Yahboom CMP10A 10-एक्सिस IMU सेंसर मॉड्यूल ROS रोबोट्स के लिए, जाइरो/एक्सेल/मैग/बैरो, USB UART I2C
Yahboom CMP10A 10-एक्सिस IMU सेंसर मॉड्यूल ROS रोबोट्स के लिए, जाइरो/एक्सेल/मैग/बैरो, USB UART I2C
Yahboom
पिकअप उपलब्धता लोड नहीं की जा सकी
अवलोकन
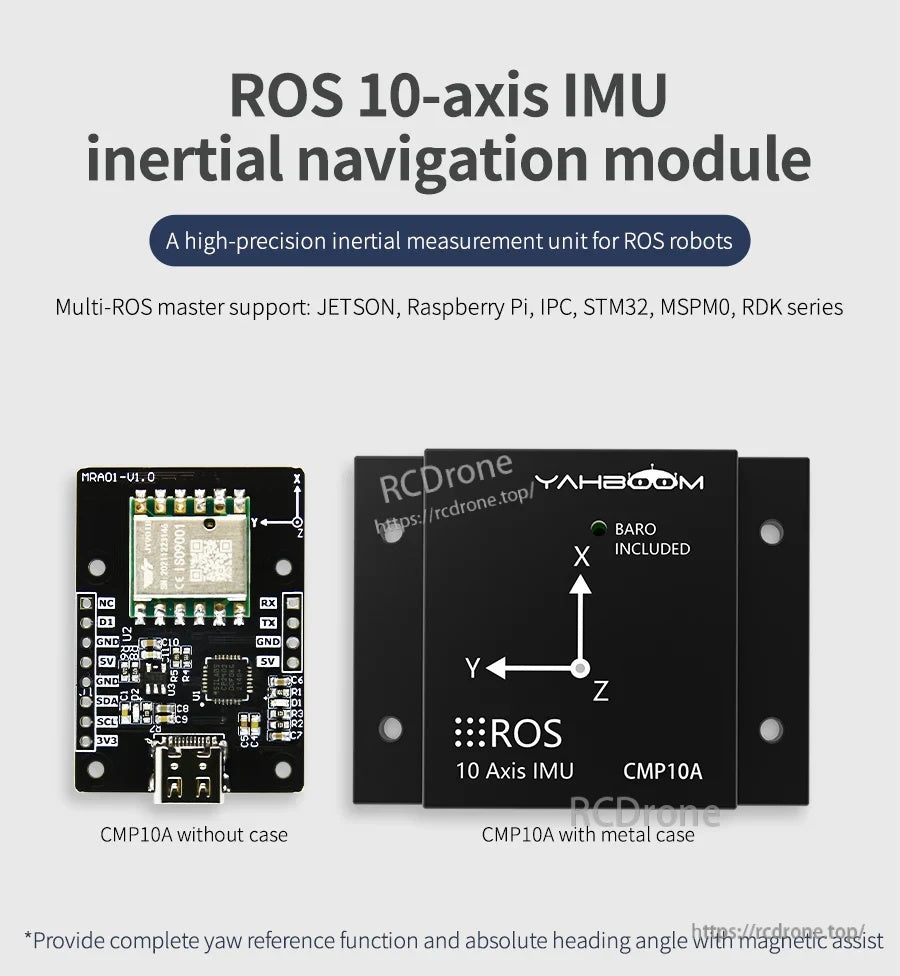
Yahboom CMP10A एक 10-धुरी IMU सेंसर मॉड्यूल (इनर्शियल नेविगेशन / AHRS मॉड्यूल) है जिसे ROS रोबोटों और एम्बेडेड कंट्रोलर्स के लिए डिज़ाइन किया गया है। यह 3-धुरी जिरोस्कोप, 3-धुरी एक्सेलेरोमीटर, 3-धुरी मैग्नेटोमीटर, और बैरोमीटर (वायु दबाव गेज) को एकीकृत करता है ताकि एटीट्यूड और गति डेटा जैसे कि यूलर कोण (रोल, पिच, यॉ), क्वाटरनियन, कोणीय वेग, त्वरण, और मैग्नेटिक फील्ड वेक्टर को आउटपुट किया जा सके। यह मॉड्यूल रोबोटिक्स और नेविगेशन प्रोजेक्ट्स में लचीले एकीकरण के लिए USB/UART/I2C संचार का समर्थन करता है।
मुख्य विशेषताएँ
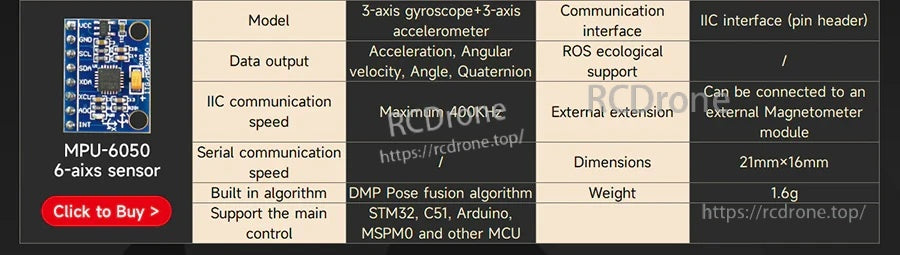
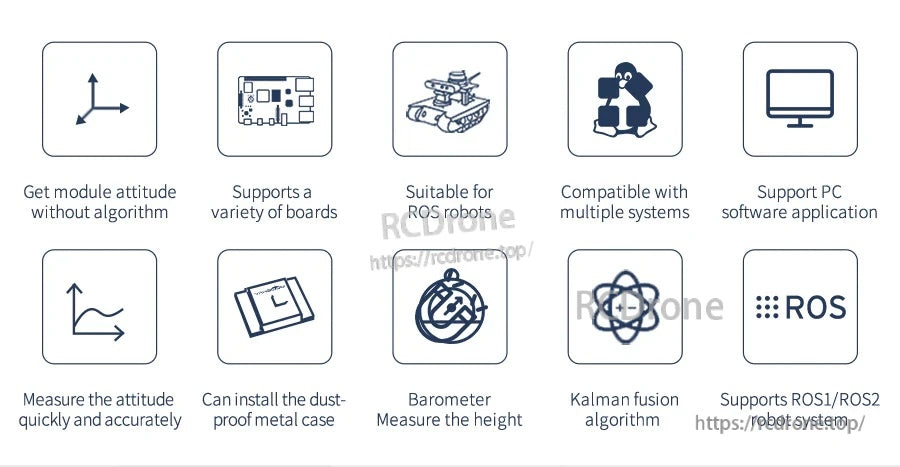
- 10-धुरी सेंसर सेट: 3-धुरी जिरोस्कोप + 3-धुरी एक्सेलेरोमीटर + 3-धुरी मैग्नेटोमीटर + बैरोमीटर।
- निर्मित फ्यूजन एल्गोरिदम: काल्मन फ्यूजन एल्गोरिदम प्रदान किया गया है; सामग्री में एटीट्यूड-डायनामिक्स कोर एल्गोरिदम और AHRS एटीट्यूड डेटा फ्यूजन का भी वर्णन किया गया है।
- वास्तविक समय के आउटपुट (जैसा कि वर्णित है): चुंबकीय क्षेत्र वेक्टर, त्वरण, जाइरोस्कोप डेटा, यूलेर कोण (रोल/पिच/यॉ), क्वाटरनियन; सामग्री में स्थिति, वेग, ऊँचाई, वायु दबाव, तापमान, समय, और पोर्ट स्थिति भी सूचीबद्ध हैं।
- अपडेट/वापसी दर 200 Hz तक।
- सीरियल बौड दर 921600 bps तक (डिफ़ॉल्ट 9600 bps भी सूचीबद्ध है)।
- इंटरफेस: USB (टाइप-C), UART/सीरियल TTL, और I2C (IIC)।
- ROS पारिस्थितिकी तंत्र समर्थन: ROS1 और ROS2 का समर्थन करता है।
- धातु केस विकल्प: गर्मी के अपव्यय में मदद करता है, बाहरी हस्तक्षेप को कम करता है, और धूल-प्रूफ सुरक्षात्मक आवरण के रूप में उपयोग किया जा सकता है।
- NMEA-0183 के अनुसार सीरियल GPS डेटा स्वीकार करता है ताकि एक GPS-IMU एकीकृत नेविगेशन यूनिट (GPS मॉड्यूल के साथ) का निर्माण किया जा सके।
