














Yahboom ROSMASTER A1 ROS2 रोबोट कार, एकरमैन स्टीयरिंग चेसिस, TOF LiDAR, PTZ कैमरा, वॉयस एआई के साथ
Yahboom ROSMASTER A1 ROS2 रोबोट कार, एकरमैन स्टीयरिंग चेसिस, TOF LiDAR, PTZ कैमरा, वॉयस एआई के साथ
Yahboom
पिकअप उपलब्धता लोड नहीं की जा सकी
अवलोकन
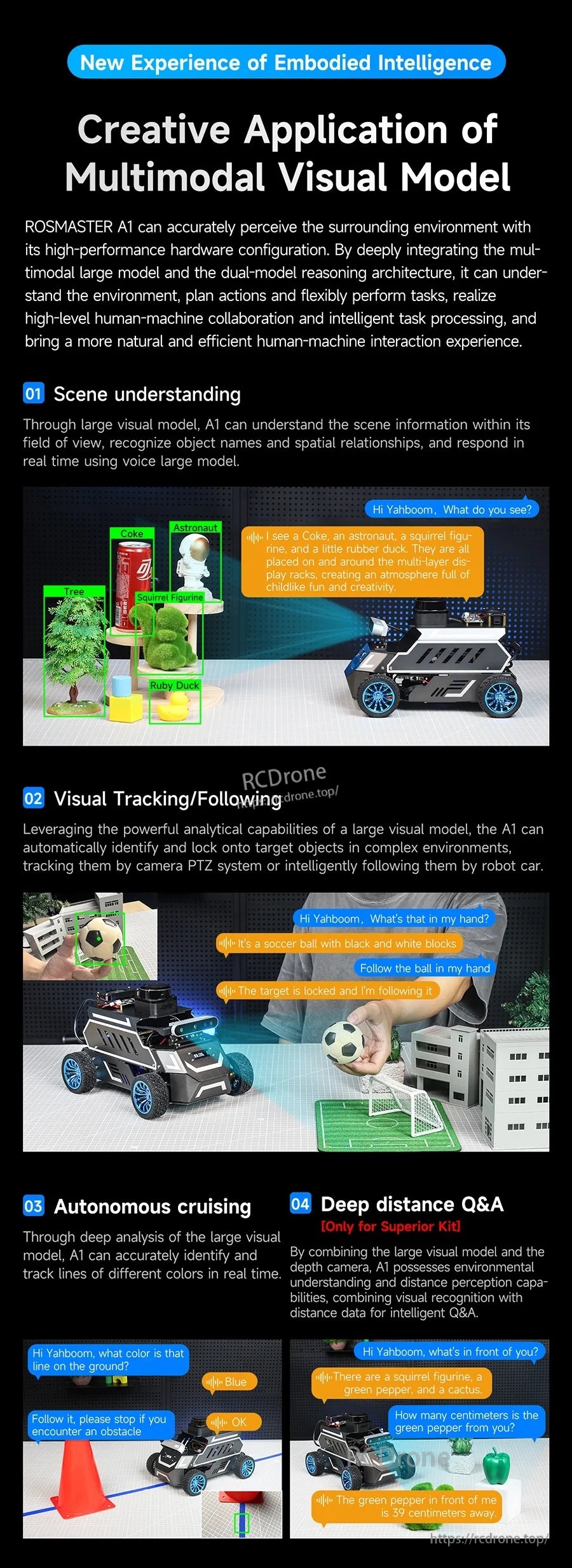
ROSMASTER A1 एक ROS2 रोबोट कार प्लेटफॉर्म (ROS2 HUMBLE) है जो ROS शिक्षा और कृत्रिम बुद्धिमत्ता अनुसंधान के लिए विकसित किया गया है। यह वास्तविक वाहन स्टीयरिंग विशेषताओं को दोहराने के लिए एक एकरमैन गति/स्टीयरिंग चेसिस को अपनाता है, और SLAM मैपिंग और नेविगेशन, पर्यावरण समझ, और मल्टीमॉडल (वॉयस/विजन/टेक्स्ट) इंटरैक्शन के लिए AI बड़े मॉडल वॉयस इंटरैक्शन प्लस विजुअल परसेप्शन को एकीकृत करता है।
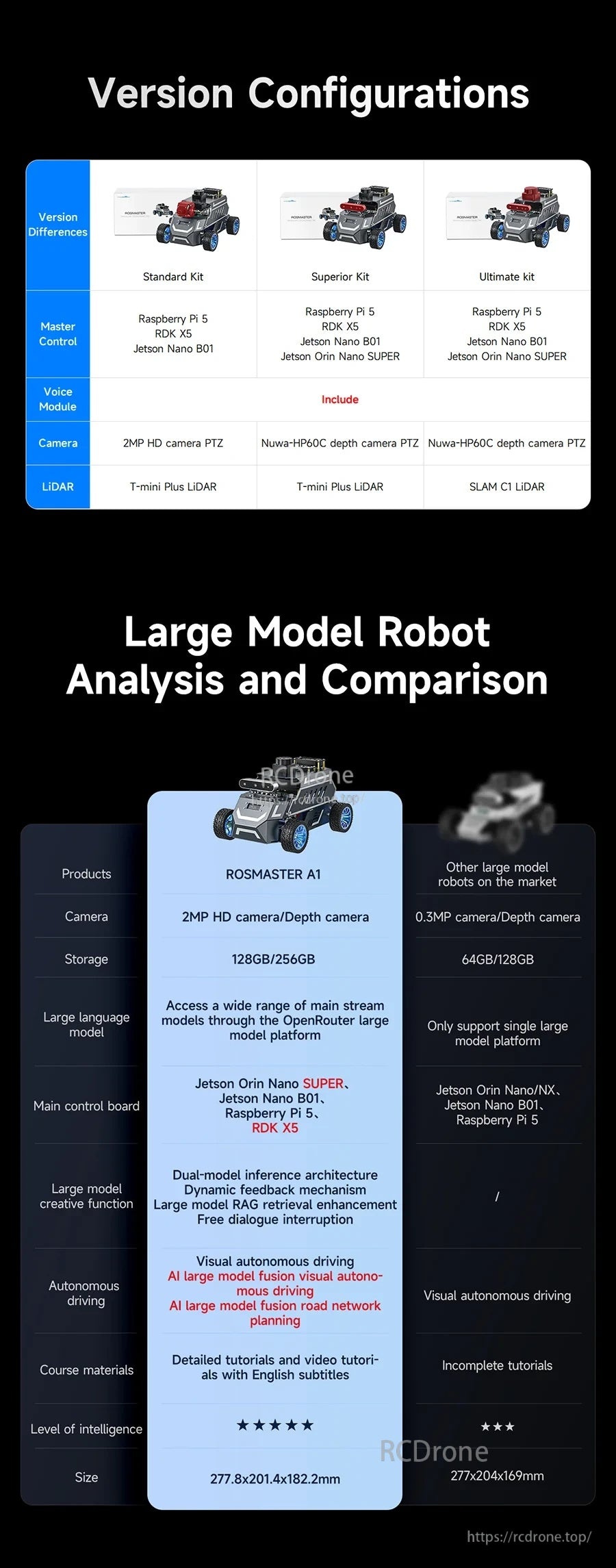
यह कई मास्टर नियंत्रण विकल्पों का समर्थन करता है जिसमें रास्पबेरी पाई 5 (8GB), RDK X5 (8GB), जेटसन नैनो B01 (4GB), और जेटसन ओरिन नैनो सुपर (8GB) शामिल हैं। विशिष्ट हार्डवेयर विकल्पों में AI बड़ा मॉडल वॉयस मॉड्यूल, 2MP HD कैमरा PTZ (मानक किट), 3D डेप्थ कैमरा PTZ (उत्तम/अल्टीमेट किट्स), और TOF LiDAR (संस्करण के अनुसार T-mini प्लस LiDAR या SLAM C1 LiDAR शामिल हैं) शामिल हैं।
मुख्य विशेषताएँ
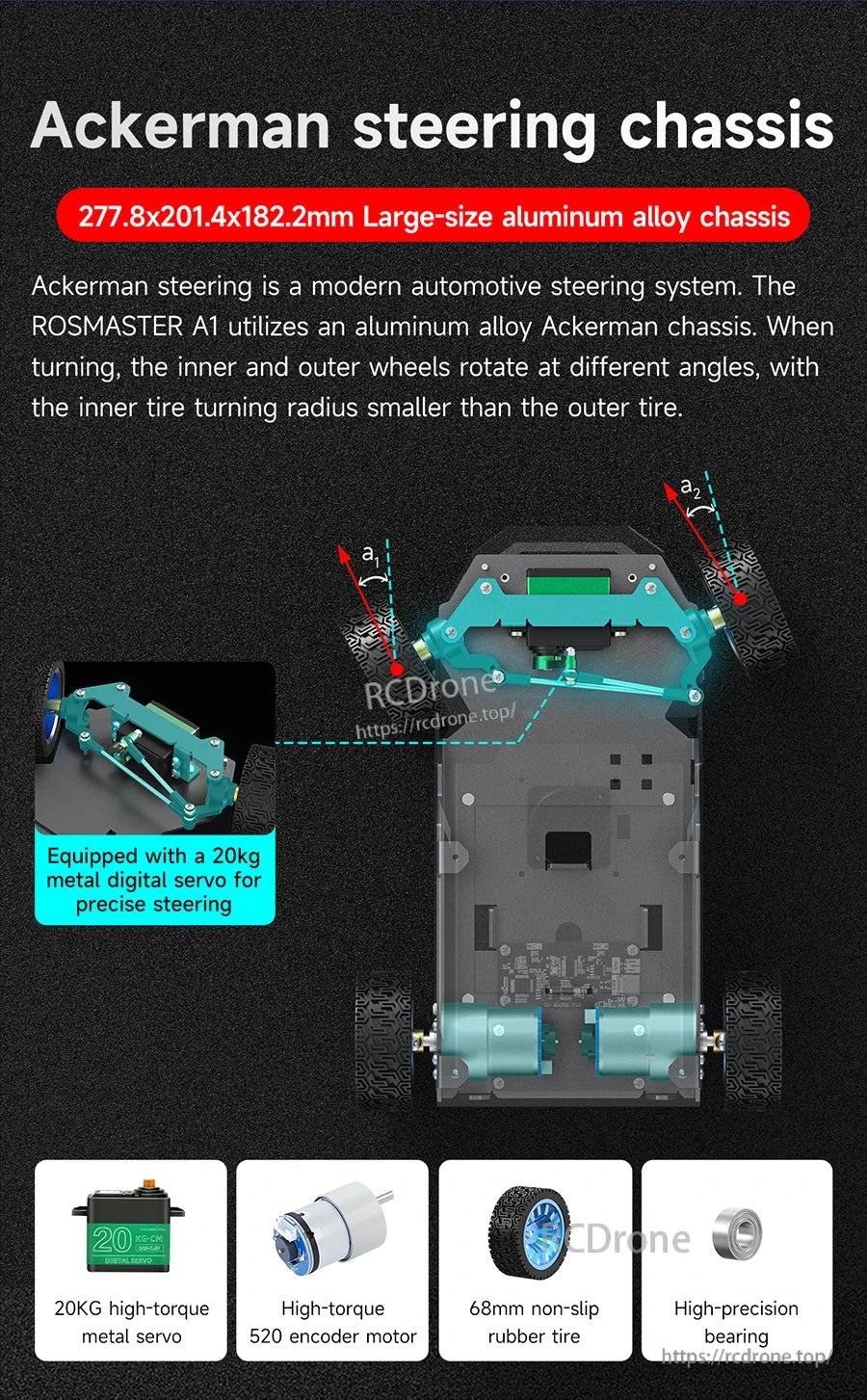
- वाहन जैसी गति के लिए एकरमैन स्टीयरिंग चेसिस: एल्यूमिनियम मिश्र धातु एकरमैन चेसिस; अलग-अलग अंदरूनी/बाहरी पहिया कोणों के साथ मोड़ने की ज्यामिति।
- सटीक नियंत्रण के लिए चेसिस हार्डवेयर: सटीक स्टीयरिंग के लिए 20 किलोग्राम धातु डिजिटल सर्वो से सुसज्जित; उच्च-टॉर्क 520 एन्कोडर मोटर; 68 मिमी गैर-स्लिप रबर टायर; उच्च-सटीकता बियरिंग।
- मल्टीमॉडल बड़े मॉडल क्षमताएँ: स्केलेबल RAG ज्ञान आधार; दृश्य बड़े भाषा मॉडल; पाठ बड़े पैमाने पर भाषा मॉडल; द्विमॉडल तर्क आर्किटेक्चर; गतिशील प्रतिक्रिया तर्क।
-
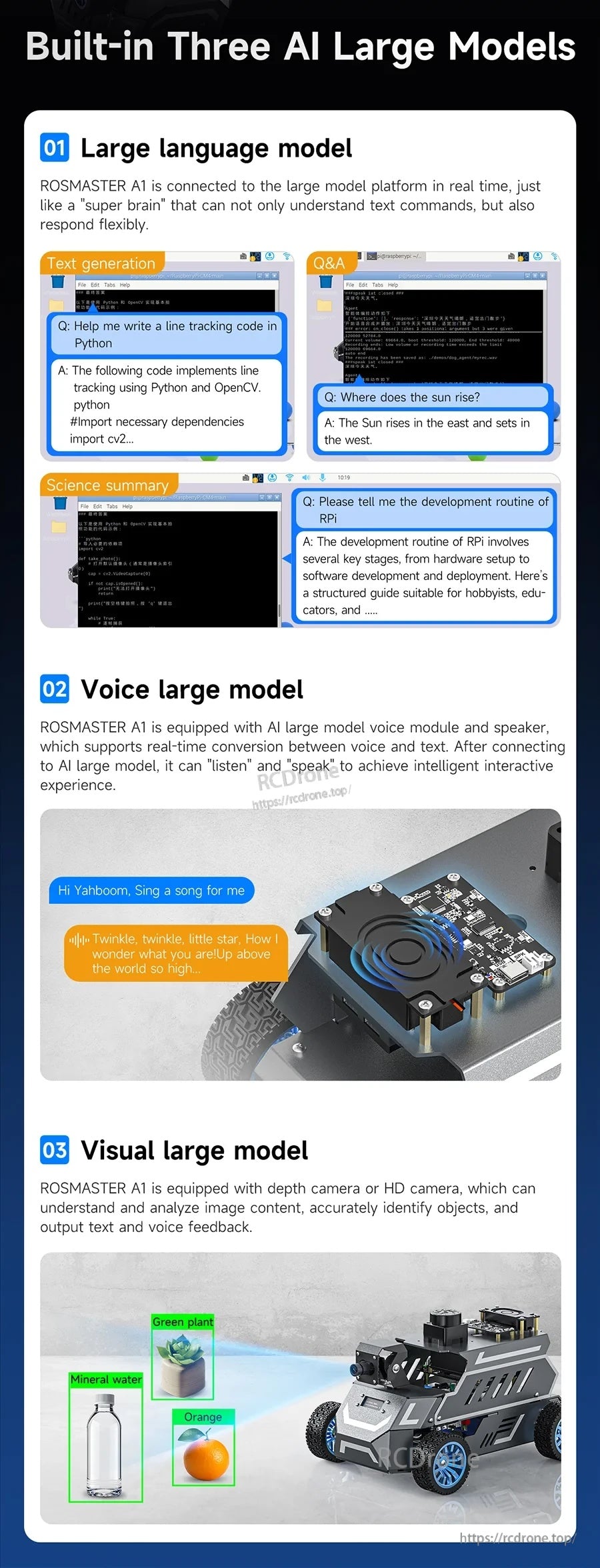
तीन अंतर्निहित AI बड़े मॉडल (जैसा वर्णित है):
- बड़ा भाषा मॉडल: पाठ कमांड समझने और लचीले उत्तरों के लिए बड़े मॉडल प्लेटफॉर्म से रीयल-टाइम कनेक्शन।
- वॉयस बड़ा मॉडल: AI बड़ा मॉडल वॉयस मॉड्यूल और स्पीकर जो आवाज और पाठ के बीच रीयल-टाइम रूपांतरण का समर्थन करते हैं (“सुनें” और “बोलें”)।
- दृश्य बड़ा मॉडल: छवि समझ, वस्तु पहचान, और पाठ/आवाज प्रतिक्रिया आउटपुट के लिए गहराई कैमरा या एचडी कैमरा।
