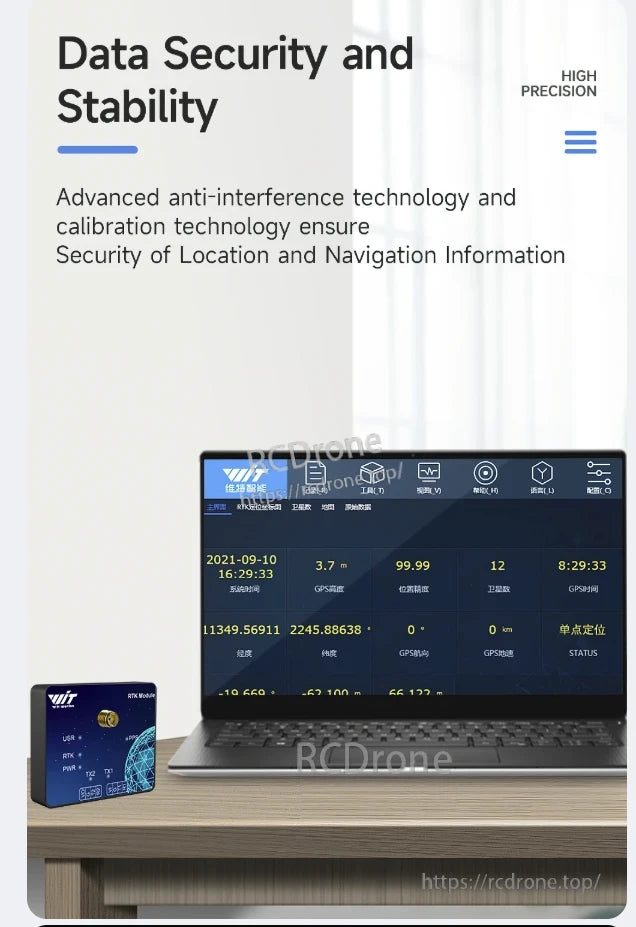
WitMotion WTRTK-M ZED-F9P RTK GNSS GPS उन्नत एंटी-इंटरफेरेंस और कैलिब्रेशन तकनीक के साथ उच्च सटीकता डेटा सुरक्षा और स्थिरता सुनिश्चित करता है, जो विश्वसनीय स्थान और नेविगेशन जानकारी के लिए है।
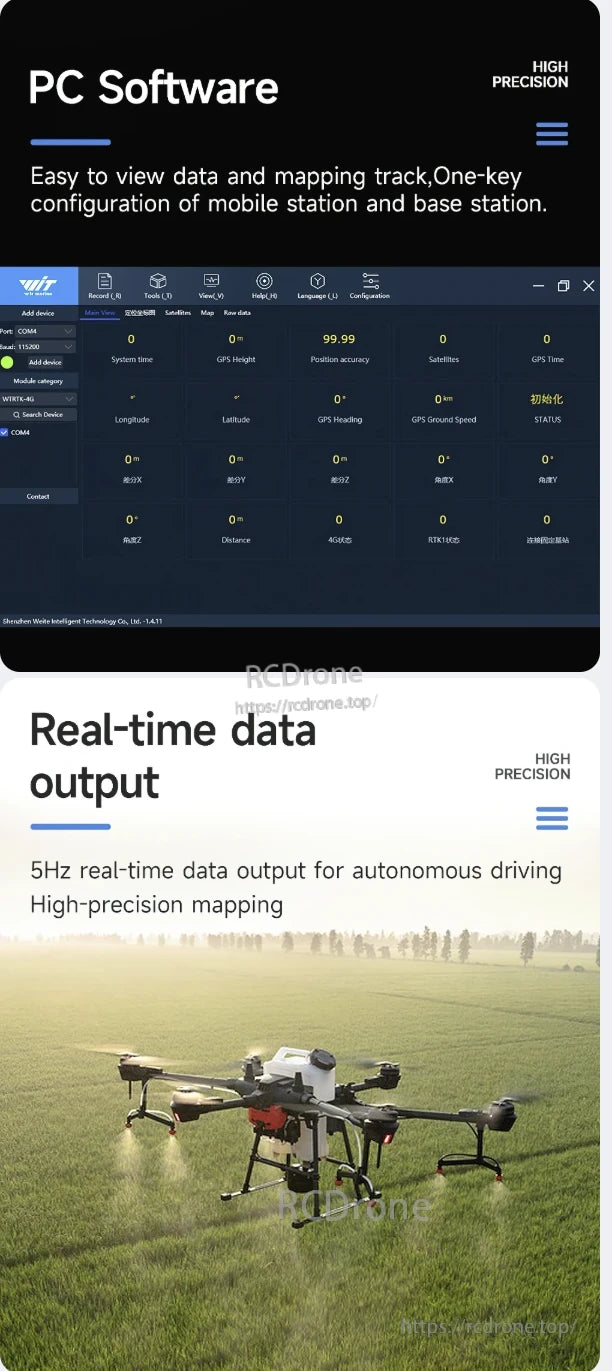
उच्च-सटीक RTK GNSS GPS सॉफ़्टवेयर 5Hz वास्तविक समय डेटा आउटपुट के साथ स्वायत्त ड्राइविंग और मानचित्रण के लिए। एक-क्लिक सेटअप, उपग्रह ट्रैकिंग, सटीक स्थिति निर्धारण, और विस्तृत टेलीमेट्री का समर्थन करता है।
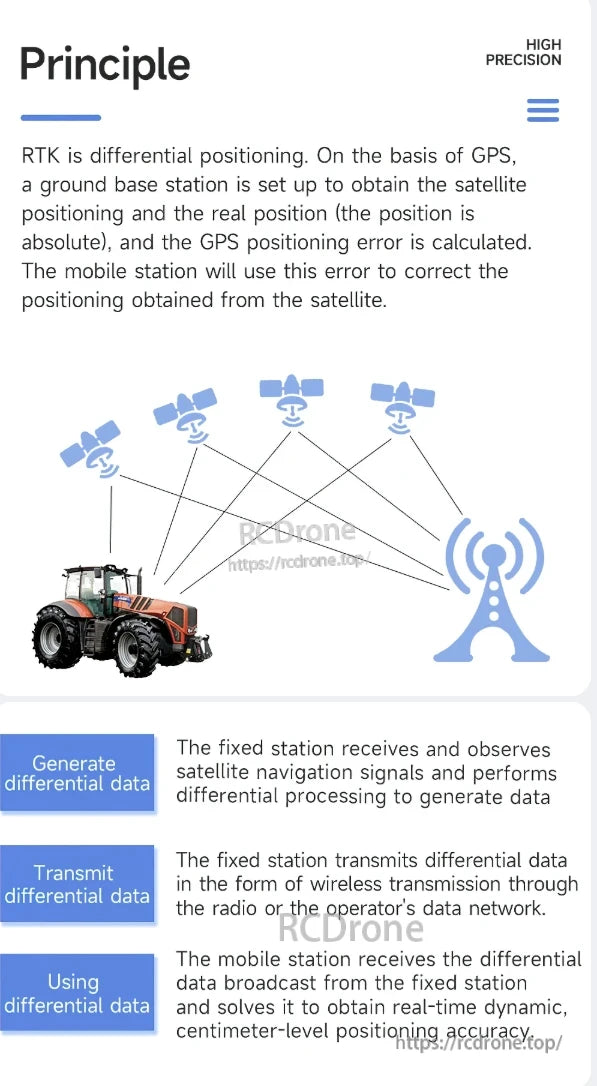
RTK GPS के साथ विभेदक स्थिति निर्धारण का उपयोग करता है। एक निश्चित स्टेशन उपग्रह स्थिति त्रुटियों की