- पैरामीटर समायोजन और वास्तविक समय की स्थिति दृश्यता के लिए PC सॉफ़्टवेयर समर्थन 3D मॉडल के माध्यम से (जैसा कि वर्णित है)।
विशेषताएँ
| मॉडल / श्रृंखला | CMP10A (ROS 10 अक्ष IMU) |
|---|---|
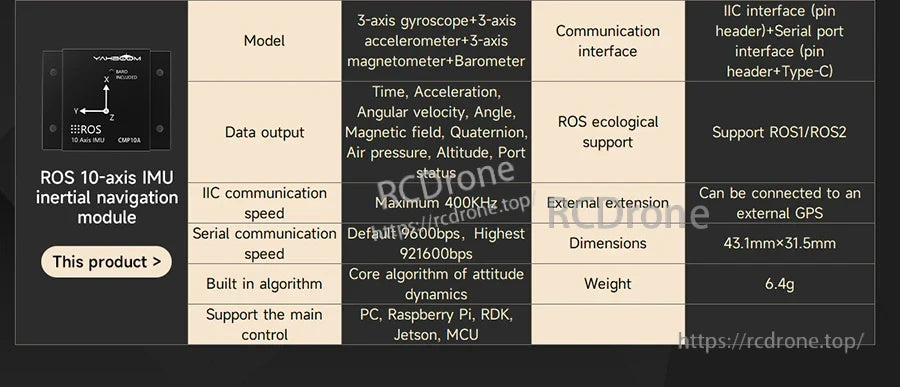
| सेंसर | 3-धुरी जिरोस्कोप + 3-धुरी एक्सेलेरोमीटर + 3-धुरी मैग्नेटोमीटर + बैरोमीटर |
| अपडेट / रिटर्न दर | 200 Hz तक |
| सीरियल संचार गति | डिफ़ॉल्ट 9600 bps; उच्चतम 921600 bps (एक अन्य सामग्री उच्च-परिशुद्धता 10-धुरी बोर्ड के लिए 115200 bps सूचीबद्ध करती है) |
| I2C (IIC) संचार गति | अधिकतम 400 kHz (एक अन्य सामग्री उच्च-परिशुद्धता 10-धुरी बोर्ड के लिए अधिकतम 100 kHz सूचीबद्ध करती है) |
| संचार इंटरफेस | IIC इंटरफेस (पिन हेडर) + सीरियल पोर्ट इंटरफेस (पिन हेडर) + टाइप-C |
| ROS समर्थन | ROS1 / ROS2 का समर्थन करता है |
| बाहरी विस्तार | बाहरी GPS से जोड़ा जा सकता है |
| आयाम | 43.1 मिमी x 31.5 मिमी (अन्य सामग्री सूचीबद्ध 24.5 मिमी x 31 मिमी) |
| वजन | 6.4 ग्राम (अन्य सामग्री सूचीबद्ध 3.9 ग्राम) |
| स्थिर कोण आउटपुट (सूचीबद्ध) | यॉ कोण: 0.5° आरएमएस; स्थिति: 0.1° RMS |
| कोण आउटपुट (सूचीबद्ध) | 360° स्थिर और निरंतर कोण आउटपुट |
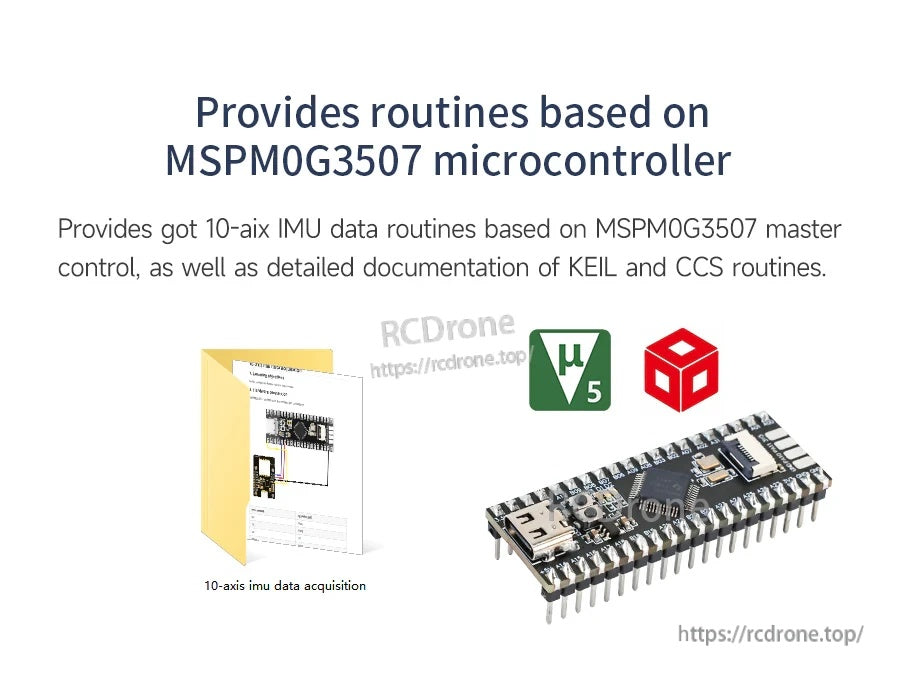
| समर्थित मुख्य नियंत्रक (सूचीबद्ध) | PC, Raspberry Pi, RDK, Jetson, MCU; Jetson, Raspberry Pi, IPC, STM32, MSPM0, RDK श्रृंखला के लिए मल्टी-ROS मास्टर समर्थन भी सूचीबद्ध है |
क्या शामिल है
- CMP10A
- CMP10A केस के साथ
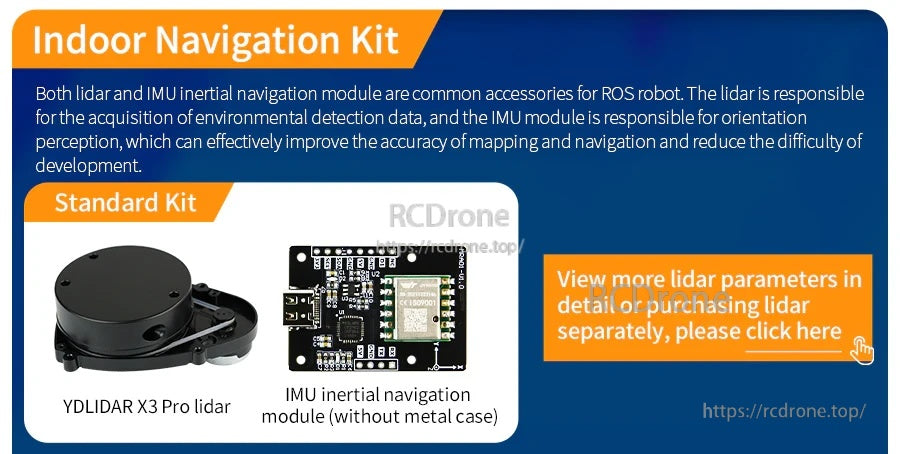
- CMP10A धातु केस + YDLIDAR X3 के साथ
- CMP10A + GPS स्थिति निर्धारण मॉड्यूल
अनुप्रयोग
- ROS रोबोट स्थिति संवेदन, अभिविन्यास अनुमान, और नेविगेशन विकास
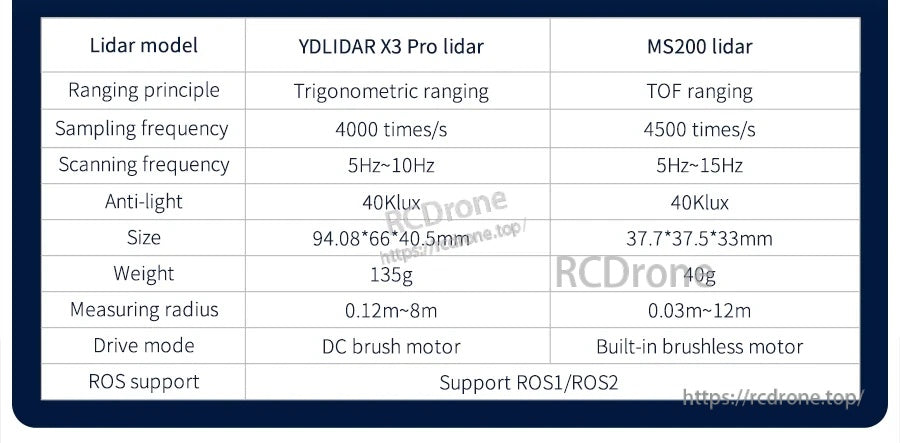
- लिडार या GPS मॉड्यूल के साथ जोड़े जाने पर रोबोटिक्स मानचित्रण/नेविगेशन कार्यप्रवाह (विकल्प उपलब्ध)
- PC, Raspberry Pi, Jetson, और MCU प्लेटफार्मों के लिए एम्बेडेड IMU/AHRS डेटा अधिग्रहण
पूर्व-सेल चयन सहायता के लिए (CMP10A बनाम धातु केस बनाम GPS/lidar बंडल) या एकीकरण समर्थन के लिए, संपर्क करें https://rcdrone.top/ या ईमेल करें [email protected].