- 3D गहराई दृष्टि (वैकल्पिक): गहराई दूरी; आयतन मापन; 3D बिंदु बादल पहचान; 3D वास्तविक दुनिया मानचित्रण; गहरी किनारा पहचान।
- TOF LiDAR कार्य: सड़क नेटवर्क योजना; मानचित्रण नेविगेशन; पथ योजना; गतिशील बाधा परिहार; बहु-बिंदु नेविगेशन; 360° सर्वदिशात्मक धारणा।
- ROS2 विकास पारिस्थितिकी तंत्र: Gazebo और RViz के साथ संगत; SLAM मानचित्रण और नेविगेशन, बाधा परिहार, ट्रैकिंग, और दृश्य पहचान कार्यों का समर्थन करता है।
- AI दृष्टि सॉफ़्टवेयर स्टैक (जैसा सूचीबद्ध है): Mediapipe, OpenCV, YOLOv11।
विशेषताएँ
| उत्पाद | ROSMASTER A1 |
| प्लेटफार्म | AI लार्ज मॉडल एकरमैन कार / ROS2 रोबोट कार प्लेटफार्म |
| चेसिस आकार | 277.8 x 201.4 x 182.2 mm |
| चेसिस सामग्री | एल्यूमिनियम मिश्र धातु (संपूर्ण एल्यूमिनियम मिश्र धातु शरीर / बड़े आकार का एल्यूमिनियम मिश्र धातु चेसिस) |
| स्टीयरिंग | एकरमैन स्टीयरिंग चेसिस; 20kg धातु डिजिटल सर्वो (20KG उच्च-टॉर्क धातु सर्वो) |
| ड्राइव मोटर | उच्च-टॉर्क 520 एन्कोडर मोटर |
| टायर | 68mm गैर-पर्ची रबर टायर |
| बियरिंग्स | उच्च-सटीकता बियरिंग |
| बैटरी पैक | 6000mAh बैटरी पैक |
| रोबोट नियंत्रण | ROS रोबोट नियंत्रण बोर्ड / ROS रोबोट विस्तार बोर्ड (शब्दांकन दिखाया गया: ROS रोबोट नियंत्रण बोर्ड; बहु-कार्यात्मक ROS रोबोट विस्तार बोर्ड) |
| सॉफ़्टवेयर वातावरण | ROS2 HUMBLE |
| सिमुलेशन/विज़ुअलाइज़ेशन | गज़ेबो, आरविज़ |
संस्करण कॉन्फ़िगरेशन (अंतर)
| आइटम | स्टैंडर्ड किट | सुपीरियर किट | अल्टीमेट किट |
|---|---|---|---|
| मास्टर कंट्रोल | रास्पबेरी पाई 5; आरडीके एक्स5; जेटसन नैनो बी01 | रास्पबेरी पाई 5; आरडीके एक्स5; जेटसन नैनो बी01; जेटसन ओरिन नैनो सुपर | रास्पबेरी पाई 5; आरडीके एक्स5; जेटसन नैनो बी01; जेटसन ओरिन नैनो सुपर |
| वॉइस मॉड्यूल | शामिल | ||
| कैमरा | 2MP एचडी कैमरा पीटीजेड | नुवा-एचपी60सी डेप्थ कैमरा पीटीजेड | नुवा-एचपी60सी डेप्थ कैमरा पीटीजेड |
| लिडार | टी-मिनी प्लस लिडार | टी-मिनी प्लस लिडार | एसएलएएम सी1 लिडार |
ROS रोबोट कॉन्फ़िगरेशन चयन सुझाव (जैसा सूचीबद्ध है)
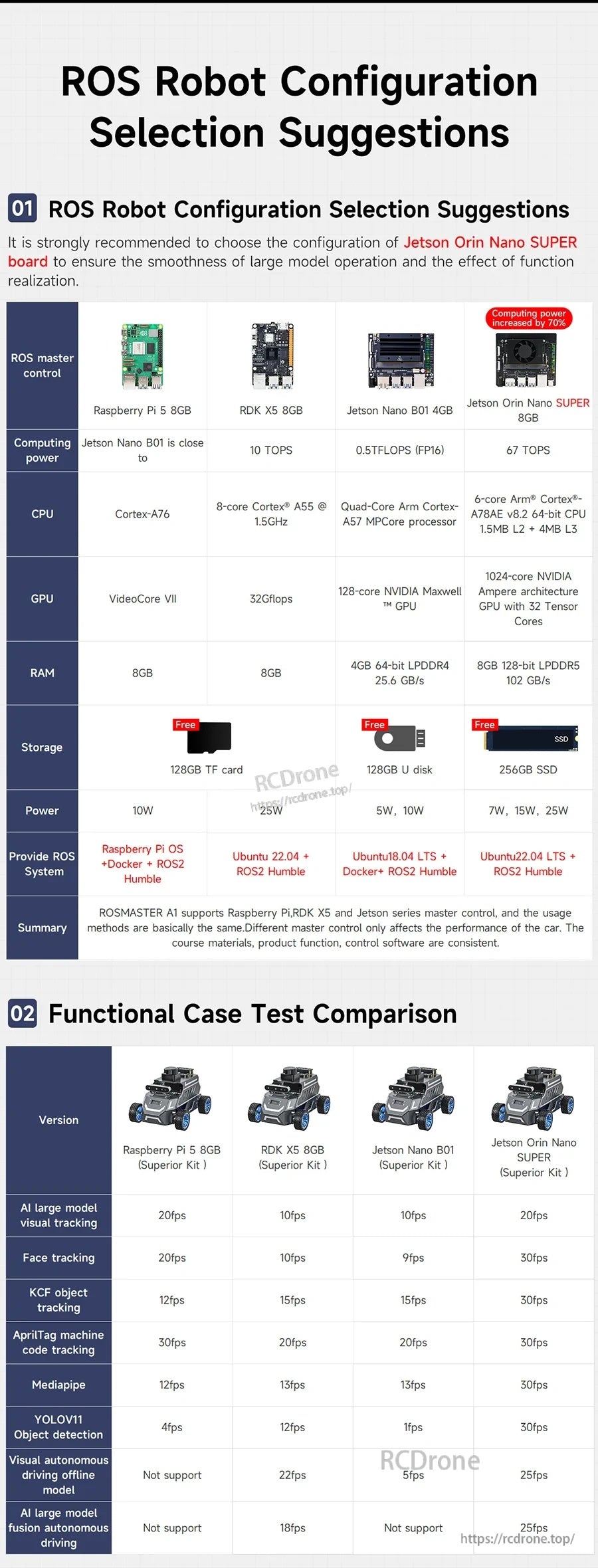
यह दृढ़ता से अनुशंसा की जाती है कि Jetson Orin Nano SUPER बोर्ड के कॉन्फ़िगरेशन का चयन करें ताकि बड़े मॉडल के संचालन की सुगमता और कार्य के प्रभाव को सुनिश्चित किया जा सके।(Label shown: “कंप्यूटिंग पावर में 70% की वृद्धि”.)