गणना करता है और मोबाइल स्टेशन को वायरलेस रूप से सुधार भेजता है, जिससे सटीक नेविगेशन के लिए सेंटीमीटर स्तर की वास्तविक समय सटीकता सक्षम होती है।
WTRTK-M में मल्टी-कॉन्स्टेलेशन समर्थन के साथ ZED-F9P RTK GNSS मॉड्यूल है, उच्च सटीकता (0।01m), तेज़ प्रारंभ समय, कई प्रोटोकॉल, और -40°C से +85°C तक कार्य करता है।


WitMotion RTK मॉड्यूल के लिए वायर्ड कनेक्शन आरेख: बेस/मोबाइल स्टेशन सेटअप, SMA एंटीना, UART1 PC कनेक्शन। इसमें सॉफ़्टवेयर, मैनुअल, वीडियो, और प्रोटोकॉल संसाधन शामिल हैं।
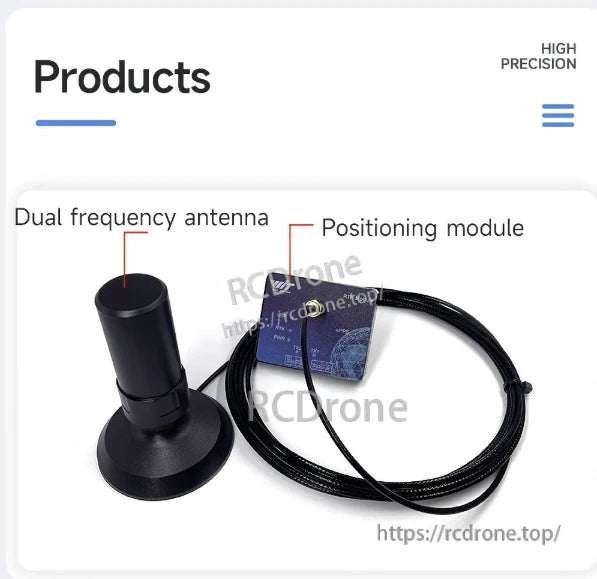
उच्च सटीकता GNSS GPS के लिए डुअल फ़्रीक्वेंसी एंटीना और पोजिशनिंग मॉड्यूल
Related Collections