विवरण


CMP10A एक 3-धुरी जिरो, एक्सेलेरोमीटर, मैग्नेटोमीटर, और बैरोमीटर को USB/UART/I2C विकल्पों के साथ रोबोटिक्स एकीकरण के लिए एकीकृत करता है।
संक्षिप्त निर्माण के लिए नग्न बोर्ड चुनें या अतिरिक्त सुरक्षा और बेहतर गर्मी अपव्यय के लिए धातु केस विकल्प चुनें।

वास्तविक समय AHRS/IMU आउटपुट के लिए निर्मित, मॉड्यूल नियंत्रण और नेविगेशन के लिए यूलेर कोण और क्वाटरनियन जैसे स्थिति डेटा प्रदान करता है।
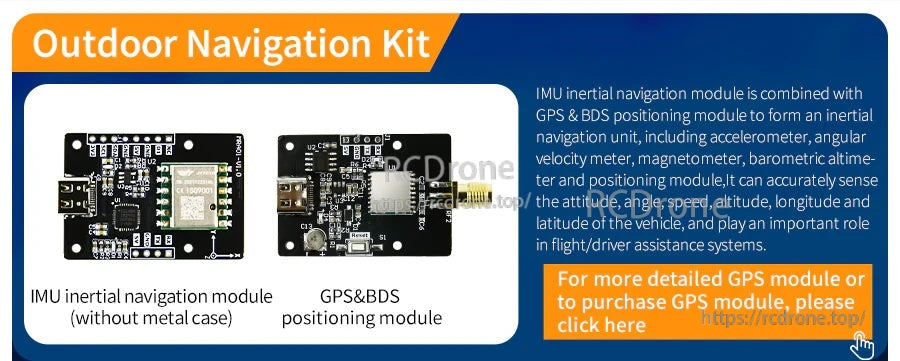
बाहरी GPS मॉड्यूल जोड़ें ताकि बाहरी स्थिति परियोजनाओं के लिए GPS‑IMU एकीकृत नेविगेशन सेटअप बनाया जा सके।
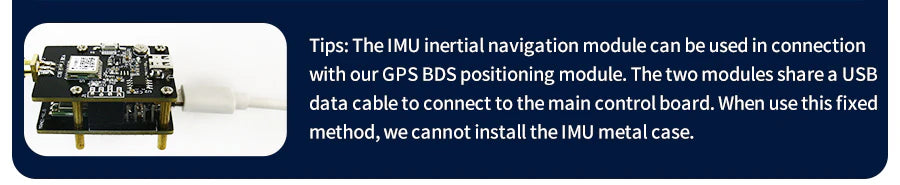
USB केबलिंग IMU और वैकल्पिक GPS बोर्ड को मुख्य नियंत्रण कंप्यूटर से डेटा इनपुट के लिए जोड़ना आसान बनाती है।