| ROS मास्टर कंट्रोल | रास्पबेरी पाई 5 8GB | RDK X5 8GB | जेटसन नैनो B01 4GB | जेटसन ओरिन नैनो सुपर 8GB |
|---|---|---|---|---|
| कंप्यूटिंग पावर | जेटसन नैनो B01 करीब है | 10 TOPS | 0.5TFLOPS (FP16) | 67 TOPS |
| CPU | कोर्टेक्स-A76 | 8-कोर कोर्टेक्स-A55 @ 1.5GHz | क्वाड-कोर आर्म कोर्टेक्स-A57 MPCore प्रोसेसर | 6-कोर आर्म कोर्टेक्स-A78AE v8.2 64-बिट CPU; 1.5MB L2 + 4MB L3 |
| GPU | VideoCore VII | 32Gflops | 128-core NVIDIA Maxwell GPU | 1024-core NVIDIA Ampere architecture GPU with 32 Tensor Cores |
| RAM | 8GB | 8GB | 4GB 64-bit LPDDR4; 25.6 GB/s | 8GB 128-bit LPDDR5; 102 GB/s |
| स्टोरेज | 128GB TF कार्ड (मुफ्त) | 128GB U डिस्क (मुफ्त) | 256GB SSD (मुफ्त) | |
| पावर | 10W | 25W | 5W, 10W | 7W, 15W, 25W |
| ROS सिस्टम प्रदान करें | Raspberry Pi OS + Docker + ROS2 Humble | Ubuntu 22.04 + ROS2 Humble | Ubuntu18.04 LTS + Docker+ ROS2 Humble | Ubuntu22.04 LTS + ROS2 Humble |
सारांश पाठ दिखाया गया: ROSMASTER A1 रास्पबेरी पाई, RDK X5 और जेटसन सीरीज मास्टर कंट्रोल का समर्थन करता है, और उपयोग के तरीके मूल रूप से समान हैं। विभिन्न मास्टर कंट्रोल केवल कार के प्रदर्शन को प्रभावित करता है। पाठ्यक्रम सामग्री, उत्पाद कार्य, नियंत्रण सॉफ़्टवेयर संगत हैं।
कार्यात्मक केस परीक्षण तुलना (उत्तम किट)
| कार्य | रास्पबेरी पाई 5 8GB | RDK X5 8GB | जेटसन नैनो B01 | जेटसन ओरिन नैनो सुपर |
|---|---|---|---|---|
| एआई बड़ा मॉडल दृश्य ट्रैकिंग | 20fps | 10fps | 10fps | 20fps |
| चेहरा ट्रैकिंग | 20fps | 10fps | 9fps | 30fps |
| KCF वस्तु ट्रैकिंग | 12fps | 15fps | 15fps | 30fps |
| एप्रिलटैग मशीन कोड ट्रैकिंग | 30fps | 20fps | 20fps | 30fps |