ROS1 और ROS2 संगतता सामान्य रोबोटिक्स स्टैक्स में सेंसर लाने की प्रक्रिया को सरल बनाती है।
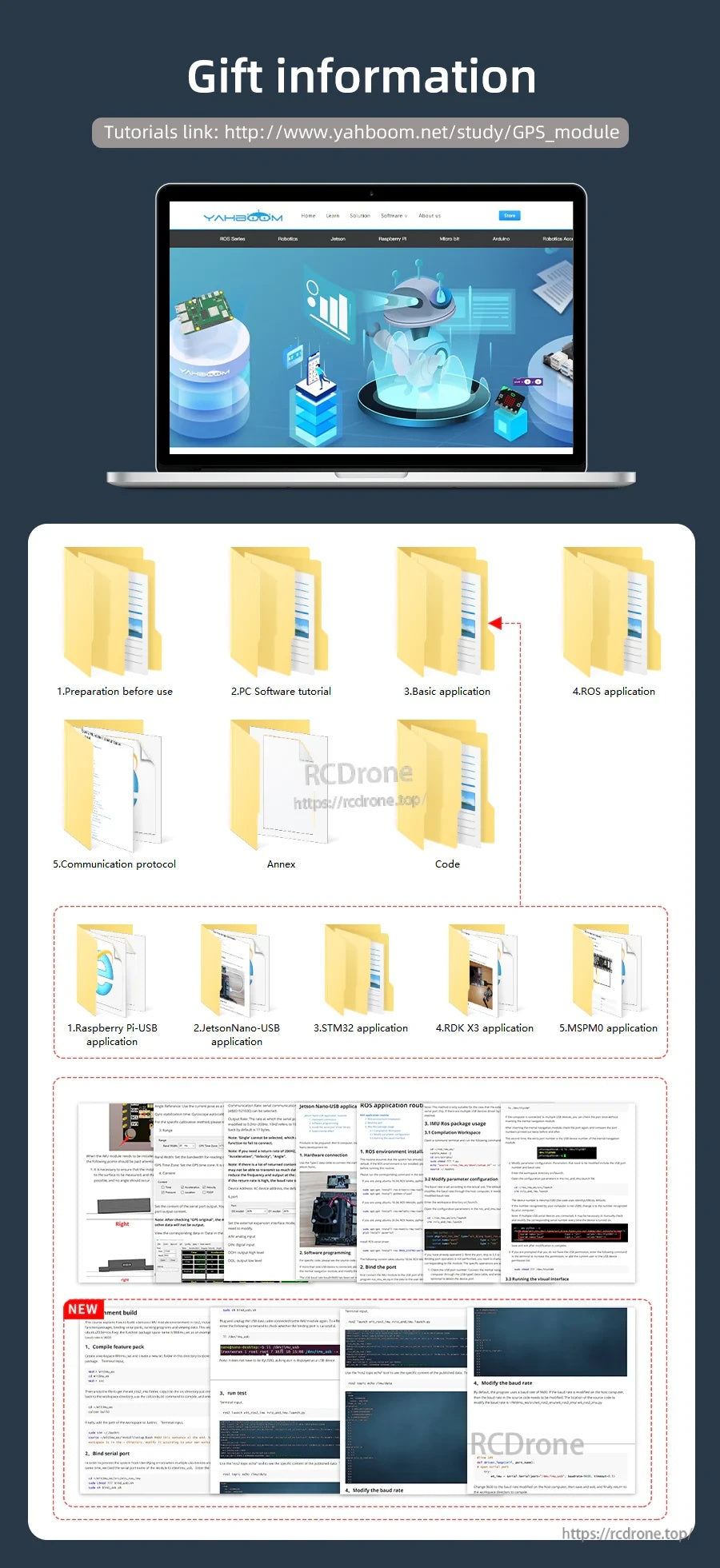
दस्तावेज़, नमूना कोड, और पीसी उपकरण विकास के दौरान पैरामीटर सेटअप और डेटा विज़ुअलाइज़ेशन को तेज़ करने के लिए प्रदान किए जाते हैं।

उच्च दर का आउटपुट और ऑनबोर्ड फ्यूजन समर्थन एम्बेडेड कंट्रोलर्स और ROS रोबोट्स के लिए प्रतिक्रियाशील स्थिति फीडबैक प्रदान करता है।
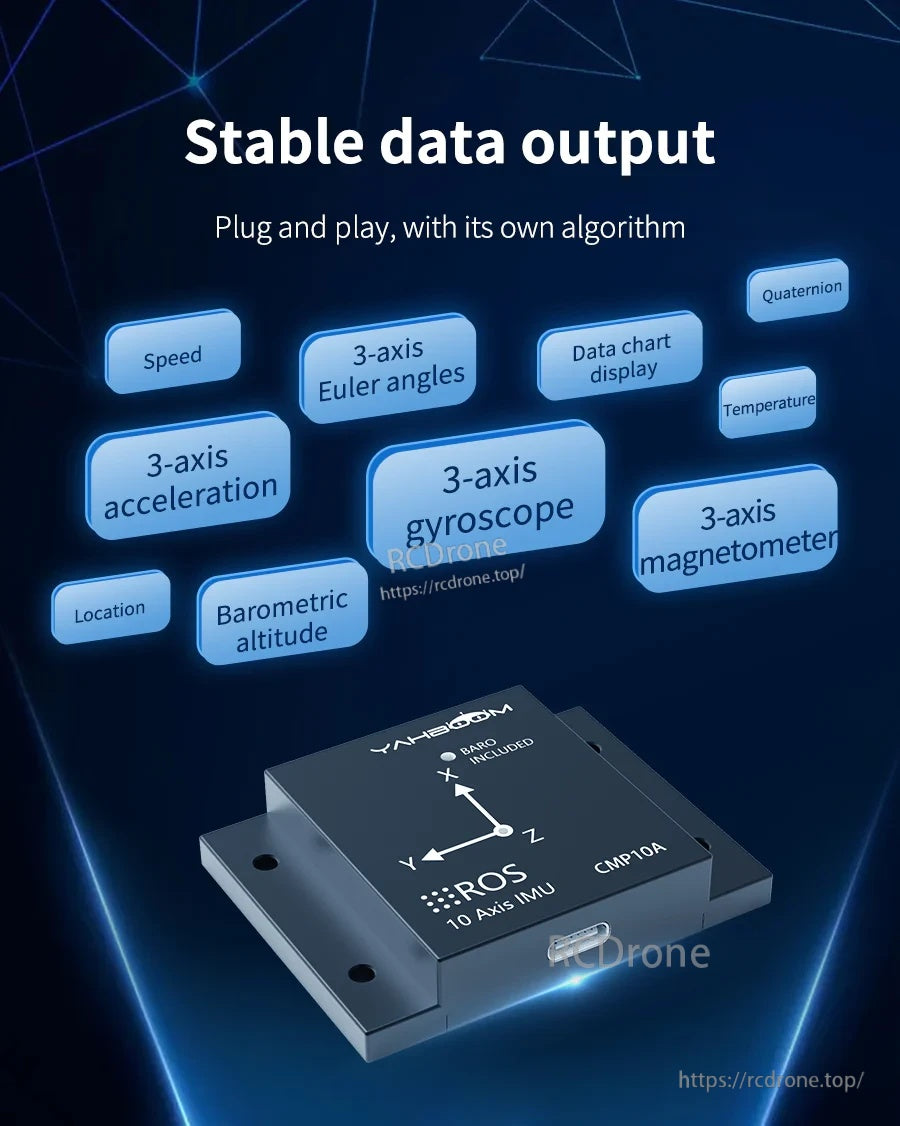
प्लग-एंड-प्ले डेटा आउटपुट में गति ट्रैकिंग के लिए त्वरण, कोणीय वेग, चुंबकीय क्षेत्र, यूलेर कोण, और क्वाटरनियन शामिल हैं।
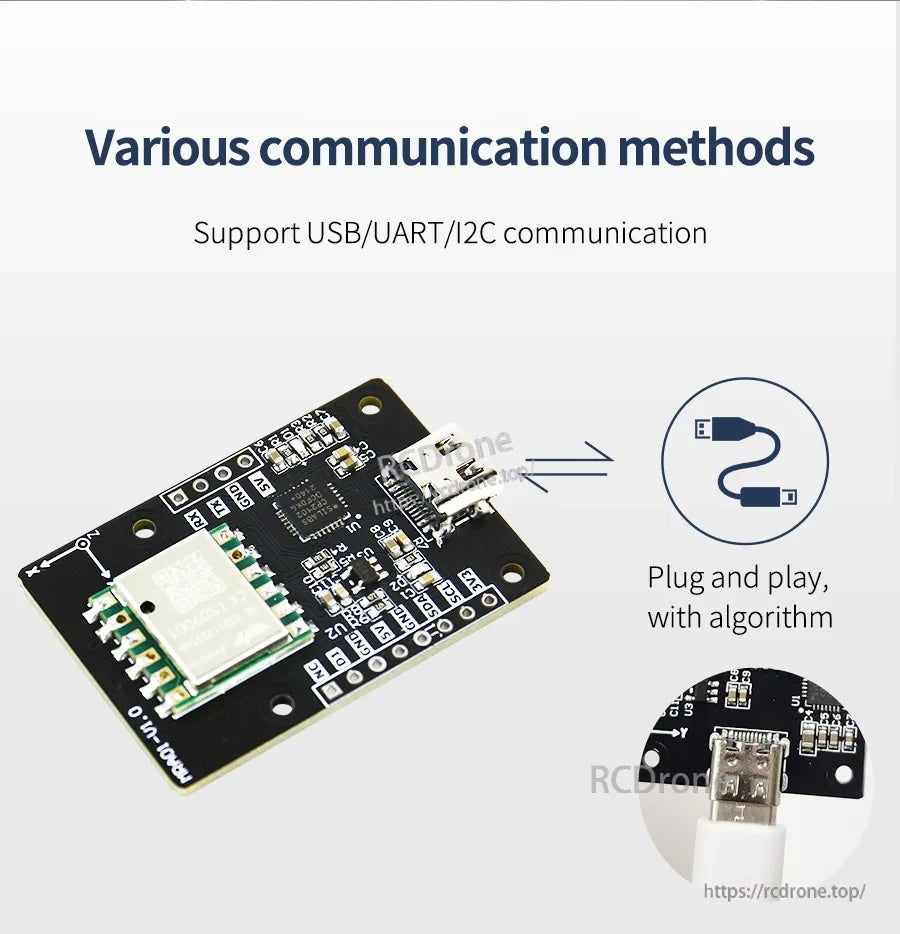
Yahboom CMP10A IMU मॉड्यूल USB, UART, और I2C कनेक्शनों का समर्थन करता है ताकि सामान्य कंट्रोलर्स और पीसी के साथ लचीले सेटअप की अनुमति मिल सके।
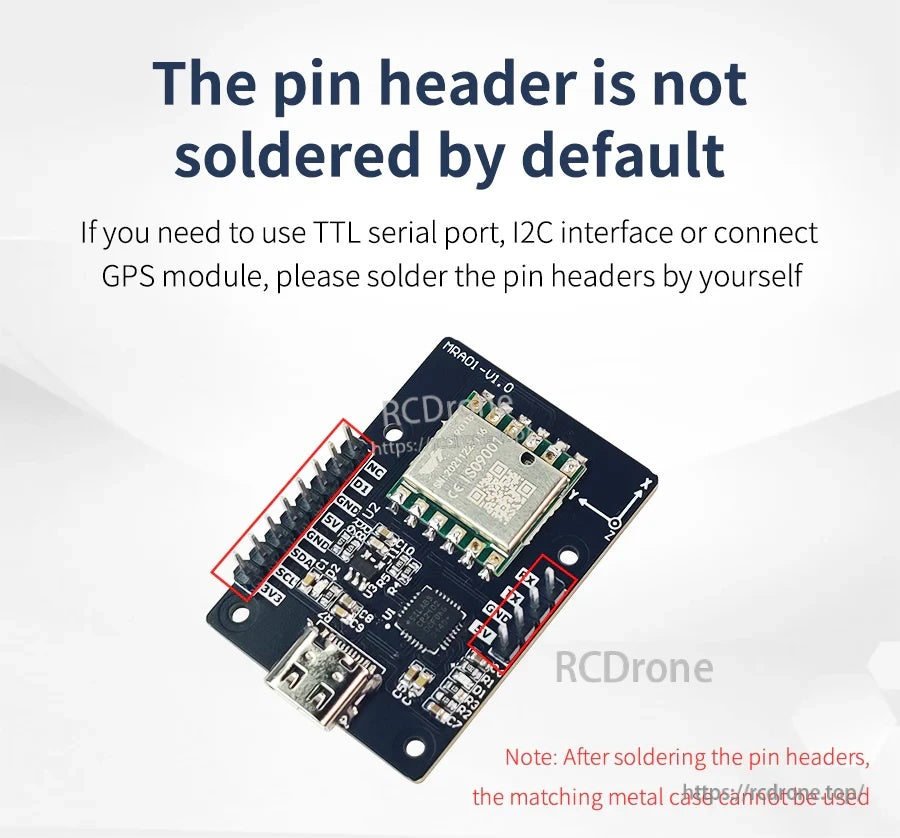
CMP10A IMU बोर्ड एक माइक्रो USB कनेक्टर का उपयोग करता है और TTL सीरियल, I2C, या GPS मॉड्यूल का उपयोग करने के लिए पिन हेडर को सोल्डर करने की आवश्यकता होती है।
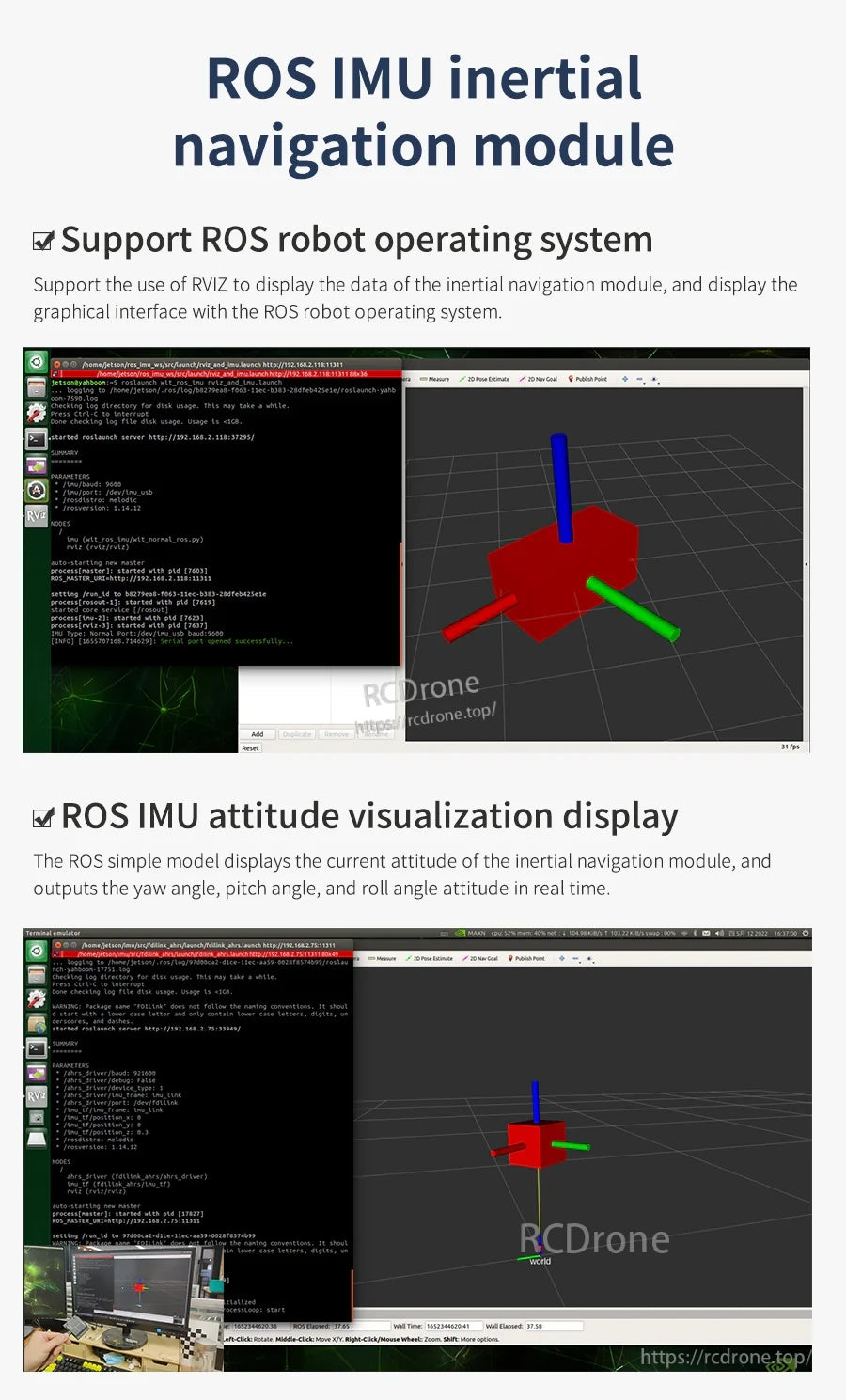
ROS समर्थन IMU अभिविन्यास डेटा को RViz में लाइव टर्मिनल आउटपुट के साथ सेटअप और डिबगिंग के लिए विज़ुअलाइज़ करने की अनुमति देता है।
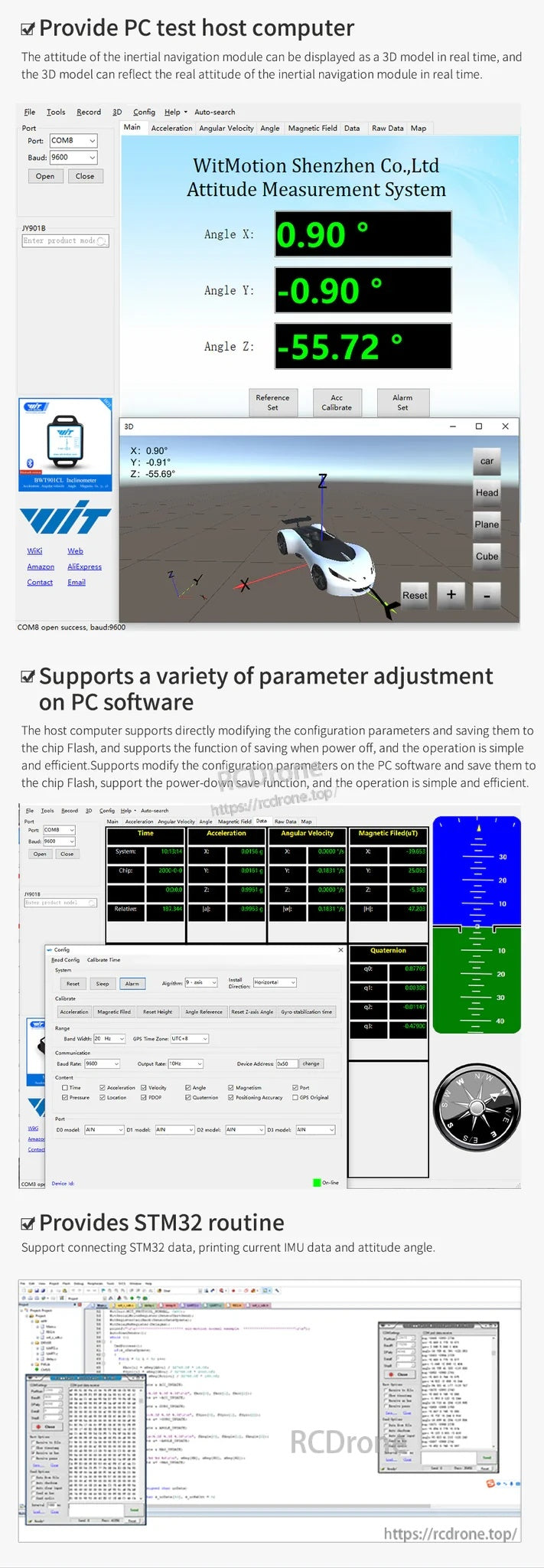
CMP10A IMU पीसी सॉफ़्टवेयर के लिए लाइव एटीट्यूड एंगल मॉनिटरिंग, पैरामीटर समायोजन, और STM32 रूटीन उदाहरणों का समर्थन करता है।
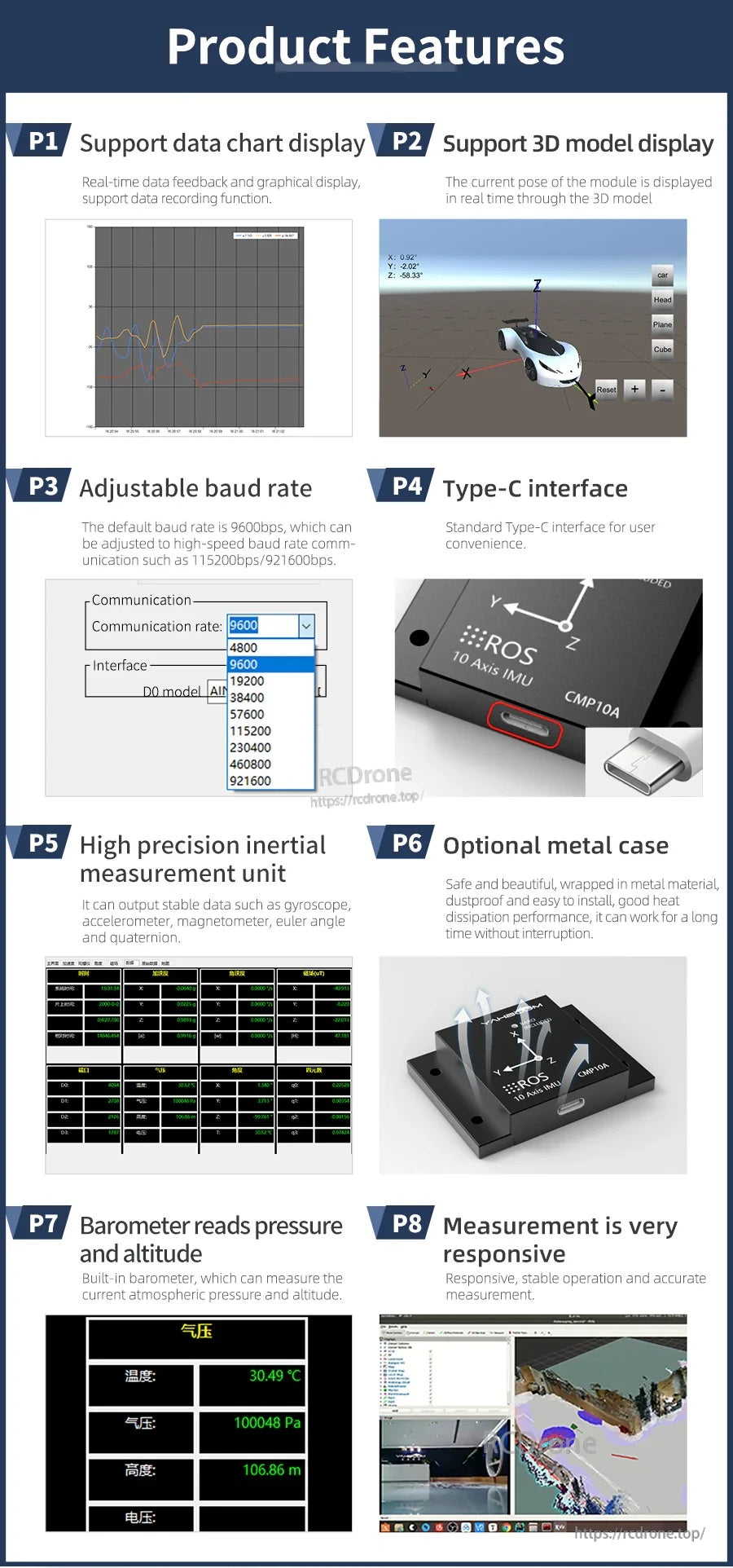