| मीडियापाइप | 12fps | 13fps | 13fps | 30fps |
| YOLOV11 वस्तु पहचान | 4fps | 12fps | 1fps | 30fps |
| विजुअल स्वायत्त ड्राइविंग ऑफलाइन मॉडल | समर्थन नहीं | 22fps | 5fps | 25fps |
| एआई बड़ा मॉडल फ्यूजन स्वायत्त ड्राइविंग | समर्थन नहीं | 18fps | समर्थन नहीं | 25fps |
ROS फंक्शन्स (हाइलाइट्स)
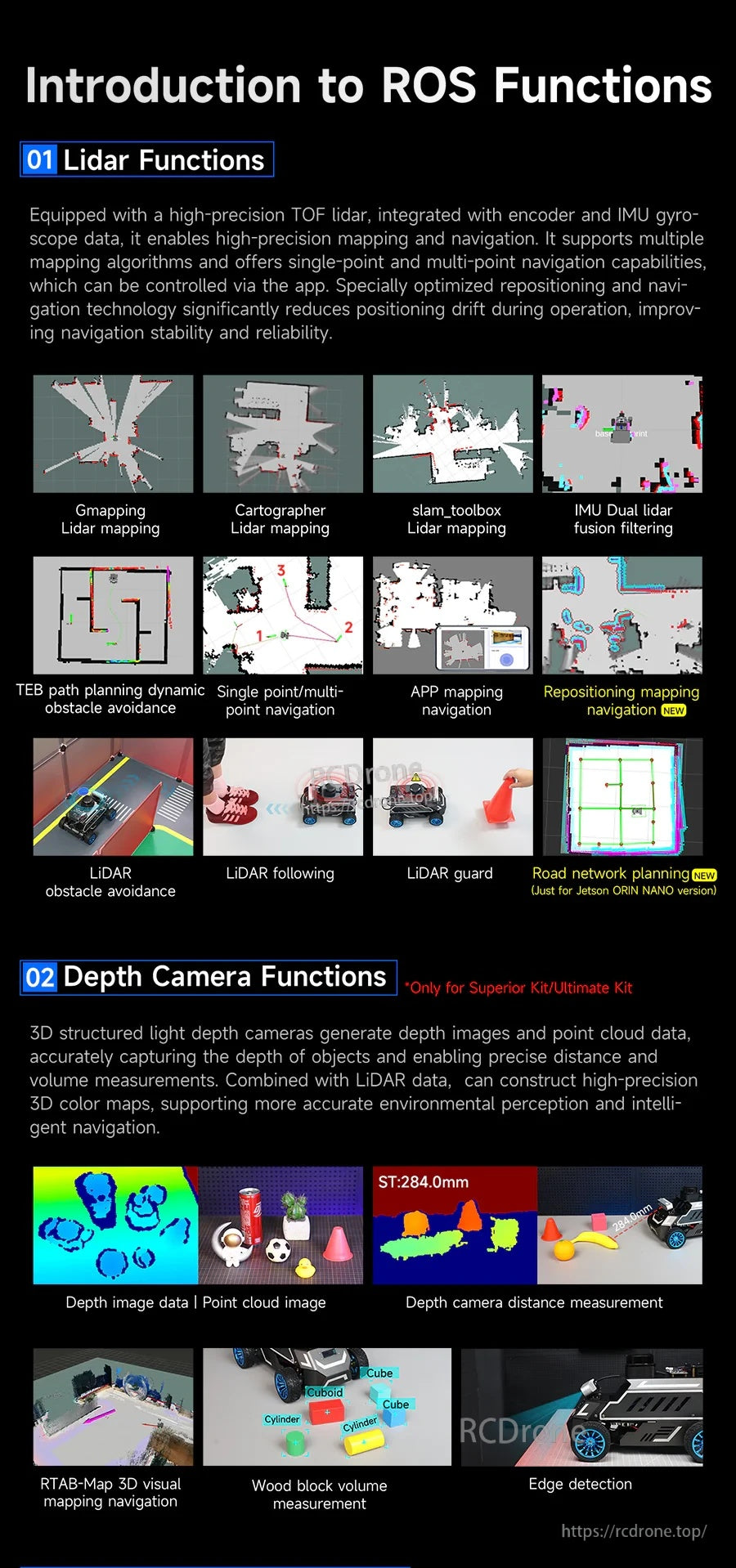
- LiDAR फंक्शन्स: उच्च-सटीकता TOF LiDAR एन्कोडर और IMU जाइरोस्कोप डेटा के साथ एकीकृत मैपिंग और नेविगेशन के लिए; कई मैपिंग एल्गोरिदम और सिंगल-पॉइंट/मल्टी-पॉइंट नेविगेशन का समर्थन करता है; ऐप के माध्यम से नियंत्रित किया जा सकता है; पोजिशनिंग ड्रिफ्ट को कम करने और स्थिरता और विश्वसनीयता में सुधार के लिए अनुकूलित पुनर्स्थापन और नेविगेशन।
- समर्थित मैपिंग/नेविगेशन घटक (जैसा दिखाया गया है): Gmapping LiDAR मैपिंग; Cartographer LiDAR मैपिंग; slam_toolbox LiDAR मैपिंग; IMU डुअल LiDAR फ्यूजन फ़िल्टरिंग; TEB पथ योजना गतिशील बाधा परिहार; APP मैपिंग नेविगेशन; पुनर्स्थापन मैपिंग नेविगेशन।
- सड़क नेटवर्क योजना: नया के रूप में लेबल किया गया और "केवल Jetson ORIN NANO संस्करण के लिए" के रूप में दिखाया गया।
- गहराई कैमरा कार्य (केवल सुपीरियर किट/अल्टीमेट किट के लिए): 3D संरचित प्रकाश गहराई कैमरा गहराई छवियाँ और बिंदु बादल डेटा आउटपुट करता है; दूरी और मात्रा माप का समर्थन करता है; बेहतर धारणा और नेविगेशन के लिए LiDAR के साथ संयोजित किया जा सकता है। दिखाए गए उदाहरणों में RTAB-Map 3D दृश्य मैपिंग नेविगेशन, लकड़ी के ब्लॉक की मात्रा माप, और किनारे का पता लगाना शामिल है।
कार्य नोट्स / सीमाएँ (जैसा कि कहा गया है)
- स्वायत्त ड्राइविंग: Raspberry Pi संस्करण इस कार्य को समर्थन नहीं करता।
- सड़क नेटवर्क योजना: Raspberry Pi और Jetson NANO 4GB संस्करण इस कार्य को समर्थन नहीं करते।