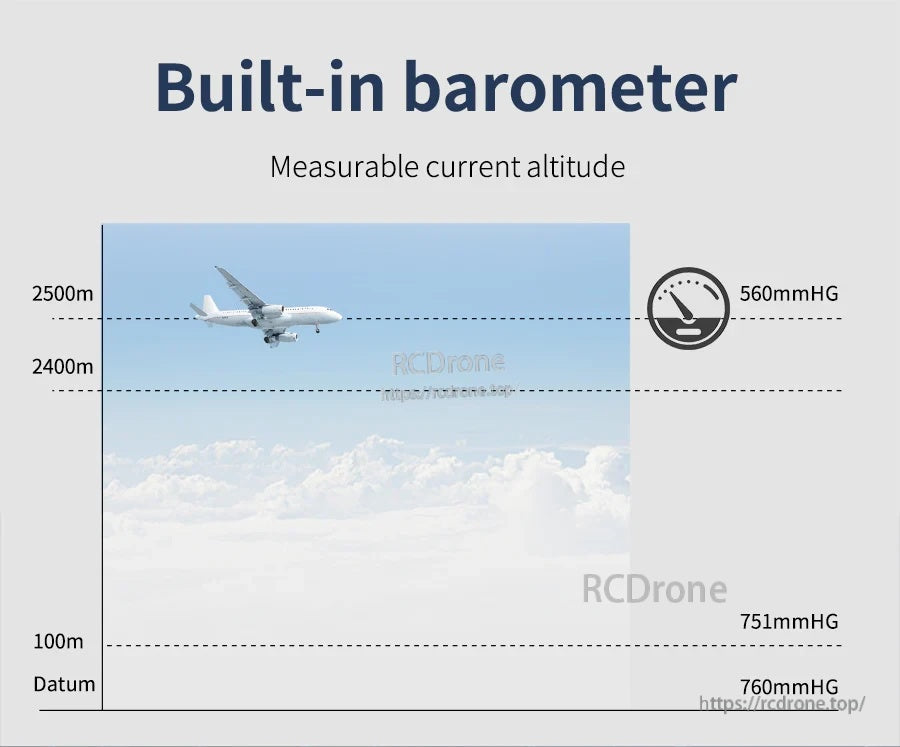
Yahboom CMP10A 10-एक्सिस IMU डेटा चार्ट और 3D मॉडल डिस्प्ले, समायोज्य बौड दर, एक टाइप-C इंटरफेस, और बैरोमीटर दबाव/ऊँचाई रीडिंग का समर्थन करता है।
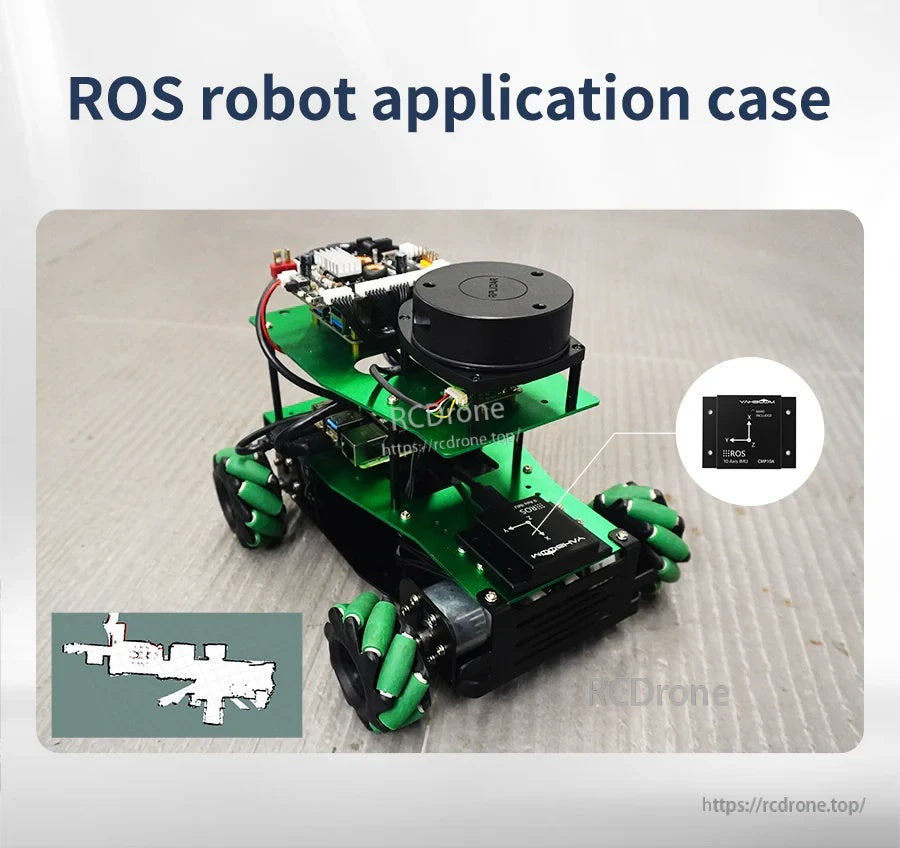
एक कॉम्पैक्ट ROS मोबाइल रोबोट प्लेटफ़ॉर्म जिसमें शीर्ष पर लिडार मॉड्यूल है, नेविगेशन और सेंसर एकीकरण के लिए एक व्यावहारिक संदर्भ सेटअप प्रदान करता है।
Yahboom CMP10A 10-एक्सिस IMU सेंसर Windows और Linux के लिए समर्थन करता है, जिससे यह Raspberry Pi, Jetson, और STM32-आधारित परियोजनाओं के साथ एकीकृत हो सकता है।

Yahboom CMP10A 10-एक्सिस IMU सेंसर ड्रोन, स्वचालित उद्योग, मोबाइल रोबोट, और स्व-ड्राइविंग कार परियोजनाओं में उपयोग के लिए प्रस्तुत किया गया है।