- SLAM ट्रैक मैप नेविगेशन / ट्रैक मैप अनुप्रयोग: नोट के साथ दिखाया गया “ट्रैक मैप को स्वयं खरीदने की आवश्यकता है”; ट्रैक मैप शामिल नहीं है।
- डीप डिस्टेंस Q&A: “केवल सुपीरियर किट के लिए” के रूप में चिह्नित।
अनुप्रयोग
- ROS2 शिक्षण, कक्षा प्रयोगशालाएँ, और रोबोटिक्स पाठ्यक्रम परियोजनाएँ
- SLAM मैपिंग और नेविगेशन प्रयोग (Gazebo/RViz वर्कफ़्लो)
- स्वायत्त वाहन एल्गोरिदम सत्यापन एक एकरमैन स्टीयरिंग चेसिस पर (पथ योजना, प्रक्षेपवक्र ट्रैकिंग, स्टीयरिंग नियंत्रण)
- मशीन दृष्टि परियोजनाएँ: वस्तु पहचान और ट्रैकिंग, दृश्य पहचान, और दृश्य/आवाज इंटरैक्शन
- मल्टी-पॉइंट नेविगेशन और सड़क-नेटवर्क शैली मार्ग प्रबंधन (विशिष्ट मास्टर नियंत्रण कॉन्फ़िगरेशन पर समर्थित जैसा कि उल्लेख किया गया है)
पूर्व-बिक्री कॉन्फ़िगरेशन मार्गदर्शन (स्टैंडर्ड/सुपीरियर/अल्टीमेट किट चयन) या ROS2 HUMBLE के साथ एकीकरण सहायता के लिए, संपर्क करें [email protected] or visit https://rcdrone.top/.
मैनुअल
वीडियो
विवरण
ROSMASTER A1 एक ROS2 हम्बल एकरमैन रोबोट कार प्लेटफॉर्म है जो SLAM, नेविगेशन, और एम्बॉडीड AI अनुसंधान के लिए बनाया गया है।
मल्टीमॉडल इंटरैक्शन आवाज़ के आदेशों को दृश्य धारणा के साथ जोड़ता है ताकि बिना हाथों के नेविगेशन कार्य किए जा सकें।

विस्तार योग्य हार्डवेयर विकल्प गहराई दृष्टि और TOF LiDAR को जोड़ते हैं ताकि मैपिंग, बाधा से बचाव, और धारणा का समर्थन किया जा सके।
अपने ROS2 कार्यभार के लिए आवश्यक कंप्यूट प्लेटफॉर्म और सेंसर के आधार पर एक किट कॉन्फ़िगरेशन चुनें।
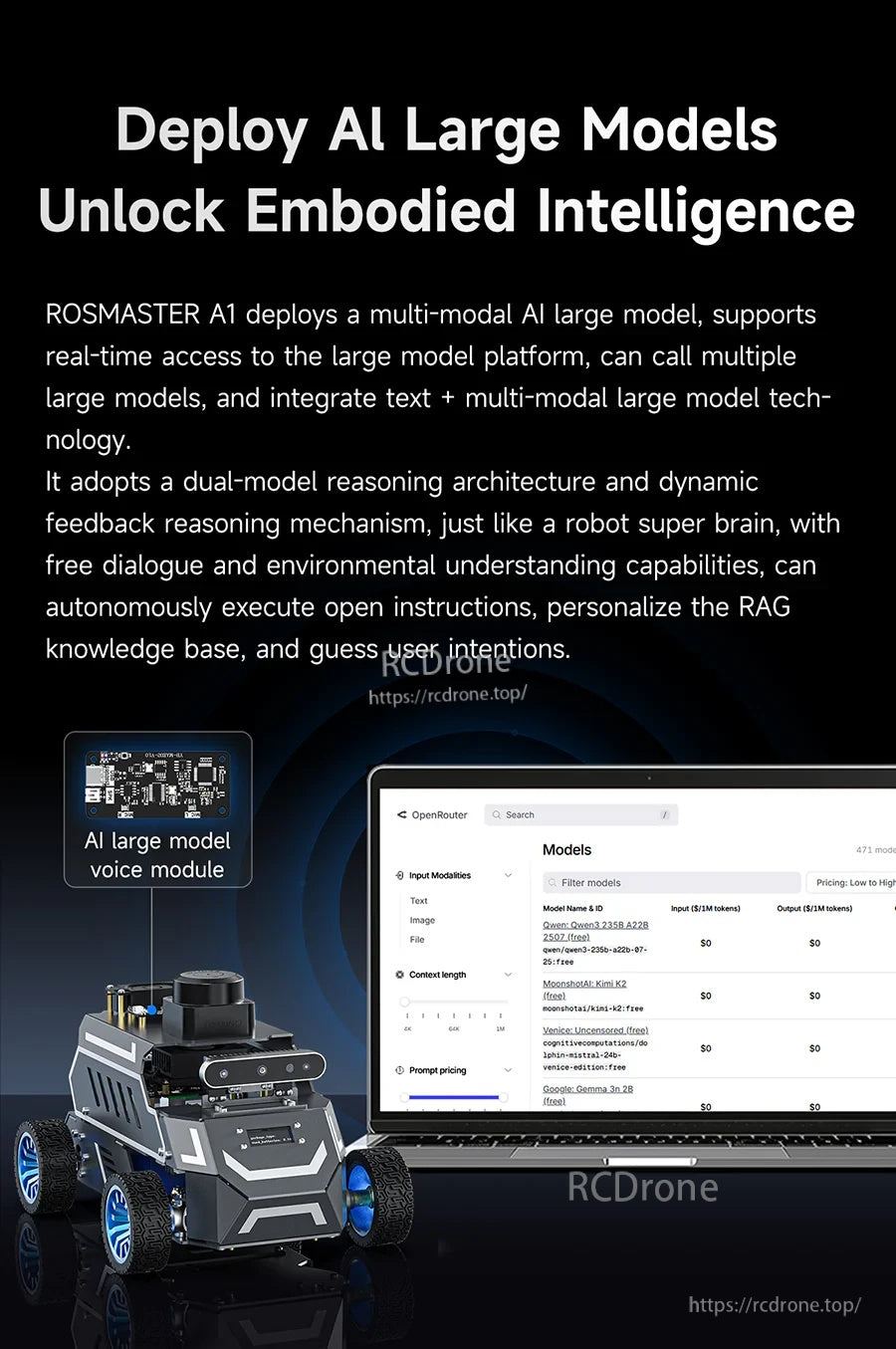
बड़े-मॉडल सेवाओं से कनेक्ट करें और एम्बॉडीड इंटेलिजेंस प्रोजेक्ट्स के लिए आवाज़, पाठ, और दृष्टि वर्कफ़्लो को एकीकृत करें।
तीन मोड—पाठ, आवाज़, और दृष्टि—समृद्ध मानव-रोबोट इंटरैक्शन और कार्य की समझ का समर्थन करते हैं।
एक वाहन-जैसी एकरमैन स्टीयरिंग ज्योमेट्री उच्च-टॉर्क सर्वो और एन्कोडर मोटर के साथ सटीक नियंत्रण के लिए जोड़ी जाती है।
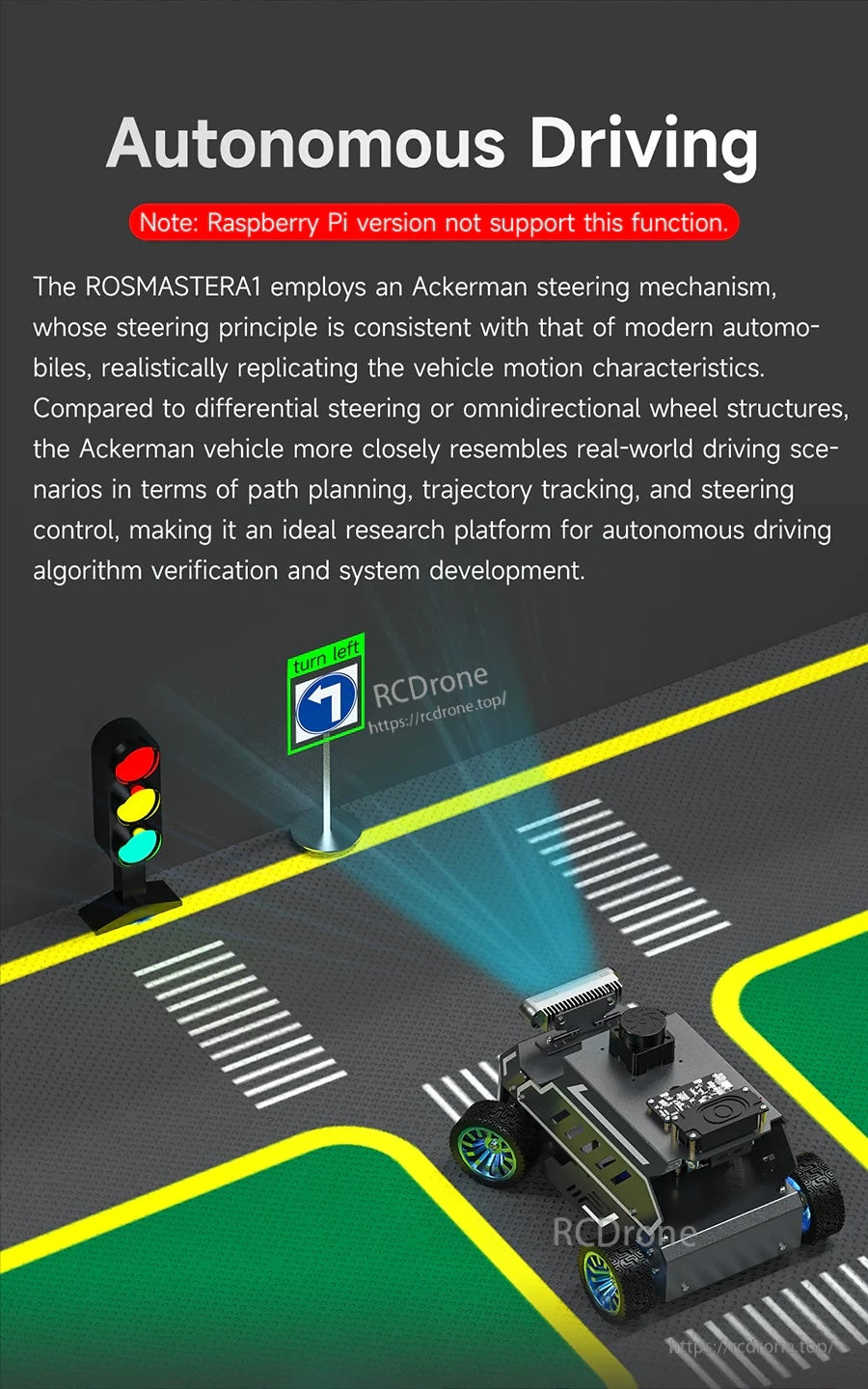
एकरमैन स्टीयरिंग लेन ट्रैकिंग और नियंत्रण एल्गोरिदम सत्यापन के लिए वास्तविक कार व्यवहार की नकल करने में मदद करता है।

उदाहरण स्वायत्तता कार्यों में संकेत पहचान, लेन कीपिंग, पार्किंग व्यवहार, और मार्ग निर्णय तर्क शामिल हैं।
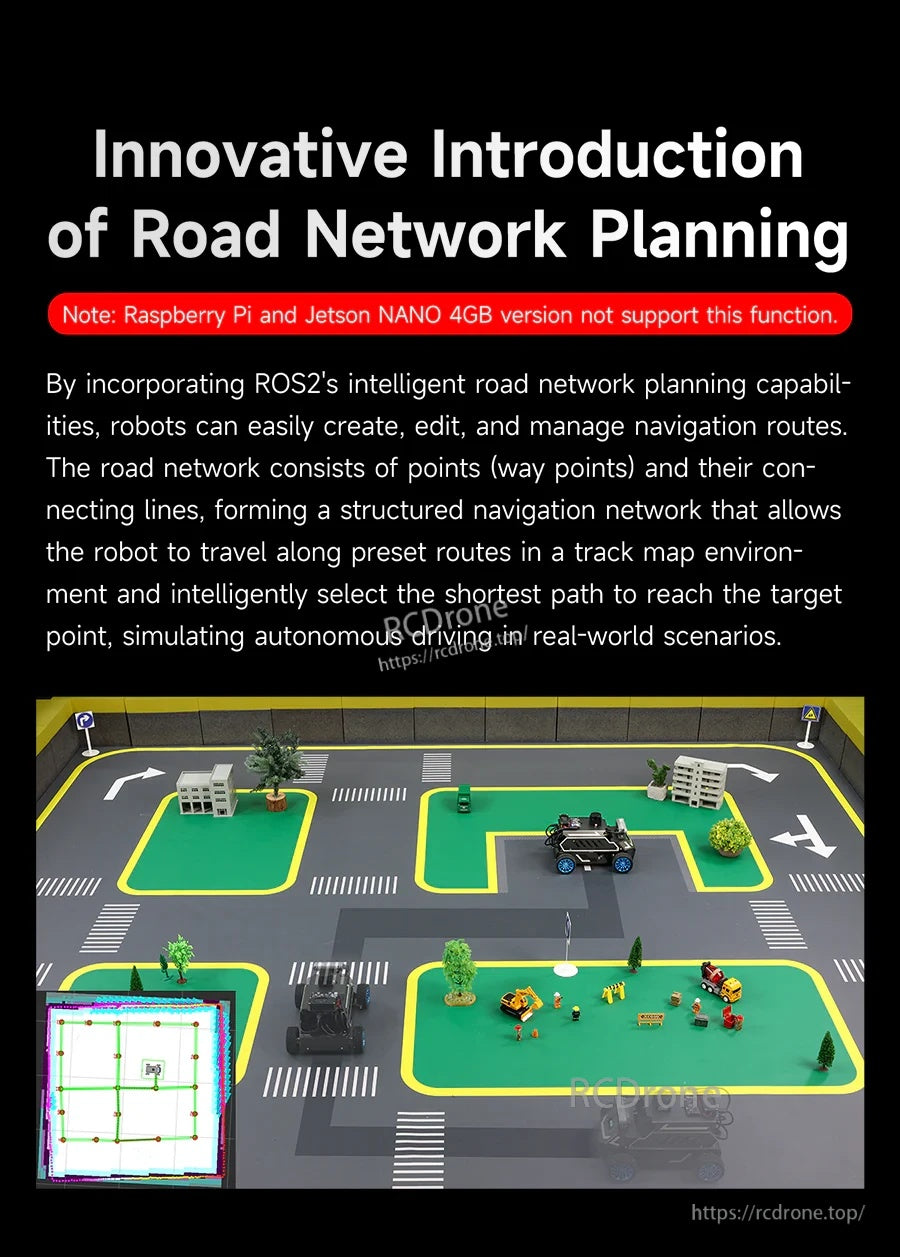
रोड-नेटवर्क योजना ट्रैक-शैली के वातावरण और वेपॉइंट यात्रा के लिए संरचित नेविगेशन मार्गों का समर्थन करती है।
उच्च-स्तरीय उपयोग के मामले धारणा और संवाद को इंटरैक्टिव डेमो, ट्रैकिंग, और प्रश्न उत्तर के लिए मिलाते हैं।
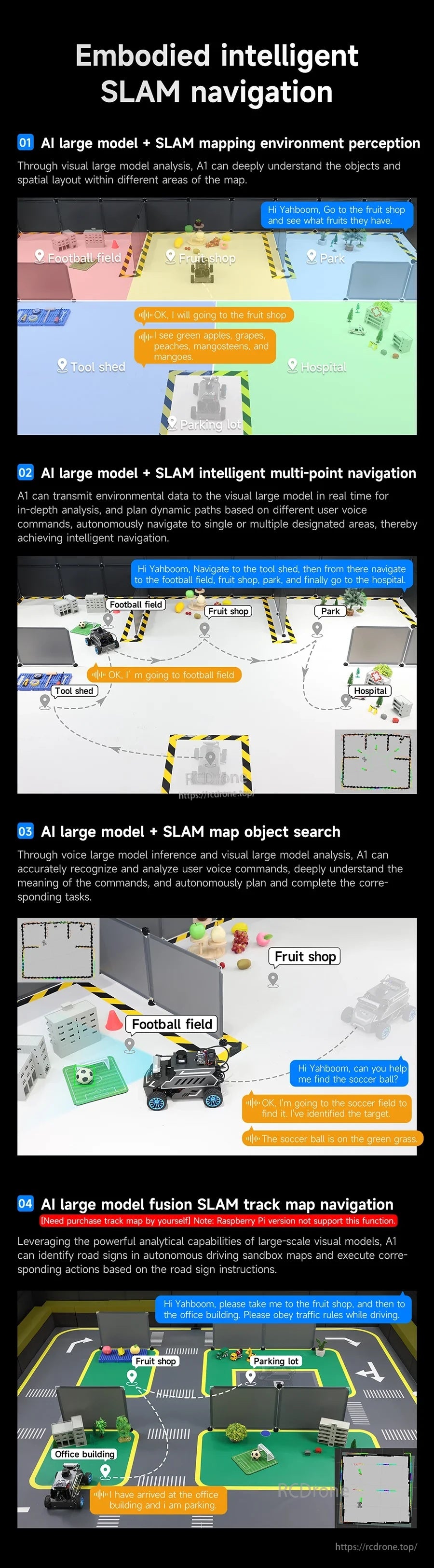
एसएलएएम वर्कफ़्लो इनडोर स्वायत्तता प्रयोगों के लिए मैपिंग, मल्टी-पॉइंट नेविगेशन, और मैप-आधारित खोज को कवर करते हैं।
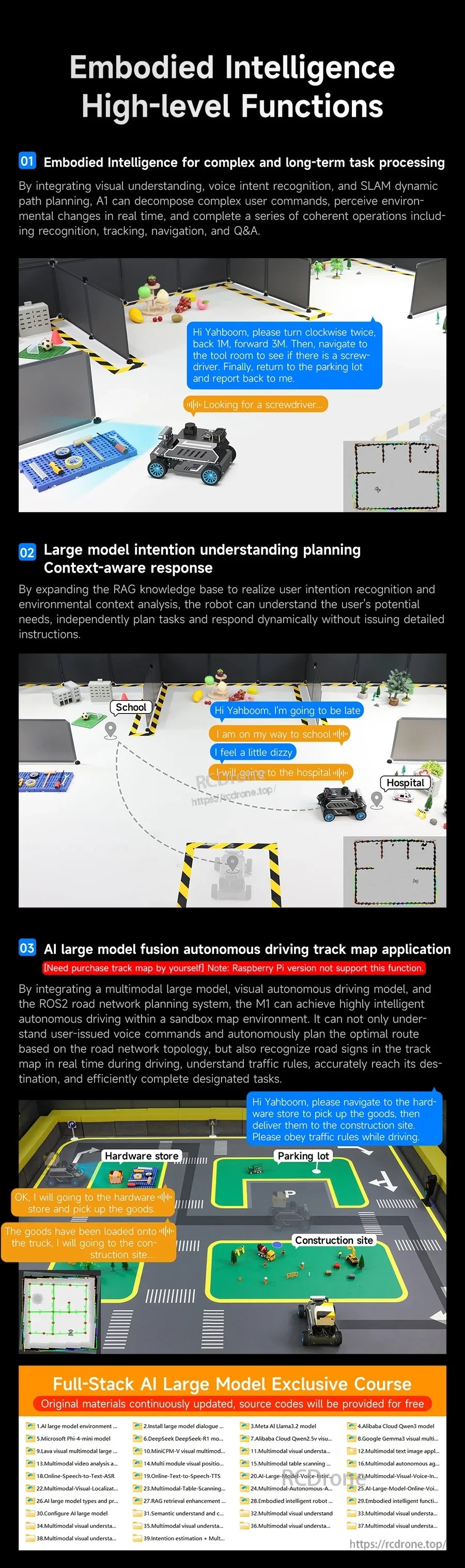
उन्नत व्यवहार पर्यावरण समझ और कमांड व्याख्या पर आधारित होते हैं ताकि नेविगेशन लक्ष्यों को पूरा किया जा सके।
कंट्रोलर मार्गदर्शन आपके सेंसर स्टैक और ROS2 विशेषताओं के लिए कंप्यूट प्रदर्शन और इंटरफेस को मिलाने में मदद करता है।
LiDAR मैपिंग और गहराई संवेदन 2D/3D धारणा, दूरी माप, और नेविगेशन योजना को सक्षम करते हैं।
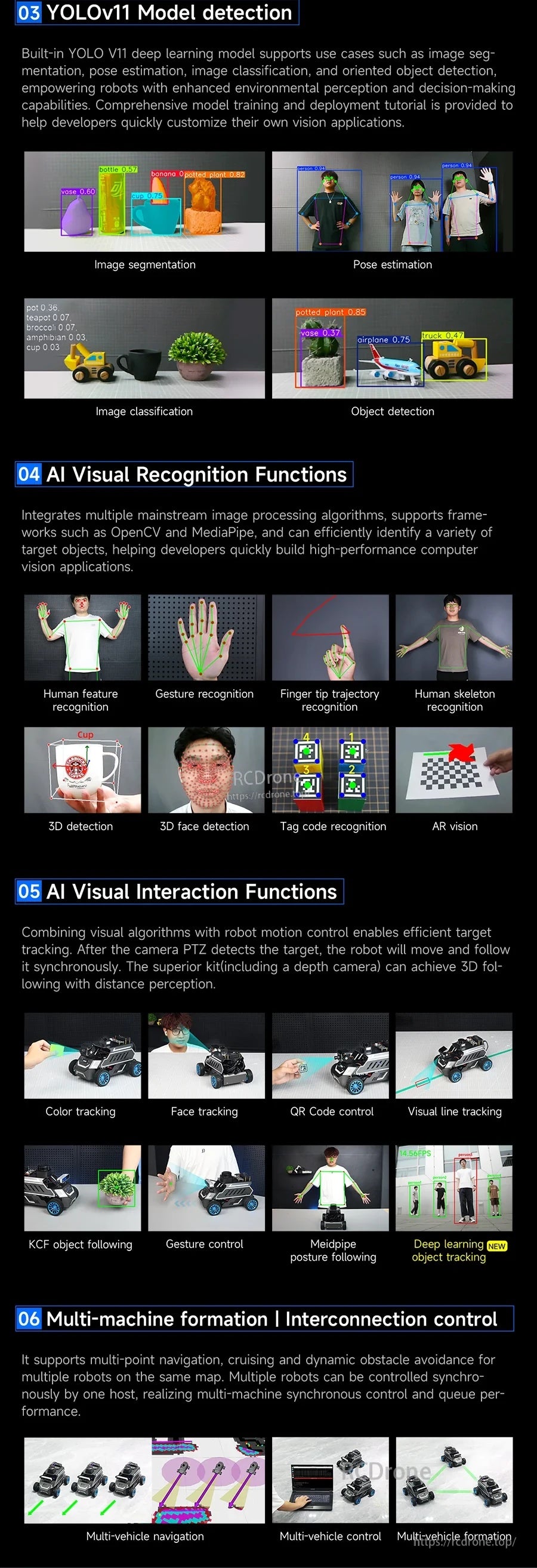
एक कंप्यूटर-विजन टूलकिट वस्तु पहचान, मान्यता कार्यों, और इंटरैक्टिव विजन-आधारित व्यवहारों का समर्थन करता है।
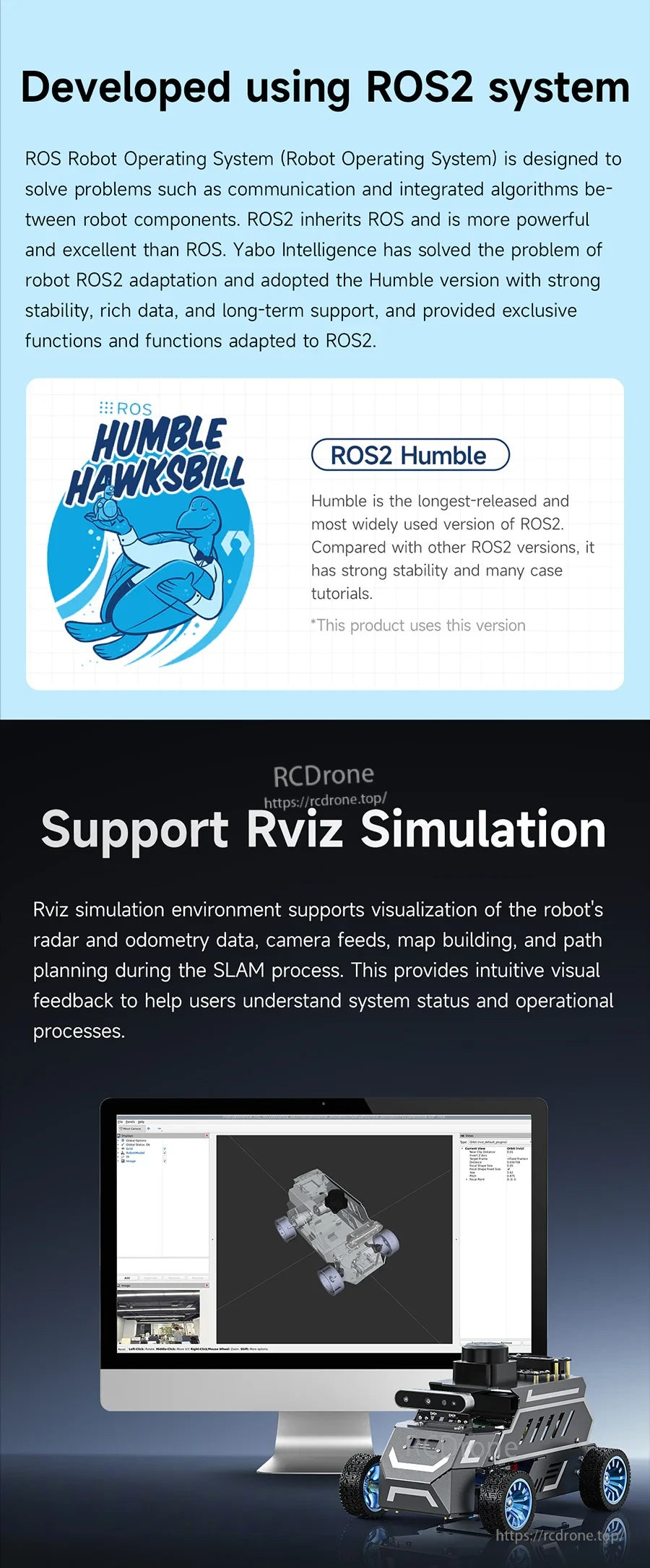
ROS2 हम्बल संगतता और RViz सिमुलेशन तेज विकास, परीक्षण, और दृश्यता का समर्थन करते हैं।
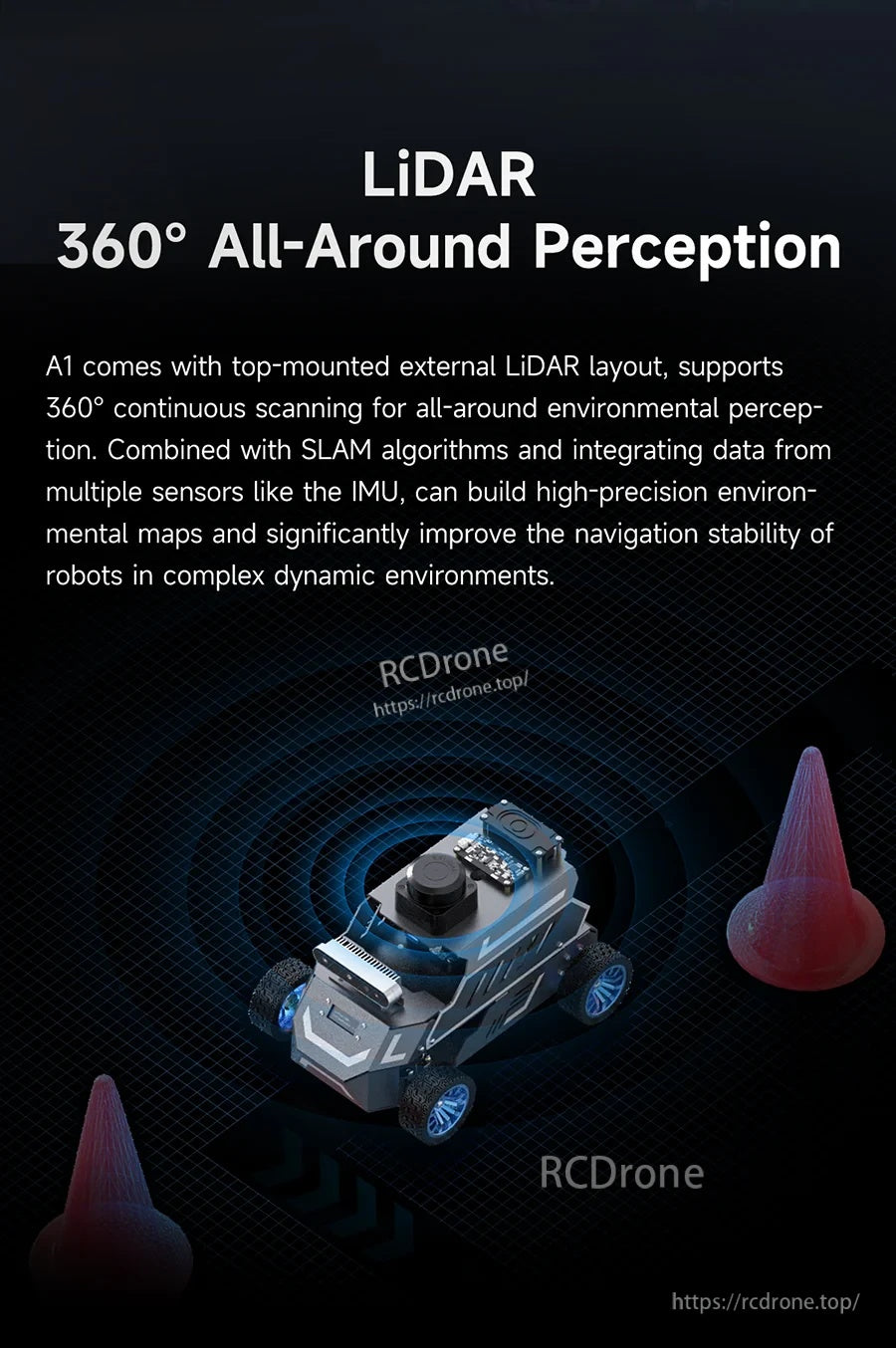