Yahboom CMP10A 10-एक्सिस IMU एक कॉम्पैक्ट मॉड्यूल में आता है जिसमें माउंटिंग होल और आसान कनेक्शन के लिए एक माइक्रो USB इंटरफेस बोर्ड होता है।
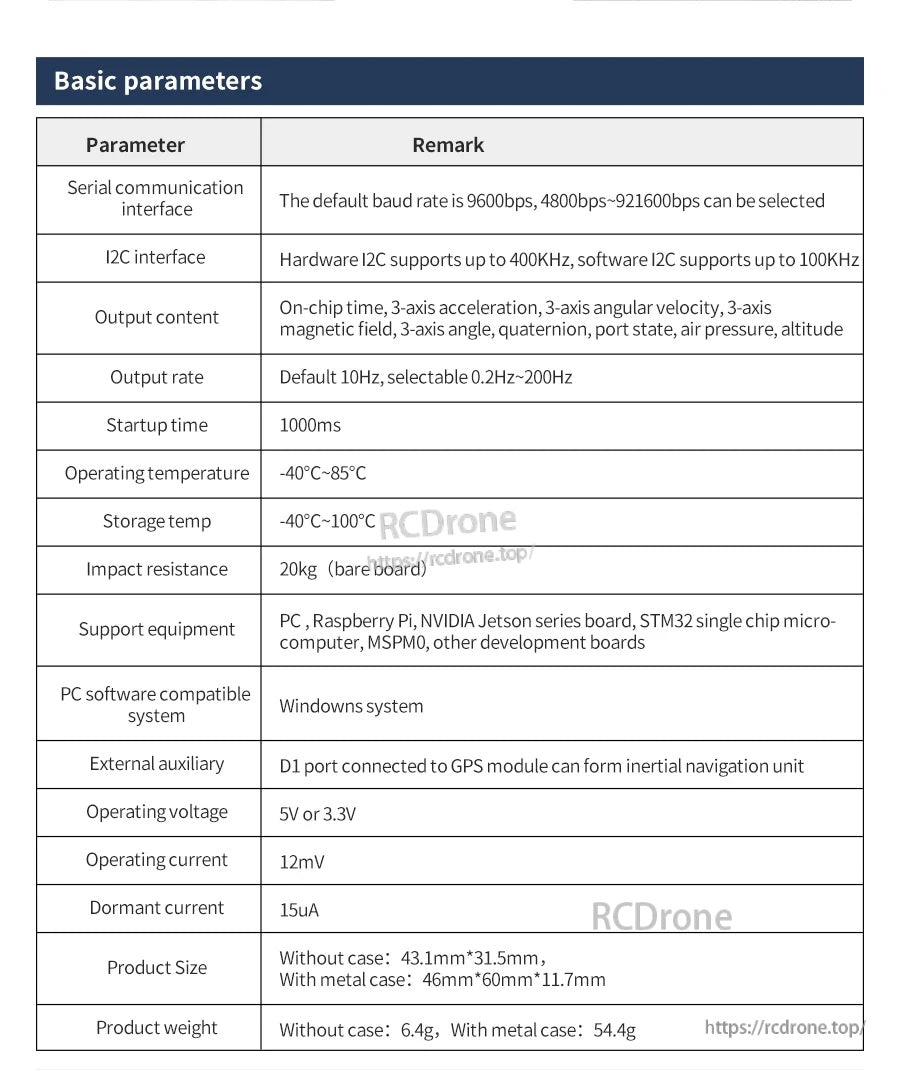
CMP10A IMU I2C को 400kHz तक समर्थन करता है, चयन योग्य 0.2–200Hz आउटपुट दर, और लचीले एकीकरण के लिए 5V या 3.3V संचालन।
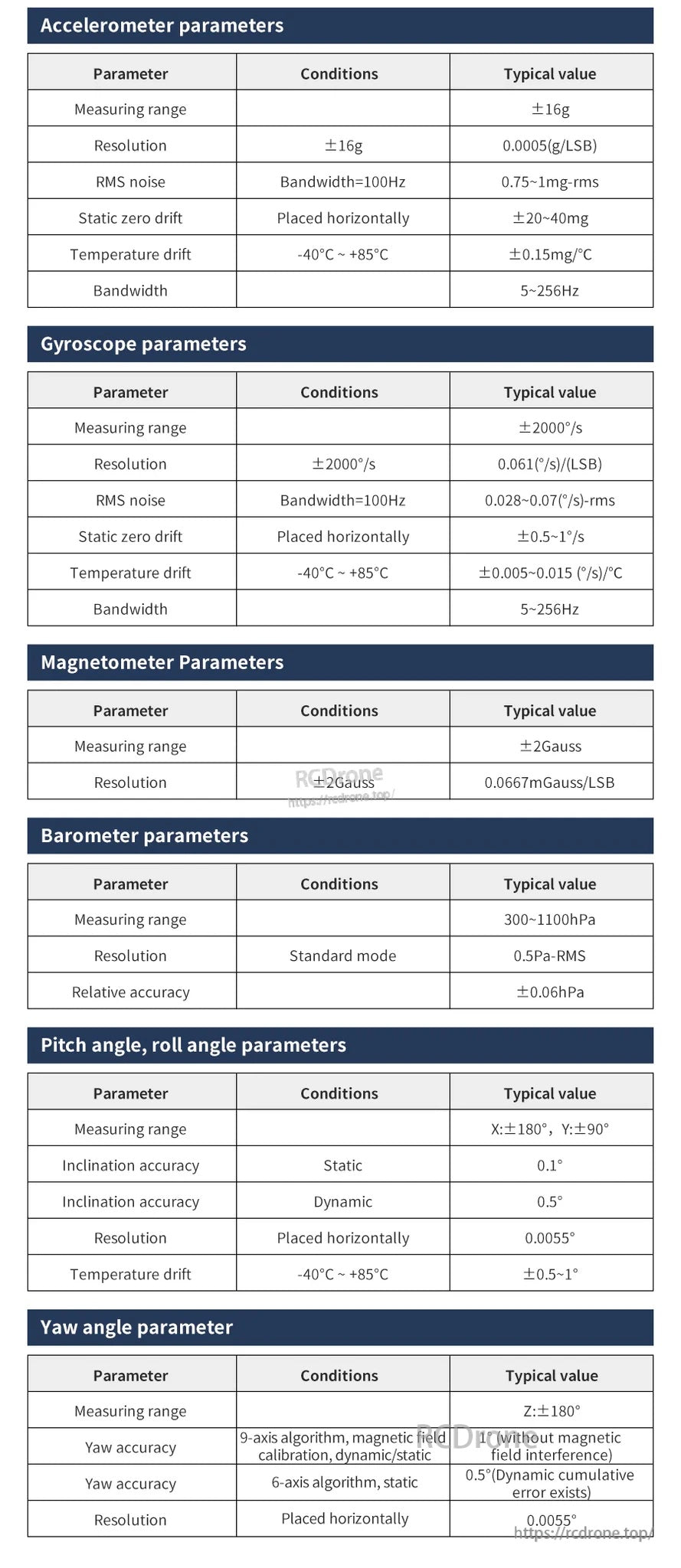
CMP10A 10-एक्सिस IMU में ±16 g एक्सेलेरोमीटर, ±2000°/s जिरोस्कोप, ±26 गॉस मैग्नेटोमीटर, और पिच/रोल/यॉ कोण आउटपुट के साथ 300–1100 hPa बैरोमीटर शामिल हैं।
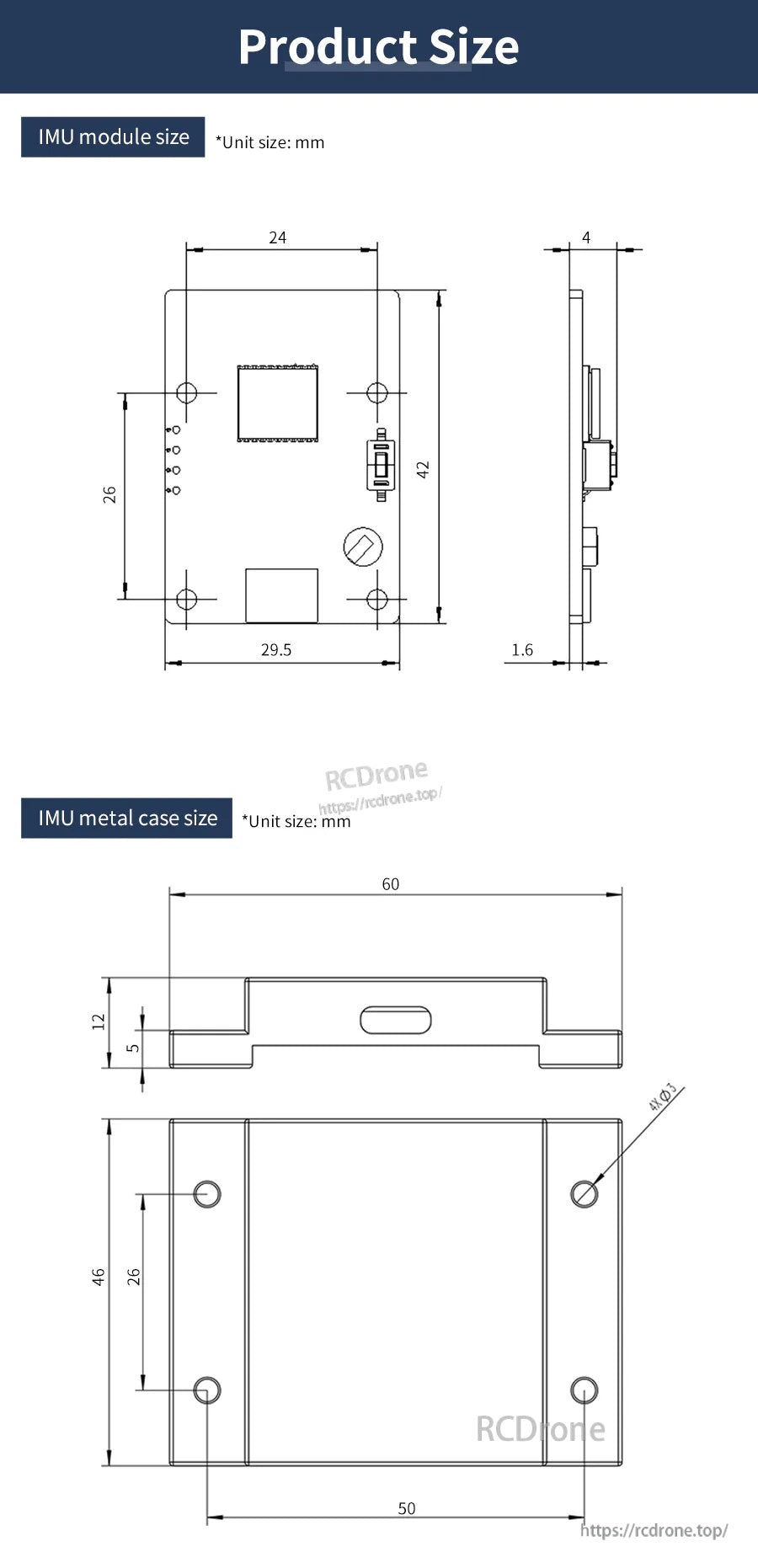
CMP10A IMU के आयामों में 29.5 मिमी वर्ग मॉड्यूल और आसान माउंटिंग योजना के लिए 60 × 50 मिमी धातु केस शामिल हैं।
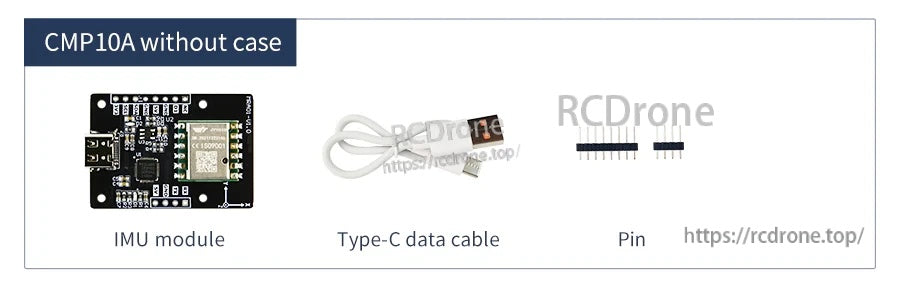