360° LiDAR धारणा गतिशील वातावरण में मैपिंग विश्वसनीयता और बाधा जागरूकता को सुधारती है।

ROSMASTER A1 iOS/Android मैपिंग ऐप, एक कंप्यूटर इंटरफेस, या एक मानक USB वायरलेस कंट्रोलर के माध्यम से क्रॉस-प्लेटफॉर्म रिमोट कंट्रोल का समर्थन करता है।
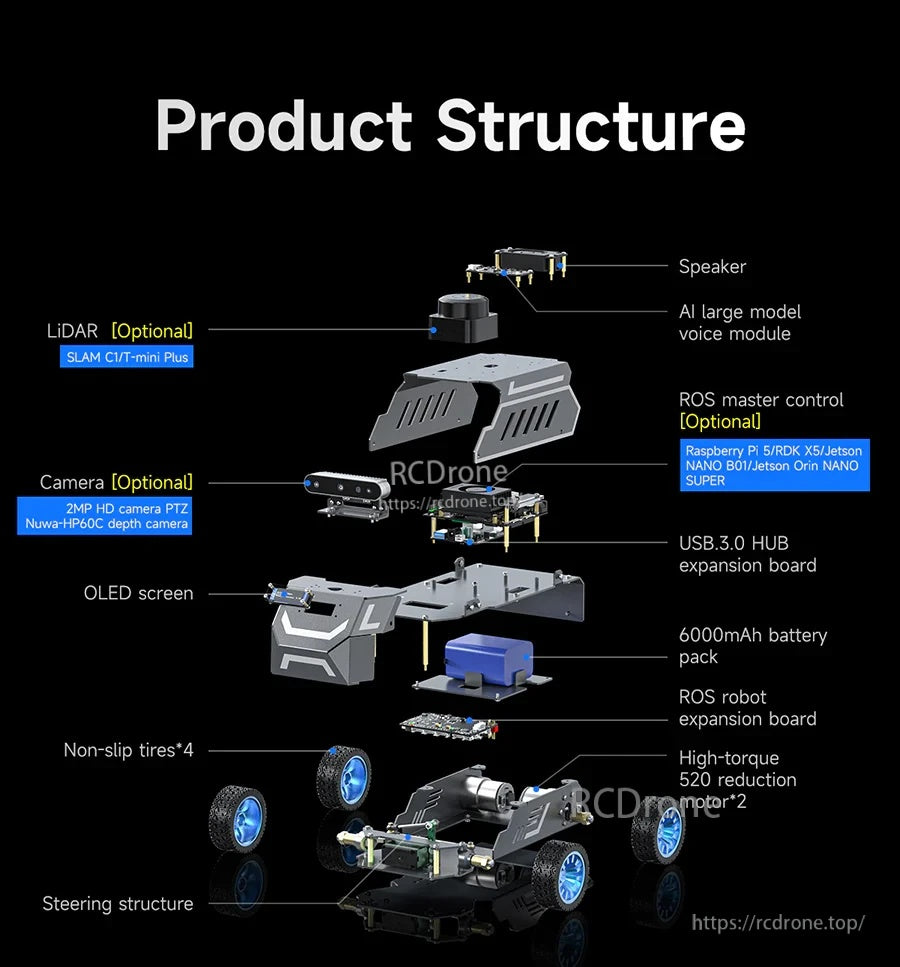
ROSMASTER A1 एक लेयर्ड चेसिस का उपयोग करता है जिसमें 6000mAh बैटरी पैक, USB 3.0 हब विस्तार, और लचीले निर्माण के लिए वैकल्पिक LiDAR या कैमरा मॉड्यूल शामिल हैं।
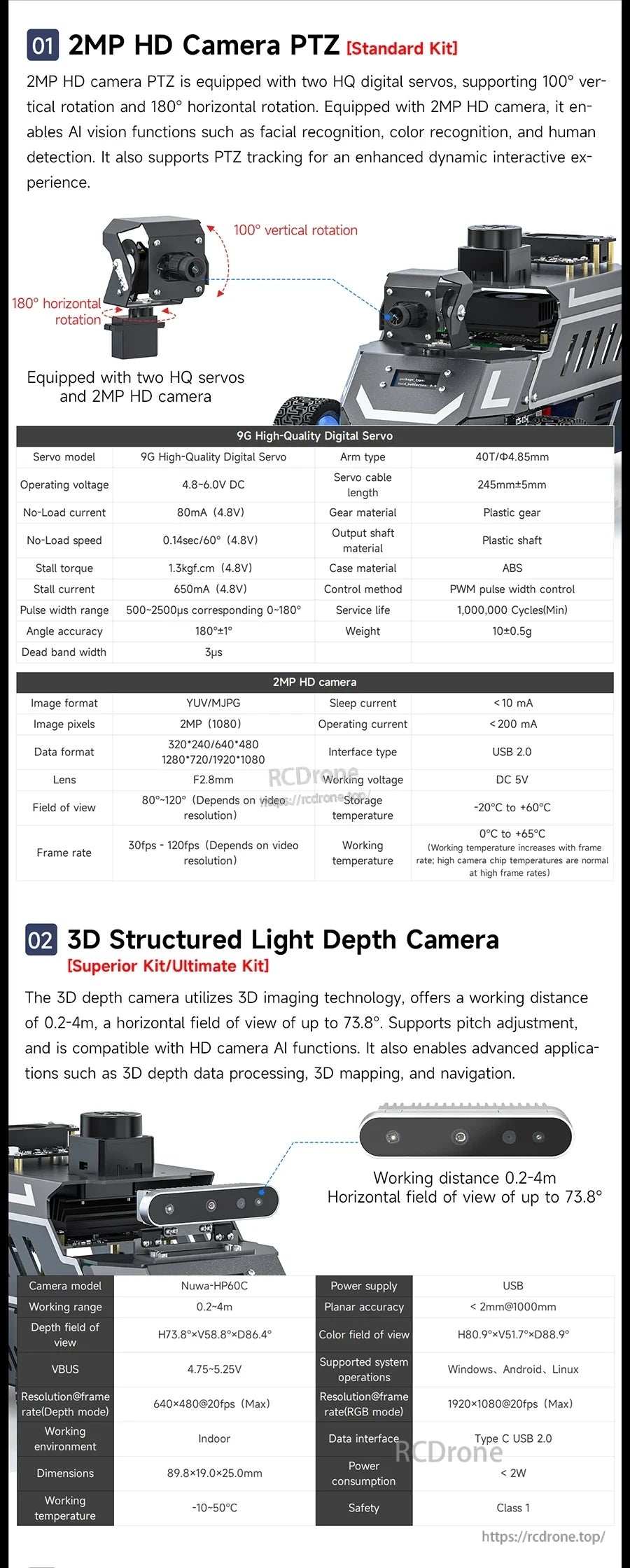
याहबूम ROSMASTER A1 2MP PTZ HD कैमरा के साथ 360° क्षैतिज और 180° ऊर्ध्वाधर घुमाव या 3D संरचित लाइट गहराई कैमरा के साथ 0.2–4 मीटर रेंज का समर्थन करता है।
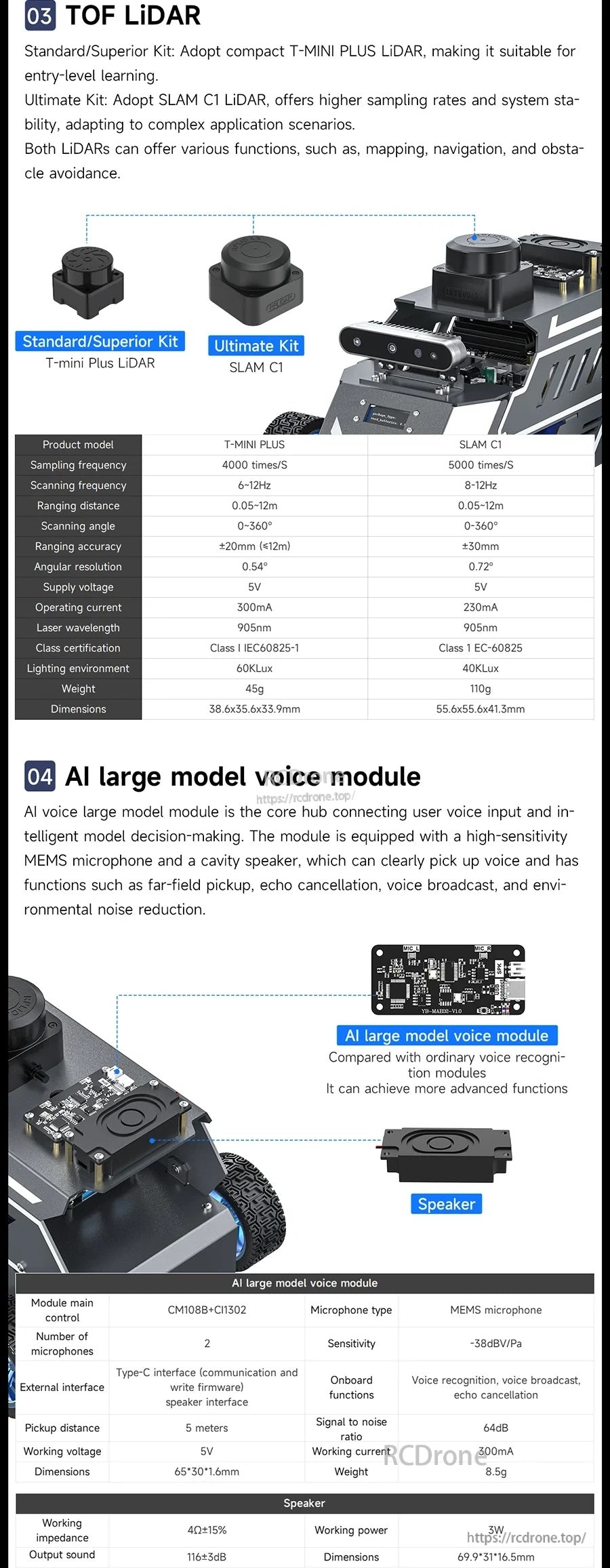
याहबूम ROSMASTER A1 ROS2 रोबोट शीर्ष पर TOF LiDAR और नेविगेशन और वॉयस इंटरैक्शन के लिए माइक्रोफोन और स्पीकर के साथ AI वॉयस मॉड्यूल को एकीकृत करता है।
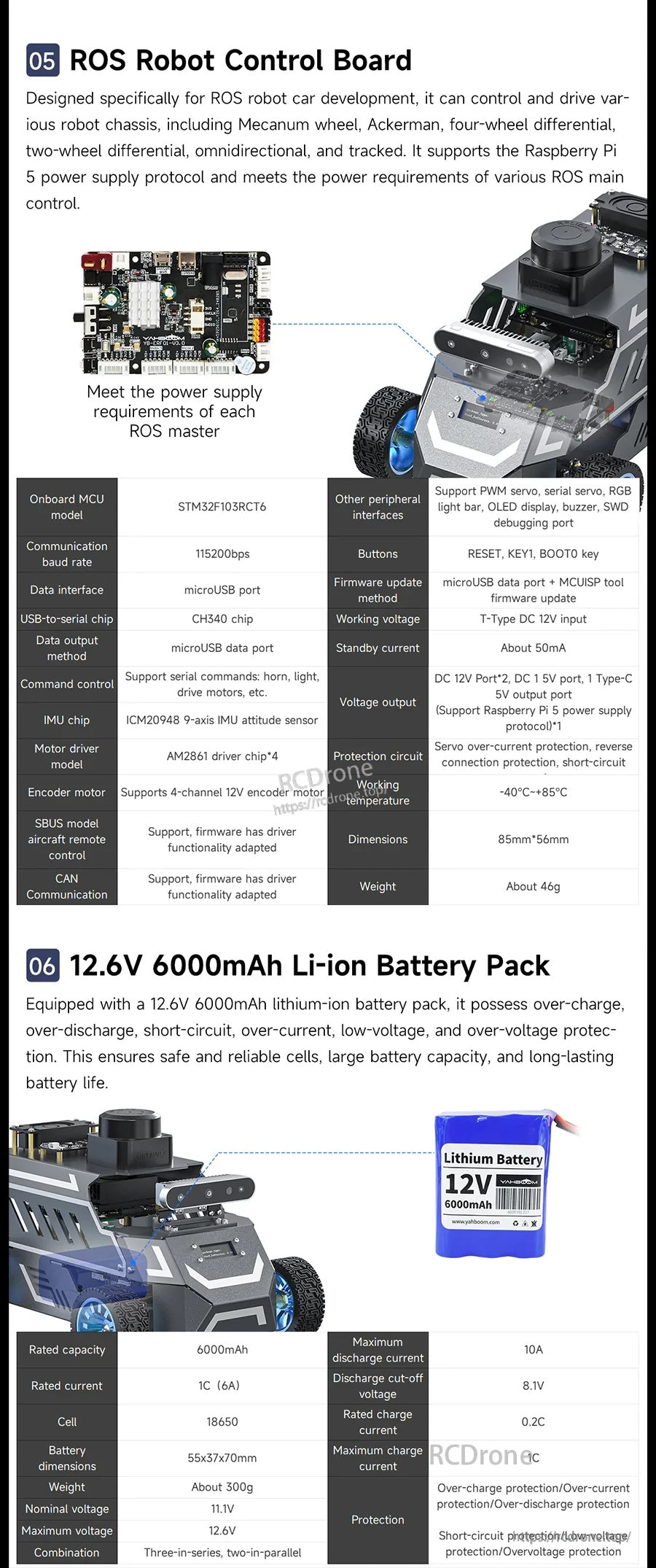
ROBOTMASTER A1 ROS2 रोबोट किट एक ROS रोबोट नियंत्रण बोर्ड को 12.6V 6000mAh ली-आयन बैटरी पैक के साथ जोड़ता है जो निर्माण को शक्ति प्रदान करता है।
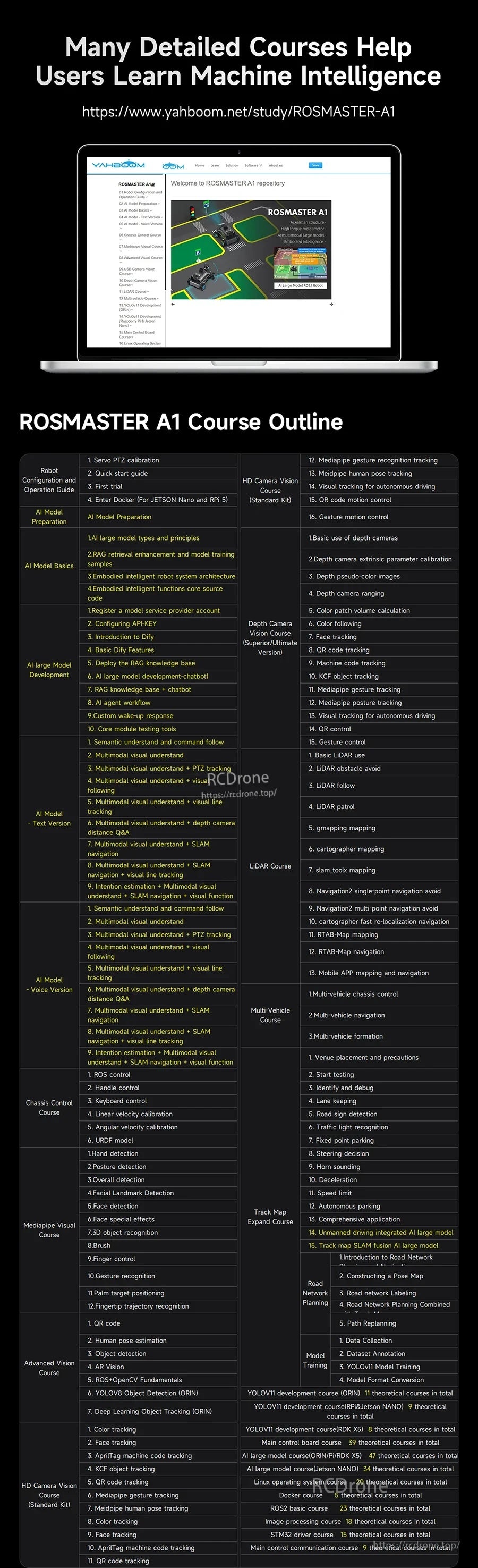
ROBOTMASTER A1 पाठ्यक्रम रूपरेखा सेटअप और बुनियादी नियंत्रण से लेकर मैपिंग और नेविगेशन तक चरण-दर-चरण ROS2 सीखने के विषयों को प्रस्तुत करती है।
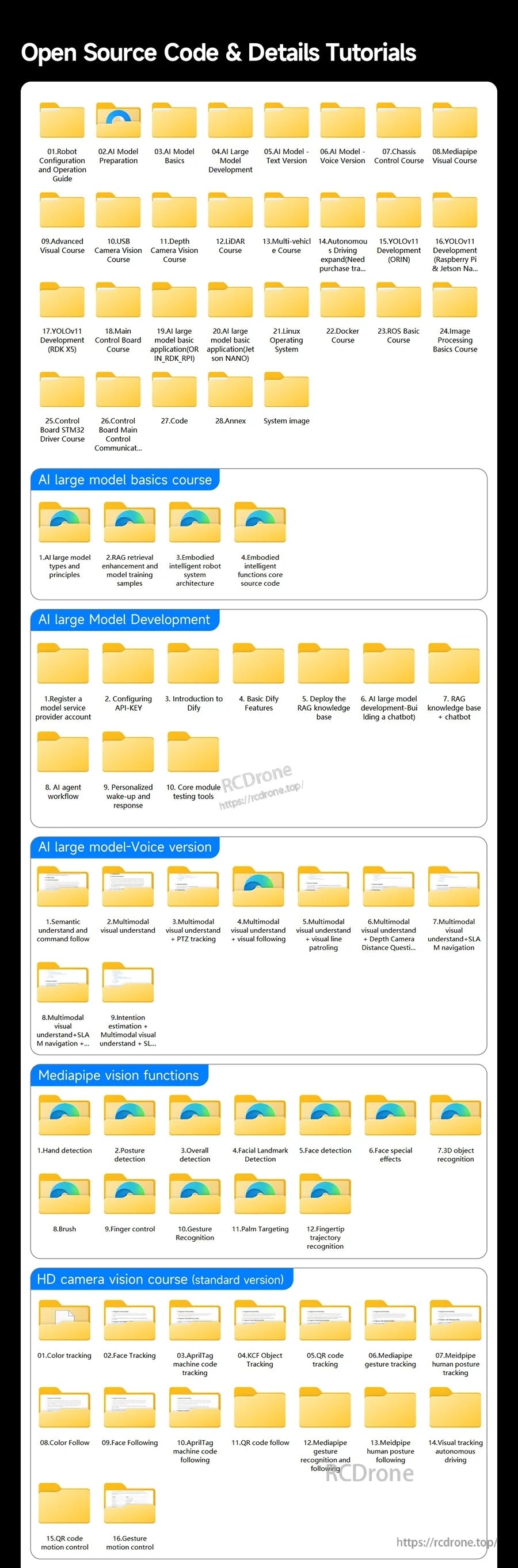
ओपन-सोर्स कोड और चरण-दर-चरण ट्यूटोरियल फ़ोल्डर आपको ROS2 सेटअप, प्रोग्रामिंग, और डेमो के साथ शुरुआत करने में मदद करते हैं।
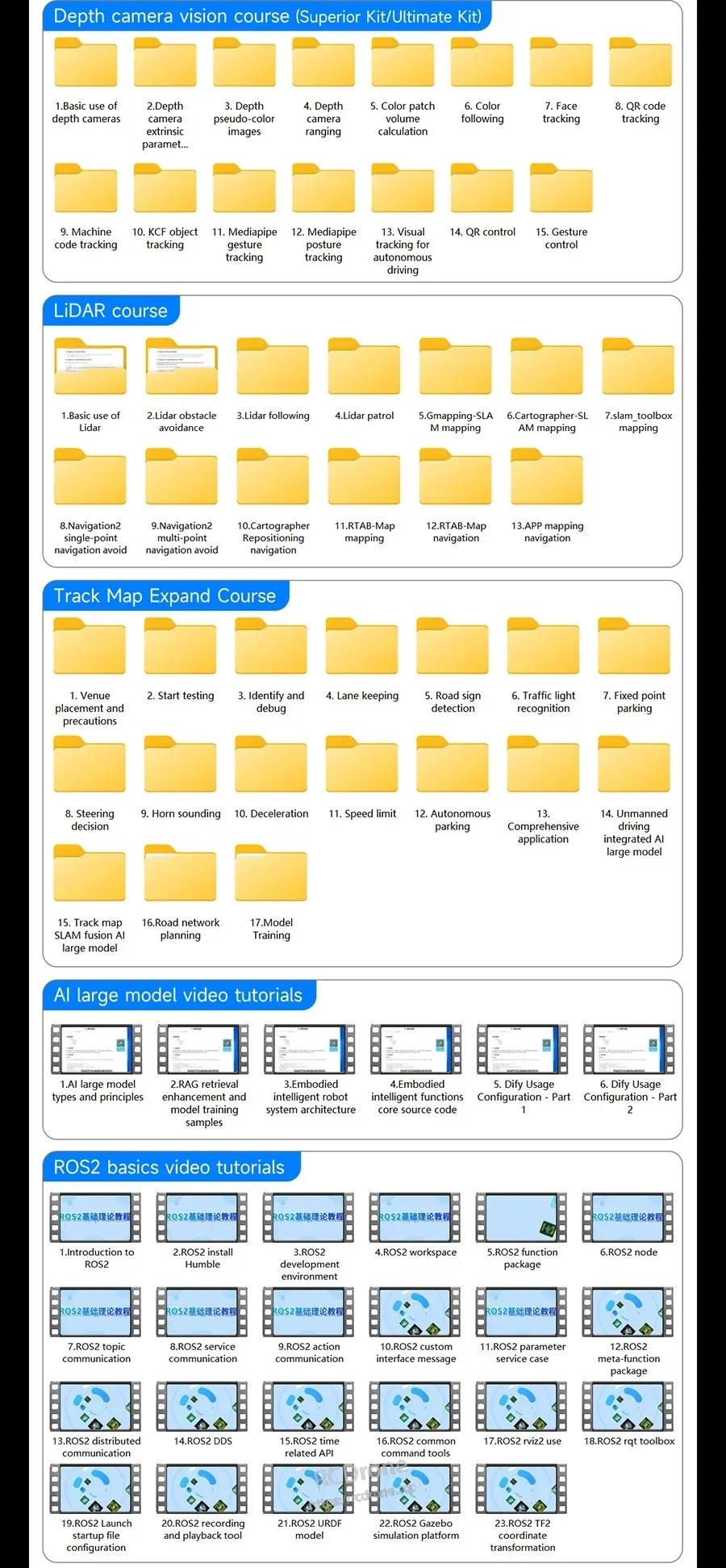
ROBOTMASTER A1 सीखने के संसाधन गहराई कैमरा दृष्टि, LiDAR सेटअप, मैपिंग/ट्रैक विस्तार, और ROS2 मूल बातें संगठित ट्यूटोरियल मॉड्यूल में शामिल करते हैं।
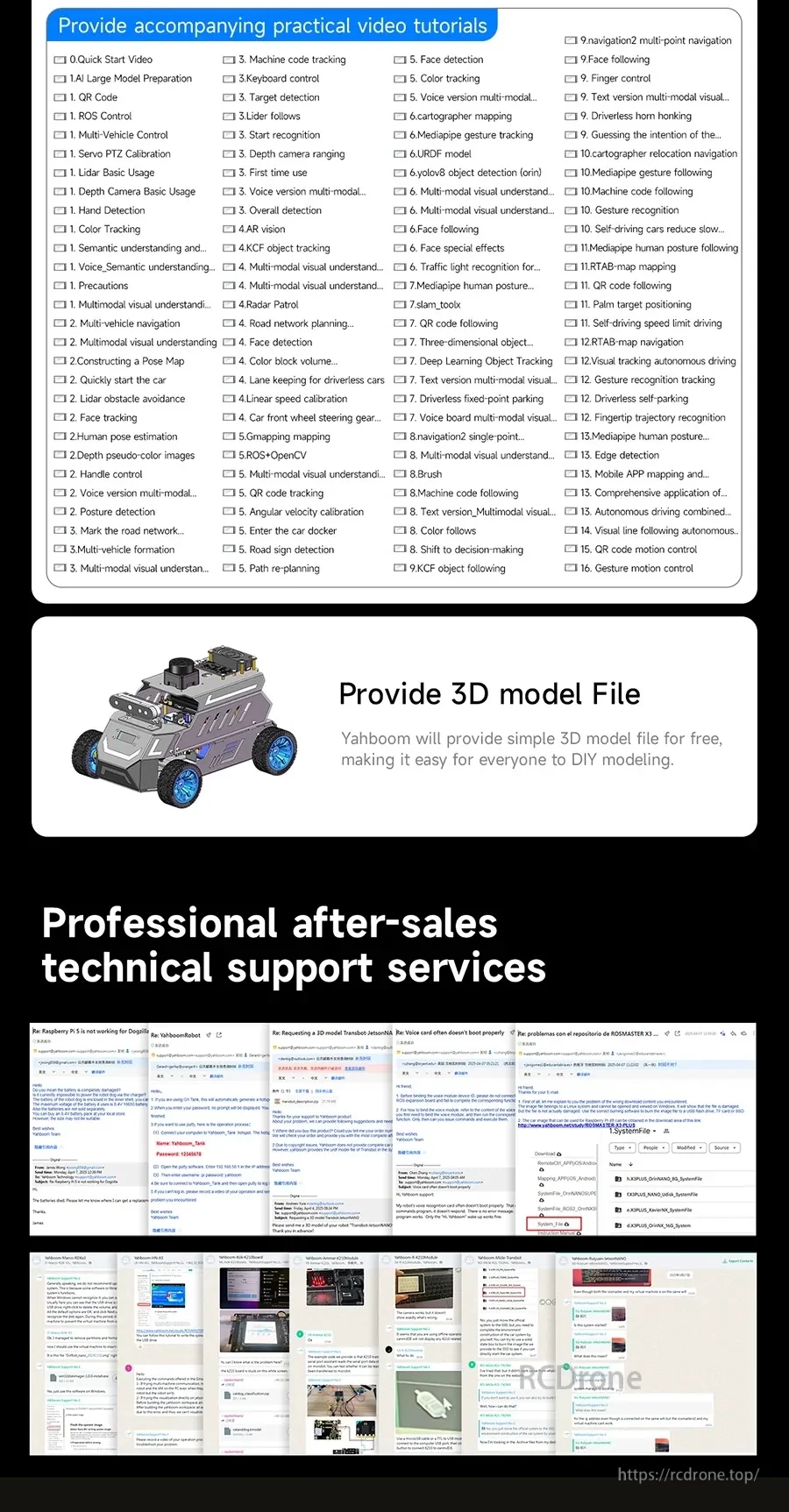
Yahboom ROSMASTER A1 में व्यावहारिक वीडियो ट्यूटोरियल, डाउनलोड करने योग्य 3D मॉडल फाइलें, और सेटअप और सीखने में मदद के लिए बिक्री के बाद तकनीकी समर्थन शामिल है।

ROSMASTER A1 एक एकरमैन स्टीयरिंग चेसिस का उपयोग करता है जिसमें 65 मिमी रबर के पहिये होते हैं और यह RGBD कैमरा और ऑनबोर्ड कंप्यूटर विकल्पों का समर्थन करता है जैसे कि Raspberry Pi 5 या Jetson।
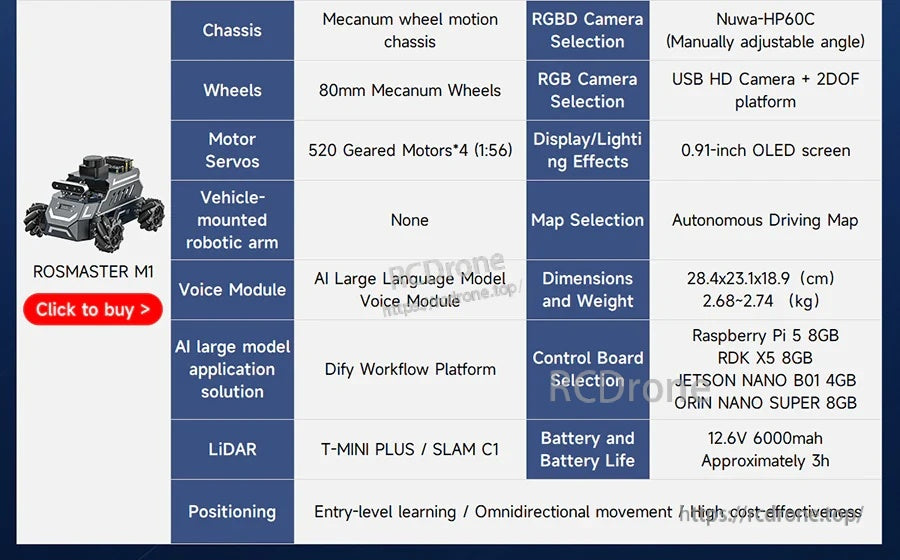
ROSMASTER A1 कॉन्फ़िगरेशन विकल्पों में मेकनम चेसिस हार्डवेयर, RGBD कैमरा और LiDAR चयन, नियंत्रक बोर्ड, और बैटरी विवरण शामिल हैं।
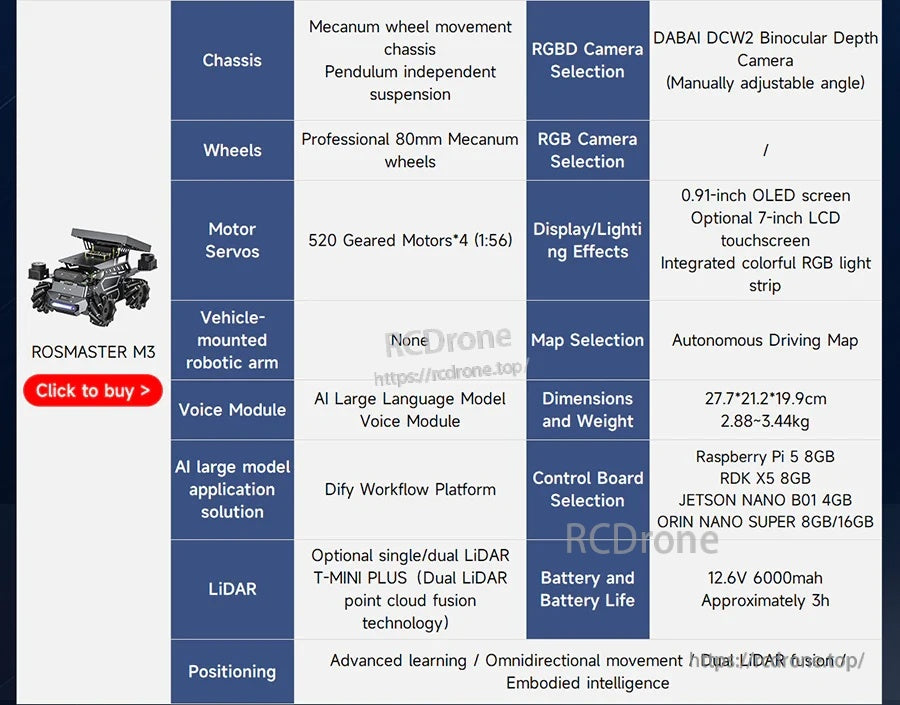
ROSMASTER A1 एक मेकनम-व्हील चेसिस का समर्थन करता है जिसमें वैकल्पिक RGBD कैमरा, LiDAR, और Raspberry Pi और Jetson सहित कई नियंत्रण बोर्ड विकल्प शामिल हैं।
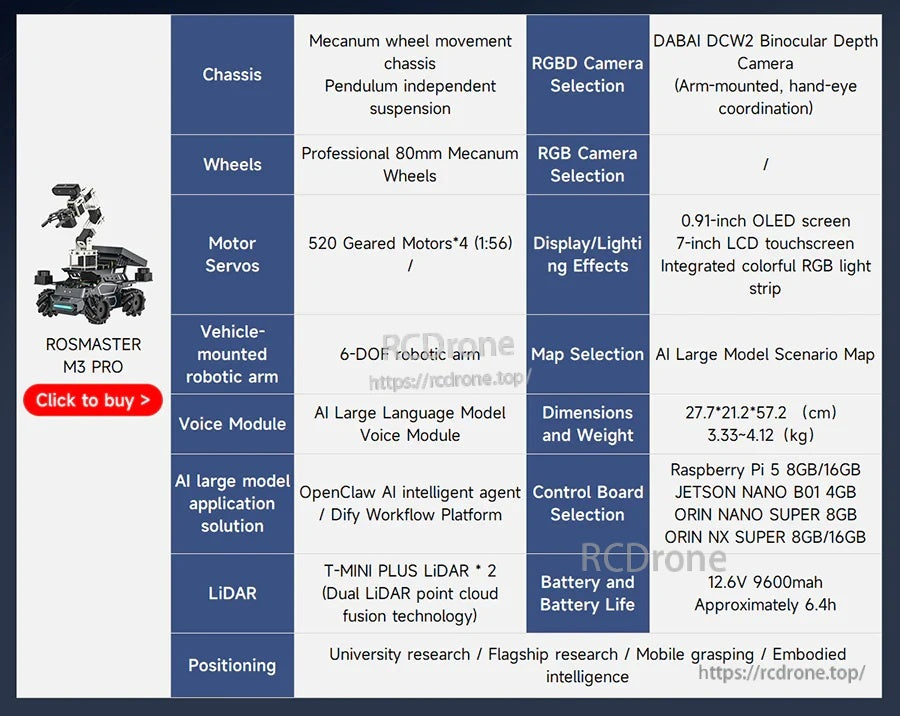
ROSMASTER रोबोट प्लेटफॉर्म एक मेकनम-व्हील चेसिस को RGBD कैमरा और LiDAR मैपिंग मॉड्यूल जैसे विकल्पों के साथ ROS2 विकास के लिए संयोजित करता है।
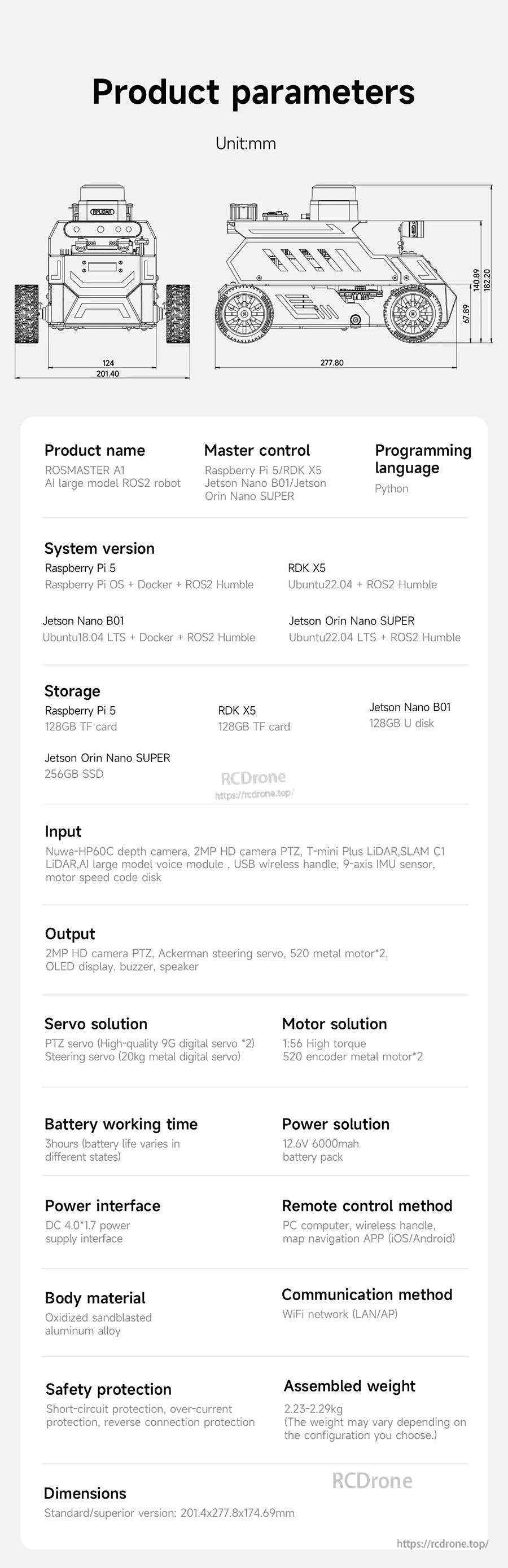
ROSMASTER A1 विनिर्देशों में सिस्टम संस्करण विकल्प, भंडारण, बैटरी कार्य समय, इंटरफेस, और कुल मिलाकर आयाम जैसे प्रमुख विवरण शामिल हैं।
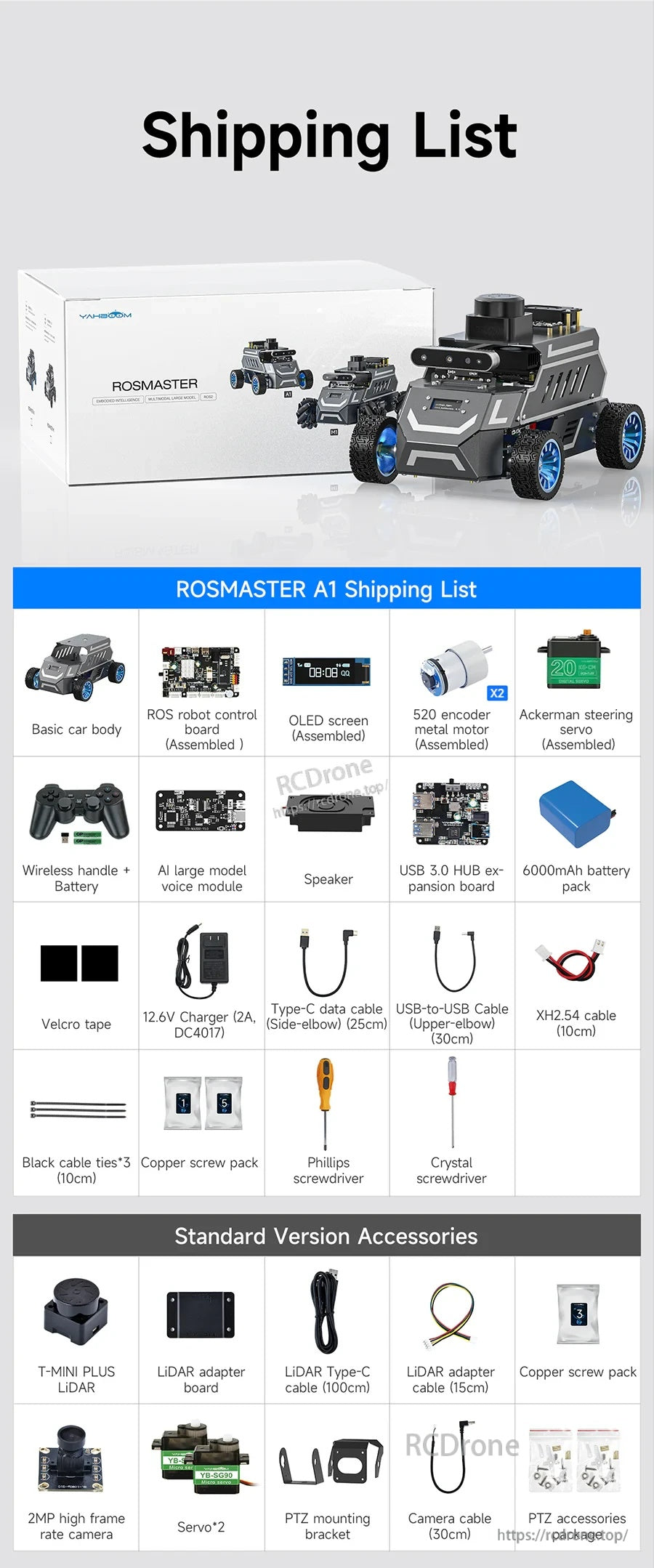
ROSMASTER A1 किट में रोबोट कार चेसिस के साथ-साथ नियंत्रण विस्तार बोर्ड, OLED डिस्प्ले, एन्कोडर मोटर्स, बैटरी, वायरलेस हैंडल, और सेटअप के लिए कनेक्शन केबल जैसे प्रमुख सहायक उपकरण शामिल हैं।

ROSMASTER A1 सहायक उपकरण बंडल में शामिल LiDAR विकल्प, कैमरा मॉड्यूल, एडेप्टर बोर्ड, माउंटिंग ब्रैकेट, केबल, और विभिन्न संस्करणों के लिए स्क्रू पैक सूचीबद्ध हैं।
Related Collections






