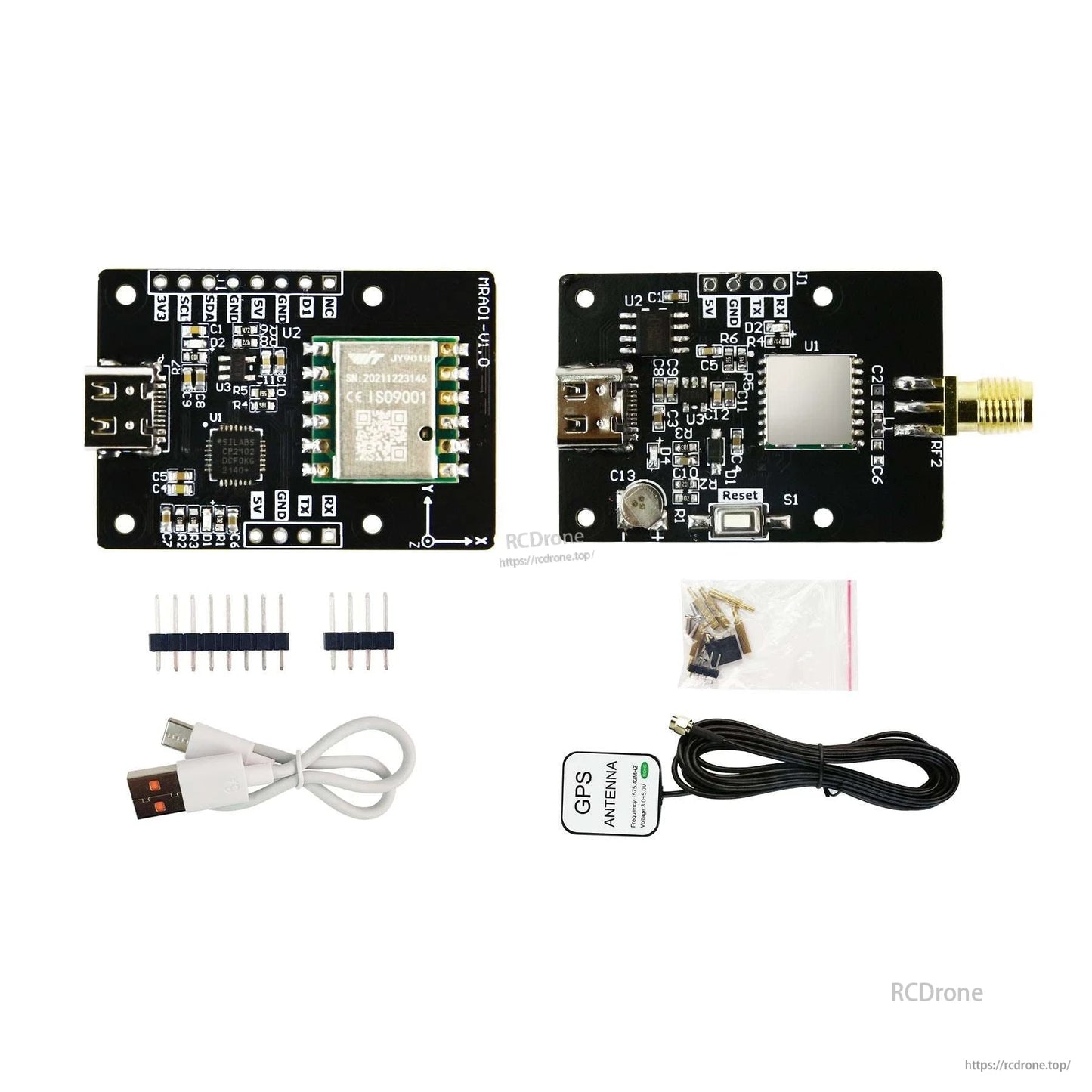
Yahboom CMP10A IMU मॉड्यूल एक USB‑C डेटा केबल और आसान प्रोटोटाइपिंग और वायरिंग के लिए पिन हेडर के साथ आता है।
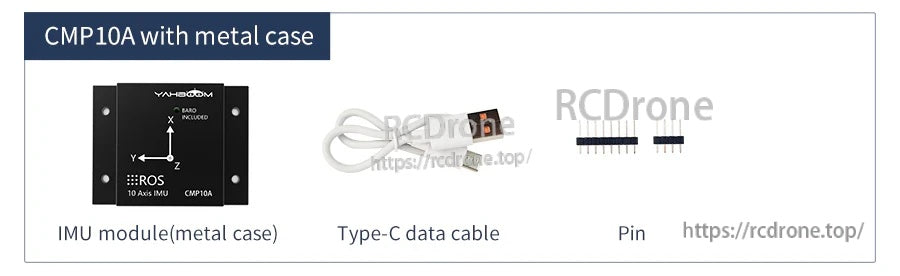
Yahboom CMP10A IMU किट में एक धातु-केस वाला सेंसर मॉड्यूल, USB-C डेटा केबल और वायरिंग के लिए पिन हेडर शामिल हैं।

CMP10A IMU मॉड्यूल एक YDLIDAR X3 Pro लिडार, सीरियल पोर्ट एडाप्टर बोर्ड, पिन हेडर, और इनडोर नेविगेशन सेटअप के लिए एक टाइप-C डेटा केबल के साथ बंडल किया गया है।
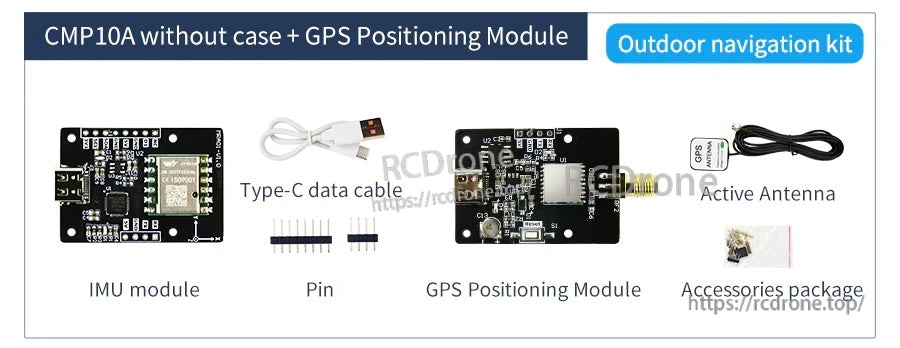
याहबूम CMP10A IMU सेंसर किट में एक IMU मॉड्यूल, GPS पोजिशनिंग मॉड्यूल, टाइप-C डेटा केबल, पिन और बाहरी नेविगेशन निर्माणों के लिए एक सक्रिय एंटीना शामिल है।
Related Collections